
Gramophone Noise Reconstruction
A Comparative Study of Interpolation Algorithms for Noise Reduction
Christoph F. Stallmann and Andries P. Engelbrecht
Department of Computer Science, University of Pretoria, Pretoria, South Africa
Keywords:
Gramophone Records, Interpolation, Audio Reconstruction, Polynomials, Signal Modelling.
Abstract:
Gramophone records have been the main recording medium for seven decades and regained widespread pop-
ularity over the past few years. Records are susceptible to noise caused by scratches and other mishandlings,
often making the listening experience unpleasant. This paper analyses and compares twenty different inter-
polation algorithms for the reconstruction of noisy samples, categorized into duplication and trigonometric
approaches, polynomials and time series models. A dataset of 800 songs divided amongst eight different gen-
res were used to benchmark the algorithms. It was found that the ARMA model performs best over all genres.
Cosine interpolation has the lowest computational time, with the AR model achieving the most effective inter-
polation for a limited time span. It was also found that less volatile genres such as classical, country, rock and
jazz music is easier to reconstruct than more unstable electronic, metal, pop and reggae audio signals.
1 INTRODUCTION
Gramophone records were the first commercial audio
storage medium with the introduction of Berliner’s
turntable in 1889 (Wile, 1990). Records continued
to be widely used for more than seven decades, un-
til they were replaced by the compact disc (CD) in
the late 1980s. Although downloadable digital music
has become the forerunner in the 20
th
century, gramo-
phone sales have surged in the past few years, achiev-
ing record sales since they were discontinued as main
music medium in 1993. Approximately six million
records were sold in the United States alone in 2013,
an increase of 33% from the previous year (Richter,
2014). However, the Nielsen Company indicated that
only 15% of the sales were logged, since most gramo-
phone records do not have a bar code which is used to
track sales (CMU, 2011). Besides an increase in sales
of new records, most recordings prior to the 1960s are
only available on gramophone. Efforts are made by
both commercial music labels and private audiophiles
to digitize these historic records. The digitization pro-
cess is a tedious and time consuming process, since
most records are damaged and need to be refurbished.
This paper examines twenty different interpola-
tion algorithms that are utilized for the digital restora-
tion of audio signals that are distorted by scratches
and other physical damage to the record. This re-
search is part of a larger project aimed at automating
the detection and reconstruction of noise on damaged
gramophone records, removing the burden of man-
ual labour. Although the research focuses on gramo-
phones, the algorithms can be directly applied to other
areas of audio signal processing, such as lost packets
in voice over IP (VoIP) or the poor reception in digi-
tal car radios. The methodology, test dataset and the
measurement of the reconstruction performance and
execution time used during the empirical analysis is
discussed. Finally, the algorithms are benchmarked
on music from eight different genres and the results
are presented in the last section.
2 ALGORITHMS
This section briefly discusses the theoretical back-
ground and mathematics of various interpolation al-
gorithms used to reconstruct gramophone audio sig-
nals. The algorithms are categorized into duplication
approaches, trigonometric methods, polynomials and
time series models.
2.1 Duplication Approaches
A simple method for reconstructing missing values is
to copy a series of samples from another source or
from somewhere else in the signal. Some duplica-
tion algorithms make use of equivalent sources to re-
31
Stallmann C. and Engelbrecht A..
Gramophone Noise Reconstruction - A Comparative Study of Interpolation Algorithms for Noise Reduction.
DOI: 10.5220/0005461500310038
In Proceedings of the 12th International Conference on Signal Processing and Multimedia Applications (SIGMAP-2015), pages 31-38
ISBN: 978-989-758-118-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

construct the audio, where at least one of the sources
is not subjected to noise (Sprechmann et al., 2013).
However, multiple copies are mostly not available
and copying samples from different parts of the same
source is a more practical solution. A smart copy-
ing algorithm was proposed, able to replicate a sim-
ilar fragment from the preceding or succeeding sam-
ples using an AR model with mixed excitation and
a Kalman filter (Nied
´
zwiecki and Cisowski, 2001).
This section discusses four duplication algorithms,
namely adjacent and mirroring window duplication,
followed by a nearest neighbour approach and simi-
larity interpolation.
2.1.1 Adjacent Window Interpolation
Adjacent window interpolation (AWI) reconstructs a
gap of size n at time delay t by simply copying the
preceding n samples from the signal y, that is,
y
t+i
= y
t−n+i
i ∈ {0, 1, .. . , n − 1} (1)
This approach relies on the idea that if a certain com-
bination of samples exists, there is a likelihood that
they might be repeated at a later stage. The interpola-
tion accuracy is improved by using bidirectional pro-
cessing and taking the average between the forward
and backward interpolation process.
