
Wise Objects for Calm Technology
Ilham Alloui, David Esale and Flavien Vernier
LISTIC lab., University Savoie Mont Blanc, 5 chemin de Bellevue, Annecy-le-Vieux, France
Keywords: Introspection, Intelligent Systems, Adaptive Systems, Autonomous Learning, Decentralized Control.
Abstract: In this position paper we identify the design of “wise systems” as an open research problem addressing new
technology-based systems. Increasing complexity and sophistication make those systems hard to understand
and to master. Human users are very often involved in learning processes that capture all their attention
while being of little interest for them. To alleviate human interaction with such systems, as the foundation of
our current research, we propose the concept of “wise object” as the building block. Software-based systems
would then be able to autonomously learn on themselves and on the way humans use them. Humans would
in turn be prompted only when necessary by the system.
1 INTRODUCTION
New technologies are usually designed for meeting
some social/business/political needs or goals.
Among notable new technologies we find
Communicating Objects (COT) and Internet of
Objects (IOT) that increasingly contribute to our
daily life (mobile phones, computers, home
automation, etc.). Systems based on those
technologies become very sophisticated, even to
experienced users. For instance, people at home
usually face at least two problems with home
automation systems: (1) instructions accompanying
the devices are too complex and it is hard for non-
expert users to master the whole behaviour and
capabilities provided by the system; (2) such
systems are usually designed to meet general
requirements through a set of predefined
configurations. Information needed by a user is not
necessarily the same from one to another. A user
may need a set of services in a given context and a
different set of services in another context. A user
does not need to use all what a system could provide
in terms of information or services.
In this position paper, we claim that a system
based on new technologies must be able to: (1)
“know by itself on itself”, i.e. to learn how it
behaves, to consequently reduce the understanding
effort needed by users (even experimented ones); (2)
“know by itself on its usage” to adapt to users
according to the way and to the context it is used in.
In addition like any service-based system (3) such
system should be capable of improving the quality of
services it is offering.
We need “non-intrusive” systems that serve users
while requiring “just some” (and not all) of their
attention and only when necessary. This in a sense
contributes to “calm technology” (Weiser and
Brown, 1996) that “describes a state of technological
maturity where a user's primary task is not
computing, but being human”. As claimed in (Case,
2010), new technologies might become highly
“interruptive” in human’s daily life. Though “Calm
technology” has been proposed first by Weiser and
Brown in early 90’s (Weiser and Brown, 1996), it is
more than ever, a challenging issue in technology
design.
We need systems composed of “autonomous”
entities that are able to independently adapt to a
changing context.
Many approaches are proposed to design and
develop the kind of systems we target: multi-agent
systems (Wooldridge, 2009), intelligent systems
(Roventa and Spircu, 2009), adaptive systems
(Salehie and Tahvildari, 2009), self-X systems
(Huebscher and Mccann, 2008). In all those
approaches, a system entity (or agent) is able to
learn on its environment (including the other
entities) through its interactions. Our intention is to
go a step forward by enhancing a system entity with
the capability of learning by its own on the way it
has been designed to behave in. We see at least two
benefits to this: (a) a decentralized control: as each
entity evolves independently from the others, it can
468
Alloui I., Esale D. and Vernier F..
Wise Objects for Calm Technology.
DOI: 10.5220/0005560104680471
In Proceedings of the 10th International Conference on Software Engineering and Applications (ICSOFT-EA-2015), pages 468-471
ISBN: 978-989-758-114-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

control actions to perform at its level according to
the current situation; (b) each entity can improve its
performance and then the performance of the whole
system.
Our work addresses those issues through the
concept of “Wise Objects”. We call “wise object”, a
software-based entity that is able to learn on itself
and also on the others (e.g. its environment and
users). “Wisdom” refers to the experience such
object acquires by its own during its life. We
intentionally use terms dedicated to human as a
metaphor. When human better succeed in observing
the others, a wise object would have more facility to
observe itself by introspection. A wise object is for
instance a vacuum cleaner that could learn how to
clean a room depending on its shape and
dimensions. In the course of time, the object would
in addition improve its performance (less time, less
energy consumption, etc.).
