
Modelling Capability and Affordance as Properties of
Human/Machine Resource Systems
Vaughan Michell
1
and Ella Roubtsova
2
1
Informatics Research Centre, Henley Business School, University of Reading, U.K.
2
Open University of the Netherlands, Heerlen, the Netherlands
v.a.michell@reading.ac.uk, Ella.Routsova@ou.nl
Keywords: Capability, Affordance, CPN, Critical Affordance Factor, Affordance Mechanism, Affordance Path,
Affordance Chain.
Abstract: Understanding how and why the capability of one set of business resources, its structural arrangements and
mechanisms compared to another works can provide competitive advantage in terms of new business
processes and product and service development. However, most business models of capability are
descriptive and lack formal modelling language to qualitatively and quantifiably compare capabilities,
Gibson’s theory of affordance, the potential for action, provides a formal basis for a more robust and
quantitative model, but most formal affordance models are complex and abstract and lack support for real-
world applications. We aim to understand the ‘how’ and ‘why’ of business capability, by developing a
quantitative and qualitative model that underpins earlier work on Capability-Affordance Modelling – CAM.
This paper integrates an affordance based capability model and the formalism of Coloured Petri Nets to
develop a simulation model. Using the model, we show how capability depends on the space time path of
interacting resources, the mechanism of transition and specific critical affordance factors relating to the
values of the variables for resources, people and physical objects. We show how the model can identify the
capabilities of resources to enable the capability to inject a drug and anaesthetise a patient.
1 INTRODUCTION
Capability is complex, with wide variations in
meaning and evaluation. Capability can refer to the
human action ability to do something, (Prahalad and
Hamel, 1990) (Gallouj and Weinstein, 1997).
Capability also refers to an object’s abilities
(Beimborn et al, 2005) and the ability of groups of
resources to perform a task (Grant, 1991) via a
process (Makadok, 2001). Capability relates both to
tangible visible transformations, (eg manufacturing
an object) and intangible transformations, eg
teaching, where information is transferred and tacit
knowledge is created (Michell, 2013). The ability to
transform resources is the basis of business
competitive advantage, where the product resources
have greater monetary value than the input resources
and cost of work done.
1.1 Paper Objectives and Layout
Our focus is: modelling the capability of a system of
business resources to identify how and why it is able
to meet a specific capability goal. Such a model
enables comparison/selection of the best system of
resources for a specific task (Michell, 2012). It also
aids understanding the resource properties and
dispositions required for a capability-affordance
system to achieve a goal. The paper is in 6 sections.
Section 2 Introduces affordance and effectivity to
formalise the capability model. Section 3 reviews
formal affordance models and their shortcomings in
relation to capability affordance modelling. Section
4 develops a proposed model for capability analysis
using CPN. Section 5 provides an example
application of the model. Section 6/7 discusses the
use and benefits of the model and our conclusions.
74
Michell V. and Roubtsova E.
Modelling Capability and Affordance as Properties of Human/Machine Resource Systems.
DOI: 10.5220/0005424500740083
In Proceedings of the Fourth International Symposium on Business Modeling and Software Design (BMSD 2014), pages 74-83
ISBN: 978-989-758-032-1
Copyright
c
2014 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

1.2 Definitions
Table1: Definitions.
1.3 Capability
A Capability results from transformation
interactions between two or more resources that
achieve a business goal, typically to increase the
business value of the transformed resources with
respect to a business client. Business capability is
the potential for action to achieve a goal G via an
action/series of actions in a process P resulting from
the interaction of 2 or more resources, in a
transformation that produces business value for a
customer. (Michell, 2011). For example, resources
R1 and R2 in state s1 and s2 interact in the
transformation and produce a new state of the
system which matches the goal state requirements G
and in which R1/R2 may be different. The resources
may be combined into a third resource (an input
resource is consumed/combined) or R1 and R2
remain, but the physical states or R1 and R2 are
changed. Capability represents the potential of a
system of input resources being able to effect a
transformation to meet a goal state G and a
corresponding system of output resources. For
example, a laboratory technician mixing two drugs
with a goal to form a new drug, or two doctors
discussing a diagnosis. In both cases energy has
been expended and a physical state change has
occurred. In case 1, two drugs have been mixed to
create a different drug R3, but R1 the drug mixer
remains, but in a different state – having the
transformation experience. In case 2 information has
been passed between clinicians altering their states,
i.e. perceptions and memory (biochemistry/ memory
state change) R1 to R1’ and R2 to R2’). Both
transformations add ‘value’ to the process; a new
higher value drug is formed or a patient diagnosis is
understood. For the transformation to occur at least
one resource must be ‘active’ and capable of
exerting forces and energy via some form of
‘mechanism’ to transform the other resource. It may
be a human or autonomous machine. Other
resources may be passive, e.g. drugs, materials etc or
also active – another agent or machine. We seek to
identify what are the properties of the interacting
resources that enable this capability.
Figure 1: High Level Capability Model.
2 AFFORDANCE / EFFECTIVITY
2.1 Affordance as Environment Ability
Gibson (Gibson, 1979) defined affordance as’ the
‘property that the environment or physical system
offered the animal to enable a possible useful
transformation for the benefit of the animal’
(Greeno, 1994) Gibson saw affordances as object
properties that could be perceived as well as intrinsic
properties of the way the object was – its
disposition. Affordance represents opportunity for
potential action by– visualising what an object can
do. Affordance also represents the interaction
relationship between the animal and its environment,
Gibson’s ecological approach identifies action as a
result of what the animal or agent can do.
Affordances refer to descriptions of (verb-noun)
object abilities such as a road is ‘walkonable’ or the
‘cup affords drinking’ (Gibson, 1979) indicating that
the structure/disposition of a road or cup enables it
to be walked on or drunk from. Affordance is the
‘relational’ property of the agent environment
system that provides the potential for interaction and
transformation. It focuses on the possibilities of how
the object could be used by the animal or person.
However, the animal must also have an ability to use
the object and have the correct disposition of
properties; otherwise no useful interaction can take
place.
Environment E A business environment E comprises a set of {resources Ri} . The set
of resources {Ri} have perceivable features whose value at any point
is called a dis
p
osition
Agent An agent resource is a resource object that can perceive its own
environment through sensors and acts on the environment
according to their self-motivations through effectors. (eg human or
autonomous machine)
Active/Passive
Resources
Active resources eg a nurse, are capable of exerting a change of
state on other object resources in a transformation (note driving
resources must be active resources) and have a disposition q.
Passive resources require other agents to realise their capability ie
they are inert and not ca pabl e of thei r own motion or cha nge of
state and have a disposition p (eg a syringe).
Acti on An action i s a di s crete phys i ca l trans formati on event between
active and passive resources that can change the state of a system
of resources in an environment to a desired goal state G.
Activity
(res ource
transforma tion
action)
Physical State 2 (Goal)
Business Benefit Value V’ (££££ > V)
Physical State 1
Business Benefit Value V (££)
Resource
R1
Resource
R2 etc
Resource
R1’
Resource
R2’ etc
Capability Cv = f (resources, process of interaction)
Output Resources
Input Resources
Resource Interaction?
Resource Properties?
