
Agent-based Simulations of Patterns for Self-adaptive Systems
Mariachiara Puviani
1
, Giacomo Cabri
2
and Franco Zambonelli
3
1
DIEF, Universit
`
a di Modena e Reggio Emilia, Via Vignolese 905/b, Modena, Italy
2
FIM, Universit
`
a di Modena e Reggio Emilia, Via Campi 213/b, Modena, Italy
3
DISMI, Universit
`
a di Modena e Reggio Emilia, Via Amendola 2, Reggio Emilia, Italy
Keywords:
Adaptation Pattern, Taxonomy, MAS.
Abstract:
Self-adaptive systems are distributed computing systems composed of different components that can adapt
their behavior to different kinds of conditions. This adaptation does not concern the single components only,
but the entire system. In a previous work we have identified several patterns for self-adaptation, classifying
them by means of a taxonomy, which aims at being a support for developers of self-adaptive systems. Start-
ing from that theoretical work, we have simulated the described self-adaptation patterns, in order to better
understand the concrete and real features of each pattern. The contribution of this paper is to report about the
simulation work, detailing how it was carried out, and to present a “table of applicability” that completes the
initial taxonomy of patterns and provides a further support for the developers.
1 INTRODUCTION
A complex distributed self-adaptive system consists
of multiple components that are deployed on multi-
ple nodes connected via some network (Weyns et al.,
2013), whose administration must be automated, to
avoid human manual management that would intro-
duce cost, duration, slowness, and error-proneness.
Self-adaptive systems can also optimize their perfor-
mance under changing operating conditions.
In order to build self-adaptive systems, develop-
ers can choose a specific adaptation pattern among
available ones. In a previous work we have cata-
loged them (Puviani, 2012b), and such a catalogue
turns out to be useful, because a pattern describes a
generic solution for a recurring design problem and
the application of these adaptation patterns helps to
develop a system that exhibits specific adaptation fea-
tures and that is able to self-adapt during all its life.
Often the same problem can be solved with differ-
ent approaches, which means that different adaptation
patterns can be used.
Starting from the catalogue of adaptation patterns,
we wrote a taxonomy table (Puviani et al., 2013) that
will help developer to choose the most suitable pattern
for their systems. Moreover, to better understand (and
take advantages from) the specific features of each
adaptation pattern and its applicability, we have simu-
lated the behaviour of different patterns. The simula-
tions allow us to define a “table of applicability” that
will complete the initial taxonomy of patterns.
In simulating self-adaptive systems we take ad-
vantages of agents. Software agents represent an
interesting paradigm to develop intelligent and dis-
tributed systems, because of their autonomy, proac-
tiveness and reactivity. In addition to that, their so-
ciality enables the distribution of the application logic
in different agents that can interact with each other
and with the host environment. In our work we use
Multi Agent Systems (Ferber, 1999) in order to sim-
ulate complex self-adaptive systems. This is because,
as said before, agents exhibit features very relevant
for self-adaptation.
Moreover, the chosen mechanism used to im-
plement adaptation patterns is the “role based ap-
proach” (Cabri and Capodieci, 2013). Roles are a set
of behaviours common to different entities, that can
be applied to the context in which a component is be-
having. An adaptive pattern can be described in terms
of the roles the different components play. This will
allow us to apply different roles to agents, in order to
simulate different adaptation patterns.
The remainder of this paper is organized as fol-
lows. Section 2 discusses related work in the area. In
Section 3 we present the taxonomy of adaptation pat-
terns and show some examples; while in Section 4 we
present the “role based approach” and how agents are
used o develop patterns. Section 5 presents a case
190
Puviani M., Cabri G. and Zambonelli F..
Agent-based Simulations of Patterns for Self-adaptive Systems.
DOI: 10.5220/0004925001900200
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 190-200
ISBN: 978-989-758-015-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

study and simulations implemented using RoleSys-
tem. Section 6 shows how these simulations help us
to enrich the initial taxonomy and validate the use of
adaptation patterns in developing self-adaptive sys-
tems. Section 6 discusses the results of the work and
concludes the paper.
2 RELATED WORK
The interest in engineering complex distributed self-
adaptive systems is growing more and more in the
last years, as shown by the number of surveys and
overviews on the topic (Cheng et al., 2009; Salehie
and Tahvildari, 2009; Weyns et al., 2012a). How-
ever, a comprehensive and rationally-organized anal-
ysis of architectural patterns for self-adaptation, and
their use, is still missing, despite the potential advan-
tages of such a contribution.
Going into details, some works are very relevant
considering patterns for adaptive systems. For exam-
ple, Gomaa et al. (Gomaa and Hashimoto, 2012) in-
troduce the concept of “software adaptation patterns”
and specifies how they can be used in software adapta-
tion of service-oriented architectures. However, they
do not give a complete overview of their use.
Grounded on earlier works on architectural self-
adaptation approaches, the FORMS model (FOrmal
Reference Model for Self-adaptation) (Weyns et al.,
2012b) enables engineers to describe, study and eval-
uate alternative design choices for self-adaptive sys-
tems. FORMS defines a shared vocabulary of adap-
tive primitives that – while simple and concise – can
be used to precisely define arbitrary complex self-
adaptive systems, and can support engineers in ex-
pressing their design choices, there included those re-
lated to the architectural patterns for feedback loops.
Closest to our approach, Weyns et al. (Weyns et al.,
2012c) introduce the concept of patterns for self-
adaptive systems based on control loops. The authors
describe how control loops are able to enforce adap-
tivity in a system, and present a set of patterns, but it
is not clear how to chose between them.
In summary, the analysis of the related work in
the area shows that literature on adaptive systems is
very rich: patterns are a good mechanism that can be
adopted to promote and support self-adaptation, but
are not too much investigated, especially there is not a
clear idea on how to help developers to choose among
patterns for their systems. After our taxonomy pro-
posed in (Puviani et al., 2013), experiments that sup-
port the use of patterns to build self-adaptive systems
are still missing, and that is why we proceed with our
work. From our knowledge, there is no work that uses
agents to simulate self-adaptive systems, exception of
the use of AMAS proposed for example by (Bonabeau
et al., 1999) and (Georg
´
e et al., 2009).
