
Coalition Formation for Simulating and Analyzing Iterative Prisoner’s
Dilemma
Udara Weerakoon
Computer Science Department, Utah State University, Logan, Utah, U.S.A.
Keywords:
Spatial Prisoners Dilemma, Imitator Dynamics, Memetic, Coalition Formation, Game Theory.
Abstract:
In this paper, we analyze the strictly competitive iterative version of the non-zero-sum two player game, the
Prisoner’s Dilemma. This was accomplished by simulating the players in a memetic framework. Our pri-
mary motivation involves solving the tragedy of the commons problem, a dilemma in which individuals acting
selfishly destroy the shared resources of the population. In solving this problem, we identify strategies for
applying coalition formation to the spatial distribution of cooperative or defective agents. We use two rein-
forcement learning methods, temporal difference learning and Q-learning, on the agents in the environment.
This overcomes the negative impact of random selection without cooperation between neighbors. Agents
of the memetic framework form coalitions in which the leaders make the decisions as a way of improving
performance. By imposing a reward and cost schema to the multiagent system, we are able to measure the
performance of the individual leader as well as the performance of the organization.
1 INTRODUCTION
Game theory originated as a branch of applied math-
ematics, and found applications in the social sci-
ences, such as economics, political science, social
studies, and international relations (Axelrod, 1995;
Aunger, 2000). Currently, game theory is expand-
ing its horizon into other realms like computer sci-
ence, biology, engineering, and philosophy. In com-
puter science, game theory concepts are used to un-
derstand the competition between agents where indi-
vidual agents perform better when they impose penal-
ties on other individual agents. If one agent does bet-
ter, another does proportionally worse. Game theory
also shows them how they impact society as a whole
(Smith and Prince, 1973). Prisoner’s Dilemma (PD)
is a well-studied problem (Burguillo-Rial, 2009; Grif-
fiths, 2008; Nowak and Sigmund, 1998; Riolo et al.,
2001) that handles the above mentioned competition
which is referred to as social dilemma.
Hardin (Hardin, 1968) describes society’s
dilemma. In society, each individual acts indepen-
dently based on his or her self-interest, using the
rational decision making process. Even when it
is clear that these decisions are not conducive to
achieving its long-term goals, it is not surprising
to see that such decisions eventually lead to the
destruction of the shared resources of the society.
This scenario illustrates a concept usually referred to
as the tragedy of commons (Hardin, 1968). Tragedy
of commons can be observed in many fields including
multiagent systems (Gotts et al., 2003) and those
related to environmental issues such as sustainability
and competing behavior of parasites (Smith and
Prince, 1973). The commons dilemma stands as a
model for various types of resource consumption
problems in society. Some examples of these scarce
natural resources are water, land, and non-renewables
such as oil and coal. It is advisable to simulate
this model in a multiagent environment so that we
may experiment with techniques and strategies that
overcome or ameliorate the effect of the tragedy of
commons.
In this paper, we employ evolutionary game the-
ory and focus on a simulation using a memetic frame-
work of an organized society of replicate agents in
which an agent acts as either a defector or a coop-
erator. When an agent acts as a cooperator, it un-
selfishly interacts with an opponent in a fair manner
towards the consumption of shared resources. On the
other hand, the agent in the role of defector acts self-
ishly towards an opponent. Under the rules and con-
straints of PD, our experiment investigates the validity
of the fundamental behavior of agents called primi-
tive actions, and the effects of two reinforcement ma-
chine learning strategies: temporal difference learn-
22
Weerakoon U..
Coalition Formation for Simulating and Analyzing Iterative Prisoner’s Dilemma.
DOI: 10.5220/0005199000220031
In Proceedings of the International Conference on Agents and Artificial Intelligence (ICAART-2015), pages 22-31
ISBN: 978-989-758-073-4
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

ing (TDL) (Leng et al., 2008) and Q-learning (QL)
(Watkins and Dayan, 1992). This experimental in-
vestigation is used to identify the effect of TDL and
QL in motivating agents to cooperate with each other
for sharing the societal benefits (utilities/rewards) in a
manner that is as fair as possible to reduce the devas-
tation of tragedy of commons.
We consider a multiagent system that is populated
on a grid with each cell representing an individual
agent. Each agent deploys its learning model which
helps the agent analyze its knowledge gained through
lessons learned from a limited number of previous
iterations of the game. This helps the agent to se-
lect the most successful behavior (in terms of utili-
ties earned), and then the agent uses the most suc-
cessful behavior for the current situation. To do that,
the agent uses previously gained knowledge. The as-
sumption of limited memory enables us to model the
social dilemma with in computational limitations in
terms of resources and time.
The following illustrates some capabilities of an
agent in this environment. An agent may remain iso-
lated rather than join a coalition. In line with ratio-
nal agents’ society, an individual will not be willing
to join a coalition that is considered weak or a coali-
tion whose potential success in the future is equally
weak. Hence, it is rational that individuals act inde-
pendently. An agent may also act as a cooperator or
a defector as a result of its most recent game iteration
experiences.
In the scenario where an agent decides to join a
coalition, it pays a one-time joining fee to the leader
and then collaborates with the other coalition mem-
bers. A coalition member decides to cooperate or de-
fect with a member from another coalition by utiliz-
ing the lessons learned from the past interactions with
the corresponding coalition. As a coalition member,
if the agent realizes that the remuneration in its util-
ity is not worthwhile after evaluating its neighbors’
utilities, the agent does not engage with the coalition.
There is a social tendency to form a coalition around
a successful leader in terms of power, capital, and
strength to secure success in future endeavors, either
as an individual or as a group, by contributing money,
effort, or ideas. In reality, being a member of a com-
munity guarantees an individual’s fair consumption of
shared resources, and the protection of earned utilities
against threats of violence from other communities.
