
Modeling of Nonlinear Dynamics of Active Components in Intelligent
Electric Power Systems
Konstantin Suslov
1
, Svetlana Solodusha
2
and Dmitry Gerasimov
1
1
Irkutsk State Technical Uuniversity, 83, Lermontov str., Irkutsk, Russia
2
Energy Systems Institute SB RAS, 130, Lermontov str., Irkutsk, Russia
Keywords: Smart Grid, Volterra Polynomials, Power Quality, Control Systems, Electric Power Systems.
Abstract: The research is aimed at developing algorithms for the construction of automated systems to control active
components of the electrical network. The construction of automated systems intended for the control of
electric power systems requires high-speed mathematical tools. The method applied in the research to describe
the object of control is based on the universal approach to the mathematical modelling of nonlinear dynamic
system of a black-box type represented by the Volterra polynomials of the N-th degree. This makes it possible
for the input and output characteristics of the object to obtain an adequate and fast mathematical description.
Results of the computational experiment demonstrate the applicability of the mathematical tool to the control
of active components of the intelligent power system.
1 INTRODUCTION
One of the main directions in power engineering is
the adoption of components applicable to the
implementation of a smart grid concept. This
requires:
• Transmission lines with variable characteristics
(active and reactive impedance components);
• Devices for electromagnetic conversion of energy
with wide capabilities to adjust parameters;
• Systems of energy storage and accumulation;
• Switching devices with a high breaking capacity
and large commutation life;
• Executive mechanisms that make it possible to act
on the active network components on-line by
changing the network parameters and topology.
An integral part of modern power system is
positioned sensors and current state variables in the
amount sufficient for the on-line estimation of the
network state in normal, emergency and post-
emergency conditions.
Therefore, the objective is to create control
systems which operate in real time and allow fast
generation of control signals to all active network
components in order to generate optimal control
actions.
This method of control is only possible if new
algorithms and techniques of power system control
are implemented, in particular when the methodology
on selection of input vectors that characterize
operating conditions of power systems in terms of
system topology are developed.
2 STATEMENT OF THE
PROBLEM
In order to estimate the objective current state it is
necessary to take into account the parameters
characterizing power quality.
The application of appropriate mathematical tools
will make it possible to solve the stated problem.
These mathematical tools should meet the
following requirements:
• appropriately reflect the object of control in the
entire range of change in its characteristics;
• afford the possibility of obtaining an adequate
mathematical description based on real
characteristics of the object;
• have high performance in its technical
implementation.
Generally speaking, the analysis of dynamic
characteristics of wind power unit is based on the
methods using differential equations. Most of the
researches are devoted to the specification of
characteristics of individual components of wind
turbine (Li, 2011, He, 2009), specification of various
195
Suslov K., Solodusha S. and Gerasimov D..
Modeling of Nonlinear Dynamics of Active Components in Intelligent Electric Power Systems.
DOI: 10.5220/0005411801950200
In Proceedings of the 4th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS-2015), pages 195-200
ISBN: 978-989-758-105-2
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

coefficients (Manyonge, 2012) or consideration of a
mechanical part of the turbine as a n-mass system
(Bhandari, 2014). In practice, the initial data are
known with some error. In this case, as a rule,
solutions to the inverse problem turn out to be
unstable with respect to an error in the initial data.
Therefore, to construct stable methods we use the
theory of ill-posed problems. (Kabanikhin, 2011).
It is also obvious that these mathematical tools are
difficult to use in the microprocessor software which
in turn makes it difficult to perform control.
The goal of this research is to test the algorithms
for the construction of computer-aided systems for
power system control, in which the mathematical
models are used in the form of integral Volterra
polynomials.
We will name only some of the research areas, in
which the Volterra integral power series find their
use. These are: modelling of technical systems
(Venikov and Sukhanov, 1982, Pupkov, 1976) and
electronic devices (Stegmayeer, 2004), nonlinear
identification of communications channels (Tong
Zhou and Giannakis, 1997, Cheng and Powers, 1998)
and visualization systems (Lin and Unbehauen,
1992), analysis of non-stationary time series (Minu
and Jessy, 2012), and description of automatic
feedback control systems (Belbas and Bulka, 2011).