Modelling Capability and Affordance as Properties of Human/Machine Resource Systems
75

2.2
E
Shaw (
G
ability o
animal’
s
ability
o
p
roperti
e
‘capabil
i
transfor
m
effectivi
t
animal’
effectivi
t
meet th
e
think of
human
features
F
i
2.3
T
The dis
p
compli
m
affordan
transfor
m
effectivi
t
cannot
e
2010).
F
syringe,
and the
moving
fingers,
the obj
e
effectivi
t
be held
i
p
roperty
also ha
v
p
roperti
e
affordan
a drivi
n
comple
m
E
ffectivit
y
a
G
reeno, 199
4
r disposition,
s
disposition
a
o
f the animal
e
s of the o
i
ty of the a
n
m
ation. Wel
l
t
y relates to
and its po
s
t
y; ‘can walk
’
e
goal of wal
k
effectivity as
potential f
u
that enable t
h
i
gure 2: Afford
a
T
he Afford
a
p
osition of t
h
m
en
t
the di
s
n
ce, in or
d
m
ation to tak
t
y dual refer
s
e
xist without
t
F
or example
a person’s h
a
fingers must
and slipping
sufficient to
e
ct. These a
r
t
y in graspin
g
i
n a hand it
m
y
), must not b
e
v
e places tha
t
e
s of the
n
ce-effectivity
n
g agent to
m
ent an obje
c
a
s Animal
C
4
) identified
mus
t
b
e co
m
a
nd ability.
S
to complim
e
bject as ‘e
f
n
imal’ to us
e
l
s (Lenarcic,
‘the functi
o
s
sible move
m
’
, refers to th
e
k
ing (Kim et
a
the driving a
g
u
nctional ch
a
h
em to effect
a
a
nce-Effectivit
y
a
nce-effect
h
e animal, its
s
position of
d
er for an
e place. The
s
to the co
m
t
he other (Or
t
to hold an
a
nds must fit
be in a posi
by applyi
n
lift and hold
,
r
e properties
g
the object.
m
ust fit inside
e
too heavy o
r
t
the fingers
c
object’s
a
dual refers t
o
configure (
d
c
t’s configur
a
C
apabilit
y
that environ
m
m
plimentary t
o
S
haw defined
nt the afford
a
f
fectivity’ ie
e
the object
i
2007) sug
g
o
nal state of
m
ents. Henc
e
e
human abili
t
a
l, 2010). W
e
g
ent ability o
r
a
racteristics
a
transformati
o
y
of ‘Grasp’.
ivit
y
Dual
effectivity,
m
the object;
interaction
term afford
a
m
plement and
t
mann and K
u
object, suc
h
around the o
b
t
ion to preve
n
n
g forces via
but not to c
of the pers
For the obje
c
the hand (vol
r
slippery, It
m
c
an grip on
t
a
ffordance.
o
the capabili
t
d
ispose) itsel
f
a
tion (disposi
t
m
ent
o
the
this
a
nce
the
in a
g
ests
f
the
e
an
t
y to
e
can
r
the
and
o
n.
m
ust
its
or
a
nce-
one
K
uhn,
h
as
b
ject
e
nt it
a
the
c
rush
s
ons’
c
t to
l
ume
m
ust
t
o, –
The
t
y of
f to
t
ion)
to
a
ag
e
siz
e
ref
e
fea
t
val
u
p
oi
n
ne
e
de
fi
an
d
mo
d
li
m
3
3.
1
Tu
r
eff
e
ref
e
p
o
s
p
la
n
Tu
r
Z
en
v
dis
p
wh
i
de
fi
all
ma
k
dis
p
the
dis
p
int
e
an
i
alo
n
Sto
an
d
for
hig
h
b
et
w
for
m
(M
a
int
e
cli
m
hei
g
cla
s
rati
on
e
ob
s
a
chieve a tran
s
e
nt refers to f
i
e
of hand et
c
e
rs to its size
,
t
ures etc. T
h
u
es of the c
o
n
t of intera
e
ded to en
a
fi
nitions for
c
d
their disposi
t
The next se
c
d
els of aff
o
itations that
m
AFFOR
D
1
Turve
y
r
vey modelle
d
e
ctivity oppor
t
e
r to an ani
m
s
sible (its c
a
n
ned action t
o
r
vey’s affo
r
d
a
and
p
ropert
i
v
ironment (T
u
p
osition or ar
r
i
ch a compli
m
fi
ned the juxt
a
the possible
k
e the intera
c
p
osition) is ‘
s
environmen
t
p
osition of
t
e
raction the a
n
i
nteraction pr
o
n
e.
W
ffregen (Sto
ff
d
identified t
h
affordance t
o
h
lights the n
w
een the int
e
m
the basis
a
rk, 1987) i
d
e
racting objec
m
b-ability of
s
g
ht to leg le
n
s
sifications
o
o. Howeve
r
,
n
e
ratio as
M
s
erved in th
e
s
formation. T
h
nger and for
c
c
. The confi
g
weight, slip
p
h
e dispositio
n
o
nfiguration
o
c
tion. A m
a
a
ble quantit
a
c
omparison a
n
t
ions.
tion briefly
d
o
rdance and
m
otivate this
p
D
ANCE
M
et al.
d
p
ossible a
c
t
unities, as ‘p
r
m
al perceivin
g
a
pability) an
d
o
meet the g
o
a
nce model re
l
i
es of othe
r
u
rvey, 1992).
T
r
angement q
e
m
entary disp
o
a
posi
t
ion fun
c
dispositions
tion Wpq
p
o
s
s
aid to be an
t
X’ and ‘q
i
t
he animal
Z
n
imal-enviro
n
o
perty r, whi
c
W
pq = j(Xp,Z
q
f
regen, 2003)
h
e need for s
p
o
be possible
e
ed for a sp
a
e
racting agen
t
of our mod
e
d
entified that
t
s is importa
n
s
tairs depend
e
gth (Warren,
o
f affordance
n
ot all afford
a
M
antel et al
e
ir study of
he configurat
i
c
e location,
m
g
uration of t
h
p
eriness, fun
c
n
is a speci
f
of object/ag
e
a
thematical
m
a
tive and
q
n
d use of c
a
d
escribes mat
h
effectivity
a
p
aper.
M
ODELS
ctions, or a
f
rospective co
n
g
whether an
d
its contro
o
al of using t
h
l
ated animal
p
e
r entities
X
The specific
a
enables it to
j
osition p. T
u
c
tion j as the
X and Z
p
o
s
s
sible. So p (
t
affordance
a
is the comp
l
Z’. At the
n
ment interfa
c
c
h is a
p
roper
t
q
)
)
developed t
h
p
atio-tempor
a
(Lenarcic, 2
0
a
ce-time pat
h
t
-object reso
u
e
l. Warren a
n
the geomet
r
n
t in affordan
c
e
d on the rat
i
1984). This
s
e
by a dim
e
a
nces can be r
e
(Mantel et
a
f
action mo
d
i
on of the
m
agnitude,
h
e object
c
tions and
f
ic set of
e
nt at the
m
odel is
q
ualitative
a
pabilities
h
ematical
a
nd their
f
fordance-
n
trols’, to
action is
l of the
h
e object.
p
roperties
X
in an
a
nimal, Z
j
oin to X,
u
rvey has
subset of
s
sess that
t
he object
a
thing in
l
ementary
point of
c
e possess
t
y of Wpq
(1)
h
e model
a
l contact
0
11). This
h
to exist
u
rces that
n
d others
r
y of the
c
e, eg the
o of riser
s
uggeste
d
e
nsionless
e
duced to
a
l, 2012)
d
es, their
Fourth International Symposium on Business Modeling and Software Design
76

boundaries and degrees of freedom of interaction.
