
An Improved Real-time Method for Counting People in Crowded
Scenes Based on a Statistical Approach
Shirine Riachi, Walid Karam and Hanna Greige
University of Balamand, Deir Al Balamand, Al Kurah, Lebanon
Keywords: Crowd Counting, Indirect Approach, Feature Regression, SURF Features, PETS Dataset.
Abstract: In this paper, we present a real-time method for counting people in crowded conditions using an
indirect/statistical approach. Our method is based on an algorithm by Albiol et al. that won the PETS 2009
contest on people counting. We employ a scale-invariant interest point detector from the state of the art
coined SURF (Speeded-Up Robust Features), and we exploit motion information to retain only interest
points belonging to moving people. Direct proportionality is then assumed between the number of
remaining SURF points and the number of people. Our technique was first tested on three video sequences
from the PETS dataset. Results showed an improvement over Albiol’s in all the three cases. It was then
tested on our set of video sequences taken under various conditions. Despite the complexity of the scenes,
results were very reasonable with a mean relative error ranging from 9.36% to 17.06% and a mean absolute
error ranging from 1.13 to 3.33. Testing this method on a new dataset proved its speed and accuracy under
many shooting scenarios, especially in crowded conditions where the averaging process reduces the
variations in the number of detected SURF points per person.
1 INTRODUCTION
Real-time estimation of the number of people in a
given area could be crucial for crowd management
and safety purposes, especially in places witnessing
mass gatherings of people (stadiums, theatres, holy
sites, subway stations, etc.). For instance, such infor-
mation might be very useful to prepare evacuation
plans in cases of potential threats. Moreover, an
accurate estimation could lead numerous economic
advantages like managing human resources,
improving service quality and analyzing customers’
behavior.
Early methods for people counting involve the
use of turnstiles, thermal sensors, tally counters and
light beams which represent the disadvantage of
being inaccurate when more than one person is
passing through the monitored gate at the same time.
Besides, their use is limited to entrance gates and
doors and cannot be extended to wider regions.
Hence, it was necessary to rely on image processing
techniques to provide a real-time automatic count of
passing people through a certain region by analyzing
a series of images captured with a video camera.
Common methods for crowd counting make use
of detection algorithms to spot faces, heads, human
silhouettes, or other parts of the human body in
order to estimate the count. These methods proved to
be accurate in low-density crowds, but their perfor-
mance was drastically reduced in more crowded
scenes involving a high-degree of occlusions. Recent
methods aim at extracting some easily detectable
scene features such as foreground pixels, edges,
interest points, etc. A certain relation is then
established between these features and the number
of people. Some of these techniques could perform
in real-time and with good accuracy especially in
crowded scenes.
To maintain the real-time feature while achieving
better accuracy, we base our work on (Albiol et al.,
2009) winner of the PETS contest on people
counting. We first detect interest points using the
SURF algorithm (Bay et al., 2008). SURF is used
for its stability and scale- and rotation-invariance
(Bauer et al., 2007). Subsequently, static interest
points are eliminated using ARPS (Adaptive Rood
Pattern Search) block-matching technique (Nie and
Ma, 2002). Finally, a linear relation is assumed
between the remaining SURF points and the number
of people.
There are mainly two contributions of this paper.
First, we improve on a feature-based real-time
203
Riachi S., Karam W. and Greige H..
An Improved Real-time Method for Counting People in Crowded Scenes Based on a Statistical Approach.
DOI: 10.5220/0005108002030212
In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2014), pages 203-212
ISBN: 978-989-758-040-6
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

people counting method from the state of the art by
using a more stable, repeatable and scale-invariant
interest point detector (SURF). Second, we test this
method on a new, more challenging dataset of
videos taken under various conditions, and involving
different crowd densities and perspective effects in
order to point out its strengths and weaknesses.
2 RELATED WORK
Recent research took advantage of the progress
made in computer vision and image processing to
devise robust crowd counting methods. These
methods could be divided into two main categories:
direct approach methods and indirect approach
methods. The first, also called detection-based, aim
at detecting people individually and counting them.
Huang et al. (2011) perform ellipse detection for the
whole human silhouette after extracting foreground
blobs. The best-fit ellipse parameters are then used
to determine the number of people in each blob.
Zhang and Chen (2007) use a single Gaussian model
for moving objects detection before people are
segmented. To deal with the occlusions problem,
they perform group tracking in order to keep record
of the number of people in each group.
To overcome the complex task of people
segmentation, some techniques suggest detecting
only visible parts of the body such as faces (Zhao et
al., 2009), heads (Merad et al., 2010; Subburaman et
al., 2012), or Ω-shaped head-shoulders region (Li et
al., 2008; Zeng and Ma, 2010). While these methods
could be advantageous in some cases, their use is
limited to specific camera viewpoints and sparse
crowds.
Indirect approach methods, also called feature-
based, started receiving more attention lately for
their ability to deal with occlusions and perspective
effects. These techniques exploit various image
features such as foreground pixels and interest
points, and they map them to the number of people
in the image through a certain learning process.
An early real-time method developed by Davies
et al. (1995) employs background removal
techniques to obtain foreground pixels and edge
pixels. Then a relation is established between the
number of these pixels and the total number of
people by combining these two measurements
through a linear Kalman filter. A method proposed
by Ma et al. (2004) performs geometric correction
(GC) to bring all the objects at different distances to
the same scale before establishing a linear relation
between the scaled number of foreground pixels and
the number of people. Similarly, a method proposed
by Li et al. (2011) consists of extracting the
foreground using an adaptive model for background
subtraction. Two steps are then performed to remove
the shadow treated falsely as foreground, first by
analyzing the texture, and then the HSV values.
Perspective effects are also accounted for by
computing a normalization map where pixels are
weighed according to the depth of the objects. Some
low-level features such as total area, perimeter, edge
pixels, etc. are extracted from each crowd blob and
fed into a trainable regressor to estimate the output.