3 USE OF PATTERNS
Because patterns are able to describe generic solu-
tions for a recurring design problem, their use to de-
sign self-adaptive systems is very relevant. Moreover,
a very important task to develop a well performing
self-adaptive system, is to understand which pattern
to choose. Defining how a pattern works in a self-
adaptive system and which kind of systems is covered
by a specific pattern, we created a preliminary taxon-
omy presented in Figure 1 (Puviani et al., 2013).
This table describes the different patterns arranged
in different levels:
• the single components level – first row;
• the ensemble level where the environment is con-
sidered as the means of adaptation (e.g. a bio-
inspired system) – second row;
• the ensemble level where adaptation is delegated
to an external agent called Autonomic Manager
(AM) that manages all the other agents (e.g. cen-
tralised system with regard to the adaptation as-
pects) – third row;
• the ensemble level where adaptation is delegated
to the agents themselves though their direct com-
munication of adaptation mechanisms – fourth
row.
How these patterns are useful to build self-
adaptive systems has been demonstrated in different
works like (Puviani, 2012a), (Puviani et al., 2012a),
(Puviani et al., 2012b) and (Mayer et al., 2013).
With the aid of this taxonomy table and the cata-
logue of pattern presented in (Puviani, 2012b), we are
able to understand which pattern can describe the de-
sired features of a system. For example, the table tells
us that to build a system where it is important that the
mechanisms for adaptation are shared between all the
components, one of the patterns of the fourth row can
be used.
However, to better understand the functionality of
adaptation patterns, we aim at deeper analysing, with
the aid of simulations, the use of adaptation patterns.
So, we started analysing the “basic” pattern of each
ensemble level (the single level is delegated to the in-
ternal of each agent)
1
.
1
For space reasons we report only the studies on the first
column of patterns in the taxonomy table
Agent-basedSimulationsofPatternsforSelf-adaptiveSystems
191
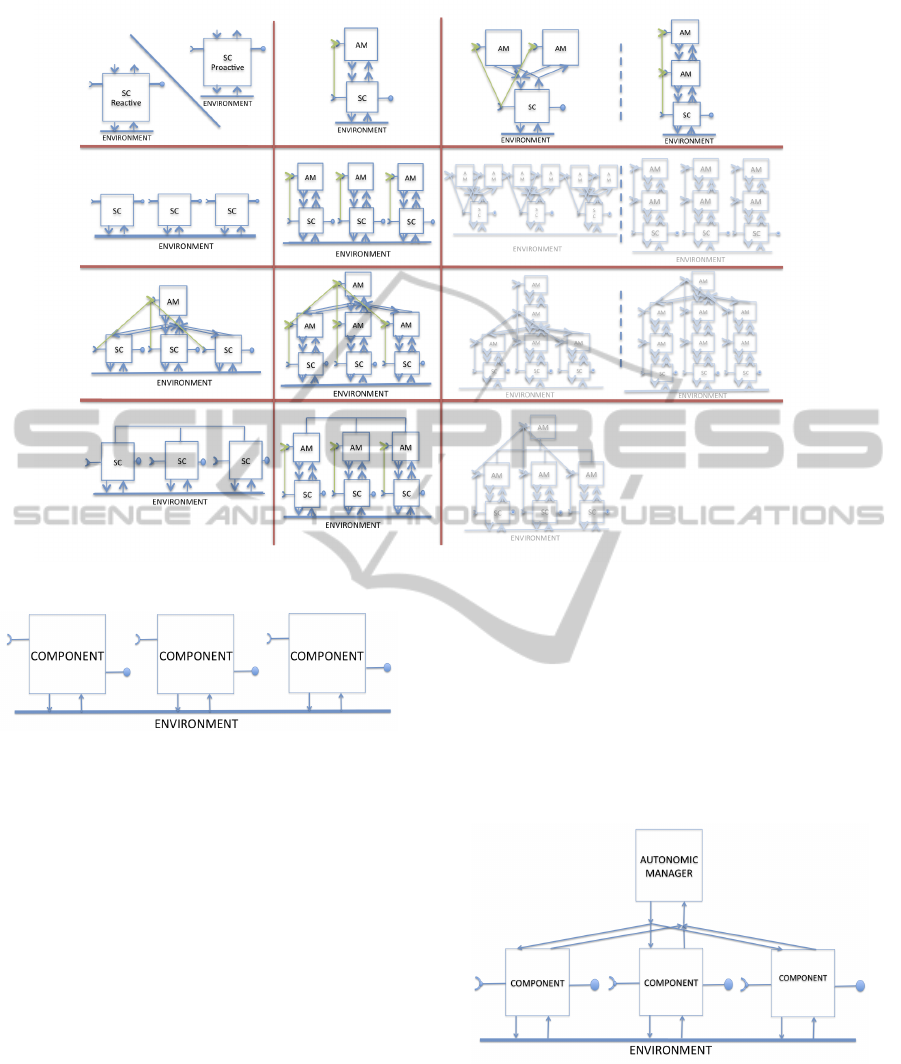
Figure 1: Taxonomy of self-adaptation patterns based on different composition mechanisms.
Figure 2: Reactive Stigmergy SCE Pattern.
First of all we present in the next subsections the
studied patterns. For space limitations in the follow-
ing we only report the “context” of the system that
will apply that pattern, and its main “behaviour”.
3.1 Reactive Stigmergy Service
Components Ensemble Pattern
Context. This patterns has to be adopted when:
1. there are a large amount of components acting to-
gether;
2. the components need to be simple component,
without having a lot of knowledge in their inter-
nal;
3. the environment is frequently changing;
4. the components are not able to directly communi-
cate one with the other.
Behaviour. This pattern has not a direct feedback
loop. Each single component acts like a bio-inspired
component (e.g. an ant). To satisfy its simple goal, the
component acts in the environment that senses with
its “sensors” and reacts to the changes in it with its
“effectors”. The different components are not able
to communicate one with the other, but are able to
propagate information (their actions) in the environ-
ment. Than they are able to sense the environment
changes (other components reactions) and adapt their
behaviour due to these changes.
Figure 3: Centralised AM SCE Pattern.
3.2 Centralised AM Service
Components Ensemble Pattern
Context. This patterns has to be adopted when:
1. the components are simple and an AM is neces-
sary to manage adaptation;
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
192
2. a direct communication between components is
necessary;
3. a centralised feedback loop is more suitable be-
cause a single AM has a global vision on the sys-
tem;
4. there are few components composing the ensem-
ble.
