
An Improved Parallel Algorithm Using GPU
for Siting Observers on Terrain
Guilherme C. Pena
1
, Marcus V. A. Andrade
1
, Salles V. G. Magalh˜aes
1
,
W. R. Franklin
2
and Chaulio R. Ferreira
1
1
Departamento de Inform´atica, Universidade Federal de Vic¸osa (UFV), Vic¸osa, MG, Brazil
2
Electrical, Computer, and Systems Engineering Dept., Rensselaer Polytechnic Institute (RPI), Troy, N.Y., U.S.A.
Keywords:
Siting, Terrain Visibility, Viewshed, GPU Parallel Algorithm.
Abstract:
This paper presents an efficient method to determine a set of observers (that is, where to site them) such
that a given percentage of a terrain is visually covered. Our method extends the method proposed in (Franklin,
2002) including a local search heuristic efficiently implemented using dynamic programming and GPU parallel
programming. This local search strategy allows to achieve a higher coverage using the same number of
observers as the original method and thus it is possible to obtain a given coverage using a smaller number of
observers. It can be an important improvement since an observer can represent an expensive facility such as a
telecommunication tower. The proposed method performance was compared with that of other methods and
the tests showed that it can be more than 1200 times faster than the sequential implementation (with no use
of dynamic programming and no GPU parallel programmming) and, also, more than 20 times faster than a
previous parallel method presented in (Magalh˜aes et al., 2011).
1 INTRODUCTION
A large amount of high-resolution geographic data
has become available because of the recent ad-
vances in remote sensing. Thus, the development
of advanced techniques to process these data has
been required by Geographic Information Science
(GIS) (Laurini and Thompson, 1992). The Earth sur-
face elevation (terrain) data are usually represented
approximately by a digital elevation matrix (DEM)
that stores the elevations of regularly sampled terrain
points. Elevations of intermediate points are usually
approximated using some interpolation process (Li
et al., 2005).
An important group of GIS applications concerns
visibility, i.e., determining the set of points that are
visible from some particular point, called observer.
The observer can be located at some height above
the terrain. These applications include telecommu-
nications, environmental planning, autonomous vehi-
cle navigation and military monitoring (Franklin and
Ray, 1994; Li et al., 2005; Nagy, 1994; Andrade et al.,
2011). One important related problem is the siting
of a given number of observers in order to optimally
“cover the terrain”. These observers may represent
radio, TV, Internet or mobile phone towers, or mon-
itoring cameras or towers (Ben-Moshe, 2005; Ben-
Shimol et al., 2007). As described in (Nagy, 1994),
this is an NP-Hard problem and, therefore, there is no
known efficient algorithm to find its optimal solution.
However, even obtaining approximate solutions
for this optimization problem demands a long pro-
cessing time, particularly when processing large
quantities of data. One way to reduce this processing
time is to design parallel algorithms based on general
purpose graphics processing units (GPGPUs), which
are present in most current graphics cards.
This paper deals with an instance of the multiple
observers siting problem where the goal is to deter-
mine a set of observers on a terrain represented by
an elevation matrix such that these observers together
can achieve a given visual coverage of the terrain. In
(Franklin, 2002), the author presented a solution for
this problem based on greedy strategy and, in this pa-
per, we extend that method including a local search
heuristic based on a swapping strategy to achieve a
better terrain coverage using the same number of ob-
servers. As the main contribution of this paper, this
heuristic was implemented in parallel using Graphics
Processing Units (GPUs) and dynamic programming.
The extended method proposed in this paper,
named SiteGSM (from Site using GPU’s shared mem-
367
Pena G., Andrade M., Magalhães S., Franklin W. and Ferreira C..
An Improved Parallel Algorithm Using GPU for Siting Observers on Terrain.
DOI: 10.5220/0004884303670375
In Proceedings of the 16th International Conference on Enterprise Information Systems (ICEIS-2014), pages 367-375
ISBN: 978-989-758-027-7
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
ory), was compared with some other methods for
siting observers on terrain such as (Franklin, 2002;
Franklin and Vogt, 2006; Magalh˜aes et al., 2010a;
Magalh˜aes et al., 2011) and, as the tests showed,
our method achieves a better performance than all of
them: it is faster than (Magalh˜aes et al., 2010a; Ma-
galh˜aes et al., 2011) (in some cases, more than 20
times faster than both) or it can use a smaller num-
ber of observers than (Franklin, 2002; Franklin and
Vogt, 2006) to cover the terrain (which may represent
an important improvement since the observer can be
an expensive facility as, for example, a communica-
tion tower).
2 BACKGROUND
2.1 Terrain Visibility Definitions
A terrain represents a region of the earth surface
where the terrain’s value at any point is the elevation
of the corresponding point of the earth surface above
a reference ellipsoid called the geoid that represents
sea-level. For this paper, a terrain is represented by a
matrix of elevation posts on a square grid, whose ver-
tical and horizontal spacing is uniform either in dis-
tance, e.g., 10m, or in angle, e.g. 1 arc-second.
An observer is a point in the space that “wants”
to see or communicate with other points in the space,
called targets. As usual, the notations for observer
and target are O and T. The base points of O and T
are the points on the geoid directly below O and T
respectively, which are denoted as O
b
and T
b
. Both
O and T are at height h ≥ 0 above O
b
and T
b
. All
symbols that appear in this work are shown in table 2.
The radius of interest, R, of O is the radius of the
circle centered on O
b
that contains all points that can
be seen by the observer in the absence of obstructions.
E.g., if O is a radio transmitter, R is a function of the
transmitter power and receiver sensitivity. For con-
venience, R is usually compared to the distance be-
tween O
b
and T
b
rather than between O and T, which
is equivalent when h is much smaller than the radius
of the earth.