Marana et al. (1997) suggested that the texture of
a crowd image is strongly affected by the crowd
density. They assumed that a low-density crowd
image presents coarse texture patterns while a high-
density one presents fine texture patterns. Hence,
texture features were extracted using two different
methods: statistical and spectral. The statistical
approach relies on Grey Level Dependence Matrix
(GLDM) which estimates the probability of a pair of
grey levels occurring in the image. The spectral
approach uses frequency information by analyzing
the Fourier spectrum. Recent texture-based methods
include the one proposed by Chan et al. (2008)
where the number of features extracted was
increased to 28, and the Gaussian Process regression
was employed to estimate the count. Also, Wen et
al. (2011) use a set of well-established 2-D Gabor
filters to extract global texture features, and the
Least Squares Support Vector Machine (LS-SVM)
to regress the output.
The winner of the PETS2009 contest on people
counting was an algorithm presented by Albiol et al.
(2009). The authors detect corner points using the
Harris corner detector. Motion vectors computed
with respect to the previous frame are subsequently
associated to the detected corners through a multi-
resolution block-matching technique, and corners
with null motion vectors are filtered out. A constant
number of points per person is assumed, so a linear
relation is established between the remaining corner
points and the number of people. Finally, the output
is smoothed out by averaging over time to reduce the
oscillations.
Conceptually similar methods trying to account
for perspective and density effects were lately
introduced. Conte et al. (2010) use the SURF
algorithm for interest point detection. Moving
interest points are then divided into groups of people
according to their distance from the camera. Also,
the density of each group of points is computed.
These measures with the number of points for each
cluster are fed into a trainable regressor (ε-SVR) to
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
204
obtain the results. Fradi and Dugelay (2012) use the
SIFT detector instead and perform perspective
normalization at a pixel level. A density-based
clustering algorithm is also employed to divide
moving interest points into clusters according to
their density, and Gaussian Process regression is
trained to estimate the count. These methods
achieved a high accuracy rate, but they represent the
disadvantage of being computationally expensive,
and they require a lot of training.
3 PROPOSED METHOD
To overcome the complexity of segmentation and
detection algorithms, and to keep on the crucial real-
time characteristic of this system, we propose an
indirect approach method that is strongly inspired by
(Albiol et al., 2009).
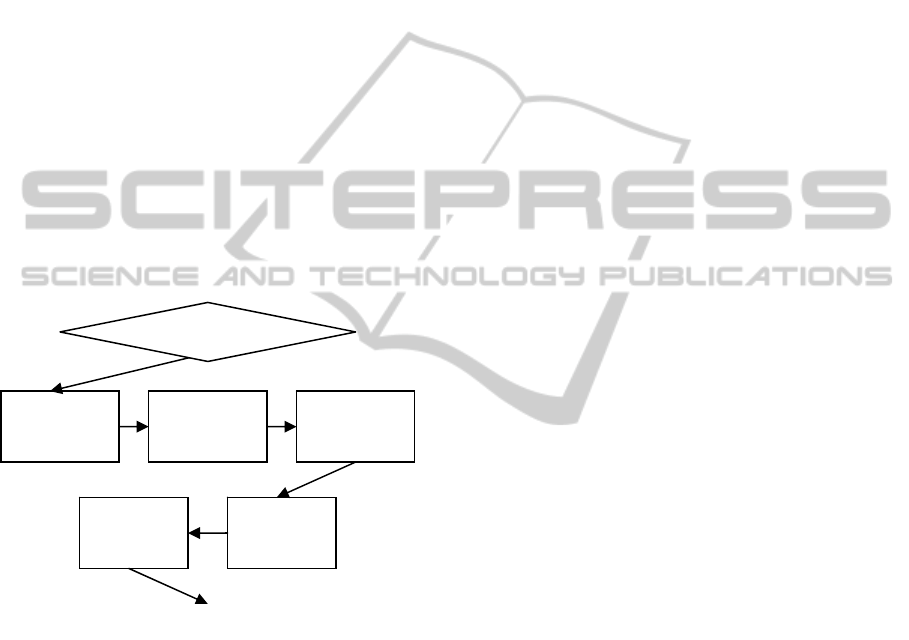
The flowchart of our system is represented in
Figure 1, and its components are further explained
throughout this section.
Figure 1: Architecture of the proposed technique.
3.1 SURF Points Detection
In order to understand how interest points could
relate to the number of people in an image, we start
by defining them. An interest point is a point that
has a well-defined position in the image space, a
clear and well-founded mathematical definition and
can be robustly detected. Examples of such points
are corners (intersection of two edges), line endings,
T-shapes, blobs, a point on a curve where the
curvature is locally maximal, etc. The most widely
used interest point detectors are: Harris corner
detector, Scale Invariant Feature Transform (SIFT)
and Speeded-Up Robust Features (SURF).
As per (Conte et al., 2010), interest point detection is
performed using the SURF algorithm (Bay et al.,
2008) instead of the Harris corner detector. The
choice of the first is based on (Bauer et al., 2007)
where various implementations of Harris, SIFT and
SURF methods were tested and evaluated for
invariance against rotation, scale change, image
noise, change in illumination and change in view-
point. The authors concluded eventually that SURF
is superior to the other two methods in terms of
performance with respect to computational cost.
The nature of the interest points detected is
highly dependant on the algorithm employed. For
instance, SURF is based on the Hessian matrix;
therefore it detects blob-like features. Moreover, it
uses a basic Hessian matrix approximation and relies
on integral images. This approximation by box type
convolution filters and the use of its determinant for
interest point localization and scale selection renders
SURF very fast and scale-invariant. The mathemati-
cal background of the SURF algorithm, described
hereafter, highlights its efficiency when used in
people counting systems.
3.1.1 Integral Images
The use of box type convolution filters becomes
computationally expensive when the filters’ sizes
increase. Therefore, integral images are associated to
the original images in order to allow for fast compu-
tation of box type convolutions.
The entry of an integral image I
Σ
(z) at a location
z = (x,y)
represents the sum of all pixels in the input
image I within a rectangular region formed by the
origin and z.
00
(z) ( , )
jy
ix
ij
I
Ii j
(1)
Using integral images, only three operations are
needed to calculate the sum of intensities inside any
rectangular area. This fact allows the use of big size
filters without increasing the computational time.
