
On the Design of the EFCOSS Software Architecture
When Using Parallel and Distributed Computing
Ralf Seidler, H. Martin B
¨
ucker, M. Ali Rostami and David Neuh
¨
auser
Chair for Computer Architecture and Advanced Computing, Friedrich Schiller University, Jena, Germany
Keywords:
Parallel and Distributed Computing, Simulation Software, Optimization Software, Software Frameworks,
EFCOSS, Python, Fortran.
Abstract:
Mathematical optimization algorithms are ubiquitous in computational science and engineering where the
objective function of the optimization problem involves a complicated computer model predicting relevant
phenomena of a scientific or engineering system of interest. Therefore, in this area of mathematical software,
it is indispensable to combine software for optimization with software for simulation, typically developed in-
dependently of each other by members of separate scientific communities. From a software engineering point
of view, the situation becomes even more challenging when the simulation software is developed using a par-
allel programming paradigm without taking into consideration that it will be executed within an optimization
context. The EFCOSS environment alleviates some of the problems by serving as an interfacing layer between
optimization software and simulation software. In this paper, we show the software design of those parts of
EFCOSS that are relevant to the integration of a simulation software involving different parallel programming
paradigms. The parallel programming paradigms supported by EFCOSS include MPI for distributed memory
and OpenMP for shared memory. In addition, the simulation software can be executed on a remote parallel
computer.
1 INTRODUCTION
Industry, science, and society are increasingly trying
to model real-world problems using computer simu-
lations. These computer models help to better un-
derstand, analyze, and predict complex phenomena
arising from diverse application areas. Today, there
is a strong and noticeable trend that carefully devel-
oped computer models are not only used to carry out
a mere simulation of scientific and engineering sys-
tems, but they also serve—more and more—as the
starting point for further investigations. For instance,
scientists, engineers, and practitioners are interested
in finding suitable values for input parameters of the
computer model that are a priori unknown or that are
only given with some level of uncertainty. Another
important issue is to design a desired scientific or en-
gineering system in a systematic way, i.e., by a goal-
oriented design rather than by trial and error.
These investigations cannot start before the com-
puter simulation of the given scientific or engineer-
ing system at hand is completed. That is, after hav-
ing developed a sophisticated simulation software,
whose predictions are thoroughly tested and validated
against reality, the scientist, engineer, or practitioner
is capable of going beyond a mere simulation of the
reality. Finding input parameters and designing a sci-
entific or engineering system are only two prominent
examples of mathematical optimization problems. In-
deed, in practical applications, there is an urgent need
for the solutions of such optimization problems. Nu-
merical techniques for the solution of optimization
problems are available in a rich set of optimization
software packages. Each of the underlying optimiza-
tion algorithms has strengths and weaknesses (No-
cedal and Wright, 2006; Dennis and Schnabel, 1983;
Fletcher, 1987; Gill et al., 1981).
In a typical application scenario, there is a simula-
tion software and an optimization software. The sim-
ulation software is typically developed by the commu-
nity that is interested in some application area, for in-
stance, computational fluid dynamics, computational
electrodynamics, or bioinformatics. The optimization
software, on the other hand, is usually developed by
experts from numerical analysis or scientific comput-
ing. From a software engineering point of view, the
challenge is now to bring together the software pack-
ages from these two different communities.
445
Seidler R., Bücker H., Rostami M. and Neuhäuser D..
On the Design of the EFCOSS Software Architecture When Using Parallel and Distributed Computing.
DOI: 10.5220/0004995804450454
In Proceedings of the 9th International Conference on Software Engineering and Applications (ICSOFT-EA-2014), pages 445-454
ISBN: 978-989-758-036-9
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

There are two common scenarios for interfacing
these packages. The first scenario descents from the
point of view of the simulation software. Here, an en-
gineer working with a single simulation package is in-
terested in using different optimization algorithms im-
plemented in individual optimization software pack-
ages. The second scenario originates from the point
of view of the optimization software. Here, a math-
ematician working with a single optimization pack-
age is interested in optimizing different engineering
systems implemented in individual simulation pack-
ages. To combine simulation and optimization soft-
ware, researchers have previously introduced a soft-
ware framework called EFCOSS (Rasch and B
¨
ucker,
2010).
A related, but different approach is followed by
the Toolkit for Advanced Optimization (TAO) (Mun-
son et al., 2012; Benson et al., 2001; Kenny et al.,
2004). This component-based optimization software
is designed for the solution of large-scale optimiza-
tion problems. TAO is capable of solving prob-
lems in the areas of nonlinear least squares, uncon-
strained minimization, bound constrained optimiza-
tion, and general nonlinear optimization. It is not
specifically designed for the solution of optimal ex-
perimental design (OED) problems. The software
package VPLAN (K
¨
orkel, 2002) supports OED and
parameter estimation for systems of differential alge-
braic equations. This software is mainly used for the
solution of problems arising from process engineer-
ing. More related work is given in (Rasch and B
¨
ucker,
2010).
The new contribution of the present paper is
twofold. First, we propose a novel software archi-
tecture for EFCOSS that is based entirely on Python.
Second, we introduce to EFCOSS different ways of
parallelism. Since, in real-world applications, the
main computational effort is typically spent in the
simulation software rather than in the optimization
software, the focus of the present paper is on paral-
lelism in the simulation software. In addition, paral-
lelism can also be exploited in EFCOSS when solving
multiple different optimization problems simultane-
ously (Seidler et al., 2014).
The structure of this paper is as follows. In Sect. 2,
the new Python framework is introduced and an ex-
ample demonstrating its use is shown in Sect. 3. Sec-
tion 4 shows how EFCOSS interfaces with any sim-
ulation software that uses a parallel programming
paradigm for distributed or shared memory. Section 5
then demonstrates how distributed computing is en-
abled where the simulation software is executed on
a remote computer. Finally, Sect. 6 summarizes the
findings of this paper and gives concluding remarks.
2 THE EFCOSS FRAMEWORK
The Environment for Combining Optimization and
Simulation Software (EFCOSS) (Rasch and B
¨
ucker,
2010) is a software framework facilitating the solution
of different types of optimization problems. Through-
out this paper we consider an optimization problem of
the form
min
x
g(x) subject to u(x) = 0, (1)
where the symbols g and u denote smooth, real-valued
functions on a subset of R
n
. Here, g is the objective
function, while u is the equality constraint. For the
sake of simplicity, we do not describe multiple equal-
ity constraints nor do we consider inequality con-
straints; both can also be handled by EFCOSS.