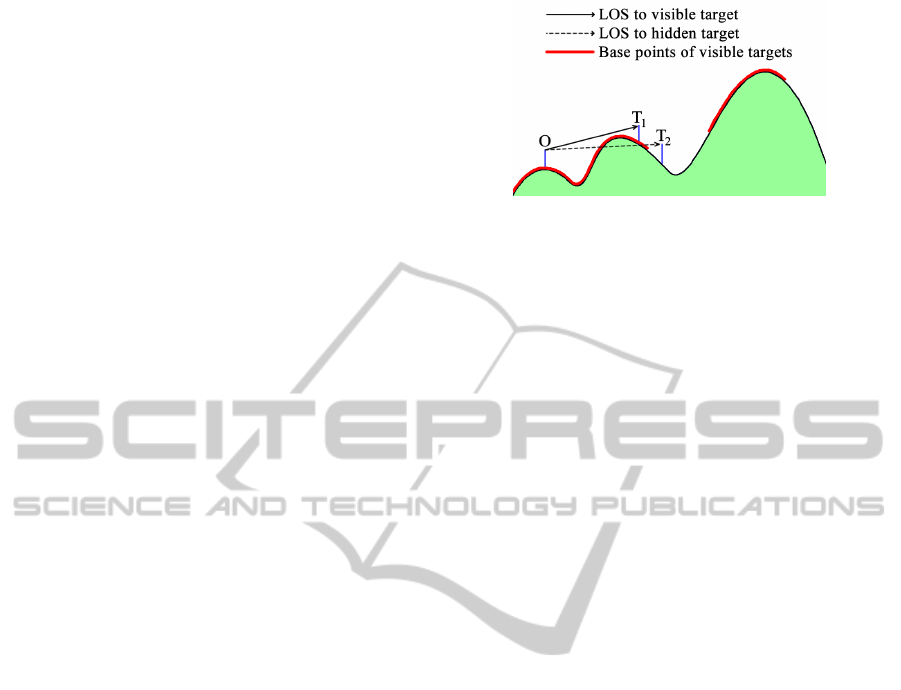
A target T is visible from O iff |T
b
− O
b
| ≤ R and
there is no terrain point blocking the line segment,
called the Line of Sight (LOS), between O and T; see
Figure 1. In this Figure, T
1
is visible from O but T
2
is
not.
The viewshed, V, of O is the set of base points
whose corresponding targets are visible from O. In
general, V is stored as a bit matrix where 0 represents
a non-visible point and 1 represents a visible point.
Figure 1: Visibility queries using a line of sight.
The visibility index, ω, of O is the number of tar-
gets that are visible from O. Points with a large ω are
usually good candidate places to site observers in or-
der to maximize the area of the terrain that is seen by
at least one observer (Franklin and Ray, 1994).
The joint viewshed, V , of a set of observers S =
{O
i
} is the union of the individual viewsheds V
i
, i.e.,
the bitwise-or of their bit matrices.
The joint visibility index, Ω, of S is the number of
targets in the terrain that are visible from at least one
observer in S . Usually, Ω is normalized as a percent-
age of the terrain area.
Multi-observer siting means optimizing the loca-
tions of a set of observers such that Ω is as large as
possible. This is an NP-Hard problem (Nagy, 1994)
and has important practical facilities-location applica-
tions, such as siting mobile phone towers, fire moni-
toring towers, and radar systems.
In this paper we will consider the following equiv-
alent multi-observer siting problem: to obtain a set of
observers whose joint visibility index Ω is, at least, a
given percentage of the terrrain.
2.2 Parallel Programming Using
General Purpose GPU
The programming architectures that allow using
GPU units’ parallel computing power (as, for ex-
ample, the Compute Unified Device Architecture
(CUDA) (NVIDIA, 2013)) have led to the develop-
ment of many algorithms that achieve high computa-
tion performances.
CUDA has made possible the development of al-
gorithms to solve time-consuming problems using the
large number of parallel multiprocessors as well as
the high memory bandwidth provided by GPUs. To
accomplish high-performance computing, it is neces-
sary to develop parallel algorithms that are totally or
partially executed on the GPU.
The CUDA-enabled graphics cards are composed
of multiple processors, more specifically, Single In-
struction Multiple Data (SIMD) processors called
Stream Multiprocessors (SMs), which allow the ex-
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
368

Figure 2: Comparison between GPUs and CPUs structures.
Source: (NVIDIA, 2013)
ecution of multiple parallel threads. Thus, GPU pro-
cessors can efficiently execute instructions involving
many operations with data parallelism, i.e., when the
same operation is applied to different data.
According to NVIDIA, GPUs can provide greater
processing powerthan CPUs because they are special-
ized in performing parallel tasks involving many cal-
culations. On the other hand, the CPUs are designed
to perform tasks involving execution flow control and
data cache. The physical difference between both ar-
chitectures can be visualized in Figure 2: GPUs dedi-
cate most of their area for processing units (in green),
while CPUs dedicate most of their area for execution
control and data cache (in yellow and orange, respec-
tively).
A CUDA application consists in code that is exe-
cuted on CPU and functions (called kernels) that are
executed on GPU. The GPU is able to do parallel pro-
cessing by creating threads such that each thread may
execute the kernel operations in different data. Thus,
the GPU is used as a coprocessor that is able to per-
form certain tasks more efficiently than the CPU.
3 RELATED WORK
There are some important work related to the problem
addressed on this paper. In (Ben-Moshe, 2005), the
author presented an algorithm to site facilities using
an approach based on radio locator, frequency alloca-
tion and connectivity. The input includes a weighted
set of demand locations, a set of feasible facility lo-
cations and a distance function that measures the cost
of travel between a pair of locations. In (Ben-Shimol
et al., 2007), the authors described an algorithm to
site a minimal set of fixed-access relay antennas on
a given terrain to generate the communication links
between multiple base stations. Although the goal of
these two works is not to achieve a given coverage of
the terrain, they are related to the problem addressed
on this paper because they use some important con-
cepts related to our approach.