3.1.2 Hessian Matrix
In their winning algorithm, Albiol et al. (2009) use
the Harris corner detector. Assuming that corner
points aren’t a main characteristic of the human
shape, we suggest detecting blob-like features
instead. This is ensured by the Hessian matrix-based
SURF algorithm.
The Hessian matrix H(z,σ) in a point z = (x,y)
and at scale σ is given by:
(z,) (z,)
(z, )
(z,) (z,)
xx xy
xy yy
LL
LL
(2)
Preprocessing
SURFpoints
detection
Linear
regression
SURFpoints
filtering
Smoothing
out
Videoacquisition
Estimatednumberofpeople
AnImprovedReal-timeMethodforCountingPeopleinCrowdedScenesBasedonaStatisticalApproach
205
Where L
xx
(z,σ) is the convolution of the Gaussian
second order derivative
2
2
()g
x
with the image in
point z, and similarly for L
xy
(z,σ) and L
yy
(z,σ).
The discrete nature of the images requires the
Gaussian derivatives to be discretized and cropped.
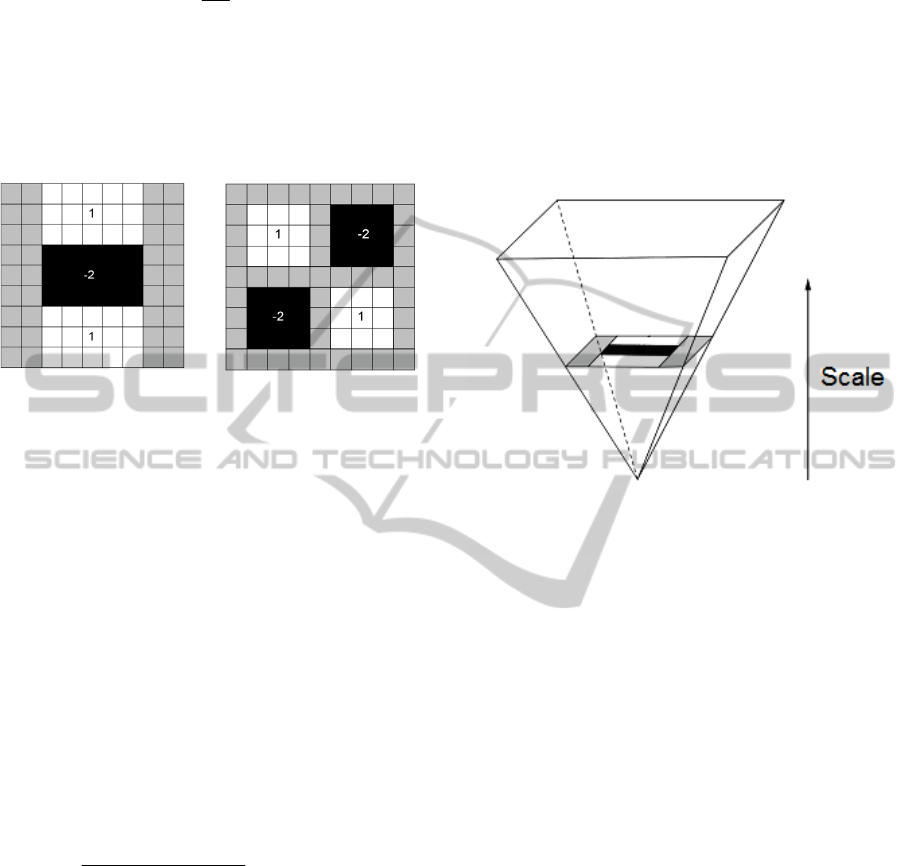
Bay et al. (2008) took a step further by also approxi-
mating Gaussians with box type convolution filters
(see Figure 2).
Figure 2: The approximated second order Gaussian deri-
vatives for scale σ=1.2 in y- (Dyy) and xy- direction
(Dxy), respectively.
With such filters used on integral images, it is
enough to find the sum of the intensities in each
rectangle/square (which requires only three integer
operations), multiply by the corresponding weight,
and add the results for the whole filter instead of
convolving it with the original image
The blob response at a location z = (x,y) and
scale σ is then given by the determinant of the
approxi-mated Hessian:
det(Happrox) = DxxDyy − (0.9Dxy)
2
(3)
Dxx, Dyy and Dxy are the approximated Gaussians.
The value 0.9 is used to ensure energy is conserved
between Gaussians and approximated Gaussians.
Given that |x|
F
is the Frobenius norm, 0.9 is obtained
as follows:
| (1.2) | | (9) |
0.9
| (1.2) | | (9) |
xy F yy F
yy F xy F
LD
LD
(4)
Further normalisation is performed by maintain-
ing a constant Frobenius norm for all filters, and
response maps are stored over space and scale
allowing the detection of local maxima.
3.1.3 Scale Space
Creating a scale-invariant detector requires the
interest points being found at different scales. This is
usually achieved by building a scale space pyramid,
where the base represents the lowest scale. The scale
is then increased as we reach towards the top of the
pyramid. Normally, to fill the pyramid upwards, the
image is repeatedly smoothed by a Gaussian and
sub-sampled. This sub-sampling might cause
aliasing problems. Therefore, Bay et al. offer an
alternative for this method where no sub-sampling is
needed. Instead, they suggest filtering the original
image by increasingly larger filters until reaching the
top of the pyramid (see Figure 3). This isn’t compu-
tationally expensive because, as mentioned prev-
iously, the use of box type filters on integral images
is independent of the filter’s size.
Figure 3: Bay scale pyramid formed by iteratively filtering
with increasing size filters until the filter’s size becomes
larger than the original image.
The scale space is also divided into octaves; each
octave covers a scale change of factor at least 2.
Therefore, an octave includes a constant number of
scale levels obtained by filtering the image
repeatedly with bigger filters until the initial filter’s
size is more than doubled. Generally, three to four
octaves are enough to cover all scales needed, and
the octaves overlap to ensure full coverage of each
scale.
The filters used for the first octave increase
symmetrically by 6 pixels for each new scale level.
