
Collaborative Activities Understanding from 3D Data
Fabrizio Natola, Valsamis Ntouskos and Fiora Pirri
ALCOR Lab, Department of Computer, Control and Management Engineering ’Antonio Ruberti’,
Sapienza University of Rome, Rome, Italy
1 STAGE OF THE RESEARCH
The aim of this work is the recognition of activities
performed by collaborating people, starting from a 3D
data sequence (specifically, a MOCAP sequence), in-
dependently from the point of view from which the
sequence is taken and from the physical aspects of
the subjects. Many progresses have been made in
this field and, in particular, we start from results,
for the recognition of actions performed by a sin-
gle person, obtained in the past years, by Medioni,
Gong and other authors, (Gong et al., 2014; Gong
and Medioni, 2011; Gong et al., 2012), trying to go
a step forward. Following their works, actions are
represented by structured multivariate time series in
the joint-trajectories space. Two main methods are
considered for solving this problem. First, given a
sequence consisting of an arbitrary number of ac-
tions, Kernelized Temporal Cut is applied to find the
time instants in which action transitions occur. Then,
the spatio-temporal manifold model, a framework de-
signed by (Gong and Medioni, 2011), is used for rep-
resenting the time series data in a one-dimensional
space and the spatial-temporal alignment algorithm is
introduced in order to find matches between action
segments. The resulting procedure, named Dynamic
Manifold Warping, allows us to classify actions, just
by comparing the current action segment with few la-
belled sequences taken from a given database. The
works cited above omit several issues and, without
a clear parametrization of them, no implementation
is possible. We have sorted out the most suitable
parametrization for our implemented algorithm ob-
taining a good performance in the experiments.
2 OUTLINE OF OBJECTIVES
The main objectives of our work consist in introduc-
ing a model that learns the parameters of a distance
function on the manifold of the activity sequences.
This function would allow the recognition model to
generalize from experience, improving the learning.
On these bases, we will be able to pass from the
recognition of activities performed by a single person
to the recognition of activities acted by collaborating
people. Most of the research so far has concentrated
on single activities ((Gong et al., 2014; Ning et al.,
2008; Li et al., 2010), just for citing few of them).
Moreover, some works have focused on problems
such as the alignment of sequences in time and/or in
space, without focusing on learning a function that al-
lows to generalize the model. In particular, the work
developed by Gong et al., (Gong et al., 2014; Gong
and Medioni, 2011; Gong et al., 2012), regarding the
recognition part, is an instance-based approach, since
nearest neighbors is considered. In fact, once the
Dynamic Manifold Warping algorithm is applied, we
have a distance measure between the current testing
sequence and all the labelled sequences maintained in
a dataset. The label of the nearest sequence (accord-
ing to Dynamic Manifold Warping) is then assigned to
the testing sequence. Because of this aspect and the
design of the spatial-temporal alignment algorithm,
only few sequences are needed as labelled (for each
type of action) to be compared with the testing se-
quences. On one hand this property can be accounted
as positive, since we do not need a large amount of
training sequences. On the other hand, however, an
approach of this kind has some drawbacks. In fact,
the classification in time depends on the number of
training sequences and we may obtain wrong answers
at query time because of irrelevant attributes. More-
over, the approach does not provide an explicit model
for each action class, and therefore it cannot general-
ize based on the training sequences.
3 RESEARCH PROBLEM
The research problem is twofold, since to comply
with our objectives, some basic formal results are
needed. Indeed, to model the sought-after recognition
of complex actions, such as the collaboration of two
people, we first have to provide a representation of the
sequences that is flexible and easy to access by the
19
Natola F., Ntouksos V. and Pirri F..
Collaborative Activities Understanding from 3D Data.
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

recognition process. We search for a space in which
we can map the frame points (i.e. points correspond-
ing to the poses of the human skeleton over time) and
in which we do not loose information regarding action
sequences performed by several people.
In section 4, we describe related works regarding
human activity recognition. In section 5, we explain
our current research and possible solutions to over-
come the problems mentioned above.
4 STATE OF THE ART
The problem of human activity recognition has been
treated in many works from different points of view
such as considering, for example, stochastic or non-
parametric models.
First, we mention some works which concern the
activity recognition starting from video sequences.
In (Junejo et al., 2011), the authors consider the ac-
tion recognition from videos acquired from multiple
cameras, studying the similarities of activities over
time (building a so-called Self-Similarity matrix), us-
ing some low-level features (e.g. point-trajectories or
HOG descriptors).