We analyze the utility that the agent’s society
earns as a consequence of cooperation or defection
by comparing the utility with ideal best cases. Perfor-
mance of the leader is analyzed according to its coali-
tion size and its individual utility. We investigate the
societal structure with the objective of minimizing the
consequence of the tragedy of commons, and herein
present our findings. QL experimentally outperforms
TDL in minimizing the negative impact of defection,
by facilitating agents to cooperate as coalition mem-
bers.
In a society that has reached stability, or equi-
librium, the cooperative agent society forms a lower
number of stable coalitions than might exist in a soci-
ety of non-cooperators. But even so, the approximate
number of members in each stable coalition remains
the same.
2 RELATED WORK
Riolo, Cohen and Axelrod (Riolo et al., 2001) (RCA)
describe a tag-based approach to cooperation in which
an agent’s decision to cooperate is based on whether
arbitrary tags of both agents are sufficiently similar to
each other. Tag-based cooperation is independent of
past or future interactions within the current genera-
tion. Situations in which the environment is dynamic
and agents reproduce, the value of the tag is typically
dependent on the parent’s action, not the action within
the current generation. In their model, each agent is
initially randomly assigned a tag value and a tolerance
level with a uniform distribution [0, 1]. An agent co-
operates with a recipient agent if the recipient’s tag
value is within the agent’s tolerance level. Thus, the
agent with a higher tolerance value cooperates with
agents that have a wide range of tags, while others
with a low tolerance level cooperate with an agent that
has a very similar tag. In their simulation, each agent
acts as a potential cooperator in P interaction pairs,
after which the population of the agents is reproduced
in proportion to their relative score as determined by
the game matrix of PD. During reproduction, each
offspring’s tag and tolerance value are subjected to
potential mutations such that new tags and tolerance
values are produced according to a probability distri-
bution. Ultimately, they found that this approach en-
ables a higher cooperation rate within the simulation
without reciprocity. Our model differs from this in
that, we use coalition formation, rather than tag val-
ues, to achieve a higher cooperation level by consid-
ering similar behavior of ethical and political groups
in the society.
Griffiths (Griffiths, 2008) demonstrates an ap-
proach to remedy the tragedy of commons that com-
bines the tag-based approach of the RCA model
and the image-scoring approach of Nowak and Sig-
mund (Nowak and Sigmund, 1998). Griffiths’ simu-
lation differs from the RCA approach as he introduces
cheater agents who refuse to cooperate even though
CoalitionFormationforSimulatingandAnalyzingIterativePrisoner'sDilemma
23

the rules of the system require them to do so. Al-
though Griffiths introduced cheater agents, his model
enabled an agent to identify cheaters to avoid interac-
tion with them, and corporate with other agents who
are trustworthy. However the author extended the
image-scoring approach to reduce the requirement for
indirect reciprocity. In particular, an agent uses an
estimate of the combined image score of its neigh-
bors’ to reduce the impact of cheaters. Agents use
what they have learned in the reproduction phase,
such that each agent compares itself to another and
adopts the other’s tag and tolerance if the other’s score
is higher. There are two ways to determine reproduc-
tion: 1) Interval-based reproduction - An agent re-
produces after a fixed number P of interactions and
2) Rate-based reproduction - They specify a repro-
duction probability that represents the probability that
an agent will reproduce after each interaction. In
our model, in an effort to overcome the problem of
abysmal cooperation present as a result of the PD,
we will analyze the effect of coalition formation with
TDL and QL. However, historical records of an agent
provide some accurate evidence in deciding the best
action to play because the reproduction of agents is
not considered in our model.
Burguillo-Rial (Burguillo-Rial, 2009) (BR) exper-
imented with a multiagent organization in which each
agent has two options: cooperate or defect. BR pre-
sented a model using a memetic framework and evo-
lutionary game theory to simulate a spatial and iter-
ated PD. Each agent has local knowledge of the en-
vironment, and the individual’s knowledge is limited
to the number of neighbors within a predefined ra-
dius. In his model, the agent population is placed on
a square lattice (40 × 40), where each cell is consid-
ered an agent. Isolated agents can apply algorithms
probabilistic tit-for-tat or learning automata for se-
lecting a cooperative or defective strategy. Agents
have the ability to form a coalition that has a leader
agent which decides the coalition’s strategy. In our
model, using the same framework, we have extended
the simulation boundaries by introducing the use of
TDL and QL. Then we analyze the consequences of
those learning methods on individuals, and as well as
on the agents’ society.
3 EVOLUTIONARY GAME
THEORY AND MEMETICS
This section introduces two important concepts that
are related to the simulation and framework of our
experiment: 1) evolutionary game theory (Smith and
Prince, 1973) and 2) memetics (Aunger, 2000). Game
theory describes the feasibility of applying multia-
gent system strategies to find an approach to solve
the well-known and difficult problem of PD. Follow-
ing, memetics and its framework are discussed with
respect to each agent’s behavior in a multiagent sys-
tem.
3.1 Evolutionary Game Theory
Maynard-Smith and Price (Smith and Prince, 1973)
introduced the formalization of evolutionarily stable
strategies as an application of a mathematical the-
ory to enable the formal study of games. Ultimately,
that formal study enabled researchers to apply con-
clusions and observations from Evolutionary Game
Theory (EGT) (Smith and Prince, 1973) to other re-
search areas like artificial intelligent, economics and
sociology. Currently, EGT seems to be the predomi-
nant theoretical tool in use for the analysis of multi-
agent systems, especially when considering coopera-
tion and negotiation.
Many of the solution concepts of EGT remain at
a descriptive level, meaning the solution concepts de-
scribe the properties of appropriate and optimal so-
lutions, without explaining how to compute the solu-
tions. Moreover, the complexity of computing such
solutions remains very hard at the level of NP-hard
or worse. Multiagent systems significantly points out
these problems which facilitates a researcher’s ability
to develop tools to address them.