An illustrating example of an important class of
optimization problems of type (1) consists of the data
fitting problem described by the objective function
g(x) =
D
d − f (x)
, (2)
where
D := diag(ω
1
,ω
2
,...,ω
m
) ∈ R
m×m
(3)
is a diagonal matrix used to scale the entries of the
residual vector
r(x) := D
d − f (x)
∈ R
m
. (4)
Here,
f : R
n
→ R
m
is a vector-valued function representing the simula-
tion of a scientific or engineering problem of inter-
est and the vector d ∈ R
m
denotes some measure-
ment data obtained for some property predicted by the
function f .
We take this data fitting problem as a simple ex-
ample to illustrate the functionality of EFCOSS. The
overall structure of EFCOSS is depicted in Fig. 1.
This high-level perspective is tailored toward the data
fitting example. During the execution of an opti-
mization algorithm, the optimizer requests the eval-
uation of the objective function g at a point x
0
from
Optimization
EFCOSS
Simulation
x
r(x)
r'(x)
u(x)
x,y
f(x)
f'(x)
Objective
Function
r(x)
r'(x)
f(x)
f'(x)
Constraint
Function
u(x) f(x)
Figure 1: High-level EFCOSS architecture.
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
446

EFCOSS. Since the objective function needs the eval-
uation of the simulation f at the same point x
0
,
EFCOSS sends a corresponding request to the sim-
ulation software, possibly also transferring some ad-
ditional data y that are necessary to run the simulation
software. EFCOSS is also supporting the technology
of automatic differentiation (AD) to compute deriva-
tives of computer programs (Griewank and Walther,
2008; Rall, 1981). Given a computer program, an AD
software tool automatically generates a new code ca-
pable of computing the derivatives of the function im-
plemented by the given code. EFCOSS automatically
generates interfaces for this AD code. So, EFCOSS
gets not only the value of f (x
0
), but also its Jacobian
matrix f
0
(x
0
) := ∂ f /∂x evaluated at the same point x
0
.
A similar procedure holds for the evaluation of the
constraint function u(x
0
) and its derivative.
In addition to solving problems with an objec-
tive function of type (2), EFCOSS is also designed to
solve more advanced optimization problems. In par-
ticular, it supports objective functions common in op-
timal experimental design (Pukelsheim, 2006), a topic
which is not considered in the present paper.
EFCOSS initially relied entirely on distributed
computing using the CORBA framework (Object
Management Group, 2012). In practical applications
solving real-world optimization problems, CORBA
turned out to be particularly unpleasant for practition-
ers from outside of computer science. Since CORBA
is also outdated and has several severe drawbacks
(Henning, 2008), we removed CORBA. The new soft-
ware design is based entirely on the flexible Python
programming language using Numpy and Scipy data
types and their primitives (Oliphant, 2007). Also, in
the new design, the distributed approach is no longer a
necessity, but can optionally be reinstalled by the use
of Python Remote Object (PyRO) (de Jong, 2013);
see the discussion in Sect. 5.
The implementation of EFCOSS consists of sev-
eral Python classes. The main class of the frame-
work is EFCOSS. In addition, the class Simulation
serves as the Python interface to the simulation soft-
ware. There are different interfaces for various opti-
mization software packages. In the current version of
EFCOSS, we provide interface codes for the follow-
ing optimizers:
• ELSUNC (Wedin and Lindstr
¨
om, 1988; Lind-
str
¨
om and Wedin, 1999),
• ENLSIP (Wedin and Lindstr
¨
om, 1988; Lindstr
¨
om
and Wedin, 1999),
• FFSQP (Lawrence and Tits, 1996), and
• PORT (Gay, 1990).
There are also several freely available optimizers
within the Scipy optimize package, which can also
be used in a simple and straightforward way (The
Scipy Community, 2013). We have successfully
tested
• fmin
cobyla,
• fmin l bfgs b, and
• leastsq.
In addition, there are some utility functions for
generating interfaces to simulation codes and their
derivatives.
3 USING EFCOSS
Let us examine EFCOSS by considering the follow-
ing data fitting problem taken from the Minpack-2 test
suite (Averick et al., 1992). Let
f
i
(x) = x
1
+ x
2
· e
−x
4
t
i
+ x
3
· e
−x
5
t
i
with t
i
= 10 · (i − 1) and i ∈ {1, . . . , m} denote some
exponential functions. From these m scalar-valued
components f
i
, we construct the vector-valued func-
tion
f : R
5
→ R
m
that takes x
1
, x
2
, x
3
, x
4
and x
5
as input. In this paper,
this simple function is used to mimic an actual simu-
lation software which would be much more complex
in real-world applications. The minimization prob-
lem consists of (1) with the objective function (2)
where n = 5 parameters are fitted and d is a given m-
dimensional vector. To find a solution, different opti-
mization software packages can be used. Here, we use
the opt elsunc interface to the optimizer ELSUNC.
In Fig. 2, a Fortran code for evaluating f (x) is
given by a subroutine called sim. The result of f (x)
is returned in the variable fvec.
If the minimization problem is solved for the first
time the corresponding derivative code needs to be
generated by an AD software tool. In this example,
the derivative code is transformed by the AD tool
subroutine sim ( x1 ,x2 ,x3 ,x4 ,x5 , fvec , m )
integer m
double precision x1 ,x2 ,x3 , x4 ,x5
double precision f ve c (m )
integer i
double precision temp , te mp1 , tem p 2
do i = 1, m
te mp = db le ( 10 *( i -1) )
te mp1 = e xp (- x4 * te mp )
te mp2 = e xp (- x5 * te mp )
fv ec (i ) =( x1 +x2 * te mp 1 +x 3 * temp 2 )
end do
end
Figure 2: A toy example of a simulation code taken from
the Minpack-2 test collection.