They are of sizes 9, 15, 21 and 27. For each new
octave, the increment in the size of the filter is
doubled. Subsequently, the filter sizes used for the
second octave are 15, 27, 39 and 51 with an increase
of 12 pixels. The remaining octaves are obtained
similarly.
3.1.4 Localisation
After filtering with the approximated Gaussian
filters in the three directions (x-, y- and xy-) to
construct the scale pyramid, the determinant of the
approximated Hessian matrix is evaluated spatially
and over scales. Subsequently, a fast non-maximum
suppression method is employed to detect local
maxima in each 3×3×3 neighbourhood.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
206

The positions of these maxima are then interpo-lated
in space and scale by fitting a 3D quadratic. For this
purpose, the Taylor expansion of the Hessian
determinant is computed:
2
T
2
1
(x) ( ) x x x
x2x
T
H
H
HH
(5)
Where x = (x,y,s)
T
is the coordinate in image space
and scale, and H(x)
is the Hessian determinant at
location x. Derivatives are approximated using finite
differences formulas, and the interest point location
ˆ
x
is the extremum of this 3D quadratic, given by:
2
1
2
ˆ
x( )
xx
H
H
(6)
Interpolation in scale space is particularly
important as the difference between the first layers
of each octave is large. Finding a sub-scale location
of interest points can partially solve this issue.
Finally, it’s worth noting that SURF is not only a
detector, but also a descriptor that enables matching
interest points in different frames. It uses techniques
such as Haar Wavelet responses and sign of the
Laplacian (i.e. trace of the Hessian matrix) to build
64×64 descriptors of interest points neighbourhoods,
allowing them to be matched with corresponding
points in other images. As this feature wasn’t used in
our case, it won’t be explained in detail here.
3.2 Motion Estimation
Interest points are detected at blob-like locations all
over the image. But since only those belonging to
people are needed, a method should be employed to
remove irrelevant ones. Based on the assumption
that all pedestrians in the image are moving, motion
information could be used efficiently to extract static
interest points and eliminate them. This assumption
is true in most cases because even if a person is
standing, slight movements of his arms, legs and
head happen all the time.
To estimate motion vectors efficiently, a well-
known block-matching technique from the state of
the art was employed. Based on (Barjatya, 2004),
the Adaptive Rood Pattern Search (ARPS) algorithm
(Nie and Ma, 2002) outperformed all the others in
terms of accuracy and speed, therefore we choose to
use it in our system.
Like all other block-matching techniques, ARPS
divides the image into macro blocks of a specific
size (usually 16×16 pixels). A cost function is then
intelligently minimized to match each block with its
corresponding one in a previous frame. This change
in position of corresponding macro blocks enables
the computation of their motion vectors. Interest
points are then assigned the motion vector of the
macro blocks they fall into.
The most widely used cost functions include the
Mean Absolute Difference (MAD), the Sum of
Absolute Differences (SAD) and the Mean Squared
Error (MSE).
2
11
1
|(,) (,)|
NN
ij
M
AD C i j R i j
N
(7)
11
|(,) (,)|
NN
ij
SAD C i j R i j
(8)
2
2
11
1
[(,) (,)]
NN
ij
M
SE C i j R i j
N
(9)
Where N is the side of the macro block, C(i,j) and
R(i,j) are the pixels at location (i,j) that are being
compared in the current and reference macro blocks,
respectively.
The neighbourhood of the macro block searched
for the best match is specified by a search parameter
p (p is usually equal to 7 pixels). While the basic
Full Search (FS) algorithm checks all possible
locations in the search area defined by p, ARPS
moves directly to the most promising area where the
probability of finding the matching block is the
highest. This reduces drastically the computational
time.
Based on the assumption that motion in a frame
is coherent, i.e. a macro block moves in the same
direction with its neighbouring blocks, ARPS
exploits spatial correlation for motion vector
prediction. More precisely, the motion vector of the
current block is predicted to be equal to that of its
immediate left.
Furthermore, camera movements occur mostly in
the horizontal and vertical directions, therefore these
directions need to be also checked for a possible
match. Hereby, the search points for the first step
include, in addition to the position pointed by the
predicted vector, the adaptive rood pattern
represented by circles in Figure 4. It consists of five
points equally spaced at step size S = Max(|X|,|Y|),
where X and Y are respectively the x- and y-
coordinates of the predicted motion vector (in this
case S = Max(|2|,|-4|) = 4). We note here that an
overlap could occur between the predicted motion
vector and a vertex of the rood pattern. This reduces
by one the number of search points. Also, the rood
pattern is reduced to one point if the predicted
motion vector is zero. Finally, a step size of 2 is used
for the leftmost macro blocks.