In section 2, through an illustrating example on
home automation, we briefly present our approach,
system requirements and design principles.
2 RESEARCH ISSUES
2.1 Requirements
To meet users’ requirements cited so far, namely: (1)
the ability of a system to reduce the effort needed by
its users to understand system behaviour; (2) the
capability of a system to adapt to its users according
to the way and the context it is used in; (3)
improving the quality of services it is offering; we
adopt an approach founded on the concept of “Wise
objects” (WO). Wise objects refer to objects that
have the ability to learn on their behaviour and also
on the behaviour of their users according to
changing context. In this paper we use the following
definition from (Dey and Abowd, 2000): “Context is
any information that can be used to characterize the
situation of an entity. An entity is a person, place,
object that is considered relevant to the interaction
between a user and an application, including the
user and applications themselves.” This definition is
generic enough to apply to software-based entities
(implemented through class objects that represent
the “low level” part of context).
To illustrate our purposes, we use a simple
example in home automation domain. Let us
consider a system composed of a roller shutter
(actuator) and a control key composed of two
buttons (sensors). In the very general case and in a
manual mode, with a one-button control key, a
person uses the button to: bring the shutter either to
a higher or to a lower position. With a second
button, the user can tune inclination of the shutter
blades to get more or less light from the outside. As
the two buttons cannot be activated at the same time,
the user must proceed in two times: first, obtain the
desired height (e.g. 70%) then the desired inclination
(e.g. 45%). For such systems, three roles are
generally defined: “System developer”, “System
configurator” and “End-user”. Assume an end-user
is at his office and that according to the moment and
to the weather, his/her requirements for the shutter
change (height and inclination). This involves the
end-user all along the day.
Our idea is that sort of system could be designed
to alleviate its interactions with the end-user. In our
example, the “wise” system would use some
knowledge from past experiences to change the
shutter height and inclination when needed.
Moreover, before the first use of the system by end-
users, the “wise” system could propose to the
“system configurator” a first “picture” of the
behaviour of system components. Such picture is the
result of an introspection process done by each
component of the system (i.e. control key and
shutter). Each component, i.e. “wise object”, has the
ability to learn on its behaviour. The system
configurator could then complete and/or correct
information provided by the “wise” system so that
the home automation system could perform. S/he in
particular defines “valid” coordination rules among
system components; for example, a switch on action
on the control key must be followed by a raise
action on the shutter.
The design of “wise” systems raises many open
research issues, among them:
How to design such systems with the
minimum of “intrusion” in the way home
automation systems are usually developed?
How could individual components learn on
their behaviour?
How to put together knowledge coming
from autonomous components?
How could the automation system learn
about the way it is used?
In the following section, we give an overview of
the approach we are working on.
2.2 Approach
Our approach is based on the concept of “wise
object” as the building block for “wise” systems. We
address open issues cited above as follows:
WiseObjectsforCalmTechnology
469

To design “non intrusive” systems, both for
users (with different roles: system developers,
system configurators and end-users), we
propose a framework of “wise objects” from
which a system inherits its “wisdom”;
Each system entity inheriting from Wise Object
(WO) class will have the ability to learn on
itself and on its usage by others.
In the system a particular object called
Assembly Object is in charge of putting together
individual WOs behaviours. A WO instance
does not know the other WO instances in the
decentralized system.
As already said, a Wise Object (WO) is an object
that knows itself by its own, i.e. its knowledge is not
obtained from an external database. This acquisition
is performed by introspection and monitoring.