Other papers describing solutions to site observers
on terrains are (Franklin and Vogt, 2004a; Franklin
and Vogt, 2004b; Franklin and Vogt, 2006). They are
based on the method Site proposed in (Franklin, 2002)
which is described in section 4 and, as mentioned be-
fore, this method uses a greedy strategy to site ob-
servers on a terrain. In (Magalh˜aes et al., 2010b),
the method Site was extended to process huge ter-
rains stored in external memory where the main idea
is to subdivide the terrain in smaller pieces (subre-
gions) and process each piece in the internal memory.
In order to consider the influence of observers sited
near to the borders of the subregions, each subregion
is augmented with a band of width R (the observer ra-
dius of interest) around it. Additionally, the viewshed
representation used in the original method Site was
improved to require a smaller amount of memory.
In (Magalh˜aes et al., 2010a; Magalh˜aes et al.,
2011) were presented two additional methods to site
observer on terrains. They are described in section 5
and both are based on the method Site. In (Magalh˜aes
et al., 2010a), the original method Site was extended
including a local search heuristic to try to reduce the
number of observers selected to achieve the desired
coverage. In (Magalh˜aes et al., 2011), some routines
used in the method proposed in (Magalh˜aes et al.,
2010a) were implemented in parallel using GPU.
In this paper, we present a more efficient paral-
lel implementation of the method described in (Ma-
galh˜aes et al., 2010a) that uses a faster implementa-
tion (in parallel) of the local search. In section 5, we
present a better description of the method proposed in
this paper and also, the differences with the method
presented in (Magalh˜aes et al., 2011).
4 THE SITE METHOD
Considering that the observer siting problem is NP-
Hard, Franklin (Franklin, 2002; Franklin and Vogt,
2006) proposed an approximate heuristic solution,
called Site, to find a set of observers to cover the ter-
rain. More precisely, this method uses a greedy ap-
proach to obtain a set S of observers such that a given
percentage of the terrain is covered. Initially, S = {}
and a set P = {P
i
} of candidate observers is selected.
Then, at each step, the P
i
that will most increase the
current joint visibility index of S is inserted into S .
As described in (Franklin, 2002), the details are as
follows.
1. Estimate the visibility index of each point in the
terrain M. More precisely, determine the points
that have a certain minimum visibility index with
a certain confidence level. This may be achieved
by sampling random targets.
AnImprovedParallelAlgorithmUsingGPUforSitingObserversonTerrain
369

2. Compute P = {P
i
} as the set of points with the
largest visibility indices. However, do not se-
lect two points that are too close together, since
their viewsheds will probably overlap consider-
ably, and hence, some of them will be redundant.
3. Compute V
i
, the viewshed of each P
i
.
4. Initialize S = {}. This will accumulate the set of
actual observers S ⊆ P .
5. Initialize V , the joint viewshed of S , that is, the
union of the viewsheds of all P
i
in S .
6. Repeat the following until a termination condi-
tion is satisfied. Typical conditions require |S| to
achievea certain maximum, or V to achievea cer-
tain minimum of visible points.
(a) Iterate through P to find the P
i
that will cause
the joint visibility index Ω to increase the most.
That involves repeatedly counting the number
of 1 bits in the union of the joint viewshed V
and V
i
.
(b) Insert that P
i
into S and update V .
5 OBSERVER SITING IN GPU
In (Magalh˜aes et al., 2010a) was presented an ex-
tension of the method Site, named Site+, where
some heuristics were included to achieve a same
terrain coverage using fewer observers. In order
to make these heuristics more efficient, the method
SiteGPU (Magalh˜aes et al., 2011) implemented the
following operations in GPU: (1) computing the vis-
ibility index of viewsheds; (2) finding the candidate
observer that will most increase the visibility index
of a joint viewshed; and (3) computing the union of
viewsheds. In this implementation it was used the
following strategy: all data (the viewsheds and joint
viewsheds) were kept in the GPU global memory and
the heuristics were executed on CPU. Thus, the GPU
was used as a coprocessor to efficiently perform oper-
ations requested by the heuristics.
Also, to accelerate the viewshed operations, in
SiteGPU the viewsheds were represented as a small
piece of the terrain matrix. More precisely, each view-
shed was represented by a (2R+ 1) × (2R+ 1) matrix
where R is the radius of interest of the observer which
is sited on this matrix center. That strategy improves
the algorithm efficiency because the points outside the
observer’s radius of interest are not considered, since
they are, by definition, not visible.
The main operation performed by Site+ is the
swap heuristic that tries to increase the joint visibility
index of the current partial solution without changing
the number of observers selected. The basic idea is
to check whether swapping a selected observer (in the
current partial solution) with another observer didn’t
selected yet will increase the joint visibility index.
This checking step considers all pairs composed by
one observer in the partial solution and another one
not in that solution and selects the pair that causes the
highest contribution for the joint visibility index.
Notice that increasing the joint visibility index
of a partial solution can reduce the number of steps
required by the greedy strategy to achieve the final
solution and, thus, the required coverage could be
achieved using a smaller number of observers (that
could be an importantimprovementsince the observer
can be an expensive facility, such as a cellular tower).
But, on the other hand, this local search performs sev-
eral viewshed operations and it is often the bottleneck
of both Site+ and SiteGPU.