Moving to the second step, the point with the
least weight becomes the center of the refined
AnImprovedReal-timeMethodforCountingPeopleinCrowdedScenesBasedonaStatisticalApproach
207
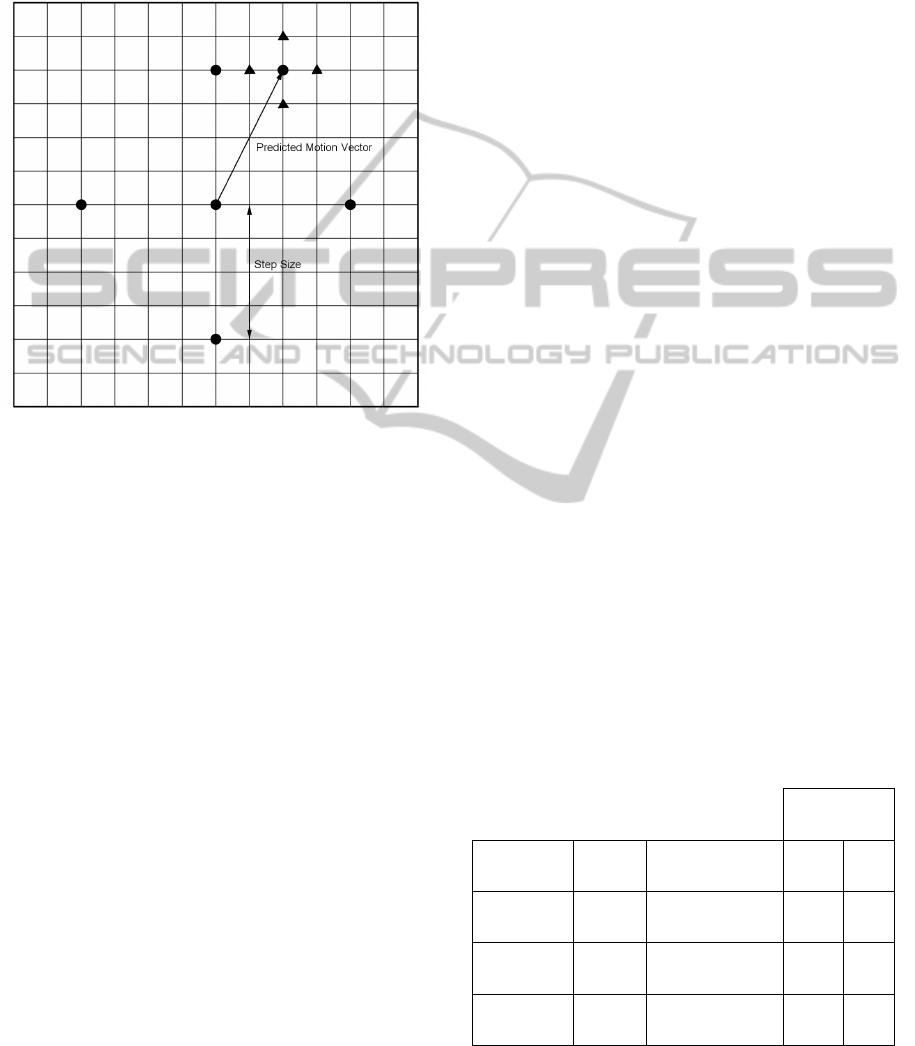
search. The search pattern used here is the Unit-size
Rood Pattern (URP) represented by triangles in
Figure 4. This pattern is iteratively repeated after
repositioning the minimum weighted point found at
its center until the minimal matching error is found
to be at the center of the URP.
Figure 4: The points checked in the first step are represen-
ted by circles. The neighbourhood of the least weighted
point is subsequently checked using the URP search
pattern represented by triangles. This procedure is
iteratively repeated until the minimum error is found at the
center of the URP.
After interest points are associated with motion
vectors, those whose motion vector’s length is below
a certain threshold are considered static and
eliminated. The remaining points belonging to the
foreground of moving people are retained to be used
in the next step.
3.3 Linear Regression
Another assumption that each person contains an
average number k of interest points is also made.
Subsequently, the number of people in a frame could
be obtained by dividing the total number of points N
retained for that frame by k. To determine k, we
have to train the system; that is, N is computed for a
certain frame and the number of people P in that
frame is annotated manually. k would then be equal
to N/P. We note here that k is not constant for all
shooting scenarios, it’s rather highly dependant on
the camera viewpoint and the scale perceived.
Therefore, training has to be done whenever the
viewpoint is changed.
3.4 Low-pass Filtering
In order to reduce the oscillations due to image
noise, the initial estimate is smoothed out using a
low-pass filter. In this case, we choose to average
the output over a certain number of consecutive
frames. This number depends on the frame rate at
which the video was taken.
4 EXPERIMENTAL RESULTS
At a first stage, the proposed method is assessed
using a public dataset. This enables the comparison
of the results with those achieved by other methods,
in this case with (Albiol et al., 2009). Nevertheless,
this might not be sufficient as no single dataset can
cover all possible scenarios.
At a second stage, four video sequences recorded
indoor and outdoor under different viewing and
weather conditions, also involving different crowd
densities are tested.
4.1 Experiments on the PETS Dataset
PETS is a public dataset that has been widely used
to assess crowd counting, density estimation and
other algorithms. In our experimentations, three
video sequences from the section S1 of the
PETS2009 dataset are tested. The characteristics of
these videos are shown in Table 1.
The number of people was estimated for each
frame using the method described in Section 3, and
the ground truth number (i.e. actual number) was
annotated manually. The frame used for training is
the one with the highest number of people, and the
low-pass filtering is performed by averaging the
output over 7 frames.
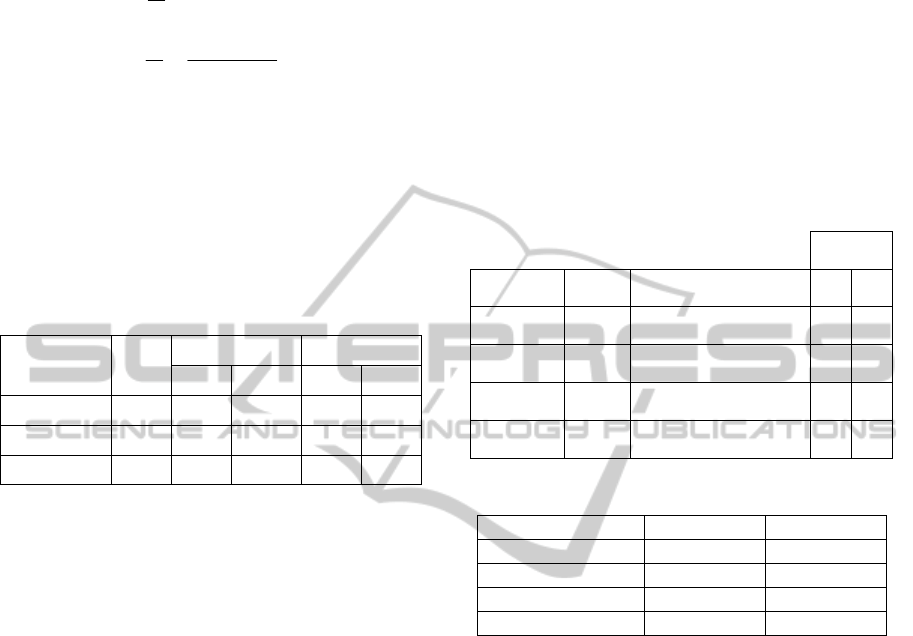
Table 1: Characteristics of the three PETS videos used.