2.1.2 Mirroring Window Interpolation
Volatile signals that are interpolated with AWI can
cause a sudden jump between sample y
t
and y
t−1
and
sample y
t+n−1
and y
t+n
, that is, where the gap of miss-
ing samples starts and ends respectively. By mirror-
ing the samples during mirroring window interpola-
tion (MWI), the signal is smoothed between the first
and last sample of the gap as follows:
y
t+i
= y
t−1−i
i ∈ {0, 1, . . . , n − 1} (2)
Similarly, the average between the forward and back-
ward mirrored windows increases the interpolation
accuracy.
2.1.3 Nearest Neighbour Interpolation
The nearest neighbour interpolation (NNI) recon-
structs a point by choosing the value of the closest
neighbouring point in the Euclidean space. NNI for a
sequential dataset at time delay t is defined as
y
t
=
t+k
∑
i=t−k
h(t − i4
t
)y
i
(3)
where k is the number of samples to consider at both
sides of y
t
, 4
t
the change in time, and h the rectangu-
lar function.
2.1.4 Similarity Interpolation
If the interpolation gap shares little characteris-
tics with the preceding and successive samples,
a duplication-based approach is inaccurate and is
improved using similarity interpolation (SI) which
searches for a sample sequence that is similar to the
samples on each side of the gap. This can be done by
constructing a set of vectors d
i
by calculating the de-
viation between the amplitudes of neighbouring sam-
ples in a moving window as follows:
d
i
= [(y
i
−
y
i+1
), (y
i+1
−
y
i+2
), . . . , (y
i+n−1
−
y
i+n
)] (4)
where y is the series of observed samples with a mov-
ing window size of n +1. The goal of similarity inter-
polation is to find the vector in d
i
that shares most of
its characteristics with the samples elsewhere in the
signal. Note that, by using the amplitude deviation,
the algorithm will not just find a sequence similar in
amplitude, but also sequences similar in direction and
gradient.
2.2 Trigonometric Approaches
Smoothing between two groups of samples can also
be achieved through trigonometric functions such as
the sine and cosine functions. This section examines
Lanczos and a cosine reconstruction approach.
2.2.1 Lanczos Interpolation
Lanczos interpolation (LI) is a smoothing interpola-
tion technique based on the sinc function (Duchon,
1979). The sinc function is the normalized sine func-
tion, that is,
sin(x)
x
(Gearhart and Shultz, 1990). The
LI is defined as
l(x) =
b
x
c
+n
∑
i=
b
x
c
−n+1
y
i
L(x − i) (5)
where
b
x
c
is the floor function of x, n the number of
samples to consider on both sides of x and L(x) the
Lanczos kernel. The Lanczos kernel is a dilated sinc
function used to window another sinc function as fol-
lows:
L(x) =
(
sinc(x)sinc(
x
n
) for − n < x < n
0 otherwise
(6)
2.2.2 Cosine Interpolation
A continuous trigonometric function like cosine can
be used to smoothly interpolate between two points.
Given a gap of n missing samples starting at time de-
lay t, the cosine interpolation (CI) is defined as
c(x) = y
t−1
(1 − h(x)) + y
t+n
h(x) (7)
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
32

where h(x) is calculated with cosine as follows:
h(x) =
1 − cos
π(x+1)
n+1
2
(8)
The cosine operation can be replaced with any other
smoothing function f (x), as long as f (0) = 1 and
f
0
(x) < 0 for x ∈ (0, 1). Alternatively, if the func-
tion has the properties f (0) = 0 and f
0
(x) > 0 for
x ∈ (0, 1), the points y
t−1
and y
t+n
in equation (7) have
to be swapped around.
2.3 Polynomials
A polynomial is a mathematical expression with a set
of variables and a set of corresponding coefficients.
This section discusses the standard, Fourier, Hermite
and Newton polynomials. Additionally, the standard
and Fourier polynomials are applied in an osculating
fashion and are utilized in spline interpolation.
2.3.1 Standard Polynomial
A standard polynomial (STP) is the sum of terms
where the variables only have non-negative integer
exponents and is expressed as
m
st p
(x) = α
d
x
d
+ ··· + α
1
x + α
0
=
d
∑
i=0
α
i
x
i
(9)
where x represent the variables, α
i
the coefficients,
and d the order of the polynomial. x represents the
time delay of the samples y in audio signals. Ac-
cording to the unisolvence theorem, a unique poly-
nomial of degree n or lower is guaranteed for n + 1
data points (Kastner et al., 2010). STP are typically
approximated using a linear least squares (LLS) fit.
2.3.2 Fourier Polynomial
Fourier proposed to model a complex partial differ-
entiable equation as a superposition of simpler oscil-
lating sine and cosine functions. A discrete Fourier
polynomial (FOP) is approximated with a finite sum
d of sine and cosine functions with a period of one as
follows:
m
f op
(x) =
α
0
2
+
d
∑
i=1
h
α
i
cos(iπx)+β
i
sin(iπx)
i
(10)
where α
i
and β
i
are the cosine and sine coefficients
respectively, approximated using LLS regression.