Nowadays there are many methods for the
determination of dynamic characteristics, and the
universality of this mathematical apparatus makes it
possible to create the software for doing experiments
on computer. In particular, the Voltaire XL package
(American company Applied Wave Research) has
shown its performance in describing the electronic
scheme by the finite sums of the Volterra series.
An isolated electrical energy source represented
by a horizontal-axis wind turbine was used as a real
physical object (Solodusha, 2014).
3 REFERENCE DYNAMIC
SYSTEM
It should be noted that renewable energy sources are
an active component of modern electric power
systems. As a reference dynamic system, we will
consider a mathematical model of horizontal-axis
wind turbine represented using the techniques (Pronin
and Martyanov, 2012, Perdana, 2004, Sedaghat and
Mirhosseini, 2012)
in the following form:
1
3
1 0.035
()= ,
( ) 0.08 ( )
() 1
zt
Zt bt
bt
−
−
+
+
(1)
116 12.5
( ) = 0.22 0.4 ( ) 5 exp ,
() ()
p
Ct bt
zt zt
−+ −
(2)
()
()= ,
()
T
tR
Zt
Vt
ω
3
() ()
()=
2()
p
T
T
SC t V t
Mt
t
ρ
ω
, (3)
() ()
=,
TC
T
M
tMt
d
dt J
ω
−
(4)
where
T
ω
(rad/s) is rotational speed of wind turbine
elements,
T
M
(N·m) is torque created by
aerodynamic force,
C
M
(N·m) is load resistance
torque,
J
(kg·m
2
) is moment of inertia of the wind
turbine rotating parts,
ρ
(kg·m
2
) is air density,
S
(m
2
) is blade – swept area,
R
(m) is wind wheel
radius,
b
(deg) is blade lean angle,
V
(m/s) is wind
speed; dimensionless magnitudes:
p
C is wind
energy efficiency,
Z
is speed, z is current value of
speed.
One of the key tasks is to reduce the dynamic
loads on the structure during strong winds. Control of
blade turning makes it possible to considerably
decrease the load on the structure. The research is
aimed at studying the impact of the blade lean angle
b
and wind speed
V
on the angular velocity of
rotation
T
ω
.
4 INTEGRAL MODELS
The mathematical model of the input-output type
system can be represented by the Volterra polynomial
of the
N -th degree:
() ()
1
1
11
n
n
N
ii
niip
yt f t
,...,
=≤≤...≤≤
=,
(5)
()
1 n
ii
f
t
,...,
=
()()
1
,, 1
1
00
nm
tt
n
ii n i m m
m
Kss xtsds
...
=
= ... ,..., −
∏
, (6)
where
[
]
0tT∈, ,
(1)
[0, ]
(0) 0, ( )
T
yytC=∈.
To construct an integral model in the form (5), (6)
means to restore multidimensional transient
characteristics of the nonlinear dynamic system
1
,,
n
ii
K
...
. Currently, there are quite many methods
developed to determine the dynamic characteristics
SMARTGREENS2015-4thInternationalConferenceonSmartCitiesandGreenICTSystems
196
(Doyle and Pearson, 2002, Rugh, 1981). The most
widely used approach is presented in (Danilov, 1990).
It suggests setting a multiparametric family of test
signals consisting of a combination of Dirac delta
functions to recover the Volterra kernels. However,
such an approach has limited application (Ljung,
1987).
The technique for the identification of (5), (6)
(Apartsyn, 2003, 2000, 2013) which is used in the
paper is based on setting a group of test signals
represented by special linear combinations of
Heaviside functions with deviating argument. Here
the problem of identification is reduced to solving the
Volterra linear integral equations of the first kind,
which allow explicit inversion formulas.