In this paper we propose a more efficient method,
named SiteGSM, to site observers on terrain. It is
based on Site+ and includes a faster implementa-
tion of the local search using dynamic programming
and GPU’s shared memory which is much faster than
the GPU’s global memory (used by SiteGPU). It is
important to mention that both methods Site+ and
SiteGSM obtain exactly the same solution, that is,
the same number of observers (sited on same terrain
places) and, of course, the same terrain coverage. The
difference is that SiteGSM is much faster than Site+.
5.1 The Local Search - Swap
Given a set with n candidate observers, let A =
{V
1
, ·· · , V
n
} be the set with their corresponding view-
sheds, that is, V
i
is the viewshed of observer i and let S
be a subset of A with k viewsheds representing an ini-
tial solution for the observer siting problem. The goal
of the swap heuristic is to iteratively change S in or-
der to increase the joint visibility index while keeping
constant the number of observers in S.
The local search method is based on the concept
of neighborhood of a solution which can be defined as
follows: given a solution S =
V
i
1
, ·· · , V
i
k
, a neigh-
bor of S is a solution S
′
where an element of S is re-
placed by another element not in S. See Figure 3. In
each iteration the current solution is replaced by its
best neighbor (the one with highest visibility index).
The process of replacing the current solution with
its best neighbor is repeated until it is obtained a so-
lution having no better neighbor, which is a local op-
timum.
To simplify the notation, a solution S =
{V
i
1
, ·· · , V
i
k
} will be written as S = {i
1
, ·· · , i
k
} in-
dicating that the solution is, in fact, correspond to
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
370

Figure 3: Given A = {V
1
, V
2
, V
3
, V
4
, V
5
}, S
′
are the neighbors
of the solution S = {V
1
, V
2
, V
3
}.
the joint viewshed of the observers whose indices are
i
1
, ·· · , i
k
. Thus, the heuristic may be implemented
(sequentially) as follows: given the set of candidate
viewsheds A = {V
1
, ·· · , V
n
}, let S be a solution com-
posed of k viewsheds, i.e., S = {i
1
, ·· · , i
k
} such that
the joint viewshed of S is V
i
1
⊕ · ·· ⊕V
i
k
where ⊕ rep-
resents the union operation between two viewsheds.
Furthermore, let V
r
be the joint viewshed of all
viewsheds in S exceptV
i
r
. In each iteration, the neigh-
bors of S are generated in order to find the best solu-
tion for the next iteration. The visibility indices of the
neighbor solutions are calculated by computing the
number of visible points in V
r
⊕V
j
for r = 1···k and
j = 1· ·· n with j 6= r.
The most time-consuming step in this heuristic is
computing the joint visibility index for each neighbor
solution. Algorithm 1 presents the code for this step
that computes the number of visible points in V
r
⊕V
j
(for all r = 1···k and j = 1··· n; j 6= r) and stores
them in the element Vix[r][ j]. In the next step, this
matrix will be used to find the best neighbor of S.
For efficiencyimprovement, in this work the view-
sheds are packed in 64-bit words (where each word
represents the visibility of 64 points). Thus, the view-
shed unions and visibility indices can be computed
using, respectively, bitwise-or operator and bit pop-
ulation count functions, which are available in the
hardware of most current computers.
5.2 An Efficient Swap Heuristic
Implementation
Notice that, to generate V
r
, for r = 1· ··k, Algo-
rithm 1 performs Θ(k
2
) union operations ⊕, where
each union operation involves Θ(vsize) positions in
the viewshed matrices. But, as described below, this
step can be improved considerably using dynamic
programming.
Given a solution S = {i
1
, ·· · , i
k
}, i.e., V
i
1
⊕ ··· ⊕
Algorithm 1 : Calculate the Vix matrix where vsize is
the number of points in each viewshed, k is the num-
ber of observers in the solution S and n is the num-
ber of candidate observers. The output is matrix Vix,
where Vix[r][ j] is the joint visibility index of a solu-
tion replacing observer r with j.
1: Vix[k][n] ← {{0}}
2: V [k][vsize] ← {{0}}
3: for r ← 1to k do
4: for m ← 1to k do
5: if r 6= m then
6: for w ← 1to VSize do
7: V [r][w] ← V [r][w] or V[S[m]][w]
8: end for
9: end if
10: end for
11: end for
12: for r ← 1to k do
13: for j ← 1to n do
14: for w ← 1to vsize do
15: Vix[r][ j] ←Vix[r][ j]+(V [r][w] orV[ j][w])
16: end for
17: end for
18: end for
19: return Vix
V
i
k
, for each r ∈ {1, ·· · , k}, we have V
r
= (V
i
1
⊕ ·· ·⊕
V
i
r−1
)⊕(V
i
r+1
⊕···⊕V
i
k
). Doing λ
−
r
= V
i
1
⊕···⊕V
i
r−1
and λ
+
r
= V
i
r+1
⊕···⊕V
i
k
we can observe that both λ
−
r
and λ
+
r
can be obtained by the following recurrence
relations:
λ
−
1
=
/
0 and λ
−
r
= λ
−
r−1
⊕V
i
r−1
for all r ∈ 2, ··· , k
λ
+
k
=
/
0 and λ
+
r
= V
i
r+1
⊕ λ
+
r+1
for all r ∈ 1, ··· , k− 1
For example, Figure 4 illustrates V
r
computation
for k = 5: in this figure, each row r represents the
value of V
r
where the elements in the left of the r-
th column represents λ
−
r
and in the right, λ
+
r
. Notice
that λ
−
4
can be computed by joining the viewsheds V
i
1
and V
i
2
(which is the value of λ
−
3
) with viewshed V
i
3
.
On the other hand, the λ
+
values can be computed in
similar way using the reverse order.