2.3.3 Newton Polynomial
Newton formulated a polynomial of least degree that
coincides at all points of a finite dataset (Newton and
Whiteside, 2008). Given n + 1 data points (x
i
, y
i
), the
Newton polynomial (NEP) is defined as
m
nep
(x) =
n
∑
i=0
α
i
h
i
(x) h
i
(x) =
i−1
∏
j=0
(x − x
i
) (11)
where α
i
are the coefficients and h
i
(x) is the i
th
New-
ton basis polynomial. An efficient method for calcu-
lating the coefficients is using a Newton divided dif-
ferences table.
2.3.4 Hermite Polynomial
Hermite introduced a polynomial closely related to
the Newton and Lagrange polynomials, but instead
of only calculating a polynomial for n + 1 points, the
derivatives at these points are also considered. The
Hermite polynomial (HEP) using the first derivative
is defined as
m
hep
(x) =
n
∑
i=0
h
i
(x) f (x
i
) +
n
∑
i=0
h
i
(x) f
0
(x
i
) (12)
where h
i
(x) and h
i
(x) are the first and second funda-
mental Hermite polynomials, calculated using
h
i
(x) =
1 − 2l
0
i
(x
i
)(x − x
i
)
[l
i
(x)]
2
(13)
h
i
(x) = (x − x
i
)[l
i
(x)]
2
(14)
l
i
(x) is the i
th
Lagrange basis polynomial and l
0
i
(x
i
)
the derivative of the Lagrange basis polynomial at
point x
i
. In the original publication, Hermite used La-
grange fundamental polynomials. However, the con-
cept of osculation can be applied to any polynomial
as long as the derivatives are known. This paper also
examines the osculating standard polynomial (OSP)
and the osculating Fourier polynomial (OFP).
2.3.5 Splines
Splines are a set of piecewise polynomials where the
derivatives at the endpoints of neighbouring polyno-
mials are equal. Given a set of n + 1 data points, n
number of splines are constructed, one between every
neighbouring sample pair. The splines are created as
follows:
m
s
(x) =
s
1
(x) for x
0
≤ x < x
1
.
.
.
s
n−1
(x) for x
n−2
≤ x < x
n−1
s
n
(x) for x
n−1
≤ x < x
n
(15)
To ensure a smooth connection between neighbouring
splines, the first derivatives at the interior data points
x
i
have to be continuous, that is, s
0
i
(x
i
) = s
0
i+1
(x
i
) for
i ∈ {1, 2, . . . , n} (Wals et al., 1962). As the order of the
GramophoneNoiseReconstruction-AComparativeStudyofInterpolationAlgorithmsforNoiseReduction
33

individual splines increases, higher order derivatives
also have to be continuous. The individual splines can
therefore be established using any other kind of poly-
nomial function whose derivatives are known, such as
standard polynomial splines (SPS) and Fourier poly-
nomial splines (FPS). In practice, cubic splines or
lower are mostly used, since higher degree splines
tend to overfit the model and reduce the approxima-
tion accuracy for intermediate points (Cho, 2007).
2.4 Time Series Models
This section provides an overview of some widely
used time series models. The autoregressive (AR),
moving average (MA), autoregressive moving av-
erage (ARMA), autoregressive integrated moving
average (ARIMA), autoregressive conditional het-
eroskedasticity (ARCH) and generalized autoregres-
sive conditional heteroskedasticity (GARCH) models
are discussed.
2.4.1 Autoregressive Model
The AR model is an infinite impulse response filter
that models a random process where the generated
output is linearly depended on the previous values in
the process. Since the model retains memory by keep-
ing track of the feedback, it can generate internal dy-
namics. In recent years a number of AR-based algo-
rithms for gramophone noise removal were proposed
which in general provide a good reconstruction accu-
racy (Nied
´
zwiecki et al., 2014a; 2014b; 2015) . Given
y
i
as a sequential series of n + 1 data points, the AR
model of degree p predicts the value of a point at time
delay t with the previous values of the series, defined
as
y
t
= c + ε
t
+
p
∑
i=1
α
i
y
t−i
(16)
where c is a constant, typically considered to be zero,
ε
t
a white noise error term, almost always considered
to be Gaussian white noise, and α
i
the coefficients of
the model. A common approach is to subtract the tem-
poral mean from time series y before feeding it into
the AR model. It was found that this approach is not
advisable with sample windows of short durations,
since the temporal mean is often not a true represen-
tation of the series’ mean and can vary greatly among
subsets of the series (Ding et al., 2000). The series y is
assumed to have a zero mean, whereas non-zero mean
series require an additional parameter α
0
at the front
of the summation in equation (16). The model coef-
ficients are typically solved using Yule-Walker equa-
tions with LLS regression.