Further in (5), we will consider only the case
where
=2N
, which is the most important for
applications. The Volterra kernels will be identified
by the technique (Apartsyn, 2003, 2000, 2013), using
the midpoint rule to numerically solve (5), (6).
The numerical procedure for solving the system
(1) - (4) will be considered as a reference for the
assessment of the integral model accuracy. To
approximately solve (1) - (4) we apply the 4-th order
Runge-Kutta method.
The integral models are constructed to describe
the nonlinear dynamics of the output signal
0
() ()
TTT
tt
ωωω
Δ= −in the case of scalar input
signal
()btΔ (or ()VtΔ ).
Below consideration is given to the case for the
input signal
()btΔ . Practical identification of
transient characteristics in the model
11111
0
() ( ) ( )
t
y
tKsbtsds=Δ−+
11 1 2 1 2 1 2
00
(, ) ( ) ( )
tt
K
ss bt s bt sdsds+Δ−Δ−
(7)
was carried out on the basis of the experimental data
for the test disturbance signals
() (() ( )),b t et et
α
ω
αω
Δ= −− () 0VtΔ=,
where
10
α
=± , 020t
ω
≤≤≤ (s), ()et –
Heaviside function:
0, 0;
()
1, 0.
t
et
t
<
=
≥
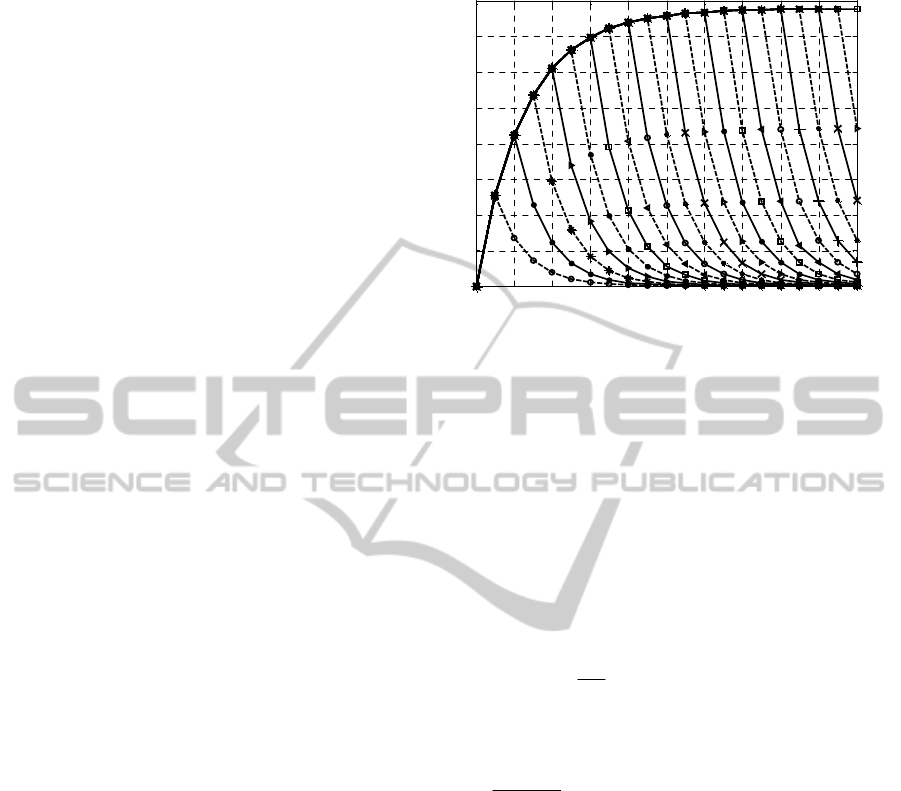
Figure 1 presents the outputs of the reference
model (1)-(4) to the input disturbances
1
(, ) 10( () ( ))bt et et
ωω
Δ=−−−.
Figure 1: Experimental outputs.