In (Weinland et al., 2010), 3D HOG descriptors
are extracted from the training data for obtaining
recognition which is robust to occlusions and inde-
pendent from the point of view from which the scene
is observed.
Concerning MOCAP sequences, a graph model
called Action Net is considered in (Lv and Nevatia,
2007). Each node in the graph represents a 2D ren-
dered figure (called key pose) of a MOCAP pose taken
from a single view. An edge in the graph, between
two nodes, indicates that the two key poses are corre-
lated, in the sense that it represents a transition within
a single action class or a transition between two dif-
ferent actions. The Shape Context, which acts as a
descriptor of the human silhouette, is considered and
stored in each node of the graph. The rendering pro-
cess is however a drawback if we consider the mem-
ory and time required for this operation.
An other important work is (Lv and Nevatia,
2006), in which the authors decompose the 3D joint
position space into a set of feature spaces. Each of
these subspaces represents the motion of a single part
of the body, or the combination of multiple ones. The
dynamic information is learned by means of Hidden
Markov Models and, in order to improve the accuracy
of the recognition phase, AdaBoost is applied.
There are several works that are strictly related to
the topic of study discussed here. In fact, some ap-
proaches try to find a low dimensional manifold on
which the human motions lie, which they then use in
order to solve the problem of recognition. By finding
a mapping function from the high dimensional space
of the motion to the manifold, it is possible to reduce
the dimensionality of the problem.
In (Liao and Medioni, 2008), the authors make
use of Tensor Voting for tracking faces in 3D and de-
ducing the facial expressions. We mention this work,
even if it is not related to activity recognition, be-
cause it shares many similarities with the approach
proposed in (Gong et al., 2014) for constructing the
spatio-temporal manifold. In this latter work, Ten-
sor Voting (Mordohai and Medioni, 2010) is applied
for learning the one dimensional path along the spa-
tial manifold on which the frame points lie, consisting
the spatio-temporal manifold. By inferring a latent
variable which parameterizes this path, it is then pos-
sible to apply the temporal and spatial alignments (by
means of Dynamic Manifold Warping) for obtaining
the distance measure between pairs of sequences and
understanding how similar they are.
Another way of modeling a human motion is de-
scribed in (Zhang and Fan, 2011). Here, the authors
consider an action to be modeled using a toroidal
two-dimensional manifold in which the horizontal
and vertical circles represent two different variables:
gait and pose, respectively. This manifold can be
identified by considering a joint gait-pose manifold
(JGPM), which is based on Gaussian Process Latent
Variable Model (GP-LVM), (Lawrence, 2004).
Finally, in (Ntouskos et al., 2013), sequence
alignment kernels (Noma, 2002; Cuturi et al.,
2007) are combined with Back-Constrained GP-
LVM (Lawrence and Quinonero-Candela, 2006), for
achieving action recognition. Also in this case, a
dimensionality reduction is performed for mapping
MOCAP data into a lower-dimensional manifold.
5 METHODOLOGY
In this section, we concentrate on discussing the prob-
lems that we have noticed, proposing different contri-
butions to improve the work of Gong et al. In the first
part, we explain the problem of constructing a learn-
ing function from which we can generalize the model
of (Gong et al., 2014), and in the second part we give
possible research directions in order to achieve recog-
nition of activities made by two people that work to-
gether.
ICPRAM2015-DoctoralConsortium
20

5.1 Generalization of the Model
Following the idea of Gong et al. in (Gong et al.,
2014), we consider a MOCAP sequence as a multi-
variate structured time series. In this sense, the se-
quence can be encoded in a matrix. Namely, the ma-
trix is constructed in the following way:
M = [x
1
x
2
··· x
L
],
where L is the length of the sequence in terms of num-
ber of frames and each x
i
, for i = 1, · · · , L, represents
the joint positions at time i. Namely:
x
i
=
p
1
p
2
.
.
.
p
J
,
where J is the number of joints considered in the MO-
CAP skeleton, and each p
j
, for j = 1, ··· , J, is the po-
sition of the j-th joint. Each p
j
is in turn composed
by its x, y, z positions:
p
j
=
p
x
j
p
y
j
p
z
j
.
Therefore, each frame is considered as a point in
a high dimensional space. In detail, the space has di-
mension D, where D = 3 ×J. However, we can make
some assumptions that are useful for reducing the di-
mensionality of the problem. First of all, skeleton mo-
tion is constrained in time. Secondly, if we move a
limb, it is very likely that other limbs linked to the
former will move also. Because of these constraints,
we can safely say that these points lie on a manifold
having dimension S < D.