OntheDesignoftheEFCOSSSoftwareArchitectureWhenUsingParallelandDistributedComputing
447

SUBROUTINE S I M_D V (x1 , x1d , x2 , x2d , x3 , x3d , &
& x4 , x4d , x5 , x5d , fv ec , fve cd , m , nb d irs )
USE D I F F SIZ E S
IMPLICIT NONE
INTEGER :: m
DOUBLE PRECISION :: x1 , x2 , x3 , x4 , x5
DOUBLE PRECISION, DIMENSION( n b d irs m a x ) : : x1d , &
& x2d , x3d , x4d , x5d
DOUBLE PRECISION :: f ve c (m )
DOUBLE PRECISION :: f vec d ( nb dir sm a x , m)
INTEGER :: i
DOUBLE PRECISION :: tem p , t emp1 , t em p 2
DOUBLE PRECISION, DIMENSION( n b d irs m a x ) : : &
& temp1d , te m p2d
INTRINSIC D BL E
INTRINSIC EXP
DOUBLE PRECISION :: a rg 1
DOUBLE PRECISION, DIMENSION( n b d irs m a x ) : : ar g 1d
INTEGER :: nd
INTEGER :: n b di r s
DO nd =1 , nbdi r s
fv ecd (nd , :) = 0. D0
END DO
DO i =1 , m
te mp = DB LE ( 10 *( i -1) )
ar g1 = -( x4 * tem p )
DO nd =1 , nbdi r s
ar g1d ( nd ) = -( tem p * x4d ( nd ))
te m p1 d ( nd ) = arg 1d ( nd ) * E XP ( arg 1 )
ar g1d ( nd ) = -( tem p * x5d ( nd ))
END DO
te mp1 = E XP ( arg 1 )
ar g1 = -( x5 * tem p )
te mp2 = E XP ( arg 1 )
DO nd =1 , nbdi r s
te m p2 d ( nd ) = arg 1d ( nd ) * E XP ( arg 1 )
fv ecd (nd , i ) = x 1d (n d ) + x2d ( nd )* tem p 1 + x2 *&
& te m p1 d ( nd ) + x3 d ( nd ) * tem p2 + x 3 * te mp 2 d (nd )
END DO
fv ec (i ) = x1 + x2 * temp 1 + x3 * te m p2
END DO
END SUBROUTINE S I M_D V
Figure 3: Code automatically generated via the AD tool
Tapenade from the code given in Fig. 2.
Tapenade (Hasco
¨
et and Pascual, 2013). The code
sim dv resulting from transforming the code in Fig. 2
is listed in Fig. 3.
An EFCOSS problem definition consists of a
Python class used to steer all desired operations. This
definition must be written by the user and, in our ex-
ample, consists of the following methods:
• initEFCOSS() to initialize EFCOSS,
• initAD() to generate simulation interfaces,
• initSim() to initialize the simulation,
• run elsunc() to execute the optimization algo-
rithm.
In a runtime script, these methods can then easily be
called as desired by the user. In addition, there is the
possibility to interactively steer the execution from a
console. Another option would be to write a graphical
user interface on top of EFCOSS.
We now describe each of these methods in more
detail. To initialize EFCOSS, we specify the variables
and their values within EFCOSS. As shown in Fig. 4,
this can be done with the method initEFCOSS() from
the class OptimizeSim. Here, we first declare an in-
stance of EFCOSS and assign the name sim for logging
from ef c o s s _ util i t i e s import *
from n ump y import *
from E F COS S import E F CO S S
class Op t i miz e S i m :
def in i t EFC O S S ( se lf ):
se lf . op t = EF C OS S (" sim ")
ge t E F C OSS R e f ( sel f . opt )
m = se lf . opt . n e w Inp u t V a r i able ( " m " ,33)
x1 = se lf . opt . n e w Inp u t V a r i able ( " x1 " ,0. 5)
# same for x2,x3,x4,x5
...
fv ec = se lf . op t . newO u t p u t V aria b l e (" f ve c ", m )
setS i m u l a t i o n C a l l i n gSequ e n c e ([ x1 ,x2 ,x3 ,x4 , x5 ,
fvec , m ])
se t O p tVa r s ([ x1 , x2 ,x3 ,x4 ,x5 ])
obj = se lf . op t . s e tObj e c t i v e F u n ctio n ( " Dat a Fit " ,
" Dat a F i t1 d ")
in di ce s , data , weig h ts = r e a d D ata F i l e 1 d (" dat a .
txt " )
obj . ad d Dat a 1 d (f vec , indice s , data , we igh t s )
Figure 4: Method initEFCOSS() to initialize EFCOSS.
purposes. Then, we set a global reference to that ob-
ject using the method getEFCOSSRef(), followed by
the definition of the input and output variables of the
sample simulation sim, which evaluates the m compo-
nents of the function f (x). The dimension of the out-
put variable fvec is defined by the input variable m.
The input variables corresponding to the parameter
vector x are defined using scalar floating-point val-
ues in this example. Then, the calling sequence of
the simulation software is set according to the Fortran
code of sim as given Fig. 2.
Next, the free parameters of the optimization need
to be defined with the method setOptVars(). They
are needed to generate the derivative code of sim via
an AD tool. The last three statements are used to de-
fine the residual r(x). Here, the one-dimensional data
fitting problem represented by (2)–(4) is defined by
the class DataFit.DataFit1d loaded by the method
setObjectiveFunction(). The values of d are
read by readDataFile1d() from the file data.txt.
The vector d involved in the residual r(x) is set by
addData1d(), where the weights ω
i
in (3) are all set
to 1.0, since scaling is not necessary in this exam-
ple. However, EFCOSS supports this form of scaling
because, for more complicated problems, scaling can
become crucial for numerical stability.
Next we discuss the method initAD(), also from
the class OptimizeSim, which is given by
def i n itA D ( se lf ) :
from ef c o s s _co d e g e n import ge n e r a t e Ser v e r I F
AD _ Too l =" ta p ena d e "
gen e r a t e S erv e r I F (" sim "," simI F .f90 " ,A D _To o l )
It generates the interfaces for the function sim
and its derivative sim
dv. More precisely, the
method generateServerIF() from the package
efcoss codegen generates this Fortran inter-
face simIF.f90. This interface connects the
simulation software written in Fortran to the
EFCOSS class Simulation and consists of the
subroutines Func(iInput,dInput,Output) and
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
448

Jacobian(iInput,dInput,s info,Output,Jac).