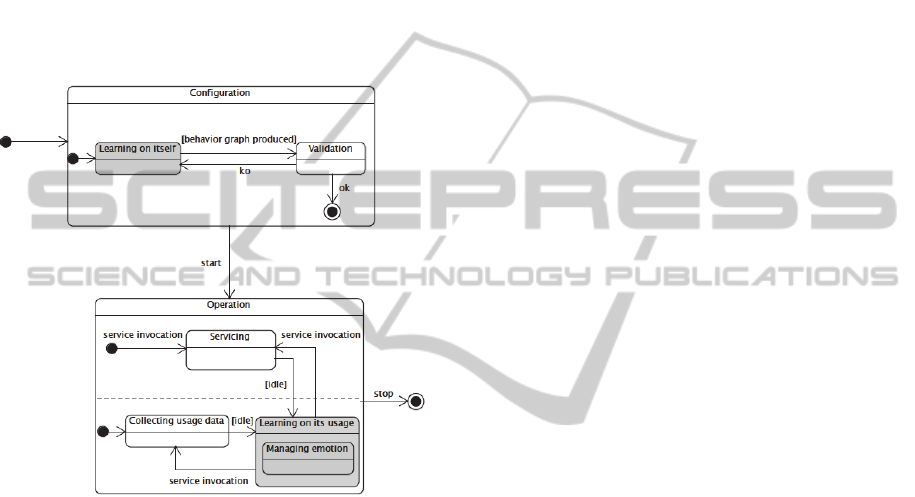
As depicted by Figure 1, a WO life-cycle
involves two main steps: Configuration and
Operation. When an instance of WO Class is created
the object has no knowledge about the services it is
expected to provide.
At Configuration step, a WO acquires
knowledge about its capabilities (i.e. services
implemented as methods) thanks to introspection
mechanisms we defined in WO class. Thus, a WO
object discovers services it is intended to offer and
constructs a behaviour graph of all its possible states
and all its possible transitions when it invokes those
services. Transitions in the behaviour graph
correspond to the object method invocations. A WO
object can easily obtain the set of its methods by
introspection. A state in the graph behaviour is
defined by the attribute values of the object. When a
WO instance is created, the object is in its initial
state. The other states are computed by method
invocation. Each invocation can move the object
into a new state or let the object into its current state.
When all methods are invoked on all known states,
the behaviour graph is considered as complete. What
is worth noting here is that in “Learning on itself”
sub state, a WO is able to act in an autonomous way,
i.e. with no external interaction. This results a
behaviour graph that could be either incomplete (e.g.
because it requires external information) or not valid
(e.g. because some transitions are not realistic). A
“validation” sub state involving users is required for
those reasons. This sub state is in particular
necessary for assembling behaviour graphs of
system WO instances. Indeed up to now, a WO
instance has learnt only about its behaviour.
In addition to WO objects, we designed an
Assembly Object that puts together graph
behaviours of participating WO instances. An
Assembly Object assembles behaviour graphs in a
way similar to process composition in FSP (Finite
State Processes) algebra (Magee and Kramer, 2006).
In a system at work, each service invocation is
followed by the requested service delivery (i.e.
executing the corresponding object method). We
then can view object method execution as an atomic
action, and, coordination among concurrent WO
instances as a composition of their behaviour graphs
from a process perspective (i.e. ordering constraints
on object method execution). It is in the charge of
the system configurator to define the valid
“assembly” or coordination rules. In our illustrating
example, System configurator defines the following
rule: a switch on must be followed by shutter roll
down. According to this rule, the Assembly Object
deactivates all transitions that do not conform to the
expected rules.
When the Operation step starts, a WO instance is
ready to learn about its usage. It collects data
(Collecting usage data) each time a service is
invoked. Those data correspond to the statistics on
state changes or the discrete-time Markov chain of
the usage. As the behaviour graph is known
(Configuration step), the Markov chain is computed
by monitoring method invocations on the object.
This computation is done by the WO instance when
it is in idle, i.e. it is not executing a service
(Learning on its usage). In this step, when an
uncommon case occurs (e.g. a service that has never
been invoked by a user before), the WO instance
handles this situation in the Managing emotion sub
state. The word “emotion” is another metaphor to
qualify unusual situations.