Evolutionary Stable Strategy (ESS) (Smith and
Prince, 1973) plays an important role in EGT. The
term ESS means an agent cannot benefit by changing
the current strategy while the others keep their strate-
gies unchanged. Nash equilibrium is a type of ESS
and well known in game-theory literature. It is also
one of the most important concepts in analyzing mul-
tiagent systems. The difficulty with this concept is
that not every interaction scenario has a Nash equilib-
rium, and that some interaction scenarios have more
than one.
3.2 Memetics
By definition, memetics (Aunger, 2000) is the theoret-
ical and empirical science that studies the replication,
spread, and evolution of memes. A meme is an infor-
mation pattern held in an individual’s memory that is
capable of being copied to another individual’s mem-
ory. A meme can be considered as a behavioral pat-
tern that can be transferred from one to another. This
transmission can be interpreted as imitator dynamics
in the multiagent system domain.
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
24
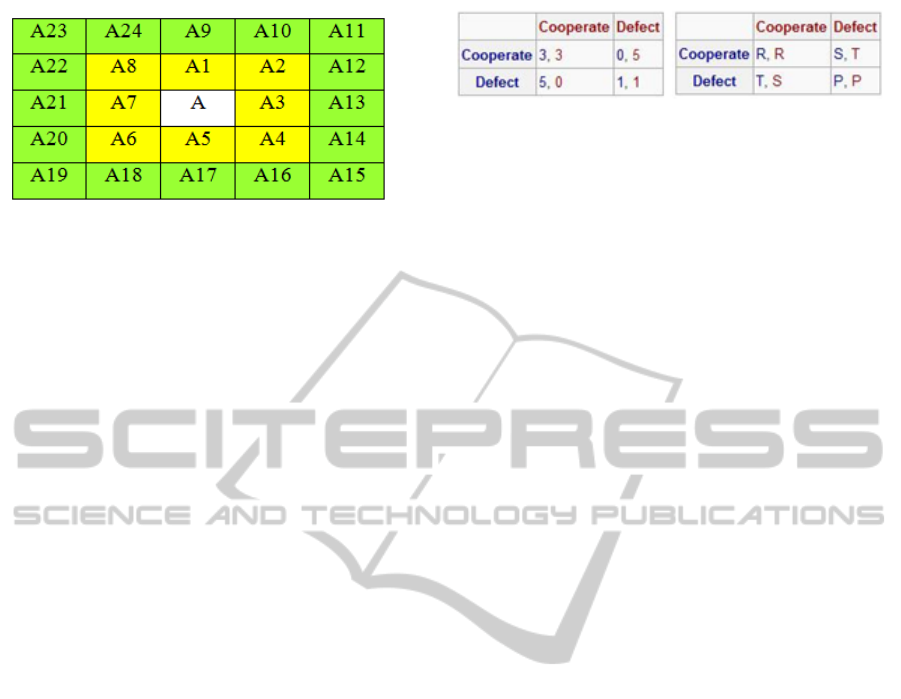
Figure 1: Cell agent A and two neighborhood radius 1 (yel-
low) and 2 (both yellow and green).
In this experiment, we model the memetics frame-
work by considering two characteristics of any suc-
cessful replicator: 1) Copying-fidelity: Copies of the
original pattern will remain after several rounds and
2) Longevity: the longer any instance of the replicat-
ing pattern survives, the more copies can be made of
it. The imitator characteristic of the memetics model
adds the behavior of imitation to agents, so the agent
can bring the most successful strategy to the next
round.
The memetics framework is the most suitable
model with regards to our agent society, because
the implementation of memetics simulates a society
wherein each individual agent has the option of two
primitive actions: cooperate or defect. Each individ-
ual agent has the same capability as the other agents
yet they may behave differently.
4 MULTIAGENT SYSTEM
The proposed approach we follow in this paper is ex-
plored using spatial games in which players (agents)
are either a pure cooperator or pure defector. They in-
teract with their neighbors in a two-dimensional array
of space, which enables them to analyze their neigh-
bors’ strategy from iteration to iteration.
4.1 Spatial Game
In our simulation, which is similar to BR, we place
the individual agent in a cell of a grid (i.e. a two-
dimensional spatial array). The individual agent plays
the game with a predefined set of neighbors that are
bounded by the neighborhood radius. In each round,
each agent first decides its status as an independent
agent, a deserter agent, or a member agent depend-
ing on the role of the agent and its opponent’s role
in the interaction. Second, the agent decides whether
to cooperate/defect with/to the opponent. We elabo-
rate each agent’s role and criteria of decision making
in Section 5. In this simulation, all the agents exist
Figure 2: Prisoner’s dilemma game matrix.
through the entire iteration, till the end. They are
static. The simulation version of this experiment is
designed for a discrete time, in the sense that the total
utility to each cell is evaluated, and then all cells are
updated simultaneously. This corresponds to the com-
mon biological situation wherein an interaction phase
is followed by a reproduction phase. For example, an
agent evaluates its neighbors’ utilities earned from the
previous iteration, but not the current iteration.
4.2 Basic Game Rules
Prisoner’s dilemma is a famous game matrix in game
theory and multiagent system. The concept is as fol-
lows: Two criminals have been arrested for a crime
and are being interrogated separately. On the one
hand, each knows that if neither of them talks, they
will be convicted and punished for lesser charges,
leading to each getting two years in prison. On the
other hand, if both confess they each will get ten years
in prison. If only one confesses and testifies against
the other, the one who did not cooperate with the po-
lice will get a life sentence and the one who did co-
operate will get parole. The utility function of each
agent is shown in Figure 2.