The input vectors of the simulation and its derivatives
are split into integer and double precision vectors
denoted by iInput and dInput, respectively. Inside
the interface, the values of these vectors are used
to create input variables to the simulation. In the
following text, we will merge these two input vectors
into a single variable Input for better readability.
The results of the Func interface are copied to the
vector Output in a linear fashion. The Jacobian in-
terface returns the output in dJac and contains the ad-
ditional input s info. This array is an automatically
generated vector necessary to generate the so-called
seed matrix commonly used in AD. Given a seed ma-
trix S, the AD-generated code computes the matrix-
matrix product f
0
· S without explicitly computing the
Jacobian f
0
, thus potentially saving memory and stor-
age. In this example, the seed matrix is set to the 5 ×5
identity matrix to compute f
0
.
The interface code is compiled and linked as fol-
lows:
1. gfortran -c -fPIC sim.f90 sim dv.f90
2. ar -r libsim.a sim.o sim dv.o
3. f2py -c -m sim simIF.f90 -L. -lsim
First, we compile the source sim.f90 and its deriva-
tive sim dv.f90 with gfortran and put them into a
static library libsim.a. This library can then easily
be used with f2py when generating the shared object
sim.so as the interface code to Python.
When the interface is compiled, EFCOSS needs
to load this object. This is the purpose of the next
method from the class OptimizeSim. This method
initSim() reads as follows:
def i n i tS i m ( se lf ) :
from si m u lat i o n import S i m u lat i o n
sim = Si m u lat i o n ( se lf . opt ," s im ")
se lf . op t . s etSi m u l a t i o n Serv e r ( s im )
It gives the name of the object file sim to the
Simulation class. This object is then made available
to EFCOSS in the last statement.
From the class OptimizeSim, we finally discuss
the method run elsunc() depicted in Fig. 5. The
ELSUNC optimizer can now be used to find an opti-
mal solution of the data fitting problem. As a starting
vector of the optimization, we use the initial values
for x
1
,...,x
5
defined within EFCOSS. These can be
retrieved by the method getInitialValues(). The
length of the result vector of g(x) is given by the func-
tion lResidualVector(). The remaining part of this
method is used to steer the optimizer, e.g., the value
of p[2] = 100 sets the maximal number of iterations
to be carried out by the optimizer to 100.
Figure 6 illustrates the data flow from the opti-
mization to the simulation software and back. The
def ru n _ els u n c ( se lf ):
import op t _ els u n c
el s un c = o p t _el s u nc . o pt _ e l sun c ( s el f .opt )
in i tva l = getI n i t i a l Valu e s ()
n = len ( ini t val )
m = lR e s i d u alV e c t o r ()
x = a rra y (in it va l , f l oat 6 4 )
mdc = m
mdw = n * n +5* n+ 3* m +6
p = a rra y ( [0] * ( 1 1 +2 * n) , i n t3 2 )
w = a rra y ([0 . 0]* mdw , floa t 64 )
p [ 0] = 0
p [ 1] = 6
p [ 2] = 100
p [ 4] = 2
w [ 0 :4 ] = 1.0 E -6
bnd = 1
bl = arr ay ( [ -1 00. 0] * n , flo a t64 )
bu = arr ay ( [ 1 00 . 0 ]* n , f l o at 6 4 )
info , fv ec , cov = e lsu n c . el s unc (x , mdc , m ,
bnd , bl ,bu ,p ,w )
Figure 5: Method run elsunc() for executing the EL-
SUNC optimizer with the example.
optimizer for a data fitting problem needs to evaluate
the residual vector r at the current parameter vector x.
This is done by calling evalfvec(). The method
vectorfunction() builds up the input vector Input
to the simulation. This input vector consists of the
values of x as well as additional input y that is defined
by initEFCOSS(). In this example, the only addi-
tional input is the integer variable m. After calling the
simulation via the Python interface Function(), the
value of f (x) is returned. The residual r(x) is finally
computed in vectorfunction().
Again, we stress that, in real-world applications,
Phyton
call f2py interface
Optimizer
x
r(x)
Input
f(x)
x
r(x)
f(x)
Input=x,y
sim.Func()
Simulation.Function()
Datafit.vectorfunction()
EFCOSS.evalfvec()
Fortran
simIF.f90
Func(Input,Output)
sim(x1,x2,...,xn,fvec,m)
split Input:
m,x1,x2,...,xn
collect f(x)
in Output
Jacobian(...)
sim_dv(...)
Figure 6: Schematic high-level overview of the data flow in
an iteration of the optimization process.
OntheDesignoftheEFCOSSSoftwareArchitectureWhenUsingParallelandDistributedComputing
449

the simulation code for evaluating the function f (x)
will be more complicated than the simplistic exam-
ple sketched in Fig. 2. In an actual example from a
geoscientific application which is described in more
detail in (Seidler et al., 2014), the simulation code is
given by
subroutine s h ema t (pP0 , pK0 , pN0 , pTma x , ppar m0 ,&
pdhead , pdtemp , pdco nc , pxco o rd )
Here, the function f (x) represents the computation of
the head pdhead, temperature pdtemp, and concen-
tration pdconc of a geothermal reservoir from a given
set of geological parameters represented by pparm0.
The code resulting from transforming this code via
automatic differentiation reads
subroutine g_ s h e mat_ p r o c (ad_ p_ , pP0 , pK0 , pN0 , p Tmax ,&
pparm0 , g _p par m0 , pdhe ad , g_p dh ea d , p dt em p ,&
g_ pd tem p , pdc on c , g_p dco nc , pxc oo rd , pZ min , &
pZm ax , o mp_ in n er , om p _ ou t e r )
In this automatically generated code, the multidi-
mensional arrays g pdhead, g pdtemp, and g pdconc
store the derivatives of head, temperature, and con-
centration with respect to the geological parameters.
That is, these three arrays store the Jacobian matrix f
0
.
4 PARALLELIZED SIMULATION
Simulation software arising from real-world applica-
tions in science and engineering tend to require a large
amount of computing time and storage. To cope with
the long running times and the high storage require-
ments, it is often mandatory to run these simulations
on parallel processors. For very large-scale problems,
the simulation software has to be executed on a high-
performance parallel computer typically installed at a
computing center. For problems with a moderate stor-
age requirement, parallelism is also relevant when the
simulation is run on a single multicore workstation or
laptop.