Up to now, we considered atomic objects (i.e.
not composed of other objects). One more important
issue is then: in a hierarchical system of WOs (i.e. a
WO composed of WOs), how can knowledge from
low-level WOs be managed by high-level WOs? The
amount of knowledge can be important but not
always relevant to high-level WOs, in particular if
this does not bring new information. Thus, it is more
relevant for the system to translate knowledge from
low to high-level WO only if knowledge evolves or
if the usage of WO changes. If we consider that the
capabilities of a WO cannot change, two questions
are raised:
• how can a WO detect a change on its usage?
• is this change relevant to the high-level WO?
We see the former as a fuzzy problem where the
change can be expressed as a distance to a common
usage reference. Regarding the second question, we
consider that a low-level WO cannot “say” if a
change on its usage has an impact on its high-level
ICSOFT-EA2015-10thInternationalConferenceonSoftwareEngineeringandApplications
470
WO. Only a high-level WO can define if a change in
its low-level WOs affects it. Thus, when a usage-
related change appears, a WO must send information
to its high-level WOs. These changes can be of a
different nature: change on the frequency of usage
(objects are more or less frequently used), change on
the used capabilities... We refer to this nature of
changes as emotion. A WO is stressed if its use is
more frequent than its common use. A WO is
surprised if a capability is uncommonly used. This
approach raises a new question: how emotions can
be merged into high-level WO? This last problem
requires an information fusion solution.
Figure 1: Wise Object behaviour.
WO instance gets out from this sub state each time a
service is invoked, and, it returns into it each time
the WO instance is idle. It is worth noting that the
service invocation event and the idle state are two
synchronisation points among the concurrent states
of Operation. We have separated the “wise” part of
a WO instance from its “common usage” part. We
consider that this is essential to meet “non
intrusiveness” requirement. Another design issue is
that we have highlighted states where a WO instance
needs introspection (grey coloured states in Figure
1). We use the metaphor “dream” for those states to
distinguish them from “real” states (white states in
Figure 1) where the WO instance is delivering
requested services. An important issue is that when
the object dreams, it cannot affect its environment.
Thus, a WO must manage its interactions with the
other objects. One of the best ways, in our point of
view, to manage these interactions is to use an event
bus. A WO instance can then activate or not the
events according to its state.
3 CONCLUDING REMARKS
Our current research addresses the problem of how
to design autonomous systems that limit the
involvement of their users to what is necessary. We
propose the concept of “wise object” as the building
block of such systems. As proof of concept, we are
currently developing a Java framework for
implementing this kind of systems with the
minimum intrusion in the application code. Object
classes produced by a developer inherit the
behaviour of “Wise object” (WO) class. An
instantiated system is then a “wise system”
composed of “wise objects” that interact through an
event bus according to “publish-subscribe” design
pattern. We believe that “wise systems” is a
promising approach to help humans serenely
integrate new technologies in their daily life.
REFERENCES
Dey, A. K., Abowd, G. D., 2000. Towards a Better
Understanding of Context and Context-Awareness. In
CHI 2000. Workshop on the What, Who, Where,
When, and How of Context-Awareness.
Weiser, M., Brown, J. S., 1996. Designing Calm
Technology. In PowerGrid Journal, v 1.01
(http://powergrid.electriciti.com/1.01).
Case, A., 2010. We Are All Cyborgs Now. In TED: Ideas
Worth Spreading (http://www.ted.com/
talks/amber_case_we_are_all_cyborgs_now.html).
Wooldridge, M., 2009. An Introduction to MultiAgent
Systems, John Wiley & Sons, 2nd edition.
Roventa, E., Spircu, T., 2009. Management of Knowledge
Imperfection in Building Intelligent Systems. In
Studies in Fuzziness and Soft Computing, Springer, v
227.
Salehie, M., Tahvildari, L., 2009. Self-adaptive software:
Landscape and research challenges. In ACM
Transactions on Autonomous and Adaptive Systems
(TAAS), v 4.2, No. 14.
Huebscher, M. C., Mccann, J. A., 2008. A survey of
Autonomic Computing – degrees, models and
applications. In ACM Computing Surveys (CSUR),
v40.3, No. 7.
Magee, J., Kramer, J., 2006. Concurrency: state models
and java programs. Wiley, 2nd edition.
WiseObjectsforCalmTechnology
471