Number of
people
Video
sequence
Length
(frames)
Conditions Min Max
S1.L1.13-57
(View1)
221
Medium density
crowd, overcast
5 34
S1.L1.13-57
(View 2)
221
Medium density
crowd, overcast
8 46
S1.L1.13-59
(View 1)
241
Medium density
crowd, overcast
3 26
Results are reported using the Mean Absolute
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
208
Error (MAE) and the Mean Relative Error (MRE)
defined as follows:
1
1
|() ()|
N
i
M
AE E i T i
N
(10)
1
1 | () ()|
()
N
i
Ei Ti
MRE
NTi
(11)
Where N is the number of frames in the video
sequence, E(i) and T(i) are the estimated and the true
number of persons in the i-th frame, respectively.
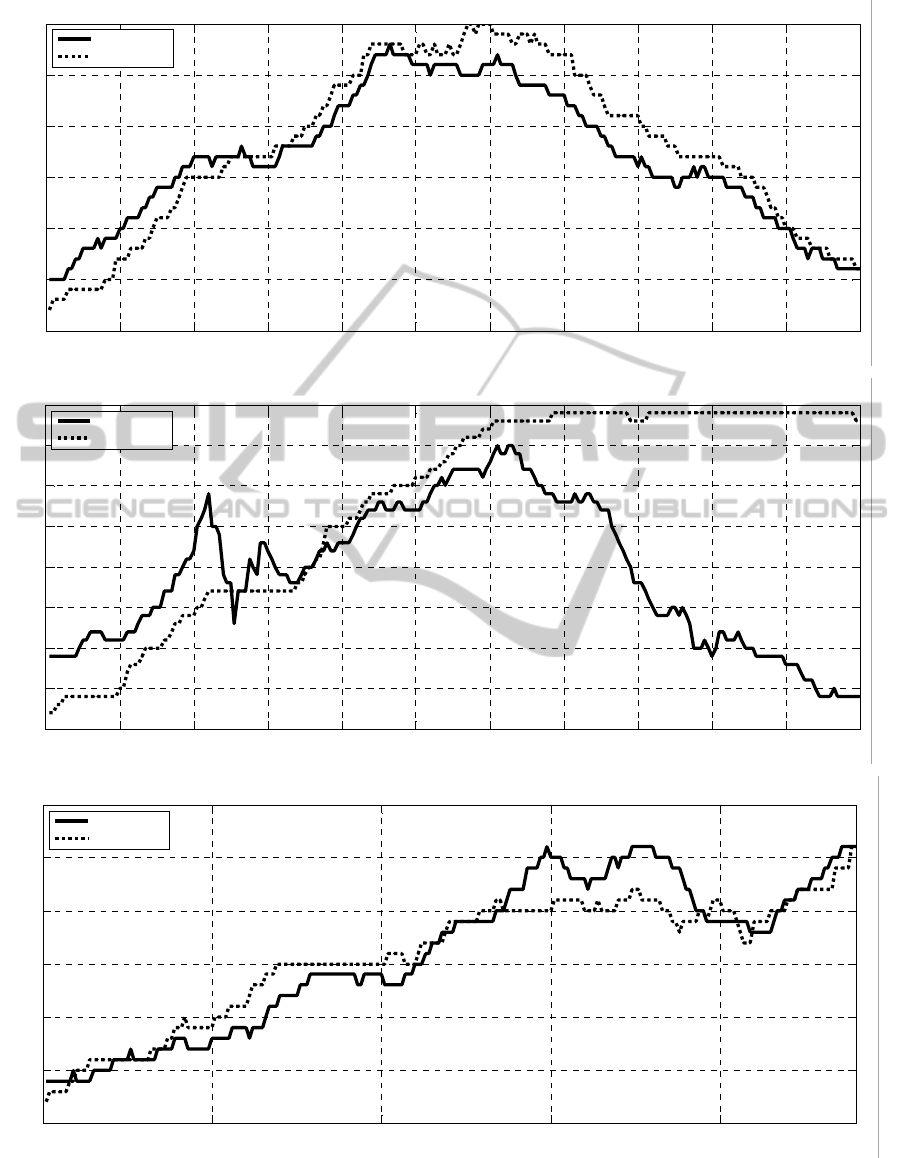
The results obtained are shown in Table 2 along
with those of Albiol et al. as provided in (Conte et
al., 2010). Also, graphs of the estimated and the
ground truth number of people with respect to time
are represented in Figure 5.
Table 2: Results on the PETS videos.
Video
sequence
View
Albiol et al. Our method
MAE MRE MAE MRE
S1.L1.13-57 1 2.80 12.6% 2.28 11.5%
S1.L1.13-57 2 29.45 106.0% 12.06 36.3%
S1.L1.13-59 1 3.86 24.9% 1.81 12.7%
An overall improvement over Albiol’s method is
noticed for these three video sequences while
simplicity and computational efficiency are
maintained. Despite the improvement, results aren’t
very impressive for the View 2 of the S1.L1.13-57
sequence with an MAE of 12.06 and an MRE of
36.3%. This is due mainly to the wide-depth range
characteristic of this video as people’s trajectory is
almost parallel to the optical axis of the camera. This
fact increases significantly the perspective effects.
4.2 Experiments on Our Dataset
Assessing further the performance of the proposed
method requires its testing on a set of more challen-
ging videos. For this purpose, four video sequences
were taken in three different locations in Lebanon.
Their characteristics are represented in Table 3.
All of these sequences include pedestrians of
different sizes (adults and kids). Some of them also
include people that are standing or sitting
(Za.B.0001), and occasionally some non human
moving elements such as boats, water (Za.B.0001,
U.O.B.0003 U.O.B.0004), or people with trolleys
(B.C.C.0002). Serious occlusions and perspective
effects are also observed in some cases (U.O.B.0003
and U.O.B.0004).
Frames are extracted from these videos and
preprocessing is done to make them similar to the
PETS videos in terms of frame rate, size and bit-
depth.