This highlights the need to consider a wider set of
critical factors that we refer to in our model.
Steedman (Steedman, 2002) used linear dynamic
event calculus to identify all the possible potential
action paths. However, it does not meet our need for
modelling the mechanism of action paths to a
specific goal. Brooks (Brooks, 1991) Sahin (Sahin
2007) and others have used affordance extensively
to develop ecological behaviour based control in
robotics, but this is out of scope of our work, which
is focused on human-device work interactions.
3.2 Lenarcic - Situation Theory
Lenarcic combined Barwise’ situation theory that
models the semantics of situations (individuals,
information, time, place) (Barwise and Perry 1980),
with Gibson's and Turvey’s affordance propositions.
Lenarcic’s situation theory model relates affordances
of a set A of objects in the logic (Lenarcic, 2011):
A = {Aatom, Aset, Astate, Asit, Aaff, Aind } (2)
Aatom is a set of relevant facts, eg nurse, grasp,
hold, syringe etc. Aset is the set of objects. Astate is
a set of assertions {w} that relates individual people
and objects as truth assertions w = {r, t1…tn, E} eg
<<in, nurse, room, 1>>, or ‘drug is in the syringe’:
<<in, drug, syringe, 1>>. Asit, situations, are sets of
relationships between states {w1,…,wn}. Aaff is a set
of affordances as a tuple {Φ, s, i}, Φ refers is the
action relating to the affordance, s refers to the
situation conditions, i is the individual capable of
affordance, eg Φ1 <<inject, injection situation,
nurse>> refers to the agent driving the affordance,
the action involved and the state conditions. Aind
are individuals with their; name, abilities or possible
actions eg inject, grasp and their niche or specific
action groups (Lenarcic, 2011). An ‘enacting
function’ representing the juxtaposition function,
for the affordance to be possible. Lenarcic’s model
defines a comprehensive algebra for affordances and
situations and their semantic relationships. However,
the model is complex and unwieldy for more than a
few interactions. It is mainly qualitative and hence
difficult to compare capabilities or the mechanism of
their interaction.
3.3 Affordance Model Developments
Kim et al (Kim et al., 2008) models affordance using
situation theory and finite state automata (FSA)
models at different levels of detail called grains. A
high level grain model represents a plan of action or
process and an atomic model of interaction that
provides a level of detail within the process that
relates to the CAM model. They define a 12 tuple
model for Matom:
=(
{
, ,
}
,
{
, ,
}
,,,
π
,,,)
(3)
Where the environment is X and human agent Z and
W the animal environment system (AES) (Lenarcic,
2011)]. P is the set of affordances, Q the set of
effectivities and PA the set of possible actions that
can take place. Kim et al include Pr a perceptual
predicate function to account for the fact that
affordance must be seen and understood in order to
use them. Other variables relate to Turvey’s
juxtaposition function J (the function combining
affordance and effectivity) and possible action
generation function pi and the goal or target action
ta. The tuple concludes with time function for the
process level (delta) and the atomic level timing of
the affordance-effectivity interaction. Kim et al
provide useful examples of the application of the
model to a coin in a slot machine and catching a
ball. LTL enables notional separation of affordance
p and affectivity q (Lenarcic, 2011). However,
Kim’s 12 sets of variables make it unwieldy in
modelling situations where we wish to compare
affordances at a higher level of capability, ie several
actions. Also it is not easy to model and specify p
and q explicitly and intuitively, partly because p and
q are related by the juxtaposition function J which is
not easily elaborated.
3.4 The Capability-affordance Model
Our model identifies capability as a property of any
resource combination animal-animal animal-
machine, machine–machine (Michell, 2011). This
enables both business capability to be modelled as
well as the capability of interacting resources
without human intervention eg chemical reactions
(necessary as part of industrial processes).
Capability requires affordance-effectivity
interactions to take place. We take a Gibsonian
stance, but unlike Gibson’s pure affordance, which
relates to possibilities of any resource interactions
happening, we are concerned with how and why
useful business interactions can happen. Hence goals
will be specific to those adding value. Our focus is
on determining the conditions and resource
specifications for which a specific capability is
possible. We illustrate this with the example
‘injecting a drug’ in a clinical process. Using Gibson
and Turvey, we decomposed the affordance-
effectivity disposition or possibility for action
(Lenarcic, 2011) into (i) a space-time or path
Modelling Capability and Affordance as Properties of Human/Machine Resource Systems
77

disposition and (ii) a mechanism disposition
(Michell, 2012). At the point of transition Turvey’s
juxtaposition function J must be represented by both
a path and a mechanism, both meet critical
affordance factor values that make the state
transition possible. The capability of a system of
agents and objects is the sum of all the affordance-
effectivity interactions within the system. This is
equivalent to W, the AES- animal in environment
system in Kim (Kim et al., 2008). The affordance-
effectivity interactions are part of a process where
paths represent the what Kim calls ‘high grain’
interactions and affordance chains represent parts of
agents or objects eg syringe components such as the
plunger and the barrel interacting.
3.4.1 Affordance Path
The affordance path relates to the space-time
affordance-effectivity dual interaction requirements
that if the agent and object don’t spatially come into
contact or a region of influence with each other,
affordance won’t occur (Lenarcic, 2011). Hence part
of the animal disposition q and the object disposition
p conditions must relate to space-time rules
regarding the contact/interaction geometry between
object and animal. In the syringe example, the
syringe position and orientation (p variables) must
match the hand/finger positions (q variables). If the
structural spatial arrangement or disposition of the
interacting resources do not complement each other,
the interaction and capability will not be present, ie
if the syringe is too big to fit in the hand or lacks
grip and leverage points.
An affordance path AP is the set of possible
space-time movement and geometric configuration
conditions that must exist to enable the affordance
mechanisms to act and execute the capability.
(adapted from Michell, 2012) At the interaction
point between resources, the space time path of
animal and object must be the same. Movement and
dynamics of the agent in its previous states must be
such that it leads to the special agent spatial
disposition q which matches the special spatial
disposition of the object p at time t of
transformation. This becomes a more difficult
problem of kinematics when both animal and object
are moving and the geometry changes, as in Kim’s
ball catching example (Kim et al., 2010).
3.4.2 Affordance Mechanism
Having the right spatial disposition alone is not
enough. There must be an energy and interaction
mechanism to get the resources into contact and to
enable the desired cause and effect. For the syringe
to be gripped, the hand must exert force on it
through the fingers to prevent slipping and crushing.
The use of forces in this case is the ‘mechanism’ or
what enables the transformation – to hold the
syringe. The affordance transformation mechanism
refers to the laws of nature that must hold for the
cause and effect interaction between the resources to
take place. The most common mechanism in
substantive interactions is force, supplied by an
animal or machine agent. The affordance mechanism
is the cause and effect transformation at the
interface between the two or more interacting
resources and its properties that enable the
transformation (adapted from Michell 2013).