Based on these recurrence relations, Algorithm 2
uses dynamic programming to compute a matrix V
that stores V
r
, for r = 1·· ·k. Notice that this algo-
rithm performs only Θ(k) viewshed unions and can
replace the piece of code composed by lines 2 to 11
in Algorithm 1 where are performed Θ(k
2
) viewshed
unions.
In SiteGSM, the Algorithm 2 was implemented
in GPU using the following strategy: the viewsheds
were kept in GPU’s global memory and, then, the
AnImprovedParallelAlgorithmUsingGPUforSitingObserversonTerrain
371
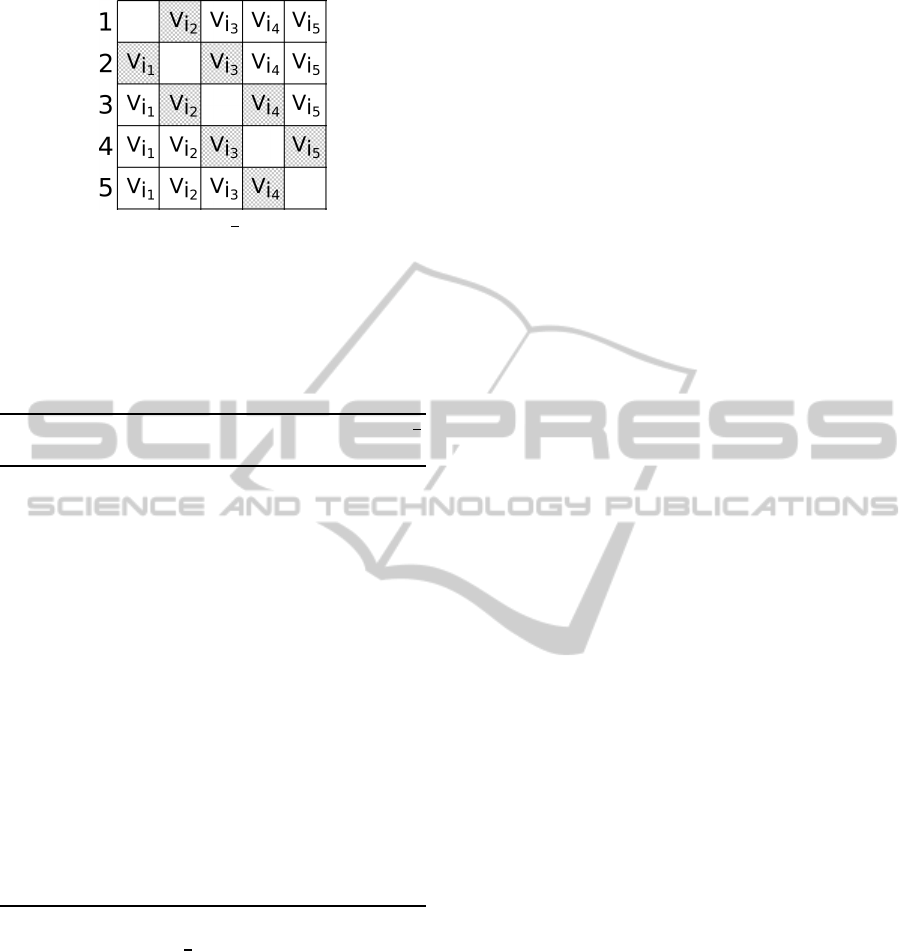
Figure 4: Matrix illustrating V
r
in a solution with k = 5
observers.
union of viewsheds (loop in lines 3, 9 and 15 of Algo-
rithm 2) were performed using GPU’s threads, that is,
each thread performs a bitwise-or operation with one
element of a viewshed and the corresponding element
of another viewshed.
Algorithm 2 : Compute the matrix V that stores V
r
,
for r = 1··· k using a dynamic programming strategy.
1: V
1
[k][vsize] ← {{0}}
2: for r ← 2 to k do
3: for w ← 1 to vsize do
4: V
1
[r][w] ← V
1
[r− 1][w] or V[S[r− 1]][w]
5: end for
6: end for
7: V
2
[k][vsize] ← {{0}}
8: for r ← k− 1 to 1 do
9: for w ← 1 to vsize do
10: V
2
[r][w] ← V
2
[r+ 1][w] or V[S[r+ 1]][w]
11: end for
12: end for
13: V [k][vsize] ← {{0}}
14: for r ← 1 to k do
15: for w ← 1 to vsize do
16: V [r][w] ← V
1
[r][w] or V
2
[r][w]
17: end for
18: end for
After computing V
r
, the next step is to compute
the joint visibility index of the neighbor solutions, as
performed by lines 12 to 18 in Algorithm 1. A staight-
forward implementation of this step in GPU was pre-
sented in (Magalh˜aes et al., 2011), where all view-
sheds are kept in the GPU’s global memory and, then,
each element of matrix Vix (that stores the joint vis-
ibility index) is computed using a parallel algorithm
to overlap a pair of viewsheds followed by a parallel
reduction operation to determine the number of visi-
ble points. However, this strategy does not take ad-
vantage of the GPU performance efficiently because
it requires too many accesses to the global memory,
which is much slower than other memories such as
the shared memory.
In order to make a better use of the GPU mem-
ory hierarchy, we propose a new strategy based on
a fast GPU matrix multiplication algorithm. Notice
that the joint visibility index, that is, the Vix matrix,
is obtained in lines 12 to 18 of Algorithm 1, where
the matrices V and V are overlapped using a bitwise-
or operation. In this case, the two matrices are swept
in a row major order, but the matrices could be reor-
ganized such that the overlapping could be computed
using an access pattern similar to matrix multiplica-
tion. More precisely, line 15 in Algorithm 1 can be
replaced with
Vix[r][ j] ← Vix[r][ j] + V [r][w] or V
T
[w][ j]
where V
T
is the transposed matrix of V.