2.4.2 Moving Average Model
The moving average is a finite impulse response filter
which continuously updates the average as the win-
dow of interest moves across the dataset. A study
on applying the moving average on random events
lead to the formulation of what later became known as
the MA model where univariate time series are mod-
elled with white noise terms (Slutzky, 1927). The MA
model predicts the value of a data point at time delay
t using
y
t
= µ + ε
t
+
q
∑
i=1
β
i
ε
t−i
(17)
where µ is the mean of the series, typically as-
sumed to be zero, β
i
the model coefficients of or-
der q and ε
t
, . . . , ε
t−q
the white noise error terms.
Since the lagged error terms ε are not observable,
the MA model can not be solved using linear regres-
sion. Maximum likelihood estimation (MLE) is typ-
ically used to solve the MA model, which in turn
is maximized through iterative non-linear optimiza-
tion methods such as the Broyden-Fletcher-Goldfarb-
Shanno (BFGS) (Broyden, 1970) or the Berndt-Hall-
Hall-Hausman (BHHH) (Berndt et al., 1974) algo-
rithms.
2.4.3 Autoregressive Moving Average Model
The ARMA model is a combination of the AR and
MA models. The ARMA model is based on Fourier
and Laurent series with statistical interference (Whit-
tle, 1951) and was later popularized by a proposal de-
scribing a method for determining the model orders
and an iterative method for estimating the model coef-
ficients (Box and Jenkins, 1970). The ARMA model
is given as
y
t
= c + ε
t
+
p
∑
i=1
α
i
y
t−i
+
q
∑
i=1
β
i
ε
t−i
(18)
where p and q are the AR and MA model orders re-
spectively. The ARMA coefficients are typically ap-
proximated through MLE using BFGS or BHHH.
2.4.4 Autoregressive Integrated Moving Average
Model
The ARIMA model is a generalization of the ARMA
model. ARIMA is preferred over the ARMA model
if the observed data shows characteristics of non-
stationarity, such as seasonality, trends and cycles
(Box and Jenkins, 1970). A differencing operation
is added as an initial step to the ARMA model to re-
move possible non-stationarity. The ARMA model in
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
34

equation (18) can also be expressed in terms of the lag
operator as
α(L)y
t
= β(L)ε
t
(19)
where α(L) and β(L) are said to be the lag polyno-
mials of the AR and MA models respectively. The
ARIMA model is expressed by expanding equation
(19) and incorporating the difference operator, y
t
−
y
t−1
= (1 − L)y
t
, as follows:
1 −
p
∑
i=1
α
i
L
i
!
(1 − L)
d
y
t
=
1 +
q
∑
i=1
β
i
L
i
!
ε
t
(20)
where p is the AR order, q the MA order and d the
order of integration. ARIMA coefficients are approx-
imated with the same method used by the ARMA
model.
2.4.5 Autoregressive Conditional
Heteroskedasticity Model
ARMA models are the conditional expectation of a
process with a conditional variance that stays con-
stant for past observations. Therefore, ARMA mod-
els use the same conditional variance, even if the lat-
est observations indicate a change in variation. The
ARCH model was developed for financial markets
with periods of low volatility followed by periods of
high volatility (Engle, 1982). ARCH achieves non-
constant conditional variance by calculating the vari-
ance of the current error term ε
t
as a function of the
error terms ε
t−i
in the previous i time periods. There-
fore, the forecasting is done on the error variance and
not directly on the previously observed values. The
ARCH process for a zero mean series is defined as
y
t
= σ
t
ε
t
σ
t
=
s
α
0
+
q
∑
i=1
α
i
ε
2
t−i
(21)
where ε
t
is Gaussian white noise and σ
t
is the con-
ditional variance, modelled by an AR process. Since
ARCH makes use of an AR process, the coefficients
can be estimated through LLS fitting using Yule-
Walker equations. However, since the distribution of
ε
2
t−i
is naturally not normal, the Yule-Walker approach
does not provide an accurate estimation for the model
coefficients, but can be used to set the initial values
for the coefficients. An iterative approach, such as
MLE, is then used to refine the coefficients in order to
find a more accurate approximation.
2.4.6 Generalized Autoregressive Conditional
Heteroskedasticity Model
The GARCH model is a generalization of the ARCH
model which also uses the weighted average of past
squared residuals without the declining weights ever
reaching zero (Bollerslev, 1986). Unlike the ARCH
model which employs an AR process, GARCH uses
an ARMA model for the error variance as follows:
σ
t
=
s
α
0
+
q
∑
i=1
α
i
ε
2
t−i
+
p
∑
i=1
β
i
σ
2
t−i
(22)
where α
i
and β
i
are the model coefficients and p and
q the GARCH and ARCH orders respectively. Since
GARCH makes use of the ARMA model for the error
variance, the model can not be estimated using LLS
regression, but has to follow the same estimation ap-
proach used by ARMA.
3 METHODOLOGY
This section discuses the optimal parameters of the
algorithms, the methodology applied during the anal-
ysis, the performance measurement used to compare
the algorithms and the evaluation of the execution
time.