Behaviour. This pattern is designed around an unique
feedback loop. All the components are managed by
a unique AM that “controls” all the components be-
haviour and, sharing knowledge about all the compo-
nents, is able to propagate adaptation.
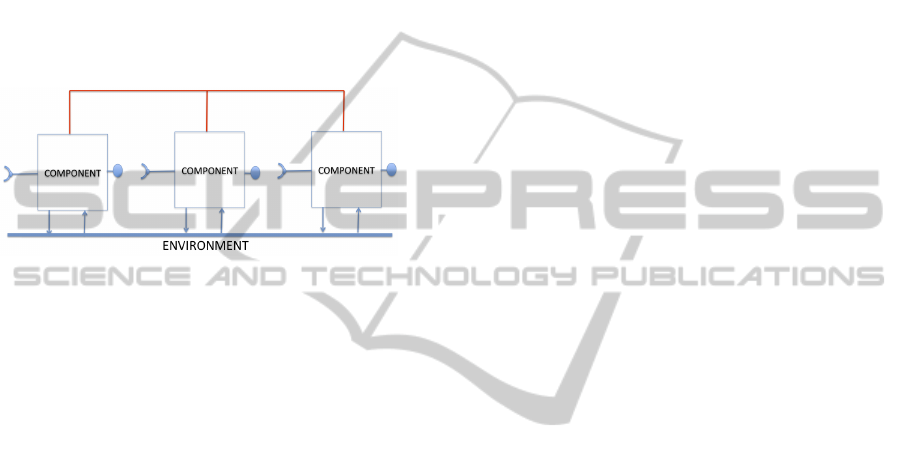
Figure 4: P2P Negotiation SCE Pattern.
3.3 P2P Negotiation Service
Components Ensemble Pattern
Context. This patterns has to be adopted when:
1. the components are proactive;
2. the components need to directly communicate one
with the other to propagate adaptation.
Behaviour. Each component is managed by an inter-
nal and implicit AM. The components directly com-
municate one with the other with a P2P communica-
tion protocol.
4 AGENTS AND THE ROLE
BASED APPROACH
To evaluate patterns, we have implemented them us-
ing roles.
The “role theory” (Biddle, 1979) has been applied
to several computer science fields. For this reason
there are several definitions of the concept of role,
depending on the considered scenario. The interest-
ing feature of roles is that they can be used as a
paradigm to smartly model the view of a complex sys-
tem (Fowler, 1997). As the author said, role is defined
as “a set of behaviours common to different entities,
with the possibility to apply them to an entity in order
to change its capabilities and behaviour”.
Roles are very important not only because can be
applied to existing entities to change their behaviour,
but also because they can be reused in different situa-
tions. For this reason they are considered as solutions
common to different problems, as the same way pat-
terns are considered as solutions common to different
systems. Roles can also be used to manage interac-
tions between components. These interactions are not
a priori defined between components, but only occur
when the roles involved in the interaction are associ-
ated to components. It is important to note that roles
are tied to the local execution environment, thus they
represent context-dependent views of entities running
in that environment (B
¨
aumer et al., 1998), granting
adaptability. Moreover roles grant portability and
generality: since they are tied to each interaction con-
text, they hide context details to components, which
are free to discard those “low-level” details. For all
these reasons role are deserving to build adaptation
patterns.
In order to play a role, a component must assume
it. In other words, a component must choose a specific
role, that means that the role assumption is consid-
ered an active process of the components adaptation.
In complex system, using the agent paradigm, we as-
sume that a role is a software component (e.g. a Java
class) that can be added to each service component
of the ensemble. In our approach, a role is modeled
as a set of capabilities and an expected behavior, both
related to the component (i.e. agent) that plays such
role.
Based on the concept of role, we exploit RoleSys-
tem (Cabri et al., 2003). RoleSystem is an interaction
infrastructure completely written in Java. This will
grant high portability and the capability to be associ-
ated with the main agent platforms. The agent plat-
form we chose to exploit RoleSystem is Jade (Bel-
lifemine et al., 2002), a FIPA compliant agent plat-
form.
The RoleSystem infrastructure is divided into two
parts, as shown in Figure 5: the upper one is inde-
pendent of the agent platform, while the lower part is
bound to the chosen agent platform (i.e. Jade).
As said before, agents are a key point of RoleSys-
tem. In applications exploiting the RoleSystem in-
frastructure, an agent is composed of two layers: the
subject layer, representing the subject of the role –
independent of the platform; and the wrapper layer,
which is the Jade agent in charge of supporting the
subject layer.
A specific agent, called Server Agent, is in charge
of managing the roles and their interactions for each
context/environment. It interacts with the wrapper
layer of agents by exchanging ACL messages format-
ted in an appropriate way.