Mechanism refers to the behaviour and
properties of the energy transfer that drives the
transformation eg human energy, chemical,
electrical etc. This fits with Gibson’s ecological
approach. Other mechanisms exist. Chemical
mechanisms, enable a substance eg sugar to
dissolve in a fluid, if the sugar has appropriate
properties ie sufficient surface area and if the sugar’s
bonds can be broken by a fluid such as water. This
represents an object-object transformation between
the water and sugar. The mechanism of electric
induction depends on the properties of a wire and
electromagnetic field and enables an electric current
to appear in a wire. This mechanism is necessary for
affordance and capability of an electric motor ie a
motor affords rotation. Without it the motor has no
capability or affordance. Mechanisms are not
confined to substantive actions, but include human
cognition sense making – or semiosis (Stamper and
Liu 1994). The mechanism for the nurse holding the
syringe includes the need to perceive the situation
(position of the syringe) and the affordance of the
object (can the syringe be held – how big/heavy is it,
will it fit?). Holding the syringe ‘to give an
injection’ requires different knowledge and skill
(repeated affordance experience) than a simple grasp
(Andre, 2011) to actualise the affordance–effectivity
action of ‘inject’. Hence mechanisms should ideally
include cognitive resources in terms of ‘know what,
how and why’ that enable the agent to make
intelligent decisions to enable the resources to
interact. The complete capability model should
include perception, cognitive behaviours (Michell,
2013) and capability mechanisms that will affect
whether the animal is able to a) perceive and b)
understand and bring the resources appropriately
together with the right disposition to enable the path
and mechanism to effect transformation. For space
reasons we only include a brief perception example.
Fourth International Symposium on Business Modeling and Software Design
78

3.4.3
C
In both
p
critical
function
s
enable i
n
effectiv
e
those d
e
values
transfor
m
have cr
i
affordan
to the
dispositi
values
o
syringe
force (i
e
the sy
r
location
/
can be
h
with Ki
Identific
ranges
compari
n
the capa
b
and pr
o
p
erform
a
3.4.4
A
For des
i
affordan
interact
i
2012).
F
needle
a
b
arrel.
T
the plun
g
– eg int
o
injectio
n
2012), t
h
affordan
chain al
manipul
a
an exten
interacti
o
interfac
e
interact
i
same ti
m
to a ti
m
to
g
ethe
r
eg the c
a
C
ritical Affo
p
ath and me
c
values of t
h
s that define
n
teraction. T
h
e
ly encompa
s
e
fined by W
a
that will a
f
m
ation occur
r
i
tical values
n
ce factors, C
A
values and/
o
on of both
o
o
f p and q i
n
example the
y
e
critical mec
r
inge with
o
/
position of fi
h
eld (critical
p
i
m’s conditi
o
ation of criti
c
are import
a
n
g existing c
a
a
bility to exis
t
o
ducts to
m
a
nce goals.
A
ffordance
P
i
gned objects
n
ces for the in
t
i
n unison in
a
F
o
r
example,
a
nd plunge
r
w
T
he action of
g
er pushing t
h
o
a patient.
W
n
of a drug’. I
n
h
e parts are l
o
n
ce/effectivity
so occurs w
h
a
ting objects,
sion of the p
e
o
ns at ob
j
e
s. An affor
d
i
on betwee
n
m
e. In contr
a
m
e sequence
r
produce th
e
a
pability of in
j
rdance Fac
t
c
hanism there
h
e variables
the path an
d
h
ese critical
a
s
s any critic
a
a
rren, 1984)
f
fect the p
o
r
ing. We defi
n
attached to
A
F (Michell,
2
o
r range of
o
bject and a
g
n
Turvey’s n
o
y
might refe
r
hanism valu
e
o
ut crushin
g
ngers within
w
p
ath values).
T
o
ns – C (Ki
m
c
al affordanc
e
a
nt for bo
t
a
pabilities an
d
t
and in desi
g
m
eet new
P
ath and C
h
, to work, a
t
eracting co
m
a
n ‘affordanc
e
a syringe
h
w
ith a seal t
h
pressing the
p
h
e air or flui
d
W
e can say th
e
n
an affordan
c
o
cke
d
togethe
r
properties.
h
en an agen
t
ie the objec
t
e
rson’s hand
d
j
ec
t
-hand a
n
d
ance chain
n
affordance
a
st the afford
of related
a
e
conditions
j
ecting a
p
ati
e
t
or
is a linked s
e
relating to
mechanism.
a
ffordance v
a
a
l ratios (suc
h
and other f
a
o
ssibility of
n
e the factors
the
m
as cri
2
012). CAFs
r
values for
ent to intera
c
o
tation. So i
n
r
to the rang
e
s) values to
h
g
it and
w
hich the sy
r
T
his is analo
g
m
et al., 2
0
e
factors and
t
t
h quantitati
d
requirement
s
ning new de
v
capabilities
h
ain
sequential s
e
m
ponents, nee
d
e
chain’ (Mic
h
h
as a barrel
h
a
t
fits insid
e
p
lunger resul
t
d
out of the b
a
e
‘syringe af
f
c
e chain (Mic
h
r
by virtue of
t
An afford
a
is holding
t
or tool bec
o
d
ue to the cha
i
n
d objec
t
-o
b
is a conti
gu
s
actin
g
at
a
nce path r
e
a
ffordances
for a capab
i
e
nt.
e
t of
the
that
a
lues
h
as
a
cto
r
the
that
i
tical
r
efer
the
c
t ie
n
the
e of
hold
the
r
inge
g
ous
0
08).
t
heir
i
vely
s
for
v
ices
and
e
t of
d
s to
hell,
and
e
the
t
s in
a
rrel
f
ords
hell,
t
heir
a
nce
and
o
mes
i
n of
b
ject
u
ous
the
e
fers
that
i
lity,
3.
4
Ot
h
aff
o
eff
e
vol
u
on
t
ad
d
tha
t
tra
n
3.
4
W
e
lev
e
an
d
eff
e
At
t
me
c
fun
the
eff
e
the
p
o
s
tra
n
sp
a
syr
i
ma
t
me
c
(bi
o
the
the
sh
a
fac
t
me
c
aff
o
(se
e
4
4.
1
Ba
s
sh
o
.5 Resourc
e
h
er properties
o
rdance-effec
t
e
ctively it n
e
u
me of fluid
/
t
he position o
d
itional neces
s
t
enable
s
n
sformations.
Figure 3:
R
.6 Relatio
n
e
model the
c
e
ls of Kim’s
g
d
resources a
n
e
ctivity and d
i
t
he point of a
f
c
hanism and
ction. The pa
t
juxtapositi
o
e
ctivity dual
t
need for o
b
s
ition and sp
n
sition. Both
tial conditio
n
i
nge position
t
ch the hand
/
c
hanism r
e
o
mechanical,
transition or
juxtaposition
re mechanis
m
t
ors refer t
o
c
hanism an
d
o
rdance-effec
t
e
Capability-
A
CAPAB
I
1
Model
R
s
ed on the pre
o
uld enable;
e
Propertie
s
of object an
d
t
ivity. For t
h
e
eds some ki
n
/
d
r
ug inside
i
f
the plunger
o
s
ary resource
p
the
R
esource Prope
r
n
ship to Oth
e
c
apability aff
o
g
rains, proce
s
n
d atomic le
v
i
sposition det
a
f
fo
r
dance-eff
e
path relate
t
h represents
t
o
n function
o work. Typi
c
bj
ec
t
s to be
t
ecific orient
a
the object
a
n
s. In the
and orientat
i
/
finger
p
ositi
o
e
presents
t
chemical, ele
change in ph
y
point. Both t
h
m
conditions.