In order to obtain a learning function, we cannot
directly apply learning methods such as the Support
Vector Machines (SVM) or discriminant analysis, be-
cause the points lie on a non Euclidean space. We
need to find a suitable transformation that allows us to
apply these methods in our case. (Vemulapalli et al.,
2013), for example, use kernel functions for mapping
the points on a Riemannian manifold into a Reproduc-
ing Kernel Hilbert Space (RKHS) H . This latter is a
Hilbert space endowed with the reproducing property:
h f (·), k(·, x)i = f (x)
for each function f ∈ H and every x ∈ X , where X
is the domain of the variable x and h·, ·i is the inner
product operator. Consequently, we can derive:
k(x, y) = hΦ(x), Φ(y)i
H
,
where Φ(x) = k(·, x) is the feature mapping function
from X to H . This transformation allows to apply one
of the classical learning algorithms, such as SVM, for
constructing a learning function needed for the clas-
sification process. An important question pointed out
by Vemulapalli et al. in (Vemulapalli et al., 2013) is
how to select a good kernel for mapping the points on
the manifold into the RKHS. The answer comes from
(Rakotomamonjy et al., 2008), in which the authors
construct a kernel as a linear combination of simpler
base kernels:
K =
M
∑
i=1
µ
i
K
i
,
with µ ∈ R
M
being a vector of positive weights that
must be found, and K
i
being the base kernels. There-
fore the problem is to jointly optimize the classifier
problem and the kernel problem:
min
W,K
λL
M
(K) + L
C
(W, K),
where L
M
(K) is the manifold structure cost, while
L
C
(W, K) is the classifier cost. These are functions of
the arguments of the minimization W and K, which
are in turn the parameters for the classifier and the
kernel function, respectively.
5.2 Recognition of Activities Made by
Two Collaborating People
As mentioned before, many progresses have been
made in human action recognition based on labelled
MOCAP sequences, but so far temporal analysis has
mainly focused on sequences corresponding to a sin-
gle subject, even of several subsequent activities. For
a single subject sequence the temporal segmentation
problem is about identifying the correct subdivision
of all the activities, up to single actions. Significant
contributions in this direction are, for example (Ali
and Shah, 2010; Gong et al., 2014; Gong et al., 2012).
With a single MOCAP sequence, temporal segmen-
tation takes care of the chain of actions to feed the
recognition process, and both temporal manifold and
spatio-temporal alignments do not consider compos-
ite motion of more than a person. Moreover, as tem-
poral motion is highly varying amid different peo-
ple, the problem cannot be simply lifted to two dif-
ferent motions acting in parallel. In fact this prob-
lem requires the existence not only of two temporal
sequences, but also constraints between them which
model the interaction (Li et al., 2013; Ryoo and Ag-
garwal, 2011).
After having generalized the model and having
constructed a suitable learning function, we go a step
CollaborativeActivitiesUnderstandingfrom3DData
21
forward and consider the recognition of the interleav-
ing process between two action sequences. We as-
sume that labelled MOCAP data are provided (see
the image sequence in Figure 1) and the objective is
to predict the interleaving steps of the two processes.
The main contribution is the spatio-temporal align-
ment of the two motion sequences so as to identify
when and how the two sequences intertwine due to an
action requiring the collaboration of two subjects.
In particular we are interested in the collabora-
tion in a working environment between two operators
executing a task that requires to handle tools, pass
them and, possibly, handling together some item, in
which case the spatio-temporal alignment is crucial.
We consider motion sequences of industrial related
activities performed by human operators, as for ex-
ample maintenance and repair operations. We focus
on learning interaction patterns involved in collabo-
ration type of actions, in order to be able to identify
the time instances where physical interaction occurs.
These time instances serve as nodal points which de-
termine the evolution of the whole interactive activity.
Identifying these nodal points is a crucial issue. In
fact these points may vanish by using solely Latent
Variable Models (Tenenbaum et al., 2000; Roweis
and Saul, 2000; Wang et al., 2008; Mordohai and
Medioni, 2010) during the mapping from the ambient
space to the intrinsic, lower-dimensional space. In or-
der to avoid this, we shall consider three sequences:
one for each person involved and one for the inter-
leaved action. By learning the nodal points involved,
we can learn a model of the interleaved action. In the
case of simultaneous handling of items, the evolution
of the action between the nodal points also plays an
important role. In particular, spatio-temporal align-
ment with respect to prototypical evolutions of the
action is necessary in order to be able to maintain
continuous interaction and evaluate its dynamics. The
model of the interleaved action can be later used for
enabling analogous human-robot interactions. We can
think that the role of one of the two people involved
can be substituted by a robot. In this latter case, the
robot has to understand the motion of the person it is
assisting, and it has to decide which action it has to
perform.