Agent-basedSimulationsofPatternsforSelf-adaptiveSystems
193
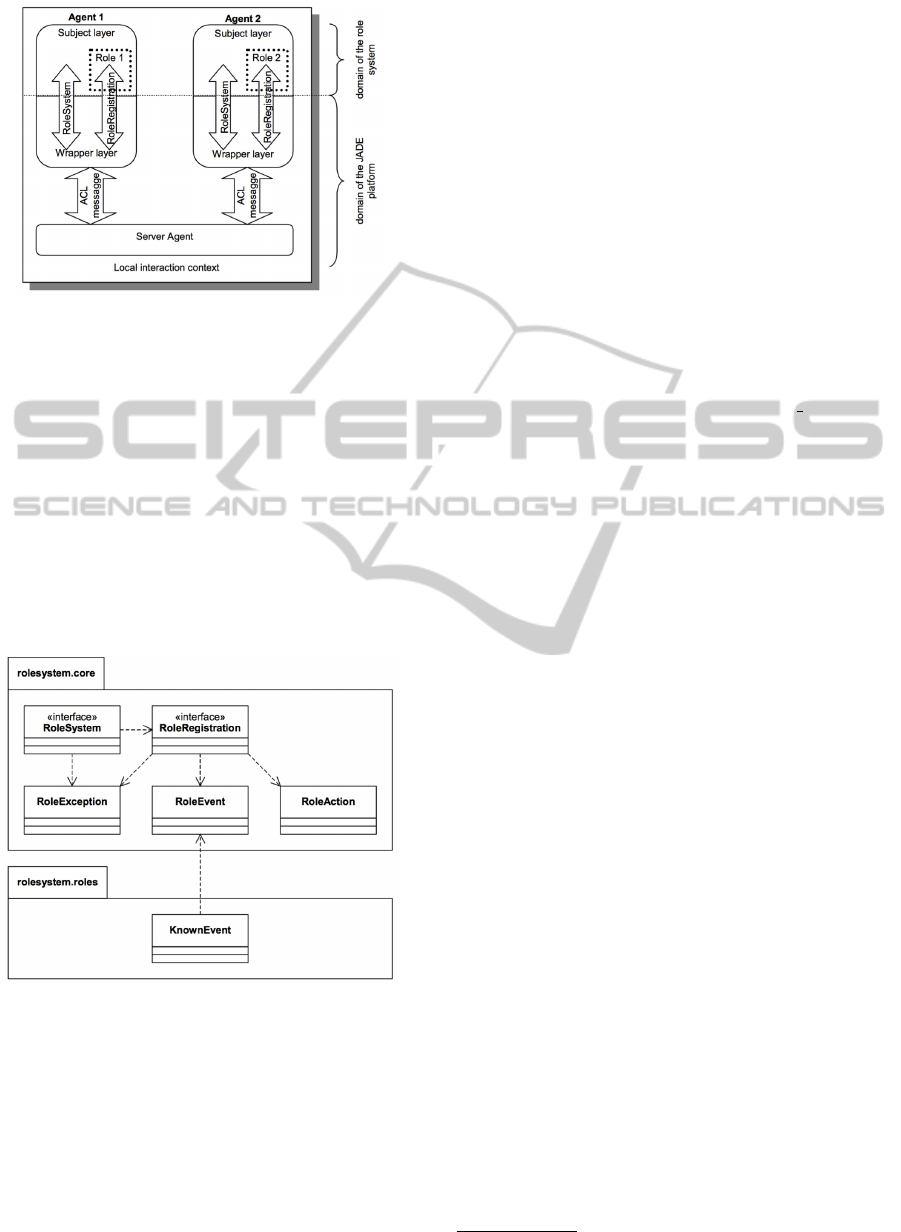
Figure 5: RoleSystem: separation of domain.
Every agent is a subject that perform some actions
and on which some event can happened. So a “role”
is defined as a set of actions that an agent assuming
that role can play, and a set of events that an agent
assuming that role can recognize. Based on this idea,
every agent can choose the role on its temporary and
immediate necessities.
We do not start from scratch, but starting from
the existing RoleSystem, we developed several Java
classes, both platform-independent and related to
Jade. The main platform-independent classes, that are
in the rolesystem.core and rolesystem.roles packages,
are reported in the UML diagram of Figure 6.
Figure 6: RoleSystem packages.
The connection between the subject layer and
the wrapper layer is granted by two Java objects,
instances of classes implementing respectively the
RoleSystem and RoleRegistration interfaces, which
provide methods to register agents with roles, to
search for agents playing a given role, to listen for
events and to perform actions. The RoleSystem inter-
face enables agents to perform preliminary operations
needed to assume a specific role; while the RoleRegis-
tration interface enables agents to perform operations
on the system via a specific registration (i.e., after that
the agent has assumed a role).
To play a role, an agent has to obtain an object that
implements the RoleRegistration interface, invoking
the reqRegistration method. The returned object rep-
resents the association between the agent and the spe-
cific role. As soon as an agent does not need to play
the assumed role, it can release the role registration
via the dismiss method. If the agent wants to assume
a role again (one just assumed or another one), it has
to require another registration via the reqRegistration
method.
A role is implemented by an abstract class, where
the features of the role are expressed by static fields
and static methods. The class that implements a role
has the same name of the role, and it is part of a pack-
age that represents the application scenario for such
role. A static and final field called ROLE ID identi-
fies the role. Each action defined in a role is built by a
static method, which is in charge of creating an appro-
priate instance of the class RoleAction and returning
it to the caller. Such a static method has the same
name of the corresponding action and one or two pa-
rameters: the former one is the agent addressee of the
event corresponding to the action; the latter param-
eter (optional) is the information content to perform
that action.
To perform an action, an agent playing a given
role must obtain the appropriate RoleAction instance,
invoking the corresponding static method of the role
class. Then, it has to invoke the doAction method of
RoleRegistration to actually perform the action, sup-
plying the previously created instance of RoleAction.
Then, when the server agent receives the request to
perform the action via the wrapper layer, translates
it into a known event, and sends it to the addressee
agent. To find partners to interact with, an agent ex-
ploits the searchForRoleAgent methods made avail-
able by the RoleSystem interface, by which the agent
can get a list of the registrations related to a specific
role, each one specified by an identifier.
Starting from RoleSystem we have implemented
a scenario of swarm robotics. There we develop ded-
icated Java classes representing the used roles (see
Section 5).
5 CASE STUDY
Since this work has been carried on in the frame-
work of the ASCENS project
2
, we use one of the case
study presented in the project to develop RoleSystem
2
http://ascens-ist.eu
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
194
classes and to implement different simulations.
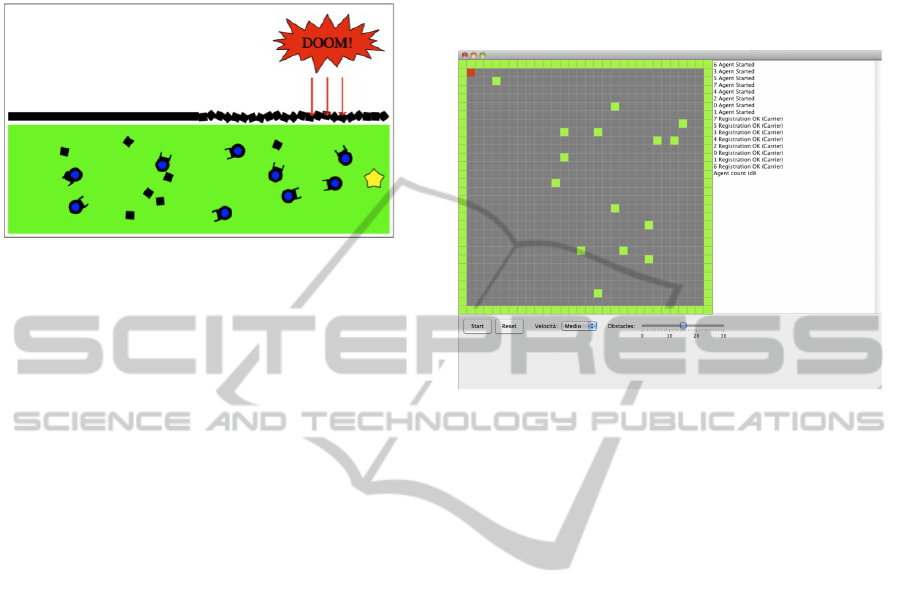
In particular, we consider a swarm robotics sce-
nario: the disaster recovery scenario (Figure 7).