Training of the system and smoothing of the
output are performed similarly to the PETS
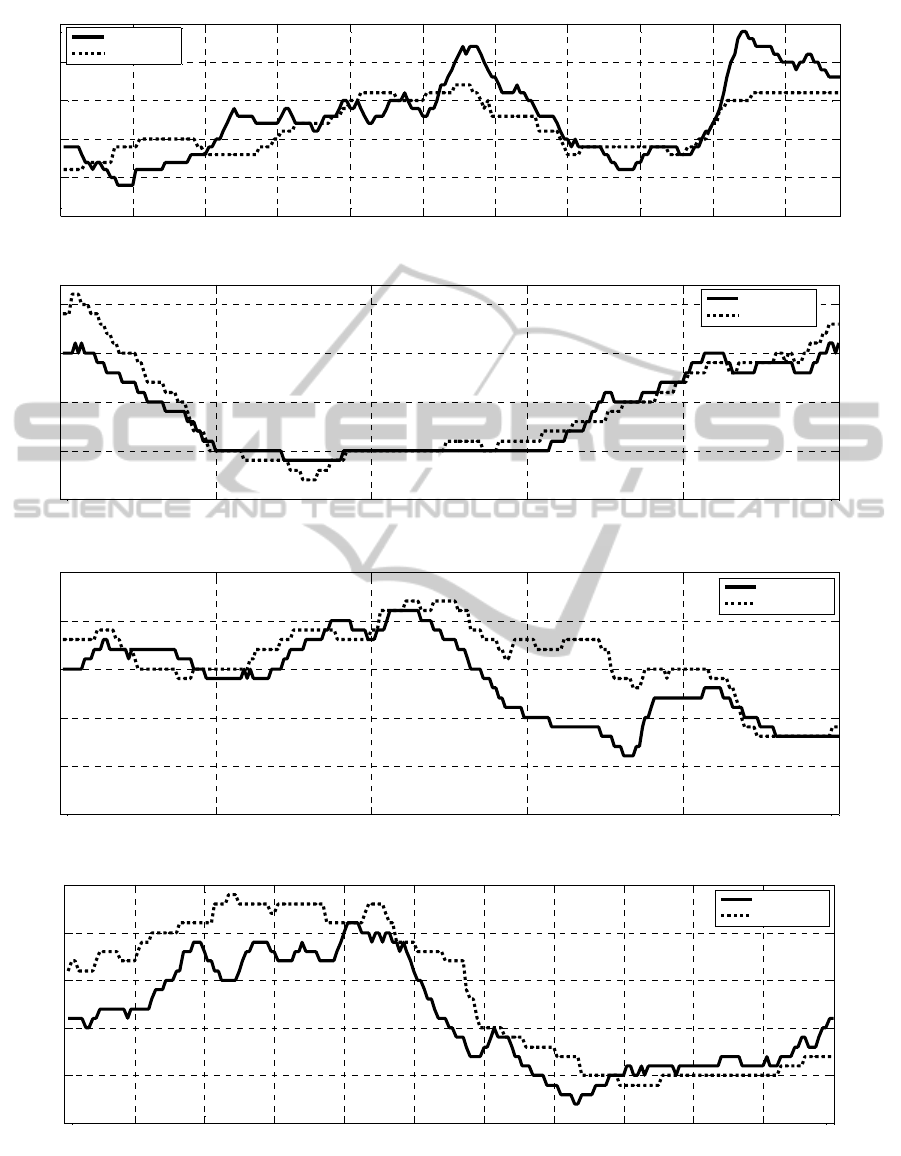
experiments. The results are also reported in terms
of MAE and MRE as shown in Table 4, and as
comparative graphs in Figure 6. It is worth noting
that the use of the relative error (MRE) is necessary.
The same absolute error could be considered trivial
if the scene is crowded, while it becomes significant
as the level of crowdedness decreases.
Table 3: Characteristics of our set of videos.
Number of
people
Video
sequence
Length
(frames)
Conditions Min Max
Za.B.0001 216
Medium density crowd,
bright sunshine, shadows
21 32
B.C.C.0002 251
Low to medium density
crowd, indoor
2 21
U.O.B.0003 251
Medium density crowd,
bright sunshine
8 22
U.O.B.0004 221
Medium to high density
crowd, bright sunshine
14 34
Table 4: Results on our dataset of videos.
Video sequence MAE MRE
Za.B.0001 2.53 9.36%
B.C.C.0002 1.13 13.04%
U.O.B.0003 2.81 17.06%
U.O.B.0004 3.33 13.48%
Despite the complexity of the scenes, the results
achieved were very reasonable with an MAE
ranging from 1.13 to 3.33 and an MRE ranging from
9.36% to 17.06%. Surprisingly, the most complex
scene (Za.B.0001) produced the best MRE (9.36%)
and the second best MAE (2.53). The least crowded
scene with remarkable perspective effects produced
the worst results (U.O.B.0003).
It was also noticed throughout this experiment
that the performance of the proposed algorithm is
best in crowded conditions. The use of a statistical
approach and the large number of people allow these
variations in the number of detected points per
person to compensate each other. Moreover, they
diminish remarkably the effect of the error occurred
in motion estimation, causing some outliers in
interest points filtering.
It was shown as well that the presence of a few
still people or non-human moving objects in the
scene could be tolerated into a certain extent,
especially when the scene is crowded.
AnImprovedReal-timeMethodforCountingPeopleinCrowdedScenesBasedonaStatisticalApproach
209
0 20 40 60 80 100 120 140 160 180 200 220
5
10
15
20
25
30
35
Frame Number
Number of People
S1.L1.13-57 View 1
Estimated
Ground Truth
0 20 40 60 80 100 120 140 160 180 200 220
5
10
15
20
25
30
35
40
45
Frame Number
Number of People
S1.L1.13-57 View 2
Estimated
Ground Truth
0 50 100 150 200
0
5
10
15
20
25
30
Frame Number
Number of People
S1.L1.13-59 View 1
Estimated
Ground Truth
Figure 5: Estimated and ground truth number of people versus time for the PETS videos.