In Figure 2, T stands for the temptation to de-
fect, R for the reward for mutual cooperation, P for
the punishment of mutual defection, and S for the
sucker’s payoff. To be defined as the iterative PD,
the following two inequalities must hold:
T > R > P > S (1)
2R > T + S (2)
The first inequality (i.e. Equation 1) ensures Nash
equilibrium is defection, but the cooperation Pareto
dominates Nash equilibrium. If the second inequality
(i.e., Equation 2) does not hold, then full cooperation
is not necessarily Pareto optimal, if the game is re-
peatedly played by two players.
5 AGENT ROLES
Based on the idea that a society of humans can be
simulated in our agent based memetic framework,
CoalitionFormationforSimulatingandAnalyzingIterativePrisoner'sDilemma
25

we model different social groups as formed agent-
coalitions of this multiagent system. Even though so-
cial groups evolve, as is their nature, with hierarchical
roles which increase in number over time, for simplic-
ity, our model simulates only two roles, the leader and
the members of the coalition.
As a leader, an agent considers an interesting
trade-off between the size and the joining-fee of its
coalition. On the one hand, the size of a coalition
influences the strength of the leader proportionally,
meaning that if the size of the coalition is expand-
ing, the power of the leader is gradually increasing.
On the other hand, members of the coalition utilize
their resources, such as money, effort, or ideas on be-
half of the coalition. To represent these dual influence
factors of the coalition, we introduce a joining-fee, as
shown in Equation 3. With a joining-fee, the agent
who is willing to join a coalition is forced make a
one-time payment defined by the leader, but a higher
joining-fee motivates agents to consider some other
coalition with a lower joining-fee, ultimately weaken-
ing the leader of the coalition on a higher joining-fee.
joining-fee
l
i
= X −ln(
|
coalition(l
i
)
|
) (3)
In Equation 3, the joining-fee of a coalition that
is headed by leader agent l
i
is defined as the differ-
ence between a predefined value X and the natural
logarithm of the coalition’s size. In our model, the
joining-fee decreases with the increase in the number
of members in stable coalitions, and when the society
reaches equilibrium, the difference in the fees to join
these coalitions is negligible.
To represent the dual influence stated above, BR
imposes a fee on the members of a coalition for the
leader as a portion of their utilities in each iteration. In
contrast, the individual agent, who is willing to join a
coalition, does not consider the fee to join a coalition.
Instead the agent rewards the best neighbor agent in
the coalition. This is determined by analyzing the
earnings of the neighbor agent, in terms of the util-
ities paid so far in the iteration. The more the agent
earns, the better a neighbor it is.
In our simulation, irrespective of the agent’s role,
each agent selects its best neighbor according to the
following preference: 1) the best neighboring leader
(
ˆ
l
i
) in terms of its coalition’s joining-fee and earned
utilities; 2) the best neighbor ( ˆn
i
) that is selected
by utilizing the learning model and 2 heuristics: a
higher average and a higher rise of utilities in past few
rounds
1
. In the case of selecting the best neighboring
agent (
ˆ
l
i
or ˆn
i
), the learning model is utilized by agent
1
In our model, the number of considered past interac-
tions is a predefined limit for all agents.
i if it does not deploy the 2 heuristics described above
due to inadequate neighborhood interactions. After
selecting the best neighboring agent, each agent’s be-
havior is categorized according to its role.
1. Independent Agent: Leader
ˆ
l
i
invites agent i to
join with the coalition. In our model, agent i ac-
cepts the invitation to join the coalition by paying
the coalition’s joining-fee. However, if the best
neighbor ˆn
i
of agent i does not belong to the coali-
tion led by leader
ˆ
l
i
, then the agent will remain in-
dependent, and not join the coalition at this junc-
ture. If in the future it’s best neighbor and the
majority neighbors
2
of agent i join the coalition
led by leader
ˆ
l
i
, then agent i may also join at this
later time. In an interaction between each neigh-
bor, agent i decides to cooperate or defect based
on the outcome of its learning strategy. The de-
cision of agent i is independent of its neighbors’
current activities, but it depends on previous ex-
periences and learning practices with neighbors.
2. Member of a Coalition: Agent i may decide to ac-
cept or reject an invitation to join a different coali-
tion of leader
ˆ
l
i
based on the coalition’s size as a
heuristic. When the heuristic is false (i.e., size of
agent i’s coalition is large), agent i not only re-
fuses the invitation but also defects with leader
ˆ
l
i
.
If the heuristic is true agent i accepts the invita-
tion and joins a new coalition. Agent i joins a
coalition proposed by best neighbor ˆn
i
, when the
heuristic is true
3
and the value from the learning
model is optimistic. The optimistic value from the
learning model has a higher probability of coop-
eration with neighbors, and so earns higher utili-
ties in the future. If best neighbor ˆn
i
is an inde-
pendent agent and has positive interactions in the
past (according to the learning model) then agent
i invites ˆn
i
to join with its coalition. Positive in-
teractions express the level of cooperation in the
past. As mentioned above, agent i always coop-
erates with other members of the same coalition,
and follows the decision from the learning model
for other neighbors.
3. Leader of a Coalition: After determining the
under-performance of its coalition members (i.e.,
their utilities are negative), leader l dissolve the
coalition and all its members become independent
agents. In the case of interacting with best neigh-
boring leader
ˆ
l
l
, leader l merges with the coali-
tion proposed by
ˆ
l
l
based on 2 heuristics: 1) if
the size of the proposed coalition is sufficiently
2
The threshold value of selecting the majority prefer-
ence is predefined in the simulation.
3
|
coalition (i)
|
<
|
coalition (ˆn
i
)
|
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
26

larger
4
than the current one and 2) if neighboring
leader
ˆ
l
l
’s utility is higher than l’s. The other alter-
native is leader l defects with neighboring leader
ˆ
l
l
and coalition members of
ˆ
l
l
. By considering
the heuristic of coalition sizes
5
and the optimistic
value from the learning model as described above,
leader l gives up its leadership role to accept an in-
vitation to join neighbor ˆn
l
’s coalition and become
an agent. The next best member of the coalition
in terms of utilities then leads the coalition that
leader l left. Moreover, leader l defects with any
independent agents and members of other coali-
tions.