Figure 7: Disaster recovery scenario - ASCENS case study.
As reported in (Serbedzija et al., 2012), in the dis-
aster recovery case study, we imagine that a disas-
ter happened, such as the catastrophic failure of a nu-
clear plant, or a major fire in a large building. We also
imagine that an activity of search and rescue must be
carried out. For instance, people may be trapped in-
side a building and they must be found and brought to
safety. Given the high danger of operating in such en-
vironment, it is realistic to think that an ensemble of
robots could be used to perform the most dangerous
activities. Among these activities, four are very rele-
vant: exploring the environment, mapping dangerous
areas and targets to rescue, performing the rescue, and
seal the dangerous areas. In particular, we analyse the
environment exploration task, to understand how dif-
ferent patterns behave in order to build such a system.
5.1 Environment Exploration
Implementation
In this scenario, an ensemble of robots (simulated by
agents) has the task to explore the environment in or-
der to map it. The ensemble is composed of a given
number of autonomous robots that are initially ran-
domly distributed in a room (e.g. each position is ran-
domly chosen once a robot is entered in the room).
The goal of the ensemble is strictly connected to the
utility of minimizing the time of completion of the
task. Another important utility of the system is to
provide an equal work balancing for all the compo-
nents that form the ensemble. A single robot does not
know in advance the number of components of the
ensemble. At the same way, the robot does not know
anything on the shape and the size of the environment.
To implement the simulations of this scenario we
have defined a room of the size of 30x30 cells, with
15 obstacles in, randomly distributed. The obstacles
can be walls or something else (e.g. ruins from an
explosion), that cannot be removed by a robot. Due
to the size of the room we initially implemented 16
robots moving in (they are a right amount compared
to the size of the room, in order to be a swarm). In
Figure 8 we can see a screenshot of the environment.
Figure 8: Environment of the “environment exploration sce-
nario”.
In order to implement each pattern, we wrote one
or more specific role with RoleSystem, which robots
must play during their life.
The first pattern we used to implement the sys-
tem was the “Reactive Stigmergy” pattern. This is
because the system’s requirements are well described
in the context of this pattern, and because usually, in
swarm robotics, the stigmergic mechanism is the one
that best fits for adaptation.
For this pattern, we implemented the “Explorer”
role. With this role a robot starts to explore the cells in
its surrounding, following an anti-clockwise random
movement. Using the moveRandom(RoleRegistration
registration) method described in the following, a
robot leaves a pheromone every time it explores a new
cell, and when it senses this pheromone, left by other
robots in a cell, it is able to understand that this cell
has been explored by others. The simulation ends
when every robot does not find any free cell unex-
plored (by itself) in a range of 10 cells. An example
of code of the “Explorer” role is reported in Figure 9.
We performed hundreds of simulations using this
pattern and in Figure 10 we show the average time of
the goal’s satisfaction (A), using 16 robots, and the
standard deviation. As we can see, the average time
is about 418000 millisec. In these simulations every
robot colors the pavement of the room (while it leaves
the pheromone) of a different colour. However, at the
end of these simulations, only few colors appear on
the screen. This is because it happens that most of
the time a robot explores again a cell just explored by
Agent-basedSimulationsofPatternsforSelf-adaptiveSystems
195
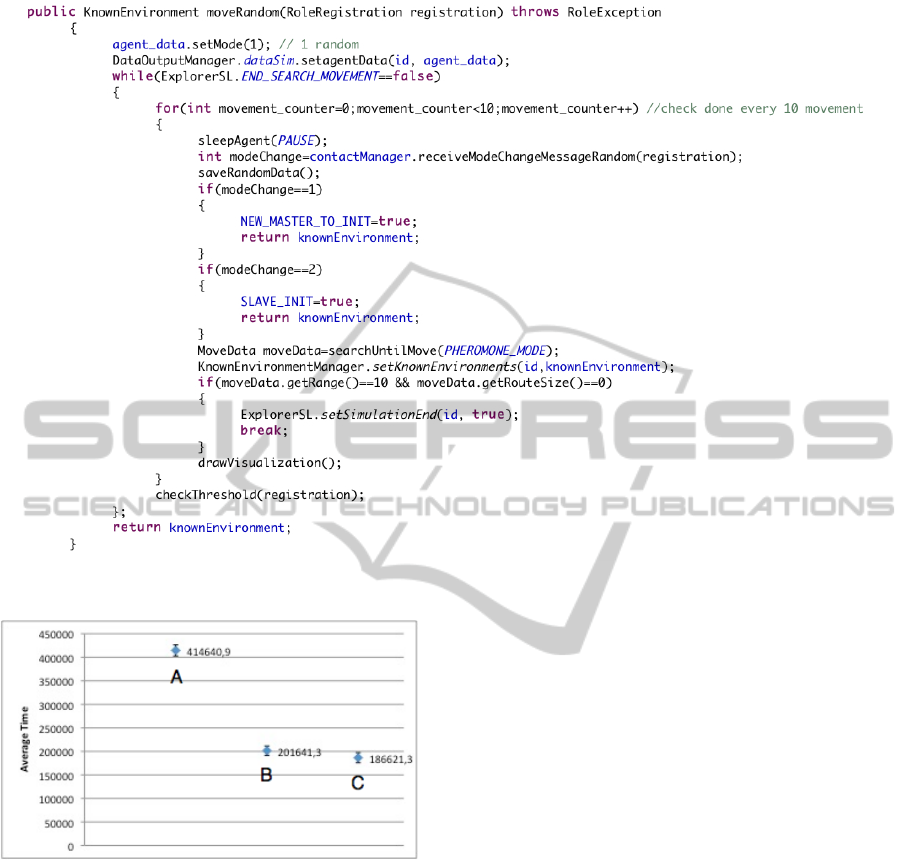
Figure 9: Code of the “Explorer” role.