Thus, the Vix matrix can be computed using a sim-
ple adaptation of some very fast algorithm for matrix
multiplication in GPU. In particular, we adapted the
algorithm presented in (NVIDIA, 2013), replacing the
multiplication operation by a bitwise-or followed by
a binary population count operation. This algorithm
subdivides the matrices into blocks, which are loaded
iteratively in the GPU’s shared memory as the multi-
plication process is performed. Therefore, most of the
algorithm accesses are to the shared memory which is
much faster than the global memory.
Additionally, since the viewsheds matrices are,
usually, sparse (the points outside the observer’s ra-
dius of interest are always non visible), we adapted
the matrix multiplication algorithm to avoid loading
and processing matrix blocks where all the elements
are 0.
6 EXPERIMENTAL RESULTS
The method SiteGSM was implemented in
C++/CUDA and compiled using nvcc 4.0 with
maximum optimization level (-O3). It was compared
against SiteGPU (Magalh˜aes et al., 2011) and against
Site+ (Magalh˜aes et al., 2010a), a sequential CPU
version with no use of dynamic programming. The
tests were executed on a computer with Dual Intel
Xeon E5-2687 3.1GHz, 128GiB of memory and
GPU NVidia Tesla Kepler K20x with 6GiB of global
memory, 48KB of shared memory per block and
2688 CUDA processing cores running Ubuntu 12.04
LTS.
The tests used different datasets obtained from
NASA SRTM webpage: a terrain with 1201 × 1201
points (90-meter resolution SRTM3 terrain) repre-
senting a region of the Minas Gerais state in Brazil
and another terrain with 3601×3601points (30-meter
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
372
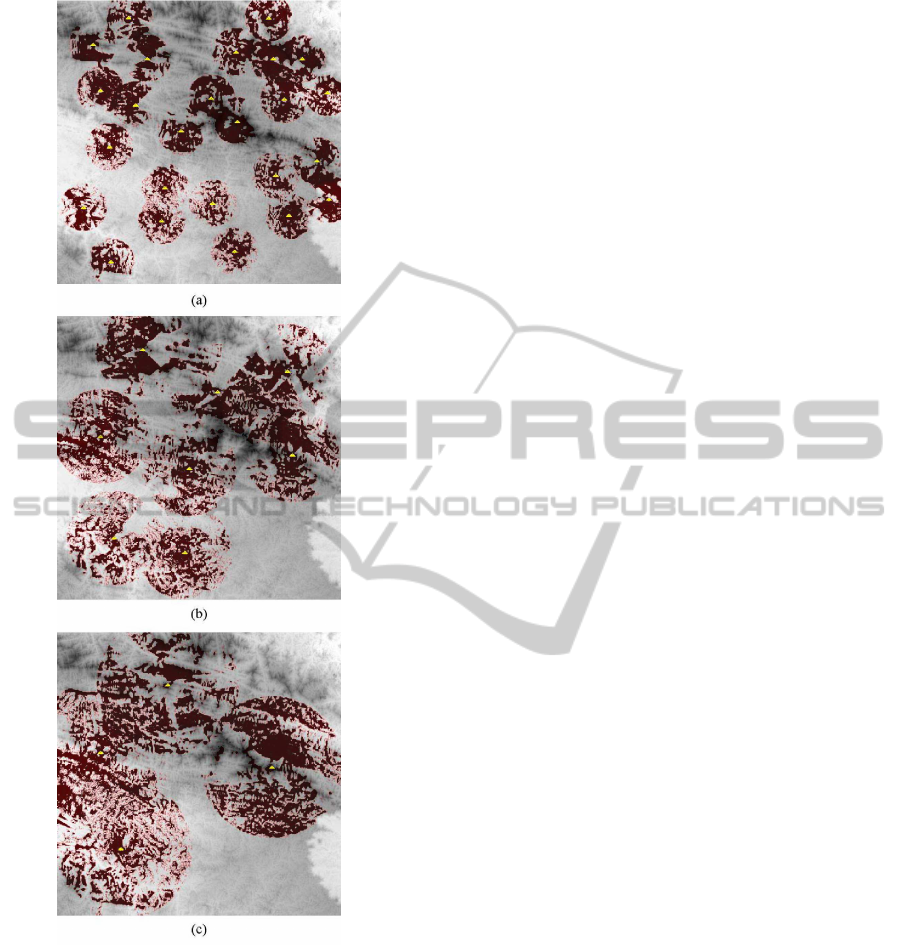
Figure 5: Observers sited in terrain 1201
2
with desired cov-
erage 25% and radii of interest: 100 (a), 200 (b) and 300 (c).
The observers are indicated by yellow triangles and visible
points are showed in red.
resolution SRTM1 terrain) representing a region of
the New Jersey state in USA.
The initial set P of candidate observers for each
terrain was computed using steps 1 to 3 of the Site
method proposed by (Franklin, 2002) and described
in section 4. The Site was set up to select 1000 candi-
dates for the smaller terrain and 3000 candidates for
the larger one, as in (Magalh˜aes et al., 2011). Also,
the viewsheds of all candidate observers were com-
puted using the same viewshed algorithm used by
Site, with the observers and target points sited 30 me-
ters above the terrain. This value was chosen because,
in general, it is the height of real towers, as for exam-
ple, communication antennas (Delmellea et al., 2005).
The observer siting methods were tested using
radii of interest 100, 200 and 300 points for the first
terrain; and 200, 300 and 400 points for the second
terrain. For each terrain, the desired coverages (joint
visibility indices) were 75%, 85% and 95% of the ter-
rain area. Figure 5 shows three examples, with radii
of interest 100, 200 and 300 and desired coverage of
25%, indicating how observers were sited on the ter-
rain.