1
(, )
b
y
t
ω
.
The outputs
1
(, )
b
yt
ω
of the reference model (1)-
(4) took part in the recovery procedure of the sought
transient characteristics of the system in the scalar
model (7).
It should be specified that the recovery of kernels
1
()Kt,
11
(, )Ktt
ω
− in (7) as a result of the
application of the approach (Apartsyn, 2003, 2000,
2013) can be reduced to solving special Volterra
linear integral equations of the first kind. Search for
the difference analog to the kernels
1
()Kt,
11
(, )Ktt
ω
− was carried out on a uniform grid
,
i
tih= 1,in= , nh T= . The total number of the
unknowns taking part in the experiment of
constructing one model of form (7) was equal to
(1)
2
nn
n
+
+
.
Along with the scalar model of form (7) we have
developed and implemented an algorithm for the
construction of the quadratic Volterra polynomial
2
2111
1
0
() ( ) ( )
t
ii
i
yt Ksxt sds
=
=−+
2
12 1 2 12
1
00
(, )( )( )
tt
ii i i
i
Kssxtsxtsdsds
=
+−−+
12121 1 2 2 12
00
(, )( ) ( )
tt
Kssxtsxtsdsds+−−
(8)
For the case of vector input
12
() ( (), ())
x
txtxt= ,
where
1
() (),
x
tbt=Δ
2
() ()
x
tVt=Δ .
0 2 4 6 8 10 12 14 16 18 20
0
2
4
6
8
10
12
14
16
Δ
ω
T
(t)
t
ModelingofNonlinearDynamicsofActiveComponentsinIntelligentElectricPowerSystems
197
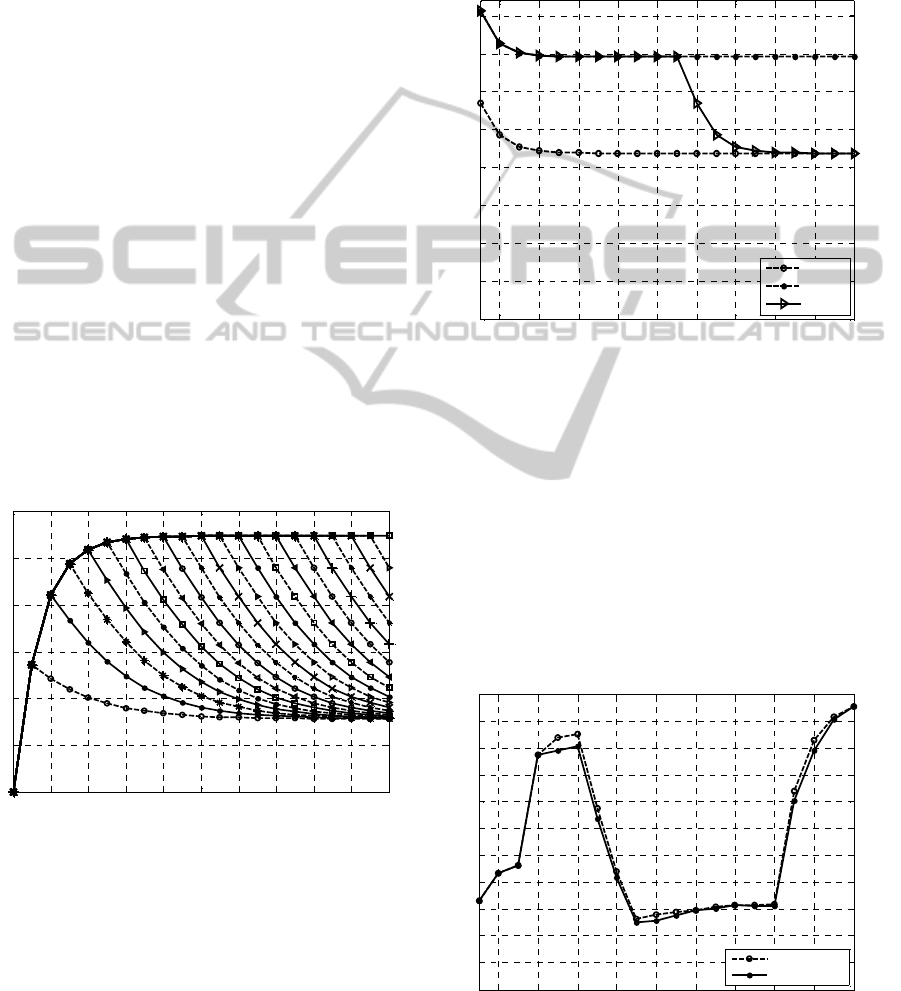
Figure 2 presents the output
11
(, )
bV
yt
ω
of the
reference model (1)-(4) to the input disturbance of
form
1
1
1
2
(, ) 10( () ( )),
() 5(),
b
V
x t et et
xt et
ωω
=− − −
=
which was used in the recovery of the kernel
12
K
from the integral model (8).