T
o
the variab
l
d
their ra
n
t
ivity and he
n
A
ffordance M
o
I
LITY SI
M
R
equireme
n
v
ious discuss
i
s
d
agent are re
q
h
e syringe to
n
d of scale s
o
i
t is known
d
on the scale.
T
p
roperty of t
h
affordance-
e
r
ties for a Syri
n
er Models
fo
rdance mod
e
s
s level for t
h
v
el for the a
f
ails (Kim et
a
e
ctivity inter
a
to the jux
t
the space ti
m
for the a
f
cally, this wi
l
t
ouching, in
a
tions neede
d
a
nd agent s
h
syringe exa
m
i
on (p variab
o
ns (q varia
b
t
he action
e
ctrical) etc t
h
ysical state t
o
h
e object and
T
he critical a
l
es of the
p
n
ge values
n
ce capabilit
y
odel (CAM)
M
ULATI
O
nts
ion, a capabil
q
uired for
be used
o
that the
d
epending
T
his is an
h
e syringe
e
ffectivity
n
ge.
e
l at two
h
e actions
ff
ordance-
a
l., 2008).
a
ction, the
t
aposition
e rules of
ff
ordance-
l
l involve
the same
d
for the
h
are path
m
ple the
l
es) must
b
les). The
forces
h
at enable
o
occur at
the agent
f
fordance
p
ath and
for the
y
to work.
b
elow).
O
N
i
ty model
Modelling Capability and Affordance as Properties of Human/Machine Resource Systems
79

a) mod
e
a busine
state; re
p
their fu
n
transitio
n
b) repr
e
function
s
transitio
n
c) mod
e
level (t
h
relation
s
d) The
m
the pro
c
capabili
t
all logic
simulati
o
and rule
tradition
Kim an
d
Petri Ne
model a
the con
d
visible.
T
system
a
why an
d
visible
a
later th
e
guards
affordan
with th
describe
d
and sim
p
Fig
u
Resourc
e
Affo
r
Mec
(
A
e
lling of Aff
o
ss process le
v
p
resentation
o
n
ctions at ato
m
n
s on the pat
h
e
sentation of
t
s, at atomi
c
n
s on the pat
h
e
lling of criti
c
h
e values and
s
hip to path a
n
model shoul
d
c
ess and the
t
y without ex
c
al or mathe
m
o
n type mod
e
s is required.
n
al BPMN pr
o
d
Lenarcic's
e
ts (Jensen, 1
9
a
ctivities, stat
e
d
itions necess
T
hese conditi
o
a
nalysis. Giv
e
d
how of capa
b
a
s guards of
C
e
critical af
f
are great
n
ce models.
O
e Capabilit
y
d
earlier that
a
p
lify the mod
e
u
re 4: Capabili
t
Activity
a
e
Ri
Affordan
c
Effectivity
D
Actio n
Tra ns form
a
Affordance
C
r
dance
hanism
A
M)
Critical Affordance
F
P
r
A
t
Juxtaposition F
o
rdance Paths
v
el from initi
a
o
f affordance
m
ic level, w
h
h
s.
t
he Mechanis
m
c
level, wh
i
h
s.
c
al affordanc
e
ranges of th
e
n
d mechanis
m
d
show a nu
m
atomic leve
l
c
ess complex
i
m
atical constr
a
e
ling langua
g
Requiremen
t
o
cess models
a
approach.
H
9
97) have be
e
e
s and proce
s
ary for alter
n
o
ns are impo
r
e
n our focus
b
ility we pro
p
C
PN transiti
o
f
ordance fact
tools for
s
O
ur approac
h
y
Affordance
a
llows us to
a
e
l.
t
y-Affordance
M
Process
a
Resource Ri+
1
c
e-
D
ual
a
tion
C
hain
Affordance Pat h
Affordanc e
Path
(AP)
F
actors (CAF)
r
ocess Level
t
omic Level
unction
(process lev
e
a
l state to the
path/position
h
ich characte
r
m
/Force and
t
i
ch characte
r
e
factors at at
o
e
ir variables)
m
functions.
m
ber of actio
n
l
that suppo
r
i
ty. The abov
e
a
ints and he
n
g
e with func
t
t
s b), c)) rul
e
a
nd a),d) rule
s
H
owever, Col
o
e
n widely us
e
s
ses. CPN m
a
n
ative afforda
n
t
ant for capa
b
on modellin
g
p
ose making
t
ns. As we s
o
rs presente
d
s
implification
h
combines
C
Model (C
A
a
bstract transi
t
M
odel (CAM).
Activity b
1
e
l) at
goal
and
r
ises
t
heir
r
ises
o
mic
and
n
s at
r
ts a
e
are
n
ce a
t
ions
e
out
s
out
ored
e
d to
akes
n
ces
b
ility
g
the
t
hem
s
how
d
as
of
C
PN
A
M)
t
ions
4.
2
Co
l
Sta
h
for
not
i
co
m
wit
h
“c
o
hie
r
tup
l
- C
ex
a
Syr
i
Syr
i
rep
r
dis
p
an
d
dat
a
-P
b
y
bp.
-B
i
rep
r
ins
t
-V
i
-T
(Fi
g
de
n
-E
a
-I i
s
fro
m
ex
p
-g
i
fun
use
(sp
a
aff
o
-O
dir
e
lab
e
2
CPN a
n
l
oured Petri
N
h
l, 2007) pos
s
understandin
i
on of capa
b
m
bine advant
h
the expres
s
o
lors “(Jens
e
r
archical CP
N
l
e: CPN= (C,
B
is a finite set
a
mple, the col
s
i
nge=productS
y
i
ngeScale* Syr
i
r
esents type
s
p
ositions (var
d
variables a
r
a
types and v
a
is a finite se
t
ellipses (Fig
u
i
s a bag of to
k
r
esented nea
r
t
ances of reso
u
i
s a set of var
i
is a finite s
e
g
ure 5). Tra
n
n
oted by verb
s
a
ch transition
i
s
a finite set
o
m
a place p
p
ression of th
e
i
s a guard of
t
ction. By de
f
guards to
m
a
ce time an
o
rdance-effec
t
is a finite s
e
e
cted from th
e
lled with an
e
Figure 5: C
a
n
d Capabil
i
N
ets (Jensen,
1
s
ess all the ex
p
g
and possib
l
b
ility. Colou
r
a
ges of clas
s
s
ive power
o
e
n, 1997).