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
210
0 20 40 60 80 100 120 140 160 180 200
15
20
25
30
35
40
Frame Number
Number of People
Za.B.0001
Estimated
Ground Truth
0 50 100 150 200 250
0
5
10
15
20
Frame Number
Number of People
B.C.C.0002
Estimated
Ground Truth
0 50 100 150 200 250
0
5
10
15
20
25
Frame Number
Number of People
U.O.B.0003
Estimated
Ground Truth
0 20 40 60 80 100 120 140 160 180 200 220
10
15
20
25
30
35
Frame Number
Number of People
U.O.B.0004
Estimated
Ground Truth
Figure 6: Estimated and ground truth number of people versus time for our set of videos.
AnImprovedReal-timeMethodforCountingPeopleinCrowdedScenesBasedonaStatisticalApproach
211

5 CONCLUSIONS
In this paper, we have presented a real-time method
for counting people in crowded scenes based on a
statistical approach. We took advantage of the work
achieved by Albiol et al. in this field, and we proved
that with minor changes, significant improvement in
accuracy could be accomplished. Furthermore, we
maintained the robustness, simplicity, and
computational efficiency of their algorithm.
The experiments undertaken on a new and more
challenging dataset of video sequences confirmed
the accuracy of the proposed technique in indoor and
outdoor scenarios, and under different viewing and
weather conditions. It also revealed its ability to
handle partial occlusions and perspective effects up
to a certain extent especially in crowded conditions.
REFERENCES
Albiol, A., Silla, M. J., Albiol, A., & Mossi, J. E. M.
(2009). Video analysis using corner motion statistics.
In IEEE International Workshop on Performance
Evaluation of Tracking and Surveillance (pp. 31-38).
Barjatya, A. (2004). Block matching algorithms for
motion estimation. IEEE Transactions Evolution
Computation, 8(3), 225-239.
Bauer, J., Sunderhauf, N., & Protzel, P. (2007).
Comparing several implementations of two recently
published feature detectors. In Proceedings of the
International Conference on Intelligent and
Autonomous Systems (Vol. 6, No. pt 1).
Bay, H., Ess, A., Tuytelaars, T., & Van Gool, L. (2008).
Speeded-up robust features (SURF). Computer vision
and image understanding, 110(3), 346-359.
Chan, A. B., Liang, Z. S., & Vasconcelos, N. (2008).
Privacy preserving crowd monitoring: Counting
people without people models or tracking. In IEEE
Conference on Computer Vision and Pattern
Recognition (CVPR) (pp. 1-7).
Conte, D., Foggia, P., Percannella, G., Tufano, F., &
Vento, M. (2010). A method for counting people in
crowded scenes. In Seventh IEEE International
Conference on Advanced Video and Signal Based
Surveillance (AVSS) (pp. 225-232).
Davies, A. C., Yin, J. H., & Velastin, S. A. (1995). Crowd
monitoring using image processing. Electronics &
Communication Engineering Journal, 7(1), 37-47.
Fradi, H., & Dugelay, J. (2012). People counting system in
crowded scenes based on feature regression. In
Proceedings of the 20th European Signal Processing
Conference (Eusipco) (pp. 136-140).
Huang, C. L., Hsu, S. C., Tsao, I. C., Huang, B. S., Wang,
H. W., & Lin, H. W. (2011). People counting using
ellipse detection and forward/backward tracing. In
First Asian Conference on Pattern Recognition
(ACPR) (pp. 505-509).
Li, J., Huang, L., & Liu, C. (2011, August). Robust people
counting in video surveillance: Dataset and system. In
8th IEEE International Conference on Advanced
Video and Signal-Based Surveillance (AVSS) (pp. 54-
59).
Li, M., Zhang, Z., Huang, K., & Tan, T. (2008).
Estimating the number of people in crowded scenes by
mid based foreground segmentation and head-shoulder
detection. In 19th International Conference on Pattern
Recognition (ICPR) (pp. 1-4).
Merad, D., Aziz, K. E., & Thome, N. (2010). Fast people
counting using head detection from skeleton graph. In
Seventh IEEE International Conference on Advanced
Video and Signal Based Surveillance (AVSS) (pp. 233-
240).
Ma, R., Li, L., Huang, W., & Tian, Q. (2004). On pixel
count based crowd density estimation for visual
surveillance. In IEEE Conference on
Cybernetics and
Intelligent Systems (Vol. 1, pp. 170-173).
Marana, A. N., Velastin, S. A., Costa, L. D. F., & Lotufo,
R. A. (1998). Automatic estimation of crowd density
using texture. Safety Science, 28(3), 165-175.
Nie, Y., & Ma, K. K. (2002). Adaptive rood pattern search
for fast block-matching motion estimation. IEEE
Transactions on Image Processing, 11(12), 1442-
1449.
PETS dataset. (n.d.). Retrieved April 14, 2013 from
http://www.cvg.rdg.ac.uk/PETS2013/a.html.
Rahmalan, H., Nixon, M. S., & Carter, J. N. (2006). On
crowd density estimation for surveillance. In The
Institution of Engineering and Technology Conference
on Crime and Security (pp. 540-545).
Subburaman, V. B., Descamps, A., & Carincotte, C.
(2012). Counting people in the crowd using a generic
head detector. In IEEE Ninth International Conference
on Advanced Video and Signal-Based Surveillance
(AVSS) (pp. 470-475).
Wen, Q., Jia, C., Yu, Y., Chen, G., Yu, Z., & Zhou, C.
(2011). People number estimation in the crowded
scenes using texture analysis based on gabor filter.
Journal of Computational Information Systems, 7(11),
3754-3763.
Zeng, C., & Ma, H. (2010). Robust head-shoulder
detection by pca-based multilevel hog-lbp detector for
people counting. In 20th International Conference on
Pattern Recognition (ICPR) (pp. 2069-2072).
Zhang, E., & Chen, F. (2007). A fast and robust people
counting method in video surveillance. In
International Conference on Computational
Intelligence and Security (pp. 339-343).
Zhao, X., Delleandrea, E., & Chen, L. (2009). A people
counting system based on face detection and tracking
in a video. In Sixth IEEE International Conference on
Advanced Video and Signal Based Surveillance
(AVSS) (pp. 67-72).
ICINCO2014-11thInternationalConferenceonInformaticsinControl,AutomationandRobotics
212