6 EXPECTED OUTCOME
By implementing our version of the framework pro-
posed by Gong et al. in (Gong et al., 2014), we have
achieved high accuracy in recognition by considering
MOCAP skeletons composed by 31 joints. In partic-
ular, we have taken into account 7 actions (i.e. squat,
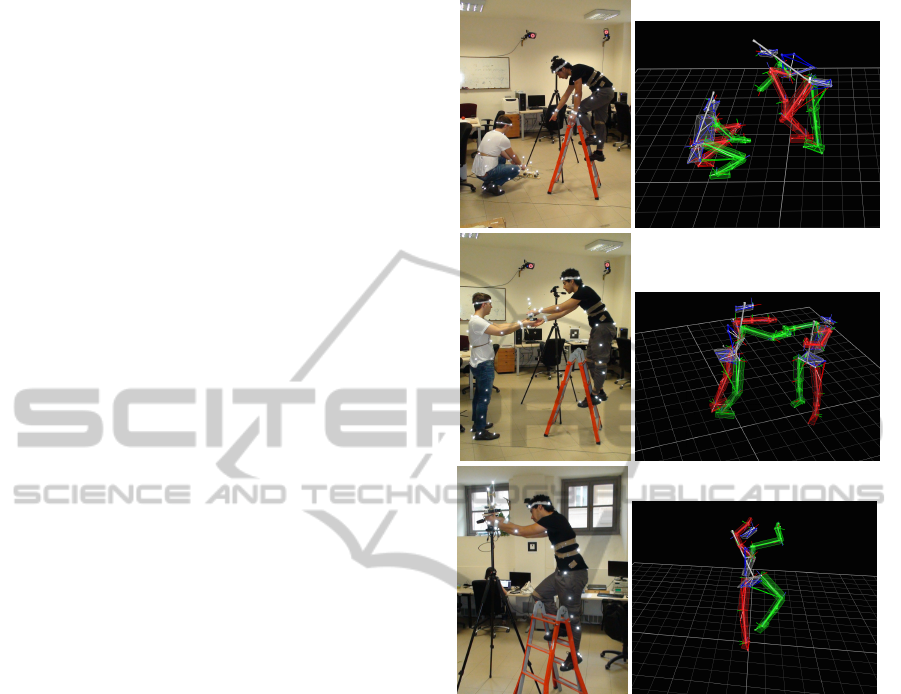
Figure 1: A collaboration action sequence illustrating two
subjects executing an interleaving task. Left col.: Instances
of the action; Right col.: Corresponding MOCAP poses. We
consider as input 3D points, that in our case are obtained by
a Vicon system, but they can be also computed from a depth
video.
run, hop, walk, kick, sit down, rotate arms), each of
which performed by 5 different subjects, for a total
of 35 sequences. Each sequence is compared with all
the other ones and the accuracy is computed as the
number of right recognized sequences over the total
number of sequences. The resulting accuracy is equal
to 86% suggesting that the algorithm recognizes a sig-
nificant number of sequences.
We noticed that even in the presence of some
joints that may introduce noise (such as near the hands
and the feet), the accuracy is very satisfactory. We ex-
pect to generalize the model and to construct a learn-
ing function capable of representing distances in a
space where actions performed by different people
can be represented.
ICPRAM2015-DoctoralConsortium
22

REFERENCES
Ali, S. and Shah, M. (2010). Human action recognition in
videos using kinematic features and multiple instance
learning. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 32(2):288–303.
Cuturi, M., Vert, J., Birkenes, O., and Matsui, T. (2007).
A kernel for time series based on global alignments.
In Acoustics, Speech and Signal Processing, 2007.
ICASSP 2007. IEEE International Conference on, vol-
ume 2, pages II–413–II–416.
Gong, D. and Medioni, G. (2011). Dynamic manifold warp-
ing for view invariant action recognition. In Computer
Vision (ICCV), 2011 IEEE International Conference
on, pages 571–578.
Gong, D., Medioni, G., and Zhao, X. (2014). Structured
time series analysis for human action segmentation
and recognition. Pattern Analysis and Machine In-
telligence, IEEE Transactions on, 36(7):1414–1427.