N
(net) witho
B
,V,P,T),
of colors (da
t
s
et:
y
ringeName*F
o
i
ngeopenScale
(
s
of variabl
e
i
ables) p and
r
e defined in
a
riables to rep
of places,
1
u
re 5). Each p
k
ens (values)
o
r
p
laces. We
u
rces.
i
ables of colo
r
e
t of transiti
o
n
sitions repr
e
s
.
i
s a tuple t= (
I
f input arcs.
A
to transition
e
color of plac
t
ransition t. E
a
f
ault each gu
a
m
odel the crit
i
d
mechanis
m
t
ivity dual.
e
t of output
a
e
transition t
o
e
xpression of
p
ability to Inje
c
i
t
y
1
997) (van de
x
pressive mea
n
l
e measurem
e
r
ed Petri Ne
t
s
ical Petri
N
o
f complex
d
An initiali
z
o
ut time sta
m
t
a types), ∈
o
rcePlunger*
F
(Fig 6.)
e
needed to
q of resourc
e
declarations
.
p
resent resour
c
1
,…, ∈
,
p
lace p posse
s
o
f colors ∈
C
use tokens
r
s ∈ .
o
ns depicted
b
e
sent actions
(I
, g,O):
A
n input arc i
s
t. An arc c
o
c
e p.
a
ch guard is
a
a
rd has value
i
cal affordan
c
m
) necessary
a
rcs. An out
p
o
a place p.
A
f
a place Colo
r
c
t a Drug Exa
m
r Aalst &
n
s needed
e
nt of the
t
s (CPN)
N
ets (PN)
d
ata types
ed non-
m
ps is a
. For
F
orceSlip*
describe
e
s. Colors
.
We use
c
e types.
depicted
s
ses a bag
C
to model
b
y boxes
and are
s
directed
ntains an
a
Boolean
true. We
c
e factors
for the
p
ut arc is
A
n arc is
r
.
m
ple.
Fourth International Symposium on Business Modeling and Software Design
80
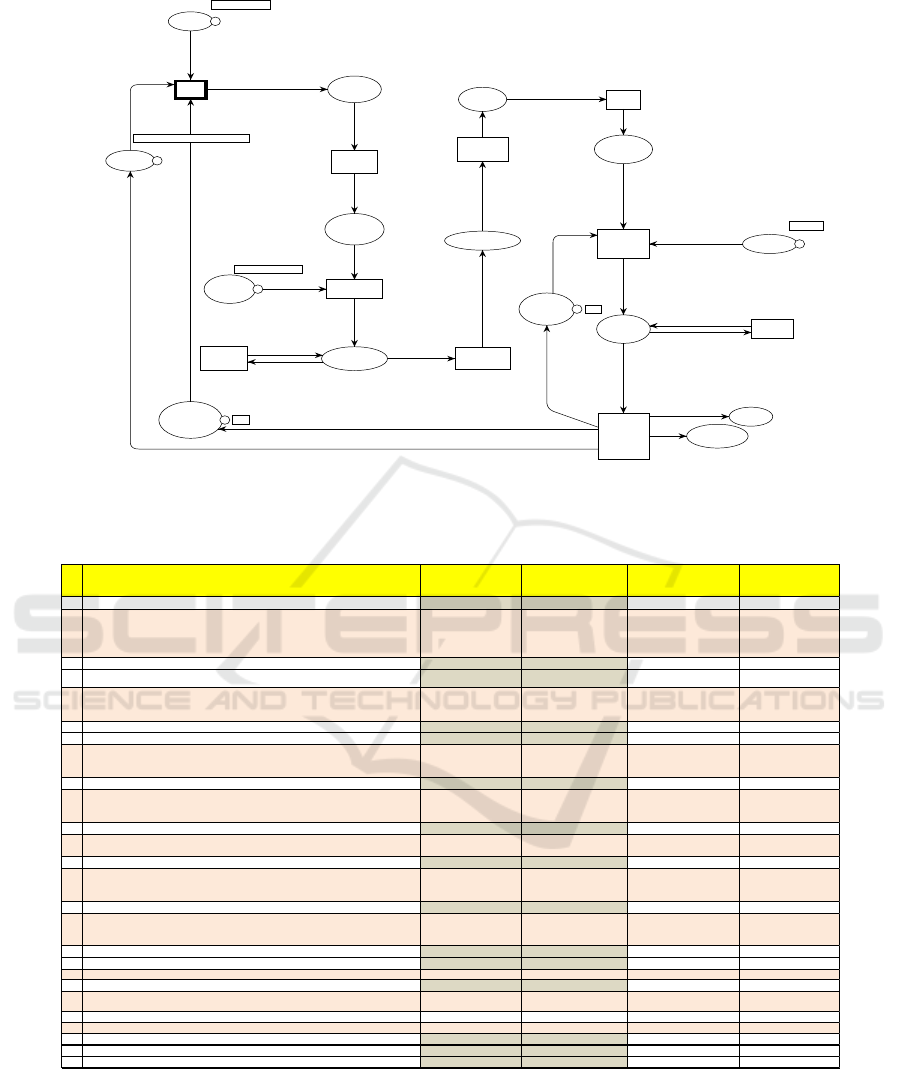
Figure 6: CPN model of Capability - Inject a Drug.
5 EXAMPLE APPLICATION
5.1 Injecting a Drug
Based on structured interviews conducted at a health
trust hospital (Michell, 2012) we model the
capability to inject a drug using a syringe. Resources
include an active resource; a nurse and patient
named Fred and passive object resources; a syringe,
ampoule containing a drug (eg Ketamine). The
capability to ‘inject the drug’ depends on a process
of actions with the correct disposition of resources to
Syringe -
Empty
Syringe
1` ("s",1,10,0,3)
Nurse -
Available
Nurse
1` ("n",true, 4, 4,grasp,perceives)
.Syringe
grasped by
Nurse NSGrasped
Syringe Ready
to draw up
NSGrasped
Ampoule C
with drug
ContainerDrug
1`("c","ketamine")
Syringe in
Ampoule
NSReadyDrugDraw
Syringe loaded
with drug
NSdloaded
Vein Found
NSdloaded
Patient
Ready
Patient
1` "Fred"
Syringe
Empty
Syringe
Patient
Injected
PatientInjected
Syringe
on vein
NSInjectPatient
Number of
Nurses to do
steps
of the process
Unit
()
Number
of patients
in the
process
Unit
()
Syringe
held t
o inject
NSdloaded
Grasp
- syringe
[fh>fs andalso fh < fc]
Push -
plunger
closed
[fsp>ForcePlunger]
Place syringe
in ampoule
[d="ketamine"]
Draw
up drug
[Ls<Lco]
remove syringe
from ampoule
[Ls =Lco]
Change grasp
to hold to
inject
Place
syringe
on vein
[pv=perceives]
Remove
Syringe
from
patient
[Ls=0]
Inject
[fsp>=ForcePlunger andalso Ls>0]
Find Vein
[pv=perceives]
(s,fs,fc,Ls,Lco)
(n,qn,fsp,fh,gp,pv)
((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco))
((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco))
((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco))
((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco))
(c,d)
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),(c,d))
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls+1,Lco)),(c,d))
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),(c,d))
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),d)
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),d)
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),d)
pat
(pat,d)
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),(c,d))
((((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),d),pat)
((((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),d),pat)
((((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls-1,Lco)),d),pat)
(s,fs,fc,Ls,Lco)
((((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),d),pat)
()
()
()
()
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),d)
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),d)
(((n,qn,fsp,fh,gp,pv),(s,fs,fc,Ls,Lco)),d)
(n,qn,fsp,fh,gp,pv)
1
1`("s",1,10,0,3)
1
1`("n",true,4,4,grasp,perceives)
1
1`("c","ketamine")
1
1`"Fred"
1 1`()
1 1`()
Ref CPN TERMS: P =place, T = transition PATH
(at point of affordance-
effectivity)
MECHANI S M CRITICAL AFFORDANCE
FACTORS
(path/mechani sm)
RESOURCE
CONDITIONS
P1
Syringe
fs=1N, fc = 10N,
Empty/clean
T1
GRASP SYRINGE:
The empty syringe is grasped wit hout slipping, then pushed
closed to draw up the drug. The The critical affordance expressions are s hown
by the guard conditions on ‘grasp syringe’. hands fit round syringe, grasp force fs
must be greater than slip force ( 1N) but less than crush force (10N).