One of the strengths of EFCOSS is its tight inte-
gration with parallelized simulation software. That is,
EFCOSS supports the solution of optimization prob-
lems where the simulation software is parallelized.
More precisely, EFCOSS can integrate simulation
software based on parallel programming paradigms
for both shared-memory and distributed-memory sys-
tems. In this section, we will demonstrate how
EFCOSS supports the two dominant parallel pro-
gramming paradigms OpenMP and MPI.
OpenMP: Today, OpenMP is the de-facto standard
for shared-memory parallel programming. This paral-
lel programming paradigm is mainly used for a mod-
erate number of concurrent threads. OpenMP consists
subroutine sim (x1 ,x2 , x3 ,x4 ,x5 ,f vec , m )
...
!$OMP parallel
!$OMP do private(i,temp,temp1,temp2)
do i = 1, m
te mp = db le ( 10 *( i -1) )
te mp1 = e xp (- x4 * te mp )
te mp2 = e xp (- x5 * te mp )
fv ec (i ) =( x1 +x2 * te mp 1 +x 3 * temp 2 )
end do
!$OMP end do
!$OMP end parallel
end
Figure 7: OpenMP-parallelized version of sim from Fig. 2.
of a set of compiler directives and a runtime library.
In OpenMP, parallelization is carried out by insert-
ing certain directives to a serial code (Chapman et al.,
2008; OpenMP Architecture Review Board, 2013).
Therefore, an OpenMP-parallelized program differs
only slightly from the serial program. Consider the
code in Fig. 7 as an illustrative example. This figure
shows the OpenMP-parallelized version of the simu-
lation code given in Fig. 2. In this example, the for
loop does not depend on the order of its iterations.
Therefore, it can be parallelized. The iterations of the
loop are distributed to a team of threads. In shared-
memory parallel programming, each OpenMP thread
has access to the result vector fvec. However, the
variables specified in the private clause are repli-
cated as local copies to each thread. Since each thread
is writing to a different part of the vector fvec the par-
allelization is correct.
To solve a single optimization problem, EFCOSS
is executed in a single process p. Therefore, calling a
function from an OpenMP-compiled library is feasi-
ble. Since an OpenMP-parallelized program is final-
ized with a barrier at the end of a parallel region, the
computation of the process p is resumed without syn-
chronization problems. Notice that the OpenMP flag
is needed in the compilation as well as in the f2py
command building the interface. The complete com-
mand sequence is as follows:
1. gfortran -c -fopenmp -fPIC sim.f90
sim dv.f90
2. ar -r libsim.a sim.o sim dv.o
3. f2py --f90flags=’-fopenmp’ -c -m sim
simIF.f90 -L. -lsim -lgomp
MPI: Another parallel programming model which is
mostly employed in large-scale applications is the
distributed-memory paradigm. Currently, the dom-
inant distributed-memory programming paradigm is
the Message Passing Interface (MPI) (Snir et al.,
1995; Snir et al., 1998; Gropp et al., 1998). In com-
parison to OpenMP, programs written in MPI require
major changes to the serial code. These changes are
required, as the whole data structure of the program,
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
450

subroutine sim (x1 ,x2 , x3 ,x4 ,x5 ,f vec , m )
use mpi
integer m , lo ca l_ m , pran k , psi z e
double precision x1 ,x2 ,x3 , x4 ,x5 , f ve c (m )
double precision, allocatable:: l oc a l (:)
integer i
double precision temp , t emp1 , t em p 2
real t1 ,t2
call mp i _ c omm_ r a n k ( m pi _ c om m _ wo r l d , p rank , ierr )
call mp i _ c omm_ s i z e ( m pi _ c om m _ wo r l d , p size , ierr )
lo c al_ m = m / psi ze
allocate( l oca l ( loc a l_m ))
do i = 1, l o cal _ m
k= i + p r an k * l oca l _m
te mp = db le ( 10 *( k -1) )
te mp1 = e xp (- x4 * te mp )
te mp2 = e xp (- x5 * te mp )
lo cal (i ) =( x1 +x2 * temp 1 +x 3 * tem p 2 )
end do
call mp i _ gat h e r (loc al , l oc al _m , &
& M P I _ DOU B L E _PR E C I SIO N , fvec , loc al _m , &
& M P I _ DOU B L E _PR E C I SIO N , MP I _I N _PL A CE ,&
& M P I_C O MM_ W ORL D , ier r )
end
Figure 8: MPI parallelization of the code given in Fig. 2.
specifically all arrays, have to be explicitly decom-
posed. Communication between different processes
is specified via send and receive commands. Here,
since an array is distributed over different processes,
each process has access to its own part of that ar-
ray. To access other parts of the array, communica-
tion is needed between processes. Hence, any op-
eration which needs the whole array is a bottleneck.
However, in our example, each process computes its
own local part independently and the communication
is only needed to gather all parts of the array at the
end.
Figure 8 shows the MPI-parallelized code of the
example given in Fig. 2. Here, the array local of
size local m is the working array of each process.
The MPI function MPI GATHER gathers the results
of the separate processes and stores it in the array
fvec of the master process. The derivative subroutine
sim dv() is parallelized in a similar way. However,
in a real-world MPI code, the programmer might have
used calls to the mpi init() and mpi finalize()
routines in its simulation code. These calls need
to be commented out beforehand to prevent errors.
The Python package mpi4py takes care of these calls
(Dalc
´
ın et al., 2005).
EFCOSS is capable of generating MPI-
enabled interface code, by adding mpi=1 to the
generateServerIF() method. We also imple-
mented another class, SimulationMPI, that adds
MPI functionality to the Python simulation code.
This class has to be used in the initSim() method
instead of the class Simulation.
The idea of using MPI-parallelized simulations in
EFCOSS is to use a master-worker principle. The
execution of the optimization algorithm is started in
just one MPI process whose MPI rank is 0. We re-
fer to this process as the master process. The re-
def ru n _ f u n c t ion_ w o r k e r ( sel f ) :
x= ge tIni t i a l V a lues ()
res = sel f .o pt . e v alf j a c (0 ,x ,33)
Figure 9: Running the simulation as a worker MPI-process.
maining MPI processes are used as worker processes
that create a basic EFCOSS instance and execute
the method run function worker(). The corre-
sponding worker code is presented in Fig. 9. The
master process is supposed to execute the method
run elsunc().