The total number of the unknowns participating in
the experiment of constructing one model of form (8),
was equal to
2
2(1)nnn n+++.
5 CASE STUDY
The computational experiment consists of two stages.
In the first stage we build the integral models of form
(7), (8) by solving the problem of the identification of
transient characteristics of a dynamic system. In the
second stage we consider the problem of determining
the control action
1
() ()
x
tbt≡Δ , that maintains the
output signal
()
T
t
ω
Δ
at a set level
*
ω
. Considering
the transient characteristics
1
,,
n
ii
K
...
and output
()yt
in (7), (8) to be known, we determine the input signal
()
x
t
which corresponds to the specified output ()yt .
Figure 2: Experimental outputs.
1
(, )
b
y
t
ω
.
In this section we present the results
demonstrating the first of the indicated stages of the
mathematical modeling. To ensure better accuracy,
the amplitude
α
of test signals used to determine the
Volterra kernels in (7), (8) was aligned with the
magnitude of the acting disturbances. It should be
noted that the model built using only one group of
signals cannot be considered equally suitable for the
calculation in the entire range of admissible changes
in the input signals. In order to improve the accuracy
of modeling we introduced reference initial
conditions for which the models of form (7) were
constructed. The calculations were performed on the
uniform grid with a step
=1h
(s).
Figure 3: Application of two integral models calculated
using (7). Notations: “model 1”, “model 2” are responses of
integral models for the reference integral model conditions
0
8V =
(m/s),
0
10V =
(m/s), respectively, “standard” –a
response of the standard model (1) - (4).
Figure 3 illustrates the application of the quadratic
Volterra polynomial (7) to forecast the output to the
input signals:
( ) 10( ( ) ( 11)) 8( ( 11)V t et et etΔ= −−+ −−
(20)),et−− () 10(),bt etΔ= [0,20]t ∈ ,
for
0
10b = (deg),
0
8V = (m/s),
0
10V = (m/s).
Figure 4: Comparison of the application of the integral
model of form (8) and the standard model (1)-(4).