Figure 10: Cross-section of 10 simulations that uses the Re-
active Stigmergy pattern.
another robot. This is a drawback of patterns based
on stigmergy.
To overcome this, we implemented the same sys-
tem using also the the “Centralised AM” pattern and
the “P2P” pattern.
For the “Centralised AM” pattern we imple-
mented the “Manager” and the “Slave” roles. An ex-
ample of code of the “Manager” role is reported in
Figure 11.
The manager, communicating with all the robots,
receives the information about their positions and the
explored area. Then it merges all the received infor-
mation to create a map of the explored area and it
shares this map with the other robots that are able to
understand the perimeter of the known area in order
to explore the exterior of that area.
An example of the code of the “Slave” role is re-
ported in Figure 12.
With this method the robot-slave is able to update
its knowledge with the data of all the other robots,
by updating its myKnownSquares variable with data
given by the manager.
The exploration ends if the built map find a closed
perimeter explored (the perimeter is outlined by ob-
stacles in closed cells) or if all the robots do not find
unexplored areas in the surrounding of a radius of 10
cells.
As we can see from Figure 10, adopting this pat-
tern the average time of the goal’s satisfaction (B) is
better than the same system developed using the “Re-
active Stigmergy” pattern; nevertheless, it remains
high (it was compared with expected results studied
in previous works). This is due to the need for co-
ordinating a large number of robots in an unknown
environment. The fact of not knowing the environ-
ment makes it very difficult to well coordinate the
robots, because the manager knows the other robots’
positions and the explored area, but it does not know
which area still misses to be explored.
Moreover, if the AM fails (example not reported in
this simulation), it has to be replaced by negotiation.
Here, the simplest and less time consuming strategy
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
196
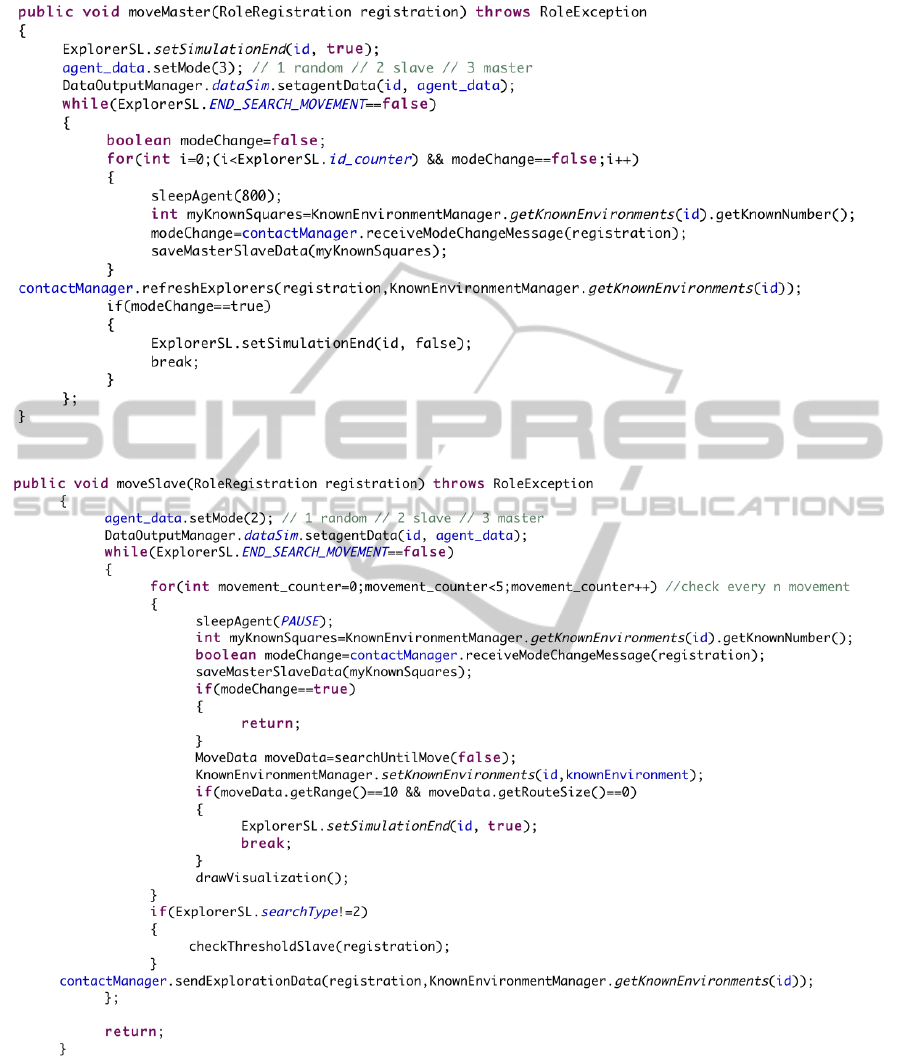
Figure 11: Example of the “Manager” role.
Figure 12: Example of the “Slave” role.
for negotiation is that the first robot that senses the
AM is out of work, become the new AM. This so-
lution is also the most dangerous one because more
than one robot may become AM. Other solutions uses
negotiation algorithms.