3.1 Parameter Optimization
All algorithm parameters were optimized using frac-
tional factorial design (Fisher, 1935). Ten songs in
each genre were used to find the optimal parame-
ters. The parameter configurations that on average
performed best over all 80 songs were used to cal-
culate the reconstruction accuracy of the entire set of
800 songs. The optimal parameters of the benchmark-
ing are given below in the format [w,o,d], where w is
the windows size, o the order and d the derivatives.
• NNI: [2, -, -]
• SI: [284, -, -]
• STP: [2, 1, -]
• OSP: [6, 2, 1]
• SPS: [4, 1, -]
• FOP: [250, 1, -]
• OFP: [270, 10, 9]
• FPS: [2, 1, -]
• NEP: [2, -, -]
• HEP: [2, -, -]
• AR: [1456, 9, -]
• MA: [4, 1, -]
• ARMA: [1456, 9-2, -]
• ARIMA: [1440, 9-1-4, -]
• ARCH: [8, 1, -]
• GARCH: [8, 1-1, -]
3.2 Empirical Dataset
The dataset was divided into eight genres, namely
classical, country, electronic, jazz, metal, pop, reggae
and rock, consisting of 100 tracks each. The songs
were encoded in stereo with the Free Lossless Audio
Codec (FLAC) at a sample rate of 44.1 kHz and a
GramophoneNoiseReconstruction-AComparativeStudyofInterpolationAlgorithmsforNoiseReduction
35

sample size of 16 bits. Figure 1 shows typical distor-
tions in the sound wave caused by scratches on the
gramophone record. The duration of these disrup-
tions, which will be referred to as gap sizes, is typ-
ically 30 samples or shorter. To accommodate longer
distortions, gap sizes of up to 50 samples were anal-
ysed. Although the algorithms are able to reconstruct
a gap of any duration, disruptions longer than 50 sam-
ples rarely occur and were therefore omitted from the
results.
-1.0
-0.5
0.0
0.5
1.0
Amplitude
Time
-1.0
-0.5
0.0
0.5
1.0
Amplitude
Time
Figure 1: Disruptions caused by scratches on gramophones.
3.3 Reconstruction Performance
Each song was recorded in its original state without
any disruptions. The records were physically dam-
aged and rerecorded to generate the noisy signals. A
detailed discussion on the noise acquisition, detection
and noise masking processes is given in (Stallmann
and Engelbrecht, 2015a; 2015b) . The reconstructed
signal was compared to the original recording to de-
termine the quality of interpolation. The reconstruc-
tion performance was measured using the normalized
root mean squared error (NRMSE), defined as
NRMSE =
q
1
n
∑
n
i=1
(
˜
y
i
− y
i
)
2
ˆy − ˇy
(23)
for a set of n samples, where y
i
are the samples of
the original signal and ˜y
i
is the samples of the recon-
structed signal. ˆy and ˇy are the maximum and min-
imum amplitudes of the original signal respectively.
A perceptual evaluation of the audio quality was also
conducted,
3.4 Execution Time
In addition to the reconstruction accuracy, the algo-
rithms were also compared according to their execu-
tion time. The time was measured as the number of
seconds it takes to process a second of audio data,
denoted as s\s. Hence, a score of 1 s\s or lower
indicates that the algorithm can be executed in real
time. Based on the concept of the scoring metric in
(Sidiroglou-Douskos et al., 2011), in order to evalu-
ate the tradeoff between the reconstruction accuracy κ
and the execution time τ, the speed-accuracy-tradeoff
(SAT) is calculated using
SAT =
κ
ˆ
κ −
ˇ
κ
+
τ
ˆ
τ −
ˇ
τ
−1
(24)
ˆ
κ and
ˇ
κ are the NRMSEs of the best and worst per-
forming algorithms respectively.
ˆ
τ and
ˇ
τ are the com-
putational times of the fastest and slowest algorithms
respectively. Benchmarking was conducted on a sin-
gle thread using an Intel Core i7 2600 at 3.4 GHz ma-
chine with 16 GB memory.