5.1 Learning from Experiences
Reinforcement learning is a mechanism in machine
learning that assumes that an agent perceives the cur-
rent state of the dynamic environment, and maps the
situation to an action in order to maximize the reward.
The next two sections discuss two main reinforcement
machine learning algorithms: TDL and QL.
5.1.1 Temporal Difference Learning
The agent learns how to achieve a given goal by a
trial-and-error approach. It then tags actions that gen-
erate higher rewards as successful actions that are safe
to use in future interactions, and tags others as failure
actions that it should avoid performing in the future.
In this manner, the agent learns to apply the best past
solution to new situations using a learning function
that is derived from TDL.
R
new
= R
old
+ β ·
{
[Rew(a
i
) · ρ] − R
old
}
(4)
In the equation 4, the term R
new
is the record of
the reward that will be updated to the knowledge base
and reused to select the action as described in Section
5. Rew(a
i
) is the reward of the action a
i
.
ρ = # cooperate neighbors ÷ #total neighbors (5)
In the equation 5, the parameter ρ is used to ex-
tract the reward made by cooperative neighbors in the
neighborhood. The learning rate β (0 ≤ β ≤ 1) indi-
cates the tendency of an agent to explore. A higher
learning rate indicates the agent is less likely to ex-
plore. Finally, the agent stores this result into the
knowledge base with the action. Instead of storing the
action and the total reward that is gained from games
played with all its neighbors directly to the knowl-
edge base, the agent should pick up a portion of the
4
The proportion of the coalition size should exceed a
predefined threshold.
5
|
coalition (l)
|
<
|
coalition ( ˆn
l
)
|
total reward that is influenced by cooperative agents
among all its neighbors. In this way, if the majority of
its neighbors are defectors, the agent tends to be a de-
fector. This is the dominant strategy of these games.
5.1.2 Q-Learning
Q-learning (Watkins and Dayan, 1992) is a
reinforcement-based learning process. The agent
in the game environment learns from feedback.
When it earns high utility from its actions, it tends
to repeat those actions. Since agents interact with
each other, and consequently learn from each other,
they do not need to construct an explicit model of the
environment.
The basic idea is that the agent acts according to
action a
i
∈ A to achieve a given goal. It receives feed-
back based on an individual reward that is calculated
after each action. The goal is for the agent to learn a
control policy (π) that maps the set of states (S) to a
set of actions (A) as follows:
π : S → A (6)
Equation 6 defines the policy of an agent. An
agent chooses an action a
i
that maximizes the accu-
mulative reward. The accumulative reward can be de-
fined as the sum of the rewards.
In Q-learning, an agent keeps a table with a lim-
ited capacity of action reward pairs,
h
a
i
, r
i
i
that con-
tain the value of taking a
i
and its reward r
i
. Every
time an agent performs an action, it can update its Q-
value. This information can then be used by the agent
to help decide which action to perform. Q-value is
updated by the following:
Q
k
(a
i
) = Q
(k−1)
(a
i
) + β ·
R
k
− ρ · max
ˆa
Q
(k−1)
( ˆa
i
) − Q
k
(a
i
)
(7)
In equation 7, Q
k
(a
i
) is the Q-value of the action
a
i
of the k
th
trial and max
ˆa
Q
(k−1)
( ˆa
i
) is the action ˆa
i
that gives the maximum Q-value of the (k − 1)
th
trial.
If a low learning rate is used, the agent is slow to
react to changes in the environment, whereas a high
learning rate means that the agent reacts quickly to
changes without exploring other possibilities.
5.2 Coalition Formation
In our simulation, we appoint leaders for the initial
set of coalitions created. From this point forward, the
coalitions are maintained as follows.
When a leader of a coalition leaves (as mentioned
above), the next agent with the highest rewards be-
comes the new leader of that coalition.
CoalitionFormationforSimulatingandAnalyzingIterativePrisoner'sDilemma
27

A leader agent can dissolve its coalition if the
coalition is too weak to make any positive progress, or
it can merge its coalition with a larger, stronger coali-
tion, but the leader will lose its position as a leader.
An agent identifies the best neighbor by utilizing
the learning model and 2 heuristics as follows:
• By considering the average of utilities in the past
few rounds;
• By considering the increase of utilities in the last
few rounds.
If the best neighbor agent is a member or a leader of
a coalition, the current agent may join that coalition,
as described previously, during the start of each itera-
tion.
5.3 Game Matrix
Coercion and extortion can be observed in any soci-
ety, especially when observed over the centuries as
strong ethical or political groups form. For this rea-
son, we present our memetic simulation framework
as the simple dynamic of pay or else (Axelrod, 1995).
Any agent (aggressor agent) can demand cooperation
from a neighbor agent, with the threat that if payment
is not forthcoming, there will be retaliation in the
form of increased payment. To represent this interest-
ing idea, the agent that initiates the demand needs to
raise weapons (threats) that consequently cost more.
So, we define the punishment as the damage caused
by the opponent: the war is the reason for armament
on both sides. Definitions are as follows:
P
i
= P − ln
coalition(A
j
)
(8)
P
j
= P − ln(
|
coalition(A
i
)
|
) (9)
Here, P
i
and P
j
are the punishment payoff of
agents A
i
and A
j
, respectively. The decision to de-
fect can be symbolized the raising of arms to de-
clare a war, so preparation for the war requires re-
sources for military research/trainings and manufac-
turing weapons. In a situation in which the oppo-
nent decides to unconditionally surrender (by cooper-
ating); the aggressor agent has no further additional
expenses. Since the aggressor agent receives more
payoff than its opponent, there is a higher probabil-
ity of expanding the coalition of the aggressor agent.
Hence, it can be considered as a net wealth-gain in
consequence of the threat.