Instead, the “P2P” pattern does not suffer from the
limitation of having a single point of failure. Further-
more, more than the “Reactive Stigmergy” pattern, in
this pattern the adaptation mechanism is shared be-
tween components. In the “P2P” pattern we devel-
oped the “Negotiator” role that permits a component
to share its knowledge with neighbours in a range of
Agent-basedSimulationsofPatternsforSelf-adaptiveSystems
197
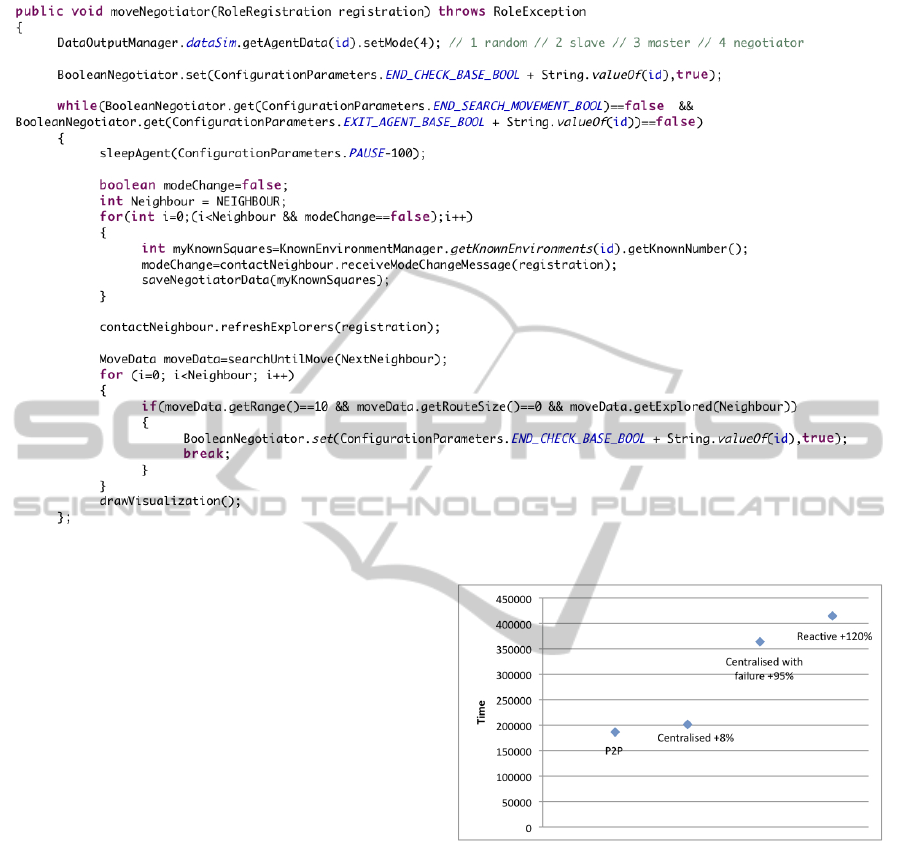
Figure 13: Example of the “Negotiator” role.
10 cells and to negotiate with them which cell has to
be explored next.
An example of the code of the “Negotiator” role
is reported in Figure 13.
With this role the time necessary to exchange
adaptation messages between neighbours does not in-
validate the ultimate satisfaction of the goal: compo-
nents are able to coordinate themselves in little groups
and if some of them expire, the adaptation of the
whole system goes on, as the Negotiator role allows it.
Figure 10 shows the average time (C) in simulations
that use this pattern.
In Figure 14 we represent the comparison of the
use of the different patterns in term of time of goal
satisfaction. We can see that the “P2P” pattern has
on average the best performances related to the use of
the “Centralised AM” pattern without and with failure
of the AM, and related to the “Reactive Stigmergy”
pattern where the time is 120% more that the “P2P”
one.
6 CONCLUSIONS
As emerged from the simulations, where all patterns
end satisfying the goal, all the developed patterns
make it possible to have a self-adaptive system. How-
ever, in different conditions (due to the environment
or to other components of the system) simulations
Figure 14: Comparison of the average time of goal satisfac-
tion.
show that some perform better than others.
This implementation of different patterns on the
same case study, gives us the possibility to add impor-
tant specification to the initial taxonomy. The analysis
of the different simulations reported above, permits us
to write a “table of applicability” that describes pat-
terns and their performances (see Figure 15). As said
before, due to space limitations, in this paper we re-
ported simulations and analysis only of the basic pat-
terns, one for each level of adaptation – first column of
the taxonomy table (see (Puviani, 2012b)). Moreover,
we need to recall that, for each pattern, the addition of
an external manager over a component (that can be a
component or another AM) will add a level of auto-
nomicity but the way adaptation is propagated inside
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
198
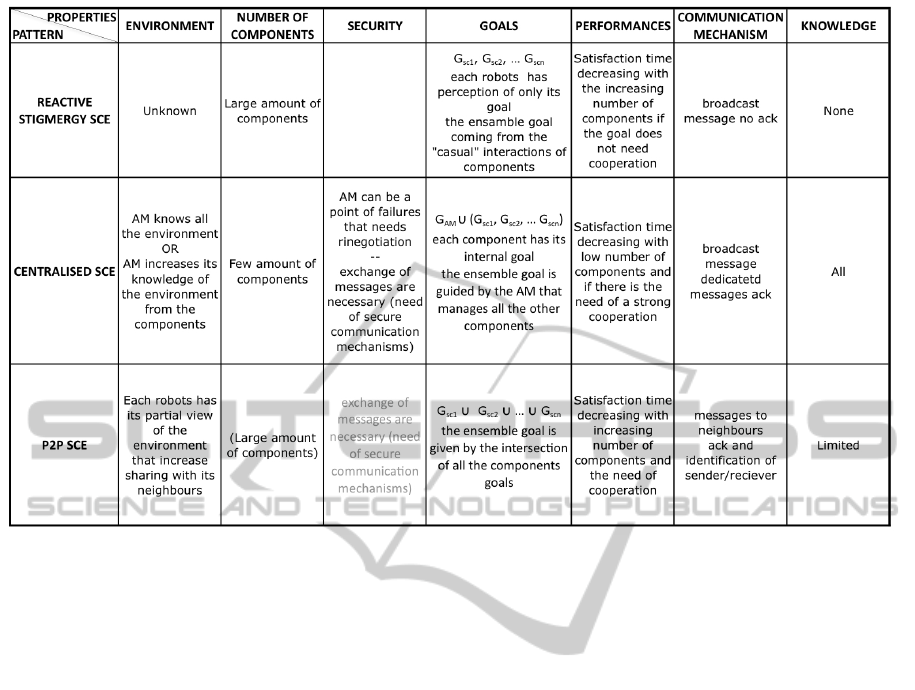
Figure 15: “Table of applicability” of patterns.
the pattern remains the same for all the patterns of a
specific level (same row). We aim at extending the
simulations to other patterns in order to complete the
“table of applicability”.
In the table we can see which pattern better cre-
ates a self-adaptive system under certain conditions,
and which features a pattern shows. For example, if
we would like to develop a system where the environ-
ment is perfectly known from at least one component,
the “Centralised AM” pattern will perform better than
the “Reactive Stigmergy” SCE pattern. Otherwise, if
in our system we have no mechanisms for a direct
communication for adaptation between components,
the “Reactive Stigmergy” SCE pattern has to be pre-
ferred.
Agents enabled us to simulate patterns for com-
plex self-adaptive systems, and with the aid of adap-
tation patterns, users are able to develop the most
performative self-adaptive system, based on different
system conditions.