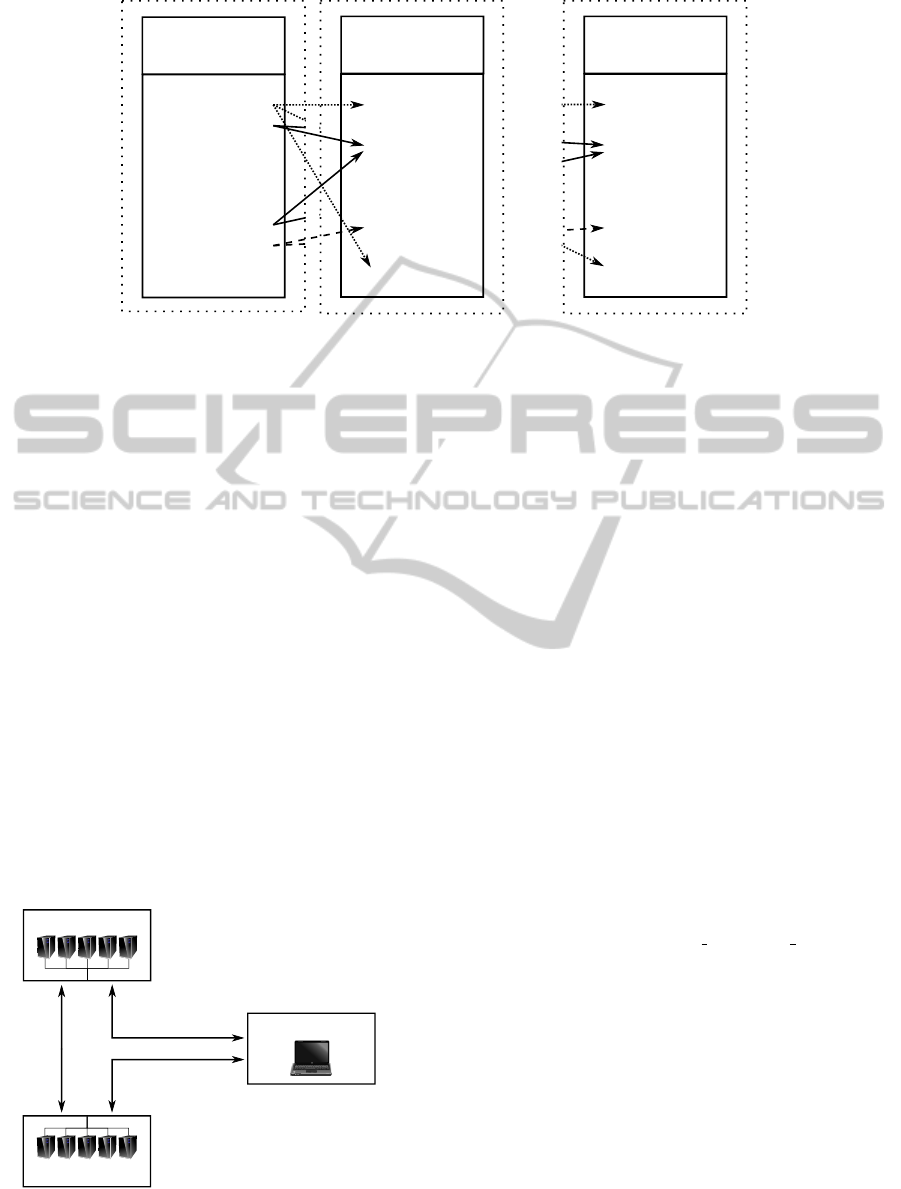
Let us now describe the situation in the interfaces
for the master and workers with the help of Fig. 10.
The master process is executed as described before.
It first evaluates the subroutine Func() and then the
derivative subroutine Jacobian(). As described in
Fig. 6, these two routines are used by the optimizer
to compute the next parameter vector x. In addition,
the master is responsible for sending a variable k that
is used to control the different tasks executed by the
workers. More precisely, the value k=1 is used to
signal that the workers will execute the simulation.
The value k=2 represents the execution of the deriva-
tive code. When the master is terminated, it sends to
the workers the value k=0 to signal the termination of
their programs as well.
A worker, on the other hand, starts the
evalfjac() method from the EFCOSS class. That is,
it starts the Jacobian interface wrapper Jacobian().
In this interface, the worker at first receives the vari-
able k. After receiving the value k=1 the worker en-
ters a loop that can only be exited when the master
sends k=0. Next, the master’s input vector is sent
to all workers. Depending on the value of k, all the
processes start either the simulation code sim() or its
derivative code sim dv(). In the case of the deriva-
tive code, the master also sends the vector s info to
the workers. The workers receive this additional input
to the derivative code before they start the derivative
code. Finally, the workers wait for the next k and the
master continues with the optimization algorithm.
The user must take care of the correct starting
of the master and workers. An example of a run-
time script for this purpose is shown in Fig. 11.
First, the MPI environment is set up by retrieving the
rank of the process on which the MPI code is ex-
ecuted. Then, EFCOSS is initialized and the sim-
ulation is set up. The master process starts its op-
timization with ELSUNC, while the workers start
the run function worker() method. When the
optimization algorithm is finished, the Finalize()
method of the SimulationMPI class is executed. So,
the workers are also terminated.
OntheDesignoftheEFCOSSSoftwareArchitectureWhenUsingParallelandDistributedComputing
451
Jacobian():
recv(k)
while(k!=0)
recv(input)
if (k=1)
sim()
else
recv(s_info)
sim_dv()
recv(k)
end while
Func():
send(k=1)
send(input)
sim()
Jacobian():
send(k=2)
send(input)
send(s_info)
sim_dv()
process 0
(master)
Jacobian():
recv(k)
while(k!=0)
recv(input)
if (k=1)
sim()
else
recv(s_info)
sim_dv()
recv(k)
end while
process 1
(worker)
process n
(worker)
...