hands fit round sy ringe gras p forc es fh fh > fs, fh< fc, hands fit
round syringe, grasp force
fs must be greater than
slip force ( 1 N) < crush
forc e
(
10N
)
Syringe s slip and
crush forces, scale ls
= 0 and lco =3cm
P2 Nurse
Nurse
P3 Syringe grasped by nurse
NSGrasped - the nurse
g
ras
p
in
g
the s
y
rin
g
e
T2
PUSH PLUNGER CLOSED:
To draw up the drug the syringe plunger is pressed
closed by the nurse applying a force fsp > a minimum plunger force. Otherwise
the drug cannot enter the syringe.
hand attached to
plunger, plunger at end
of syringe ls = lsc = 0
plunger forc e + fsp fsp1 > forceplunger (min
force to move it)
Syringe held in closed
position
P4 Syringe ready to draw up (plunger in closed position)
ls =0 NSGrasped - with
P5 Ampoule C with drug
drug type - ketamine ContainerDrug - an
T3
PLACE SYRINGE IN AMP OULE:
containing the correct drug. If not in drug no
drug will be drawn up (capability failure). The mechanism here is the gasp force
holding the syringe and the ampoule - not shown
syringe needle
immersed in drug
nurse grasp forces on
syringe & ampoule
d=ketamine ketamine is the correct
drug/label for patient
P6
Syringe in Ampoule ls = 0 NSReadyDrugDraw
T4
DRAW UP DRUG:
Plunger is pulled back to draw up drug to the correct amount
in increments of ls + 1 . Mechanism here is pulling force on the plunger creating
a partial vacuum and atmospheric pres s ure forces the drug into the s yringe.
Hand on plunger moved
to end of syringe ie ls =
Lco = 3
negative plunger force = -
fsp
fsp1 > forceplunger (min
force to move it), ls = 3
-fsp applied (not
shown) ls = ls +1 until
ls = 3 on scale
P6'
Syringe in Ampoule ls = 3 NSReadyDrugDraw
T5
REMOV E SYRINGE FROM AMPOULE:
The draw up drug cont inues until ls =
3.= Lco. Incorrect amounts = capability failure / patient not anaesthetised
ls = 3 syringe not in ampoule
P7
Syringe loaded with drug ls =Lco NSdloaded
T6
CHANGE GRAS P TO HOLD TO INJECT:
Nurse’s finger tip locations/forces
adjusted for safe drug injection at correct angle. Failure risks patient injury and
not/partly injecting the drug
Grip pattern (position of
fingers) = hold
grasp forces fh fh > fs , fh< fc, GripPat t ern
= hold
Syringe constrained
in'hold to inject'
position with no slip
P8
Syringe Held to inject gp = hold NSdloaded
T7
FIND VEIN:
A vein on the patient is perc eived, bas ed on the nurse’ knowledge.
Mechanism is nurse’ perception/cognition, visual ability (No vein, incorrect site =
capability failure)
Visual path: ie nurse
can see the patient and
the site of injection
perception-cognition
mechanism (Pv)
Pv = true Nurse - has updated
knowledge - Vein is
found
P9
Vein Found pv = perceives NSdloaded
P10
Patient Ready pat = Fred Nurse sees the vein
T8
PUSH SYRINGE IN VEIN:
at correc t angle and position pv = perceives,pat = fred Correct patient vs drug
P11
Syringe in Vein ls >0 NSInjectpatient
T9
INJECT:
Plunger pushed closed at correct injection site to ensure drug is
transferred to the patient, (otherwise no anaesthesia and capability fails)
syringe plunger location
ls = 0
fsp fsp > min, ls > 0 Syringe held in closed
position
P11'
Syringe in Vein ls = 0 NSInjectpatient
T10
REMOV E SYRINGE...
- Inject contintues until ls = 0 (syringe can be withdrawn) ls= 0 Syringe not in patient
P12
Syringe Empty ls= 0 Syringe
P13
Nurse Available Nurse
P14
Patient Injected
Patient Injected
Table 2: CPN-CAM Path and Mechanism Sequence.
Modelling Capability and Affordance as Properties of Human/Machine Resource Systems
81

inject the drug. If any actions do not have the correct
conditions ie any of the critical affordance factors,
path and mechanism are incorrect, there will be no
capability. The key actions (See fig. 5) are the nurse
grasping the empty syringe and pushing the plunger
closed ready to draw up the drug. The nurse places
the syringe in a drug container (ampoule) and pulls
the plunger to draw up the drug. The nurse holds the
syringe in a different way – ‘hold to inject’ and
looks for a vein on the patient. Having perceived the
vein the nurse pushes the syringe into the vein at the
correct position and angle and then presses the
syringe plunger to inject the drug. See Table 2.
5.2 Behaviour of the CP-Net CAM
Model
Decomposing this process sequence into actions
(CPN transitions labelled T) and situations (places
labelled P) enables us to identify the critical state
transitions and affordances/effectivities. Figure 6
shows a CPN model of the capability to ‘inject the
drug.’. The initial state and the goal state of the
business process are modelled by places that may
contain tokens of given colors. Places are connected
via transitions so paths leading from initial states to
goal states relate to the capability of the system, ie
the CPN simulation reaching the goal state. Tokens -
represent instances of business object and agent
actions and values for the dispositions of each
resource (object or agent) at the point of interaction.
Transitions represent the transformation affordance-
effectivity interactions. A transition T of a CP-net is
enabled if places of all its input arcs contain tokens
to give values to input expressions of T, and the
guard value is true. The guard values represent the
critical affordance factors. Eg in T7, perceives vein
must be true for injection to occur. Each enabled
transition t can fire. When a transition t fires then for
each input arc its expression is evaluated by a token
from the arc’s place. For each output arc its function
is calculated using the values of the variables from
the input arcs of the transition. The result of the
output function is added as a token into the place of
the output arc. Affordance is represented by
properties p of the passive resources and
environment. Eg Syringe –properties are implied by
the token: (s (name) ,fs (slipforce, fc (crush force),
Ls (syringe scale level, Lco (scale zero)). Effectivity
is represented by properties q of the active resources
eg the nurse that acts on the syringe, eg Nurse
properties are implied by the token: (n (name), qn
(quality), fsp (plunger force), fh (hand force), gp
(grasp type), pv (perceives)). Affordance Path at
the transformation point, is represented as a net of
transitions from the initial places to the goal state G.