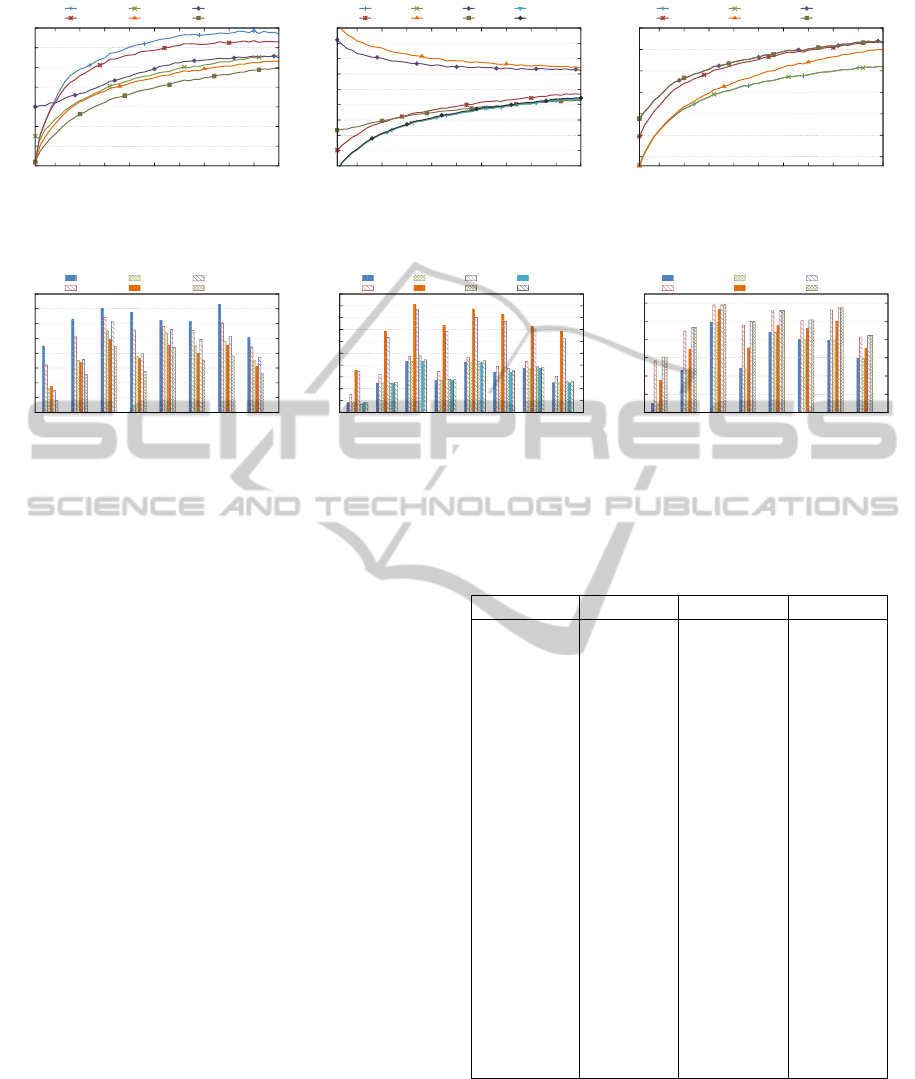
4 EMPIRICAL RESULTS
Figure 2 shows the reconstruction accuracy of the du-
plication and trigonometric interpolation approaches
for an increasing gap size. AWI and MWI achieved
a good interpolation for small gap sizes, but quickly
declined as the gap increased. LI struggled to re-
construct small gaps, but still outperformed AWI and
MWI for gaps of five samples and larger. CI had
the best accomplishment for gaps of two samples and
greater. The reconstruction performance of the algo-
rithms in figure 2 for different genres is given in figure
3. CI and AWI achieved the best and worst results re-
spectively for all genres. NNI and SI outperformed LI
in all genres, except classical music.
Figure 4 illustrates the interpolation NRMSE for
the examined polynomials over an increasing gap
size. The STP, SPS, NEP and HEP achieved almost
identical results. Since the best performing spline in-
terpolation utilizes linear piecewise polynomials, the
interpolation accuracy of the STP and SPS are equiv-
alent. The STP does not benefit when employed in
an osculating fashion. However, the FOP improved
with the inclusion of derivatives and clearly benefited
when applied as splines. An opposite trend is ob-
served for the FOP and OFP, where smaller gaps were
more difficult to interpolate than larger gaps. This
trend is caused by a high frequency FOP fitted over
smaller gaps. As the gap size increases, the frequency
of the sine and cosine waves decreases, providing a
smoother interpolation. Figure 5 shows the polynomi-
als’ interpolation performance for the different gen-
res. FOP and OFP had a clear inflation compared
to the other algorithms. OSP also had a slight surge,
with the rest of the algorithms achieving a similar in-
terpolation over all genres.
The time series models’ interpolation perfor-
mance for a growing duration is illustrated in figure
6. The AR and ARMA models had a similar per-
formance, whereas the ARIMA model started devi-
ating from the trend with gaps wider than eight sam-
ples. The ARCH and GARCH models had an iden-
tical trend, indicating that there is no difference be-
tween using and AR or ARMA process to predicting
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
36
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
5 10 15 20 25 30 35 40 45 50
NRMSE
Gap Size (Samples)
AWI
MWI
NNI
SI
LI
CI
Figure 2: The reconstruction of duplica-
tion methods for different gap sizes.
0.03
0.05
0.07
0.09
0.11
0.13
0.15
0.17
0.19
0.21
5 10 15 20 25 30 35 40 45 50
NRMSE
Gap Size (Samples)
STP
OSP
SPS
FOP
OFP
FPS
NEP
HEP
Figure 4: The reconstruction of polyno-
mials for different gap sizes.