0 2 4 6 8 10 12 14 16 18 20
0
10
20
30
40
50
60
Δ
ω
T
(t)
t
2 4 6 8 10 12 14 16 18 20
0
5
10
15
20
25
30
35
40
ω
T
(t)
t
model 1
model 2
standart
2 4 6 8 10 12 14 16 18 20
0
5
10
15
20
25
30
35
40
45
50
55
ω
T
(t)
t
integral model
standart model
SMARTGREENS2015-4thInternationalConferenceonSmartCitiesandGreenICTSystems
198
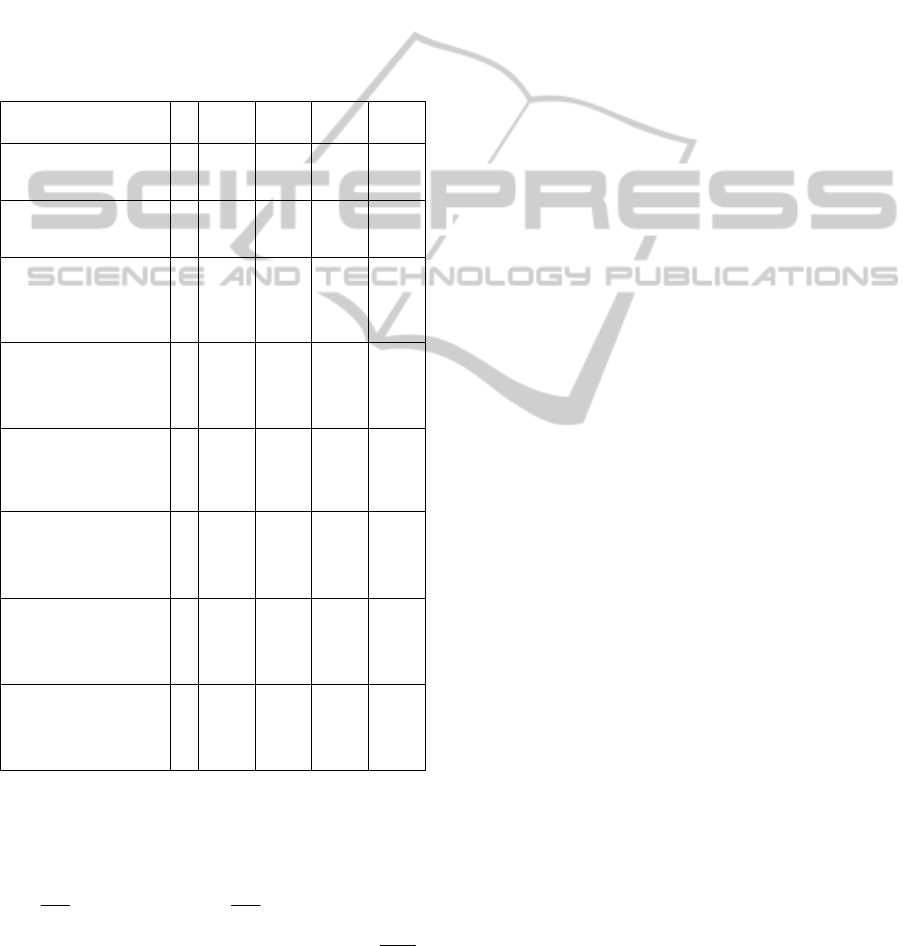
Figure 4 illustrates the result of modeling the
output of the system
()
T
t
ω
Δ to the input signals:
( ) 5( ( 3) ( 6)) 5( ( 6)V t et et etΔ= −−−− −−
( 16)),et−−
() 20(() ( 8))bt et etΔ = −−+
10( ( 8) ( 11)) 10( ( 16)et et et+−−−+−−
( 20))et−−
, [0,20]t ∈ ,
for
0
20b = (deg),
0
5V = (m/s) using the integral
model (8). The maximum relative error in
computations made up 4.4%.
Table 1 presents relative and absolute errors.
Table 1: Relative and absolute errors.