Figure 10: Using Fortran simulation interfaces in conjunction with MPI.
from Op t i miz e S i m import Op t i miz e S i m
from m p i4p y import MPI
co mm = MP I . COM M _ W ORL D rank = co mm . Ge t _ra n k ()
d= Opti m i z eSi m () d. i n i t EFC O S S () d . in itS i m ()
if ( r an k == 0) :
d. run_ e l s un c ()
d. o pt . S imu l a t ion . Fin a l ize ()
else:
d. ru n _fun c t i o n _ w o rker ()
Figure 11: Runtime script for the solution of an optimiza-
tion problem where the simulation is parallelized with MPI.
5 REMOTE SIMULATION
When the focus is on large-scale problems, it is not
uncommon that an optimization or simulation soft-
ware is tuned for a particular high-performance com-
puting system. In general, not all the optimization and
simulation software packages are available on all sys-
tems. We therefore suggest an approach based on dis-
tributed computing. This enables the combined use of
Simulation
Optimization
Steering/Setup
Figure 12: Remote object principle illustrating the general
possibilities for distributed computing in EFCOSS. (Clip-
arts from openclipart.org.)
(i) a dedicated simulation workstation or cluster, (ii)
a dedicated optimization workstation or cluster, and
(iii) a dedicated steering workstation. The resulting
remote object principle is shown in Fig. 12.
In this paper we focus on parallelism involved in
the simulation. We could also envision a situation
where the optimization algorithm is executed in par-
allel. However, the overall runtime is typically domi-
nated by the simulation and its derivatives rather than
by the optimization algorithm. So, we do not discuss
in this paper a distributed approach for a parallel op-
timization algorithm. Rather we consider distributed
computing for a parallel simulation. To this end, let
the optimization algorithm as well as the steering and
setup be serially executed on some machine. The sim-
ulation is then run on a different server, using an MPI-
parallelized code as discussed in the previous section.
We use the version 4.24 of the Python Remote
Object (PyRO) library (de Jong, 2013) for distribut-
ing Python objects. An example starting a simulation
server is shown in Fig. 13. This example shows the
MPI server code that starts a PyRO daemon on the
master process (rank=0). The other processes just
initialize the OptimizeSim class as stated before and
start the runtime loop with run function worker(),
shown in Fig. 9. As of PyRO version 4.18, the de-
fault serializer for sending objects is set to serpent.
This serializer is currently not capable of transferring
numpy data types. To overcome this issue, we con-
tinue to use the pickle serializer instead. Pickling is
a standard serialization protocol in Python, which has
drawbacks with respect to security. We assume that
this issue is solved in the next versions of PyRO so
that the serpent serializer can also transfer numpy
data types.
To correctly communicate with the remote simu-
lation server, the EFCOSS instance running the opti-
mization algorithm needs a new initialization method
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
452

from si m u lat i o n import Si m u l ati o n M P I
from Op t i miz e S i m import Op t i miz e S i m
import P yro 4
from m p i4p y import MPI
Py ro4 . c onf i g . SER I A L IZE R = ’ p i ck l e ’
Py ro4 . c onf i g . S E RIAL I Z E R S _ A C C EPTE D . a dd (
’ p ic k le ’)
def m ai n () :
co mm = MP I . COM M _ W ORL D
ra nk = com m . Ge t _ ran k ()
si ze = com m . Ge t _ siz e ()
if ( r an k == 0) :
si m u l ati o n = S i m u lat i o n M P I ( mod n ame =" sim ")
Py ro4 . D aem o n . ser v e S i mpl e (
{ simu l a tio n :
" e f cos s . S i mul a t ion " } ,
ns = Fa ls e )
else:
d= Opti m i z eSi m ()
d. init E F C OS S ()
d. ini t Sim ()
d. ru n _fun c t i o n _ w o rker ()
if _ _ n ame _ _ == " __ m ain _ _ ":
ma in ()
Figure 13: Python code for a remote MPI simulation server
using PyRO.
for the simulation. A corresponding code is given in
Fig. 14. This is a simple example illustrating the cre-
ation of a server process. Here, PyRO is used without
a nameserver. The PyRO object of the simulation is
retrieved by entering its universal resource identifier
(URI), which the daemon prints on the remote ma-
chine.
def in i t S imRe m o t e ( se lf ) :
uri = inpu t (" Ent e r UR I of S i mul a t i on S erv e r : " ) .
st rip ()
sim = Pyro 4 . Pr o xy ( ur i )
sim . se t R e sul t V e c ( se lf . opt . g e tRe s u l t Vec () )
sim . se t Jac V e c ( se lf . opt . get J a cVe c () )
se lf . op t . s etSi m u l a t i o n Serv e r ( s im )
Figure 14: Python code to retrieve a remote object from the
simulation server.
6 CONCLUSIONS
An important class of problems arising in science
and engineering is to solve mathematical optimiza-
tion problems including data fitting problems, where
a suitably-defined objective function is minimized. A
typical objective function involves the evaluation of a
mathematical function that is represented by a com-
plicated simulation code. The scenario we consider
in this paper consists of bringing together an opti-
mization software package with a simulation package
via the simple and user-friendly software framework
EFCOSS, the Environment for Combining Optimiza-
tion and Simulation Software.
Today, many scientific and engineering software
packages involve some sort of parallelism. The
most prominent parallel programming paradigms are
OpenMP for shared-memory computers and MPI for
systems with distributed memory. With the help of
an illustrative example, we presented the feasibil-
ity of using EFCOSS to solve optimization problems
that involve simulation codes using either OpenMP or
MPI. Though not explicitly described, there is room
for another viable approach in which a combination
of OpenMP and MPI is used in a hybrid fashion. Fur-
thermore, EFCOSS facilitates distributed computing
by means of the publicly available Python Remote
Object package PyRO.
Similar to the coupling of a simulation software
package to EFCOSS, it is also relevant to consider
the situation where developers of optimization pack-
ages are interested in interfacing their software with
a simulation using EFCOSS. This is an ongoing work
which will be described elsewhere.
ACKNOWLEDGEMENTS
This work is partially supported by the German Fed-
eral Ministry for the Environment, Nature Conserva-
tion and Nuclear Safety (BMU) within the project
MeProRisk II, contract number 0325389 (F) as well
as by the German Federal Ministry of Education and
Research (BMBF) within the project HYDRODAM,
contract number 01DS13018.