On this way future work can concern implement-
ing simulations in different scenarios that will confirm
and complete our “table of applicability”.
ACKNOWLEDGEMENTS
Work supported by the ASCENS project EU FP7-
FET, Contract No. 257414.
REFERENCES
B
¨
aumer, D., Riehle, D., Siberski, W., and Wulf, M. (1998).
The role object pattern. In Washington University
Dept. of Computer Science. Citeseer.
Bellifemine, F., Caire, G., Trucco, T., and Rimassa, G.
(2002). Jade programmers guide. Jade version, 3.
Biddle, B. (1979). Role theory: Concepts and research.
Krieger Pub Co.
Bonabeau, E., Dorigo, M., and Theraulaz, G. (1999).
Swarm intelligence: from natural to artificial systems.
Oxford University Press, USA.
Cabri, G. and Capodieci, N. (2013). Runtime Change of
Collaboration Patterns in Autonomic Systems: Mo-
tivations and Perspectives. In Proceedings of the
Ninth International Symposium on Frontiers of In-
formation Systems and Network Applications (FINA),
Barcelona, Spain, March 2013.
Cabri, G., Leonardi, L., and Zambonelli, F. (2003). Imple-
menting Role-based Interactions for Internet Agents.
In The 2003 International Symposium on Applica-
tions and the Internet (SAINT), Best Paper Award Or-
lando,Florida,USA, January 2003.
Agent-basedSimulationsofPatternsforSelf-adaptiveSystems
199

Cheng, B., de Lemos, R., Giese, H., Inverardi, P., Magee,
J., Andersson, J., Becker, B., Bencomo, N., Brun, Y.,
Cukic, B., et al. (2009). Software engineering for self-
adaptive systems: A research roadmap. In Cheng,
B., Lemos, R. d., Inverardi, P., and Magee, J., edi-
tors, Software Engineering for Self-Adaptive Systems,
volume 5525 of Lecture Notes in Computer Science,
pages 1–26. Springer.
Ferber, J. (1999). Multi-agent systems: an introduction to
distributed artificial intelligence, volume 1. Addison-
Wesley Reading.
Fowler, M. (1997). Dealing with roles. In Proceedings of
PLoP, volume 97, Monticello, Illinois, USA.
Georg
´
e, J.-P., Peyruqueou, S., R
´
egis, C., and Glize, P.
(2009). Experiencing self-adaptive mas for real-time
decision support systems. In Demazeau, Y., Pav
´
on,
J., Corchado, J., and Bajo, J., editors, 7th Interna-
tional Conference on Practical Applications of Agents
and Multi-Agent Systems (PAAMS 2009), volume 55
of Advances in Intelligent and Soft Computing, pages
302–309. Springer Berlin Heidelberg.
Gomaa, H. and Hashimoto, K. (2012). Dynamic self-
adaptation for distributed service-oriented transac-
tions. In Proceedings of the 2012 International Work-
shop on Software Engineering for Adaptive and Self-
Managing Systems, pages 11–20, Zrich, Switzerland.
IEEE Computer Society.
Mayer, P., Klarl, A., Hennicker, R., Puviani, M., Tiezzi, F.,
Pugliese, R., Keznikl, J., and Bure
ˇ
s, T. (2013). The
Autonomic Cloud: A Vision of Voluntary, Peer-2-Peer
Cloud Computing. In Proceedings of 3rd Workshop
on Challenges for Achieving Self-Awareness in Auto-
nomic Systems, pages 1–6, Philadelphia, USA.
Puviani, M. (2012a). Adaptive System’s Configuration in
a Swarm Robotics Scenario. Awareness magazine,
page 3.
Puviani, M. (2012b). Tr 4.2: Catalogue of architec-
tural adaptation patterns. Technical report, ASCENS
Project.
Puviani, M., Cabri, G., and Frei, R. (2012a). Self-healing
in Ensembles’ Adaptive Collaborative Patterns. In 1st
International Conference on Through-life Engineer-
ing Services (TESConf 2012), page 361367, Shriven-
ham, UK.
Puviani, M., Cabri, G., and Leonardi, L. (2012b). Adaptive
Patterns for Intelligent Distributed Systems: a Swarm
Robotics Case Study. In Proceedings of the 6th Inter-
national Symposium on Intelligent Distributed Com-
puting - IDC 2012, pages 241 – 246. Sringer.
Puviani, M., Cabri, G., and Zambonelli, F. (2013). A Tax-
onomy of Architectural Patterns for Self-adaptive Sys-
tems. In Sixth International C* Conference on Com-
puter Science & Software Engineering, pages 77–85,
Porto (P). ACM.
Salehie, M. and Tahvildari, L. (2009). Self-adaptive soft-
ware: Landscape and research challenges. ACM
Transactions on Autonomous and Adaptive Systems
(TAAS), 4(2):14.
Serbedzija, N., Massink, M., Brambilla, M., Latella, D.,
Dorigo, M., and Birattari, M. (2012). Ensemble model
syntheses with robot, cloud computing and e-mobility.
ASCENS Deliverable D, 7.
Weyns, D., Iftikhar, M., Malek, S., and Andersson, J.
(2012a). Claims and supporting evidence for self-
adaptive systems: A literature study. In Software
Engineering for Adaptive and Self-Managing Systems
(SEAMS), 2012 ICSE Workshop on, pages 89 –98.
Weyns, D., Malek, S., and Andersson, J. (2012b). Forms:
Unifying reference model for formal specification of
distributed self-adaptive systems. ACM Transactions
on Autonomous and Adaptive Systems, 7(1):8.
Weyns, D., Schmerl, B., Grassi, V., Malek, S., Mirandola,
R., Prehofer, C., Wuttke, J., Andersson, J., Giese, H.,
and G
¨
oschka, K. (2012c). On patterns for decentral-
ized control in self-adaptive systems. Software Engi-
neering for Self-Adaptive Systems II, pages 76–107.
Weyns, D., Schmerl, B., Grassi, V., Malek, S., Mirandola,
R., Prehofer, C., Wuttke, J., Andersson, J., Giese, H.,
and G
¨
oschka, K. M. (2013). On patterns for decen-
tralized control in self-adaptive systems. In Software
Engineering for Self-Adaptive Systems II, pages 76–
107. Springer.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
200