Examples of the
input signals
1
ε
2
ε
3
ε
4
ε
() 10(),bt etΔ=−
() 5()Vt etΔ=
0.00 0.000 0.00 0.00
() 20(),bt etΔ=−
() 10()Vt etΔ=
0.00 0.000 0.00 0.00
() 10(),bt etΔ=−
() 5(()Vt etΔ= −
(3))et−−
1.47 0.004 6.26 0.02
() 10( ()bt etΔ=− −
(1))et−−
,
() 5()Vt etΔ=
1.17 0.003 4.98 0.01
() 10(),bt etΔ=−
() 5(()Vt etΔ= −
( 12))et−−
1.89 0.068 8.04 0.29
() 20( ()bt etΔ=− −
(11))et−−
,
() 10()Vt etΔ=
1.39 0.102 5.91 0.43
() 20( ()bt etΔ=− −
(4))et−−
,
() 10()Vt etΔ=
1.28 0.006 5.45 0.03
() 20(),bt etΔ=−
( ) 10( ( )Vt etΔ= −
(1))et−−
1.29 0.007 5.49 0.03
The notations used in Table 1:
12
1
max | ( ) ( ) |
Ti i
iT
tyt
εω
≤≤
=Δ −
(rad/s),
22
|()()|
T
TyT
εω
=Δ −
(rad/s),
0
1
3
100%
T
ε
ε
ω
=⋅
(in %),
0
2
4
100%
T
ε
ε
ω
=⋅
(in %),
0
20b = (deg),
0
5V = (m/s), ,
i
tih=⋅
1, 20i =
,
0
23.5
T
ω
=
(rad/s), 1h = (s), 20T = (s).
The calculations show that the constructed
integral models describe the physical process with
admissible accuracy.
For solving (8) with respect to the control action
1
()
x
bt≡Δ
we use the algorithms developed in
(Solodusha, 2009). The study employs stable
difference methods in which a grid step is used as a
regularization parameter (Apartsyn, 2003). As
applied to the problem of automatic control it is
planned to compare the techniques for the
identification of Volterra polynomials of form (8)
which are based on the introduction of special classes
of piecewise constant test input signals. The analysis
of the studied approaches will allow us to identify the
preferable ranges for one or another algorithm, for the
reference model (1) - (4).
6 CONCLUSIONS
The presented results of the mathematical modeling
using the finite interval of the integro-power Volterra
series were for the first time applied to describe the
dynamics of the horizontal-axis wind turbine.
The technique was developed to construct the
integral model and technically implement the high-
speed system of control. A computational experiment
aimed at constructing the integral models of the wind
power unit was done.
The results of the computational experiment
demonstrates the applicability of this mathematical
tool to the control of active components of the electric
power system.
To improve the accuracy of modeling, it is
planned to introduce a structure with switchable
kernels, which will envisage the adaptive behavior of
the model in the case the input signal amplitudes go
beyond some limited interval.
The computer modeling was carried out using the
author’s software created in Matlab.
Further it is planned to apply this approach to the
research into complex dynamic systems which
contain an arbitrarily large amount of components of
the active-adaptive isolated system.
ACKNOWLEDGEMENTS
The research was partly funded by the grant of the
Russian Foundation of Basic Research, project
No.15-01-01425a.
ModelingofNonlinearDynamicsofActiveComponentsinIntelligentElectricPowerSystems
199

REFERENCES
He, Z., Xu Jianyuan, X., Xiaoyu, W., 2009. The dynamic
characteristics numerical simulation of the wind turbine
generators tower based on the turbulence model. In 4th
IEEE Conference on Industrial Electronics and
Applications. ICIEA 2009.
Li, J., Chen, J., Chen, X., 2011. Dynamic Characteristics
Analysis of the Offshore Wind Turbine Blades. Journal
Marine Sci. Vol.10, pp. 82-87.
Manyonge, A.W., Ochieng, R.M., Onyango, F.N.,
Shichikha, J.M., 2012. Mathematical Modelling of
Wind Turbine in a Wind Energy Conversion System:
Power Coefficient Analysis. Applied Mathematical
Sciences. Vol.6. No. 91, pp. 4527-4536.
Bhandari, B., Poudel, S.R., Lee, K.T., Ahn, S.Н., 2014.
Mathematical Modeling of Hybrid Renewable Energy
System: A Review on Small Hydro-Solar-Wind Power
Generation. International Journal of Precision
Engineering and Manufacturing-Green Technology.
Vol.1, No.2, pp.157-173.
Kabanikhin, S.I., 2011. Inverse and Ill-posed problems.
Theory and applications. Germany: De Gruyter,
Venikov, V.A., Sukhanov, O.A., 1982. Cybernetic models
of electric power systems. Moscow: Energoizdat, p.327
(in Russian).