As shown in Equation 8 and 9, the decision of both
agents to declare retaliation results in costs to both
sides, but more so to the weaker and smaller coalition
(as expressed by a percentage of the total expense).
Thus, the model is a rational one in which an agent
can impose more damage to the retaliated agent via
an alliance of other member agents in the same coali-
tion. Also, a higher number of member agents can
cause more damage to the opponent when both are
defecting.
Unlike in our model, suckers (i.e., agents who
cooperate while opponents are defecting) of the BR
model were penalized using the same criteria as men-
tioned above. So, in his model, a negative payoff for
an agent who cooperates, irrespective of the decision
to defect by the opponent, is guaranteed a penalty
without a rational decision. The decision of penal-
ized cooperative agents to ultimately join the coali-
tion, even though they had initially defected (espe-
cially when the coalition of the opponent is compara-
tive larger than the other agent) helps to form a coali-
tion so large that all the agents in the simulation be-
come a member, in the end.
6 SIMULATION RESULTS
This section describes the underlying implementation
of the simulation, experiment design, and outcomes in
light of the above discussed concepts and theories. As
discussed previously, the memetic framework is de-
signed using a grid with the same square dimensions,
and each cell is considered as an agent of the society.
Each cell is smart enough to determine its own role in
the simulation. When it acts independently, an agent
can deploy strategies to influence the action of the cur-
rent round. An agent can join a coalition or even lead
a coalition, because the framework simulation facili-
tates such an agent to work collaboratively with other
members of the coalition in an autonomous manner.
Moreover, the simulation provides the following ser-
vices:
1. Automated tests to minimize errors in the statisti-
cal analysis;
2. Easier to tune or change simulation parameters;
3. Automated data analysis and graphical represen-
tation of it.
The grid of the simulation consists of 50 × 50 =
2500 cells. Throughout our experiments, we use the
same grid size. Initially in our experiments, agents
are not allowed to form coalitions. In other words,
each agent is considered to be independent. After sev-
eral rounds, the agents are allowed to form coalitions
by utilizing the learning model and heuristics as de-
scribed above. In the interaction between neighbors
of any agent, an agent chooses to cooperate or defect
with the probability of 50%. The purpose of the initial
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
28
rounds is to allow agents to gain experience that even-
tually will help them to deploy their learning model
successfully.
Colors can be changed according to their role in
the simulation such as 1) Black: a leader of a coali-
tion; 2) White: an independent agent; 3) Other: color
of the coalition, as shown in Figure 3.
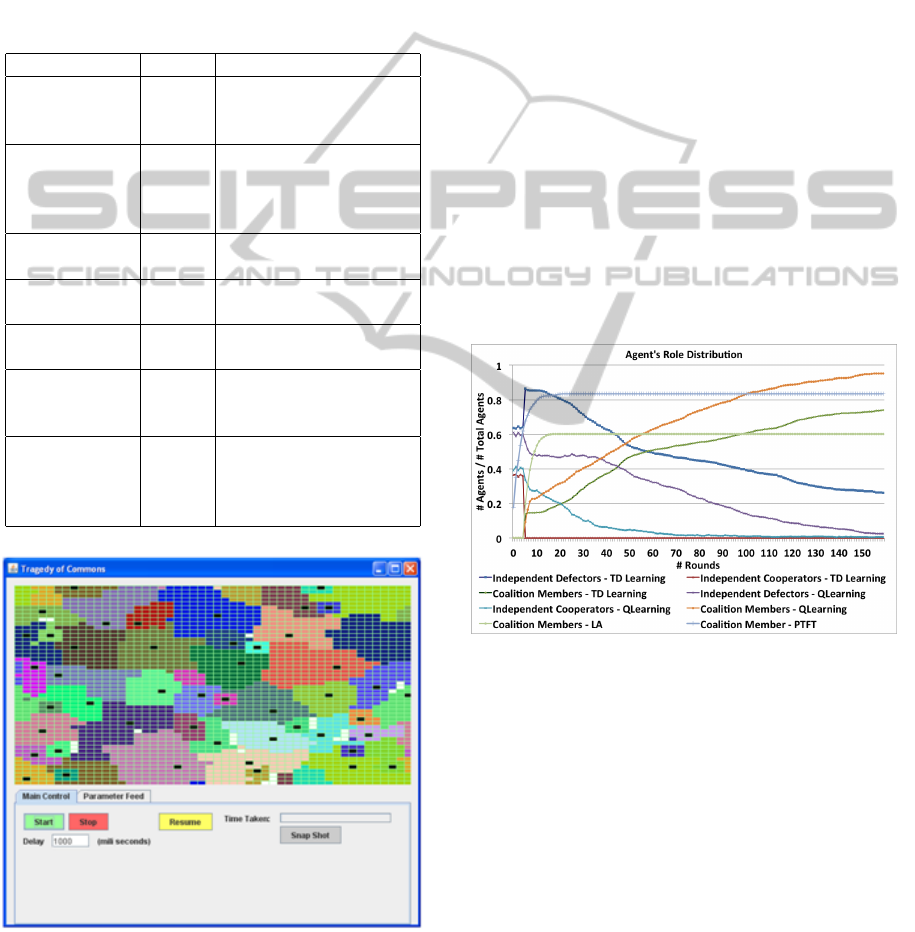
Initial parameter values of the simulation are de-
scribed in Table 1, and the initial simulation is shown
in Figure 3.
Table 1: Initial Parameter Values of the Simulation.
Parameter Value Description
Neighborhood
radius
1 An agent can play with
its immediate eight
neighboring agents.
Memory slots 10 An agent stores 10 re-
cent incidents happed
in the past with a neigh-
bor.
Learning rate
(β)
0.3 Learning rate of TDL
and QL.
Q-value range [5, 10] Range of initial Q-
values
Random play
rounds
5 During first five rounds,
agents play randomly.