0.02
0.04
0.06
0.08
0.10
0.12
0.14
5 10 15 20 25 30 35 40 45 50
NRMSE
Gap Size (Samples)
AR
MA
ARMA
ARIMA
ARCH
GARCH
Figure 6: The reconstruction of time se-
ries models for different gap sizes.
0.05
0.06
0.07
0.08
0.09
0.10
0.11
0.12
0.13
Classical
Country
Electro
Jazz
Metal
Pop
Reggae
Rock
NRMSE
Genre
AWI
MWI
NNI
SI
LI
CI
Figure 3: The reconstruction of duplica-
tion methods for different genres.
0.05
0.06
0.07
0.08
0.09
0.10
0.11
0.12
0.13
0.14
0.15
Classical
Country
Electro
Jazz
Metal
Pop
Reggae
Rock
NRMSE
Genre
STP
OSP
SPS
FOP
OFP
FPS
NEP
HEP
Figure 5: The reconstruction of the
polynomials for different genres.
0.04
0.05
0.06
0.07
0.08
0.09
0.10
Classical
Country
Electro
Jazz
Metal
Pop
Reggae
Rock
NRMSE
Genre
AR
MA
ARMA
ARIMA
ARCH
GARCH
Figure 7: The reconstruction of the time
series models for different genres.
a music signal’s variance. On average a music sig-
nal’s variance is comparatively low compared to high
volatile financial markets for which the ARCH and
GARCH models were originally intended and there-
fore do not perform as well as the AR and ARMA
models. The corresponding genre comparison for the
models in figure 6 is given in figure 7. The AR and
ARMA models performed best for all genres, fol-
lowed by the ARIMA, MA and then the ARCH and
GARCH models. Table 1 shows the overall recon-
struction accuracy, execution time and the tradeoff be-
tween the accuracy and computational time calculated
using equation (24). The ARMA model performed
the best on average, with just a minor improvement
over the AR model. All algorithms, except the OFP
and ARIMA model, can be executed in real time us-
ing a single thread. CI was on average the fastest. The
tradeoff in the last column shows that the AR model
achieved the most effective results for the given exe-
cution time. Although not a major improvement over
the ARMA model, the AR had a considerable lower
computation time, since it was estimated with a LLS
fit and not an iterative gradient-based algorithm.
The reconstruction process was also perceptually
evaluated. The refurbished songs had a pleasant lis-
tening experience with little noise in the background,
mostly restricted to the song segments with a narrow
dynamic range, such as rests which are prominent in
classical music. Due to the subjective nature, differ-
ent hearing ranges and the participants’ difficulties to
distinguishing between the interpolation of some al-
Table 1: The average reconstruction accuracy, execution
time and tradeoff for the interpolation algorithms.
Algorithm NRMSE Time (s\s) SAT
AWI 0.111371 0.049794 1.098892
MWI 0.104806 0.051691 1.167703
NNI 0.090748 0.027313 1.348714
SI 0.087269 0.054413 1.402265
LI 0.093215 0.027908 1.313032
CI 0.081218 0.027128 1.506959
STP 0.080057 0.031490 1.528750
OSP 0.086014 0.034523 1.422878
SPS 0.080057 0.038588 1.528683
FOP 0.122412 0.068523 0.999724
OFP 0.117923 5.325502 1.015416
FPS 0.081493 0.033035 1.501807
NEP 0.080058 0.027329 1.528749
HEP 0.081066 0.027557 1.509767
AR 0.071764 0.092778 1.704671
MA 0.087952 0.029541 1.391575
ARMA 0.071709 2.435243 1.678909
ARIMA 0.080201 6.808781 1.464877
ARCH 0.089057 0.062245 1.374061
GARCH 0.089057 0.062378 1.374060
gorithms, the NRMSE was used as the principal mea-
surement of the reconstruction accuracy.
5 CONCLUSION
Twenty interpolation algorithms were analysed and
GramophoneNoiseReconstruction-AComparativeStudyofInterpolationAlgorithmsforNoiseReduction
37

benchmarked against each other in order to determine
their reconstruction ability on disrupted gramophone
recordings. Different approaches to interpolation
were considered, including duplication and trigono-
metric methods, polynomials and time series mod-
els. It was found that the ARMA model performed
the best with an average NRMSE of 0.0717. The CI
had the fastest execution time at 0.0271 s\s. The AR
model was the most effective approach by achieving
the best interpolation for a given time limit.
Future work includes the analyses of more com-
plex models, such as neural networks, that may in-
crease the interpolation accuracy. Further research
has to be done in other areas of audio processing, such
as VoIP, in order to determine how well the examined
algorithms perform with other types of noise and dif-
ferent audio sources, such as speech instead of music.
REFERENCES
Berndt, E. K., Hall, B. H., Hall, R. E., and Hausman, J. A.
(1974). Estimation and Inference in Nonlinear Struc-
tural Models. In Annals of Economic and Social Mea-
surement, volume 3, pages 653–665.