Gong, D., Medioni, G., Zhu, S., and Zhao, X. (2012). Ker-
nelized temporal cut for online temporal segmentation
and recognition. In Computer Vision–ECCV 2012,
pages 229–243. Springer.
Junejo, I., Dexter, E., Laptev, I., and Perez, P. (2011).
View-independent action recognition from temporal
self-similarities. Pattern Analysis and Machine Intel-
ligence, IEEE Transactions on, 33(1):172–185.
Lawrence, N. D. (2004). Gaussian process latent variable
models for visualisation of high dimensional data.
Advances in neural information processing systems,
16:329–336.
Lawrence, N. D. and Quinonero-Candela, J. (2006). Local
distance preservation in the gp-lvm through back con-
straints. In Proceedings of the 23rd international con-
ference on Machine learning, pages 513–520. ACM.
Li, R., Chellappa, R., and Zhou, S. K. (2013). Recognizing
interactive group activities using temporal interaction
matrices and their riemannian statistics. International
journal of computer vision, 101(2):305–328.
Li, W., Zhang, Z., and Liu, Z. (2010). Action recognition
based on a bag of 3d points. In Computer Vision and
Pattern Recognition Workshops (CVPRW), 2010 IEEE
Computer Society Conference on, pages 9–14.
Liao, W.-K. and Medioni, G. (2008). 3d face tracking and
expression inference from a 2d sequence using mani-
fold learning. In Computer Vision and Pattern Recog-
nition, 2008. CVPR 2008. IEEE Conference on, pages
1–8.
Lv, F. and Nevatia, R. (2006). Recognition and segmenta-
tion of 3-d human action using hmm and multi-class
adaboost. In Computer Vision–ECCV 2006, pages
359–372. Springer.
Lv, F. and Nevatia, R. (2007). Single view human action
recognition using key pose matching and viterbi path
searching. In Computer Vision and Pattern Recogni-
tion, 2007. CVPR ’07. IEEE Conference on, pages 1–
8.
Mordohai, P. and Medioni, G. (2010). Dimensionality esti-
mation, manifold learning and function approximation
using tensor voting. The Journal of Machine Learning
Research, 11:411–450.
Ning, H., Xu, W., Gong, Y., and Huang, T. (2008). La-
tent pose estimator for continuous action recogni-
tion. In Computer Vision–ECCV 2008, pages 419–
433. Springer.
Noma, H. S. K.-i. (2002). Dynamic time-alignment kernel
in support vector machine. Advances in neural infor-
mation processing systems, 14:921.
Ntouskos, V., Papadakis, P., Pirri, F., et al. (2013). Discrim-
inative sequence back-constrained gp-lvm for mocap
based action recognition. In International Conference
on Pattern Recognition Applications and Methods.
Rakotomamonjy, A., Bach, F., Canu, S., Grandvalet, Y.,
et al. (2008). Simplemkl. Journal of Machine Learn-
ing Research, 9:2491–2521.
Roweis, S. T. and Saul, L. K. (2000). Nonlinear dimension-
ality reduction by locally linear embedding. Science,
290(5500):2323–2326.
Ryoo, M. and Aggarwal, J. (2011). Stochastic represen-
tation and recognition of high-level group activities.
International journal of computer Vision, 93(2):183–
200.
Tenenbaum, J. B., De Silva, V., and Langford, J. C. (2000).
A global geometric framework for nonlinear dimen-
sionality reduction. Science, 290(5500):2319–2323.
Vemulapalli, R., Pillai, J., and Chellappa, R. (2013). Ker-
nel learning for extrinsic classification of manifold
features. In Computer Vision and Pattern Recogni-
tion (CVPR), 2013 IEEE Conference on, pages 1782–
1789.
Wang, J., Fleet, D., and Hertzmann, A. (2008). Gaussian
process dynamical models for human motion. Pat-
tern Analysis and Machine Intelligence, IEEE Trans-
actions on, 30(2):283–298.
Weinland, D.,
¨
Ozuysal, M., and Fua, P. (2010). Making
action recognition robust to occlusions and viewpoint
changes. In Computer Vision–ECCV 2010, pages
635–648. Springer.
Zhang, X. and Fan, G. (2011). Joint gait-pose manifold for
video-based human motion estimation. In Computer
Vision and Pattern Recognition Workshops (CVPRW),
2011 IEEE Computer Society Conference on, pages
47–54.
CollaborativeActivitiesUnderstandingfrom3DData
23