REFERENCES
Averick, B. M., Carter, R. G., Mor
´
e, J. J., and Xue, G.-
L. (June 1992). The MINPACK-2 test problem col-
lection. Technical Report MCS–P153–0692, Argonne
National Laboratory.
Benson, S. J., Curfman McInnes, L., and Mor
´
e, J. J. (2001).
A case study in the performance and scalability of op-
timization algorithms. ACM Transactions on Mathe-
matical Software, 27(3):361–376.
Chapman, B., Jost, G., Van der Pas, R., and Kuck, D. J.
(2008). Using OpenMP: Portable shared memory
parallel programming. MIT Press, Cambridge, Mass.,
London.
Dalc
´
ın, L., Paz, R., and Storti, M. (2005). MPI for
Python. Journal of Parallel and Distributed Comput-
ing, 65(9):1108–1115.
de Jong, I. (2013). Pyro – Python Remote Objects.
http://pythonhosted.org/Pyro4.
Dennis, Jr., J. E. and Schnabel, R. B. (1983). Numerical
Methods for Unconstrained Optimization and Nonlin-
ear Equations. Prentice-Hall, Englewood Cliffs.
Fletcher, R. (1987). Practical Methods of Optimization.
John Wiley & Sons, New York, 2nd edition.
OntheDesignoftheEFCOSSSoftwareArchitectureWhenUsingParallelandDistributedComputing
453

Gay, D. M. (1990). Usage summary for selected optimiza-
tion routines. Computing Science Technical Report
153, AT&T Bell Laboratories.
Gill, P. E., Murray, W., and Wright, M. H. (1981). Practical
Optimization. Academic Press, New York.
Griewank, A. and Walther, A. (2008). Evaluating Deriva-
tives: Principles and Techniques of Algorithmic Dif-
ferentiation. Number 105 in Other Titles in Applied
Mathematics. SIAM, Philadelphia, PA, 2nd edition.
Gropp, W., Huss-Lederman, S., Lumsdaine, A., Lusk, E. L.,
Nitzberg, B., Saphir, W., and Snir, M. (1998). MPI–
The Complete Reference: Volume 2, The MPI-2 Ex-
tensions. MIT Press, Cambridge, MA, USA.
Hasco
¨
et, L. and Pascual, V. (2013). The Tapenade au-
tomatic differentiation tool: Principles, model, and
specification. ACM Trans. Math. Softw., 39(3):20:1–
20:43.
Henning, M. (2008). The rise and fall of CORBA. Commu-
nications of the ACM, 51(8):52–57.
Kenny, J. P., Benson, S. J., Alexeev, Y., Sarich, J.,
Janssen, C. L., Curfman McInnes, L., Krishnan, M.,
Nieplocha, J., Jurrus, E., Fahlstrom, C., and Windus,
T. L. (2004). Component-based integration of chem-
istry and optimization software. Journal of Computa-
tional Chemistry, 25(14):1717–1725.
K
¨
orkel, S. (2002). Numerische Methoden f
¨
ur Optimale
Versuchsplanungsprobleme bei nichtlinearen DAE-
Modellen. PhD thesis, University of Heidelberg, Ger-
many.
Lawrence, C. T. and Tits, A. L. (1996). Nonlinear equality
constraints in feasible sequential quadratic program-
ming. Optimization Methods and Software, 6:265–
282.
Lindstr
¨
om, P. and Wedin, P.-
˚
A. (1999). Gauss-Newton
based algorithms for constrained nonlinear least
squares problems. Department of Computing Science,
Faculty of Science and Technology, Ume
˚
a University,
Sweden.
Munson, T., Sarich, J., Wild, S., Benson, S., and Curfman
McInnes, L. (2012). TAO 2.0 users manual. Technical
Report ANL/MCS–TM–322, Mathematics and Com-
puter Science Division, Argonne National Laboratory.
http://www.mcs.anl.gov/tao.
Nocedal, J. and Wright, S. J. (2006). Numerical Optimiza-
tion. Springer, New York, 2nd edition.
Object Management Group (2012). Common Object Re-
quest Broker Architecture (CORBA): Specification,
Version 3.3. http://www.omg.org/spec/CORBA/3.3.
Oliphant, T. E. (2007). Python for scientific computing.
Computing in Science & Engineering, 9(3):10–20.
OpenMP Architecture Review Board (2013). OpenMP
Application Program Interface, Version 4.0.
http://www.openmp.org.
Pukelsheim, F. (2006). Optimal Design of Experiments.
Number 50 in Classics in Applied Mathematics.
SIAM, Philadelphia.
Rall, L. B. (1981). Automatic Differentiation: Techniques
and Applications, volume 120. Springer Verlag,
Berlin.
Rasch, A. and B
¨
ucker, H. M. (2010). EFCOSS: An interac-
tive environment facilitating optimal experimental de-
sign. ACM Transactions on Mathematical Software,
37(2):13:1–13:37.
Seidler, R., B
¨
ucker, H. M., Padalkina, K., Herty, M.,
Niederau, J., Marquart, G., and Rasch, A. (2014).
Redesigning the EFCOSS framework towards finding
optimally located boreholes in geothermal engineer-
ing. In Horv
´
at, I. and Rus
´
ak, Z., editors, Proceed-
ings of the tenth international symposium on tools and
methods of competetive engineering (TMCE 2014),
May 19–23, 2014, Budapest, Hungary, pages 831–
842.
Snir, M., Otto, S., Huss-Lederman, S., Walker, D., and Don-
garra, J. (1995). MPI–The Complete Reference. MIT
Press, Cambridge, MA, USA.
Snir, M., Otto, S. W., Huss-Lederman, S., Walker, D. W.,
and Dongarra, J. (1998). MPI–The Complete Refer-
ence: Volume 1, The MPI Core. MIT Press, Cam-
bridge, MA, USA, 2nd edition.
The Scipy Community (2013). SciPy v0.13.0 reference
guide.
Wedin, P.-
˚
A. and Lindstr
¨
om, P. (1988). Methods and soft-
ware for nonlinear least squares problems. Technical
Report UMINF–133.87, Inst. of Information Process-
ing, University of Ume
˚
a, Ume
˚
a, Sweden.
ICSOFT-EA2014-9thInternationalConferenceonSoftwareEngineeringandApplications
454