Table 1 presents the processing time (in seconds)
spent by each method. Column #Obs shows the num-
ber of observers sited in each case and the SiteGSM’s
speedup is shown in parentheses. The symbol * repre-
sents a case for which the set P of candidate observers
is not enough to achieve the desired coverage. The
symbol ∞ indicates those cases where the processing
time is greater than 7 hours.
As the tests showed, in all cases, the method
SiteGSM proposed in this paper was faster than
SiteGPU (Magalh˜aes et al., 2011) - in some cases,
more than 20 times - and, as expected, much faster
than the Site+ (more than 1200 times). Notice that,
in almost all cases, the higher the desired coverage,
the higher the speedup. This can be explained by the
fact that higher coverages require more observers and
consequently more viewsheds must be processed.
While much faster than Site+, SiteGSM obtains
the same solution as the former and, as presented in
(Magalh˜aes et al., 2010a), the Site+ can achieve sim-
ilar terrain coverage as the original Site using about
10% less observers. This can be an important (eco-
nomic) improvement since the observers can repre-
sent some expensive facility, as for example, a com-
munication antenna.
7 CONCLUSION
We presented an efficient implementation of a heuris-
tic to site observers on terrains to achieve a given cov-
erage of this terrain. The method is based on an exten-
sion of Site (Franklin, 2002), where it was included a
local search strategy that tries to improve the cover-
age obtained by a fixed number of observers. This lo-
cal search was implemented in parallel using graphics
processing units and also dynamic programming.
As the tests showed, the method described in this
paper is more efficient than a previous method pre-
sented in (Magalh˜aes et al., 2011) and, in some cases,
AnImprovedParallelAlgorithmUsingGPUforSitingObserversonTerrain
373
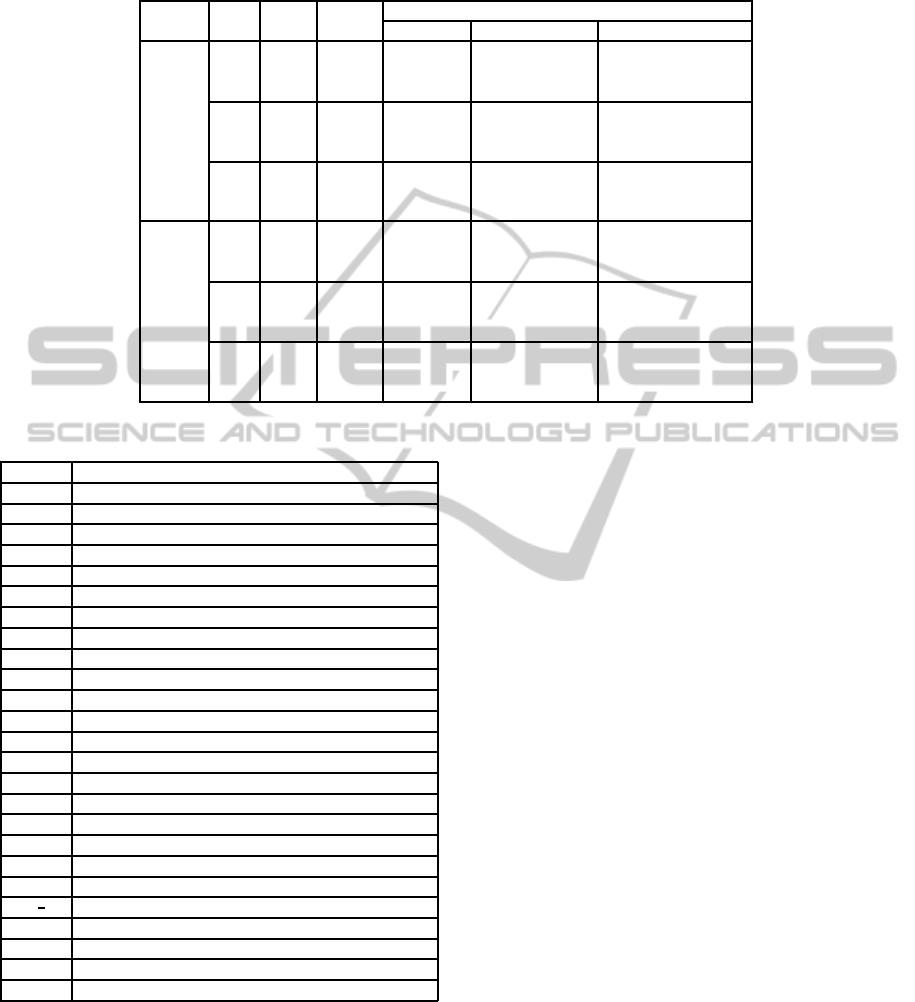
Table 1: Processing time (in seconds) of three methods: two parallel methods using GPU (SiteGSM and SiteGPU) and a
sequential one (Site+) to site observers on terrains with different sizes considering different radii of interest (R) to achieve
some desired coverages (Ω).
Ter. R Ω #Obs.
Processing Time (in sec.)
SiteGSM SiteGPU Site+
1201
×
1201
100
75% 162 12 180 (15.0) 11010 (917.5)
85% 299 33 545 (16.5) ∞ (-)
95% * * * (-) * (-)
200
75% 55 3 35 (11.7) 1304 (434.7)
85% 97 6 104 (17.3) 4020 (670.0)
95% 323 48 888 (18.5) ∞ (-)
300
75% 34 2 19 (9.5) 479 (239.5)
85% 62 4 70 (17.5) 1826 (456.5)
95% 216 28 566 (20.2) 19408 (693.1)
3601
×
3601
200
75% 81 76 422 (5.6) ∞ (-)
85% 97 110 708 (6.4) ∞ (-)
95% 125 183 1341 (7.3) ∞ (-)
300
75% 36 28 160 (5.7) ∞ (-)
85% 42 41 276 (6.7) ∞ (-)
95% 54 66 523 (7.9) ∞ (-)
400
75% 20 14 81 (5.8) 14867 (1061.9)
85% 24 19 124 (6.5) 22869 (1203.6)
95% 30 30 270 (9.0) ∞ (-)
Table 2: Table of notations.