Majority 0.8 80% of neighbors are
members of a same
coalition
Proportional
Threshold
0.7 The proportion of
current and proposed
coalition’s size is less
than 0.7
Figure 3: Memetic framework - Java applet.
6.1 Learning
Our experiments for the scenario are as described in
Section 5.1. As mentioned, initially all agents start
the game as independent agents. We compare our
results with two solutions proposed by (Burguillo-
Rial, 2009): Learning Automata (LA) and Probabilis-
tic Tit-For-Tat (PTFT).
6.1.1 Agent Role Distribution
Figure 4 shows the Agent’s Role Distribution
throughout the simulation, wherein independent co-
operators soon join a coalition and disappear, as in-
dependent agents, from the system. Moreover, the
number of coalition members increases with the num-
ber of rounds, and the number of independent defec-
tors decrease within the system. It is well to recall
that there is always a set number, 2, 500, of agents in
the system, but that coalition size varies. Once agents
have enough information and training for their perfor-
mance enhancement, TD Learning agents outperform
LA agents and Q-Learning agents outperform PTFT
agents.
Figure 4: Agent’s role distribution.
6.1.2 Agent Reward
In this section, we have collected and analyzed the
rewards collected by coalition members and leaders
over the life of the experiment.
Figure 5 depicts the percentage of the total reward
to the society, each agent type received. As shown in
the graph, the reward of leaders decreases due to the
decline in the number of coalitions, which in turn re-
duces the number of leaders in the society. Reward
percentages of member and independent agents in-
crease and decrease respectively, due to the respec-
tive rise and decline in their number. This figure also
confirms the results acquired for the previous Figure
4.
CoalitionFormationforSimulatingandAnalyzingIterativePrisoner'sDilemma
29
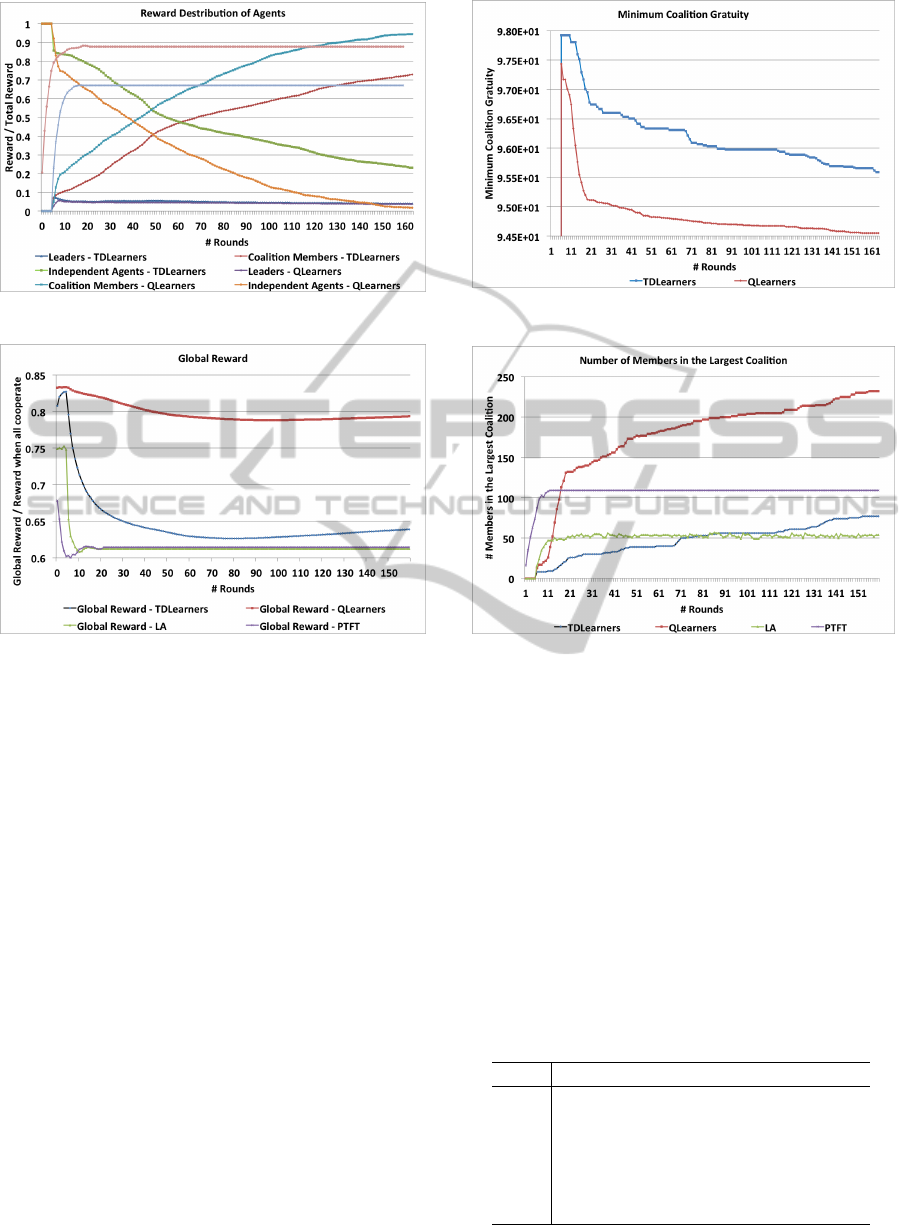
Figure 5: Reward distribution of agents.
Figure 6: Global reward.
Figure 6 shows what happens when the number of
agents in a coalition increases. The Global Reward
deceases initially due to the domination of indepen-
dent defectors and later increases due to the increase
in the number of member agents. Global reward is the
total number of rewards of all the agents in compari-
son to the maximum rewards gained if all the agents
cooperate with each other. As depicted, solutions LA
and PTFT need to be improved in order to cope with
a complex simulation that has several uncertainty fac-
tors: coalition join fee, power against others and se-
lection of the best coalition, that needs to be decided
based on agent’s local knowledge.