Bollerslev, T. (1986). Generalized Autoregressive Condi-
tional Heteroskedasticity. Journal of Econometrics,
31(3):307–327.
Box, G. E. P. and Jenkins, G. M. (1970). Time Series Anal-
ysis: Forecasting and Control. Holden-Day Series in
Time Series Analysis. San Francisco, CA.
Broyden, C. G. (1970). The Convergence of a Class of
Double-rank Minimization Algorithms. IMA Journal
of Applied Mathematics, 6(1):76–90.
Cho, J. (2007). Optimal Design in Regression and Spline
Smoothing. PhD thesis, Queen’s University, Canada.
CMU (2011). SoundScan may be under reporting US vinyl
sales. www.thecmuwebsite.com/article/soundscan-
may-be-under-reporting-us-vinyl-sales. 2015-04-16.
Ding, M., Bressler, S., Yang, W., and Liang, H. (2000).
Short-window Spectral Analysis of Cortical Event-
related Potentials by Adaptive Multivariate Autore-
gressive Modeling. Biological Cybernetics, 83:35–45.
Duchon, C. E. (1979). Lanczos Filtering in One and
Two Dimensions. Journal of Applied Meteorology,
18(8):1016–1022.
Engle, R. F. (1982). Autoregressive Conditional Het-
eroscedasticity with Estimates of the Variance of
United Kingdom Inflation. Econometrica, 50(4):987–
1007.
Fisher, R. A. (1935). The Design of Experiments. Oliver
and Boyd, Edinburgh, United Kingdom.
Gearhart, W. B. and Shultz, H. S. (1990). The Function sin
x/x. The College Mathematics Journal, 21(2):90–99.
Kastner, R., Hosangadi, A., and Fallah, F. (2010). Arith-
metic Optimization Techniques for Hardware and
Software Design. Cambridge, United Kingdom.
Newton, I. and Whiteside, D. T. (2008). The Mathematical
Papers of Isaac Newton, volume 1 of The Mathemati-
cal Papers of Sir Isaac Newton.
Nied
´
zwiecki, M. and Ciołek, M. (2014a). Elimination of
Impulsive Disturbances from Stereo Audio Record-
ings. In European Signal Processing Conference,
pages 66–70.
Nied
´
zwiecki, M. and Ciołek, M. (2014b). Localization of
Impulsive Disturbances in Archive Audio Signals us-
ing Predictive Matched Filtering. In IEEE Interna-
tional Conference on Acoustics, Speech and Signal
Processing, pages 2888–2892.
Nied
´
zwiecki, M., Ciołek, M., and Cisowski, K. (2015).
Elimination of Impulsive Disturbances From Stereo
Audio Recordings Using Vector Autoregressive
Modeling and Variable-order Kalman Filtering.
IEEE/ACM Transactions on Audio, Speech, and Lan-
guage Processing, 23(6):970–981.
Nied
´
zwiecki, M. and Cisowski, K. (2001). Smart Copy-
ing - A New Approach to Reconstruction of Audio
Signals. IEEE Transactions on Signal Processing,
49(10):2272–2282.
Richter, F. (2014). The LP is Back! www.statista.com
/chart/1465/vinyl-lp-sales-in-the-us. 2015-04-16.
Sidiroglou-Douskos, S., Misailovic, S., Hoffmann, H., and
Rinard, M. (2011). Managing Performance vs Accu-
racy Trade-offs with Loop Perforation. In ACM SIG-
SOFT Symposium, pages 124–134. ACM.
Slutzky, E. (1927). The Summation of Random Causes
as the Source of Cyclic Processes. Econometrica,
5(2):105–146.
Sprechmann, P., Bronstein, A. M., Morel, J.-M., and Sapiro,
G. (2013). Audio Restoration from Multiple Copies.
In International Conference on Acoustics, Speech and
Signal Processing, pages 878–882.
Stallmann, C. F. and Engelbrecht, A. P. (2015a). Digi-
tal Noise Detection in Gramophone Recordings. In
ACM International Conference on Multimedia, Bris-
bane, Australia. In review.
Stallmann, C. F. and Engelbrecht, A. P. (2015b). Gramo-
phone Noise Detection and Reconstruction Using
Time Delay Artificial Neural Networks. IEEE Trans-
actions on Systems, Man, and Cybernetics. In review.
Wals, J. L., Ahlberg, J., and Nilsson, E. N. (1962). Best
Approximation Properties of the Spline Fit. Journal
of Applied Mathematics and Mechanics, 11:225–234.
Whittle, P. (1951). Hypothesis Testing in Time Series Analy-
sis. PhD thesis, Uppsala University, Uppsala, Sweden.
Wile, R. R. (1990). Etching the Human Voice: The
Berliner Invention of the Gramophone. Association
for Recorded Sound Collections Journal, 21(1):2–22.
SIGMAP2015-InternationalConferenceonSignalProcessingandMultimediaApplications
38