Symbol Description
O Observer
T Target
O
b
Observer’s base point
T
b
Target’s base point
h Height of an observer or target above terrain
R Radius of interest of an observer
V Viewshed of an observer
ω Visibility index of an observer
S Set of observers
V Joint viewshed of a set of observers
Ω Joint visibility index of a set of observers
P Set of candidate observers
n Number of candidate observers
A Set of candidate observers
S Subset of A
k Number of observers in S
S
′
Neighbor solution of S
i
1
, ··· , i
k
Observers Indices
⊕ Union operation between two viewsheds
V
i
k
Viewshed of the observer k in S
V
r
Joint viewshed of all viewsheds in S except V
i
r
vsize Number of points in each viewshed
Vix[r][ j] Joint visibility index of a solution replacing observer r with j
λ
−
r
Union between the viewsheds V
i
1
···V
i
r−1
λ
+
r
Union between the viewsheds V
i
r+1
···V
i
k
more than 20 times faster. Also, it is up to 1200 times
faster than the corresponding sequential implementa-
tion.
This is an interesting contribution since the ex-
tended method Site+ using local search heuristic can
achieve a desired coverage using a smaller number of
observers than the original Site and thus, better solu-
tions can be generated faster.
As a next step, to improve the proposed method
performance even more, we will try to reduce the
viewshed matrix size using only a bounding box con-
taining the observer radius of interest. Thus, it will be
possible to reduce the volume of data to be processed
and, in this case, it seems that we could compute the
joint visibility indices adapting a GPU sparse matrix
multiplication algorithm.
ACKNOWLEDGEMENTS
This work was partially supported by FAPEMIG,
CNPq, CAPES, GAPSO and NSF IIS-1117277.
REFERENCES
Andrade, M. V. A., Magalh˜aes, S. V. G., Magalh˜aes, M. A.,
Franklin, W. R., and Cutler, B. M. (2011). Efficient
viewshed computation on terrain in external memory.
GeoInformatica, 15(2):381–397.
Ben-Moshe, B. (2005). Geometric Facility Location Opti-
mization. PHD thesis, Ben-Gurion University, Israel,
Department of Computer Science.
Ben-Shimol, Y., Ben-Moshe, B., Ben-Yehezkel, Y., Dvir,
A., and Segal, M. (2007). Automated antenna posi-
tioning algorithms for wireless fixed-access networks.
Journal of Heuristics, 13(3):243–263.
Delmellea, E. M., Rogersonb, P. A., Akellad, M. R., Battae,
R., Blattf, A., and Wilsonf, G. (2005). A spatial model
ICEIS2014-16thInternationalConferenceonEnterpriseInformationSystems
374

of received signal strength indicator values for auto-
mated collision notification technology. Transporta-
tion Research Part C: Emerging Technologies, 13(5-
6):432–447.
Franklin, W. R. (2002). Siting observers on terrain. In
Springer-Verlag, editor, In D. Richardson and P. van
Oosterom editors, Advances in Spatial Data Han-
dling: 10th International Symposium on Spatial Data
Handling, pages 109–120.
Franklin, W. R. and Ray, C. (1994). Higher isn’t necessar-
ily better: Visibility algorithms and experiments. In
Advances in GIS research: sixth international sympo-
sium on spatial data handling, volume 2, pages 751–
770. Edinburgh.
Franklin, W. R. and Vogt, C. (2004a). Efficient multiple
observer siting on large terrain cells. GIScience 2004.
Franklin, W. R. and Vogt, C. (2004b). Multiple observer
siting on terrain with intervisibility or lo-res data. In
XXth Congress, International Society for Photogram-
metry and Remote Sensing, Istanbul, pages 12–23.
Franklin, W. R. and Vogt, C. (2006). Tradeoffs when multi-
ple observer siting on large terrain cells. In Springer-
Verlag, editor, 12th International Symposium on Spa-
tial Data Handling, pages 845–861.
Laurini, R. and Thompson, D. (1992). Fundamentals od
Spatial Information Systems. Academic Press.
Li, Z., Zhu, Q., and Gold, C. (2005). Digital terrain model-
ing: principles and methodology. CRC Press.
Magalh˜aes, S. V. G., Andrade, M. V. A., and Ferreira, C.
(2010a). Heuristics to site observers in a terrain repre-
sented by a digital elevation matrix. In GeoInfo, pages
110–121.
Magalh˜aes, S. V. G., Andrade, M. V. A., and Ferreira, R. S.
(2011). Using gpu to accelerate heuristics to site ob-
servers in dem terrains. In IADIS Applied Computing
(AC 2011), pages 127–133. Rio de Janeiro.
Magalh˜aes, S. V. G., Andrade, M. V. A., and Franklin,
W. R. (2010b). An optimization heuristic for siting
observers in huge terrains stored in external memory.
In Hybrid Intelligent Systems (HIS), 2010 10th Inter-
national Conference on, pages 135–140. IEEE.
Nagy, G. (1994). Terrain visibility. Computers & graphics,
18(6):763–773.
NVIDIA (2013). CUDA programming guide. NVIDIA Cor-
poration, July.
AnImprovedParallelAlgorithmUsingGPUforSitingObserversonTerrain
375