6.1.3 Coalition
Figure 7 shows that the joining-fee, paid by agents to
the leader of a coalition, decreases with each succes-
sive round because as the size of a coalition grows, it
can charge less to join. Minimum coalition joining-
fee helps the leader to expand its coalition size and
increases the chances of invasion by other coalitions
(i.e. force to merge). We did not include LA and
PTFT as joining-fee is not presented in (Burguillo-
Rial, 2009).
Figure 7: Minimum coalition joining-fee.
Figure 8: Number of members in the largest coalition.
Figure 8 shows that the number of members in-
side the largest coalition increases with the number
of rounds. This shows that over time, we have de-
creasing numbers of coalitions emerging as domi-
nant coalitions. Interestingly enough, dominant coali-
tions consist of an equal number of members. A
higher number of members in the coalition increase
its strength, there-by helping it to face defections suc-
cessfully. Both LA and PTFT reach their stability
level sooner, but those solutions are not able to im-
prove over the time for a better solution.
Table 2: Cooperators (C), Defectors (D), No. of Coalition
Members (CM), No. of Coalitions (NC), and No. of Mem-
bers in the Largest Coalition (NMLC) Vs. Neighborhood
Radius (NR).
NR C D CM NC NMLC
0.5 104 1554 818 24 71
1 5 49 2398 48 139
1.25 4 5 2446 45 171
1.75 0 4 2446 45 364
2 0 0 2459 41 377
3 0 0 2466 34 228
ICAART2015-InternationalConferenceonAgentsandArtificialIntelligence
30

Since, the agents who deploy the QL model out-
perform the agents who deploy TDL model, we fur-
ther analyze Q-learners by changing the neighbor-
hood radius and setting the learning rate to half (i.e.
β = 0.5). The results are shown as Table 2. As shown
in the table, agents (including leaders) prefer to act as
independent agents at the lower neighborhood radius
(NR = 0.5). Conversely, coalitions are much more sta-
ble (i.e. each coalition consists of the large number of
members) at the higher neighborhood radius (NR = 3)
although the number of coalitions is less.
7 CONCLUSION AND FUTURE
WORK
From the experiments performed, we conclude that
the heuristics applied in the simulation help in solving
the problem of the tragedy of commons (prisoner’s
dilemma) to some extent. With the increase in the
number of rounds, we identified an increase in the
number of member agents, and a corresponding de-
crease in the number of defector agents and indepen-
dent agents. Also, the coalitions with high performing
agents were more likely to survive during the execu-
tion of the game play.
The decrease in the joining fee of each coali-
tion through rounds increases the chances of coalition
growth (attracting more agents to join this coalition).
The temporal difference learning component helps in-
dividual agents join a stronger coalition and stay with
it.
Although, the temporal difference learning and
the Q-learning components applied here help in de-
termining the best possible strategy for an agent, Q-
learning outperforms temporal difference learning.
There are several opportunities for future work.
That of highest priority is to continue our experimen-
tal evaluation to understand the trust and reputation
models that change the agent’s behavior more realis-
tically. Also, studying and applying other reinforce-
ment learning techniques, like function approxima-
tion would be interesting. A comparative analysis of
these different learning models could prove fruitful.
Our secondary concern is to explore the effect of a
dynamic environment, in which the agent is not con-
sidered as static. It can disappear and reappear from
the system during the execution. We would like to
come up with techniques and algorithms that make
the agent organization robust against failures after be-
ing introduced to the dynamic environment.
Our third concern is to integrate the ideas of
cheaters and indirect reciprocity to our simulation for
a better understanding of the coalition formation and
overall behavior of the agent society.
The author expresses gratitude toward Kalyan
Mekala and Vicki Allan for cooperative work along
the years. Additionally, the author thanks anonymous
reviews for their helpful comments.
REFERENCES
Aunger, R. (2000). Darwinzing Culture: The Status of
Memetics as a Science. Oxford University Press.
Axelrod, R. (1995). Building New Political Actors: A model
for the Emergence of New Political Actors. Artificial
Societies: The Computer Simulation of Social Life.
London: University College Press.
Burguillo-Rial, J. C. (2009). A memetic framework for
describing and simulating spatial prisoner’s dilemma
with coalition formation. In The 8th International
Conference on Autonomous Agents and Multiagent
Systems, Budapest, Hungary.
Gotts, N. M., Polhill, J. G., and Law, A. N. R. (2003).
Agent-based simulation in the study of social dilem-
mas. Artif. Intell. Rev., 19(1):3–92.
Griffiths, N. (2008). Tags and image scoring for robust co-
operation. In Padgham, Parkes, Mller, and Parsons,
editors, Proc. of 7th Int. Conf. on Autonomous Agents
and Multiagent Systems (AAMAS 2008), pages 575–
582, Estoril, Portugal.
Hardin, G. (1968). The tragedy of the commons. Science,
162:1243–1248.
Leng, J., Sathyaraj, B., and Jain, L. (2008). Temporal dif-
ference learning and simulated annealing for optimal
control: A case study. In Agent and Multi-Agent Sys-
tems: Technologies and Applications, volume 4953,
pages 495–504.
Nowak, M. A. and Sigmund, K. (1998). Evolution of indi-
rect reciprocity by image scoring. Nature, 393:573–
577.
Riolo, R. L., Cohen, M. D., and Axelrod, R. (2001). Evo-
lution of cooperation without reciprocity. Nature,
414:441–443.
Smith, J. M. and Prince, G. R. (1973). The logic of animal
conflict. Nature, 246:15–18.
Watkins, C. and Dayan, P. (1992). Technical note: Q-
learning. Machine Learning, 8(3-4):279–292.
CoalitionFormationforSimulatingandAnalyzingIterativePrisoner'sDilemma
31