G is represented by the state of resources; patient is
injected, syringe is empty, nurse is available.
Affordance Mechanism is modelled with functions
corresponding to guards and functions associated
with arcs of transitions, eg the force fh applied by
the nurse enable the syringe a) to be held in place to
execute the affordance-effectivity and b) a second
force fsp on the plunger moves it to draw up the
drug due to the mechanism of a vacuum created in
the syringe. Affordance Chains represent the
concatenation of resource instances and their
disposition variables, we use Cartesian products and
a value of token with a product type. Cartesian
products relate to the Affordance Chain of agent and
component objects (eg syringe plunger etc) needed
to enable the affordance-effectivity interaction. For
example a nurse holds a loaded syringe
(NSDloaded)
or an ampoule containing a drug (ContainerDrug).
The mechanism, path and critical affordance factors
at transitions are shown in table 2.
6 DISCUSSION
The CPN Capability Affordance model provides a
precise means of modelling and simulating business
resource interactions and their capability properties
and quantitative values. The model shows that if no
affordance (space time) path to the goal state of
‘inject’ is possible there is no capability to inject.
This is represented by the existence of a complete
CPN trace to the end state goal. It also shows that
capability to inject depends on the mechanism of
forces and perception that relate to real-world
interactions and conditions. CPNs are executable.
This enables critical affordance factors for forces,
locations and positions to be identified and modelled
so key actions and required properties of the
resources for capability ‘to inject a drug’ can be
identified. For space and complexity reasons not all
factors are included. For example; a) the nurse must
perceive the drug label on the ampoule and ensure it
is matched to her knowledge of what drug should be
injected into what patient, b) the patient must be
perceived and identified by the nurse as the correct
patient.
7 CONCLUSIONS
This paper has shown how capability, affordance
and critical affordance factors can be presented in a
Fourth International Symposium on Business Modeling and Software Design
82

CPN model. It shows how capability depends on; a)
the existence of a possible path of interaction
between the resources (nurse, syringe, ampoule,
patient), b) a mechanism of transition (forces and
drug interaction in this case), c) specific critical
affordance factors relating to the actual value of the
affordance and effectivity variables for resources
such as people and objects within instances, d) That
these variables relate to Gibson’s original
explanation of affordance disposition and the
affordance-effectivity dual relationship. Future work
will focus on the detail of a single action and its
affordance-effectivity relationship by decomposing
this into affordance path, mechanism and affordance
factors, including perception and planning as well as
control actions.
REFERENCES
Andre 2011: http://www.usernomics.com/AnthonyAndre.
PDApresentation.WhatMakesAPrefilledSyringeUsable
AndErgonomic.July2011.pdf
Beimborn, D., Martin S.F., Homann U. 2005.
Capability Oriented Modelling of the Firm. IPSI
Conference.
Brooks R.A.. New approaches to robotics. Science,
253(5025):1227, 1991.
Gallouj, F., Weinstein O., 1997. Innovation in services.
Research Policy, Vol 26, Issues 4-5.
Gibson, J.: The Ecological Approach to Visual Perception.
Houghton Mifflin Company, Boston (1979)California
Management Review.
Greeno J.G. Gibson's affordances. Psychological Review,
101(2):336- 342,1994..
Jensen. K., Coloured Petri Nets.Springer.1997
Kim, N., Thiruvengada, H., Rothrock, L., Wysk, R. A., &
Shin, D., (2008). Modelling of affordances in human-
involved complex systems using finite state automata
(FSA). IEEE Transactions on Systems, Man, and
Cybernetics-Part A: Humans and Systems.
Kim, N. H., (2010). The Formalism of Affordance in
Human-machine Cooperative Systems Using Finite
State Automata (FSA) (Doctoral dissertation, The
Pennsylvania State University).
Lenarčič, A. (2011). Formalizing affordances in situation
theory (Unpublished master’s thesis).Brock
University, Department of Computer Science, Ontario,
Canada.
Lenarčič, A., & Winter, M. (2013). Affordances in
Situation Theory. Ecological Psychology, 25(2), 155-
181.
Makadok, R. 2001. Towards a synthesis of the resource
based dynamic capability views of rent creation.
Strategic Management Journal.22: 387–401.
Mantel, B., Hoppenot, P., & Colle, E. (2012). Perceiving
for Acting With Teleoperated Robots: Ecological
Principles to Human–Robot Interaction Design.
Systems, Man and Cybernetics, Part A: Systems and
Humans, IEEE Transactions on, 42(6), 1460-1475.
Mark, L. (1987). Eye height-scale information about
affordances: A study of sitting and stair climbing.
Journal of Experimental Psychology: Human
Perception and Performance, 13, 360–370.
Michell, V.A.(2011) A Focused Approach to Business
Capability. First International Symposium on Business
Modelling and Software Design – BMSD 2011, Sofia,
Bulgaria, pp. 105–113.
Michell V.A. (2012) The Capability Affordance Model:
Comparing Medical Capabilities. In: B. Shishkov
(Ed.) Business Modeling and Software Design –
BMSD’12 Revised Selected Papers, Springer-Verlag –
Lecture Notes in Business Information Processing,
Berlin-Heidelberg.
Michell V.A. Cognition capabilities and the capability-
affordance model. Business Modelling and Software
Design BMSD 13 Noordwijkerhout, Netherlands 8-10
July 2013
Ortmann, J. and Kuhn, W. (2010). Affordances as
Qualities. In Galton, A. and Mizoguchi,R., editor,
Formal Ontology in Information Systems Proceedings
of the Sixth International Conference (FOIS 2010),
volume 209 of Frontiers in ArtificialIntelligence and
Applications, pages 117–130, Amsterdam Berlin
Tokyo Washington,DC. IOS Press.
Prahalad, C.K., Hamel G.: The Core Competence of the
Corporation. HBR, May- June 2-15(1990)
Sahin E., Cakmak, M., Dogar, M.R. Ugur, E.. Ucoluk G..
To Afford or Not to Afford: A New Formalization of
Affordances Toward Affordance-Based Robot
Control. Adaptive Behavior, 15(4):447-472, 2007.
Stamper (1994) SE4 Organisational dynamics social
norms and information systems
Steedman M.. Formalizing affordance. Proceedings of the
24th Annual Meeting of the Cognitive Science
Society, pages 834-839, 2002.
Stoffregen. T .A. Affordances as Properties of the
Animal-Environment System. Ecological Psychology,
15(2):115-134, 2003.
Turvey, M.T.: Affordances and Prospective Control: An
Outline of the Ontology. Ecological Psychology 4(3),
173–187 (1992)
Van der Aalst W.M.P. and Stahl. C. Modeling Business
Processes - A Petri Net-Oriented Approach. The MIT
Press, 2011.
Warren, W.H.: Perceiving Affordances: A Visual
Guidance of Stair Climbing. Journal of Experimental
Psychology: Human Perception and Performance
10(5), 683–703 (1984)
Modelling Capability and Affordance as Properties of Human/Machine Resource Systems
83