Pupkov, K.A., Kapalin, V.I., Yushenko, A.S., 1976.
Functional Series in the Theory of Non-Linear Systems,
Moscow: Nauka. (in Russian).
Stegmayeer, G., 2004. Volterra series and neural networks
to model an electronic device nonlinear behaviour. In
IEEE International Conference on Neural Networks. V.
4, pp. 2907-2910.
Tong Zhou, G., Giannakis, G.B. 1997. Nonlinear channel
identification and performance analysis ,with PSK
inputs. In IEEE Signal Processing Workshop on Signal
Processing Advances in Wireless Communications, pp.
337-340.
Cheng, C.H., Powers, E.J., 1998. Fifth-order Volterra
kernel estimation for a nonlinear communication
channel with PSK and QAM inputs. In IEEE Signal
Processing Workshop on Statistical Signal and Array
Processing, pp. 435-438.
Lin, J.N., Unbehauen, R., 1992. 2-D adaptive Volterra filter
for 2-D nonlinear chanel equalization and image
restoration. Electronics Lett. No. 28(2). pp. 180-182.
Minu, K.K., Jessy, J. C., 2012. Volterra Kernel
Identification by Wavelet Networks and its
Applications to Nonlinear Nonstationary Time Series,
Journal of Information and Data Management. No. 1,
pp. 4-9.
Belbas, S.A., Bulka, Yu., 2011. Numerical solution of
multiple nonlinear Volterra integral equations. Applied
Mathematics and Computation, Vol. 217(9), pp. 4791-
4804.
Solodusha, S.V., Gerasimov, D.O., Suslov, K.V., 2014.
Modeling of Wind Turbine with Volterra Polynomials.
In VII International Symposium GSSCP
, pp. 161-163
(in Russian).
Pronin, N.V., Martyanov, À.S., 2012. Model of Wind
Turbine in the Package MATLAB. Bulletin of the South
Ural State University. Series Power Engeneering, No.
37(296), pp. 143-145 (in Russian).
Perdana, A., Carlson, O., Persson, J., 2004, Dynamic
Response of Grid-Connected Wind Turbine with
Doubly Fed Induction Generator during Disturbances.
In. IEEE Nordic Workshop on Power and Industrial
Electronics.
Sedaghat, A., Mirhosseini, M., 2012. Aerodynamic design
of a 300 kW horizontal axis wind turbine for province
of Semnan. Energy Conversion and Management. Vol.
63, pp. 87-94.
Doyle III, F., Pearson, R., Ogunnaike, B., 2002.
Identification and Control Using Volterra Models.
Springer-Verlag,
Rugh, W.J., 1981. Nonlinear System Theory: The
Volterra/Wiener Approach, Johns Hopkins University
Press, Baltimore, MD.
Danilov, L.V., Matkhanov, L.N., Filippov, V.S. 1990. A
Theory of Non-Linear Dynamic Circuits. Moscow:
Energoizdat (in Russian).
Ljung, L. System Identification. Theory for the User, 1987.
Apartsyn, A.S. Nonclassical linear Volterra equations of
the first kind. Boston: VSP Utrecht, 2003.
Apartsyn, A.S., Solodusha, S.V., 2000. Mathematical
simulation of nonlinear dynamic systems by Volterra
series. Engineering Simulation. Vol. 17, No. 2, pp. 143-
153.
Apartsyn, A.S., Solodusha, S.V., Spiryaev, V.A., 2013.
Modeling of Nonlinear Dynamic Systems with Volterra
Polynomials: Elements of Theory and Applications.
IJEOE, V. 2, No. 4, pp. 16-43.
Solodusha, S.V., 2009. A class of systems of bilinear
integral Volterra equations of the first kind of the
second order. Automation and Remote Control. Vol. 70,
No. 4, pp. 663-671.
SMARTGREENS2015-4thInternationalConferenceonSmartCitiesandGreenICTSystems
200
