
Vehicle Tracking based on Customized Template Matching
Sebastiano Battiato
1
, Giovanni Maria Farinella
1
, Antonino Furnari
1
, Giovanni Puglisi
1
,
Anique Snijders
2
and Jelmer Spiekstra
2
1
Universit`a degli Studi di Catania, Dipartimento di Matematica e Informatica, Catania, Italy
2
Q-Free, Beilen, Netherlands
Keywords:
Vehicle Tracking.
Abstract:
In this paper we present a template matching based vehicle tracking algorithm designed for traffic analysis
purposes. The proposed approach could be integrated in a system able to understand lane changes, gate pas-
sages and other behaviours useful for traffic analysis. After reviewing some state-of-the-art object tracking
techniques, the proposed approach is presented as a customization of the template matching algorithm by
introducing different modules designed to solve specific issues of the application context. The experiments
are performed on a dataset compound by real-world cases of vehicle traffic acquired in different scene con-
texts (e.g., highway, urban, etc.) and weather conditions (e.g., raining, snowing, etc.). The performances of
the proposed approach are compared with respect to a baseline technique based on background-foreground
separation.
1 INTRODUCTION
Object tracking strategies are formulated by mak-
ing some assumptions on the application domain and
choosing a suitable object representation and a frame-
-by-frame localization method. The object represen-
tation is usually updated during the tracking, espe-
cially when the target object is subject to geomet-
ric and photometric transformations (object deforma-
tions, light changes, etc.) (Maggio and Cavallaro,
2011).
In the Template Matching based strategies (Mag-
gio and Cavallaro, 2011; Yilmaz et al., 2006), the ob-
ject is represented as an image patch (the template)
and is usually assumed to be rigid. In the simplest
settings, the object is searched in a neighbourhood
window of the object’s last known position by max-
imizing a chosen similarity function between image
patches. When target changes of pose are consid-
ered, the Lucas-Kanade affine tracker can be used
(Lucas et al., 1981; Baker and Matthews, 2004). In
the Local Feature Points based strategies (Tomasi and
Kanade, 1991) the object is represented as a set of
key-points which are tracked independently by esti-
mating their motion vectors at each frame. In order
to track each key-point, a sparse optical flow is usu-
ally computed considering the (brightness constancy
assumption (Horn and Schunck, 1981)). The Lucas-
-Kanade Optical Flow (Lucas et al., 1981) algorithm
is often used to compute the optical flow and requires
the key-points to satisfy both spatial and temporal co-
herence. In some cases the set of feature points can
be directly “tracked” for specific application contexts
(e.g., video stabilization (Battiato et al., 2007), human
computer interaction (Farinella and Rustico, 2008),
traffic conflict analysis (Battiato et al., 2013)). In the
Region Based techniques (Comaniciu et al., 2003) the
object is represented by describing the image region
in which it is contained as a quantized probability dis-
tribution (e.g., a n-bins histogram) with respect to a
given feature space (e.g., the hue space). In (Brad-
ski, 1998) the CAMShift algorithm is proposed and
it is suggested to build a probability image project-
ing the target object hue histogram onto the current
frame in order to obtain a map of the most probable
object positions. The object is localized finding the
probability image relative peak in the neighbourhood
of the last known position using the Mean-Shift pro-
cedure (Comaniciu and Meer, 2002). In (Comaniciu
et al., 2003) a similarity measure is derived based on
the Bhattacharyya coefficient providing a similarity
score between the target object representation and the
one of the candidate found at a given position. By us-
ing the Mean-Shift procedure(Comaniciu and Meer,
2002), the similarity measure is maximized with re-
spect to the target candidate
755
Battiato S., Farinella G., Furnari A., Puglisi G., Snijders A. and Spiekstra J..
Vehicle Tracking based on Customized Template Matching.
DOI: 10.5220/0004872607550760
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (PANORAMA-2014), pages 755-760
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
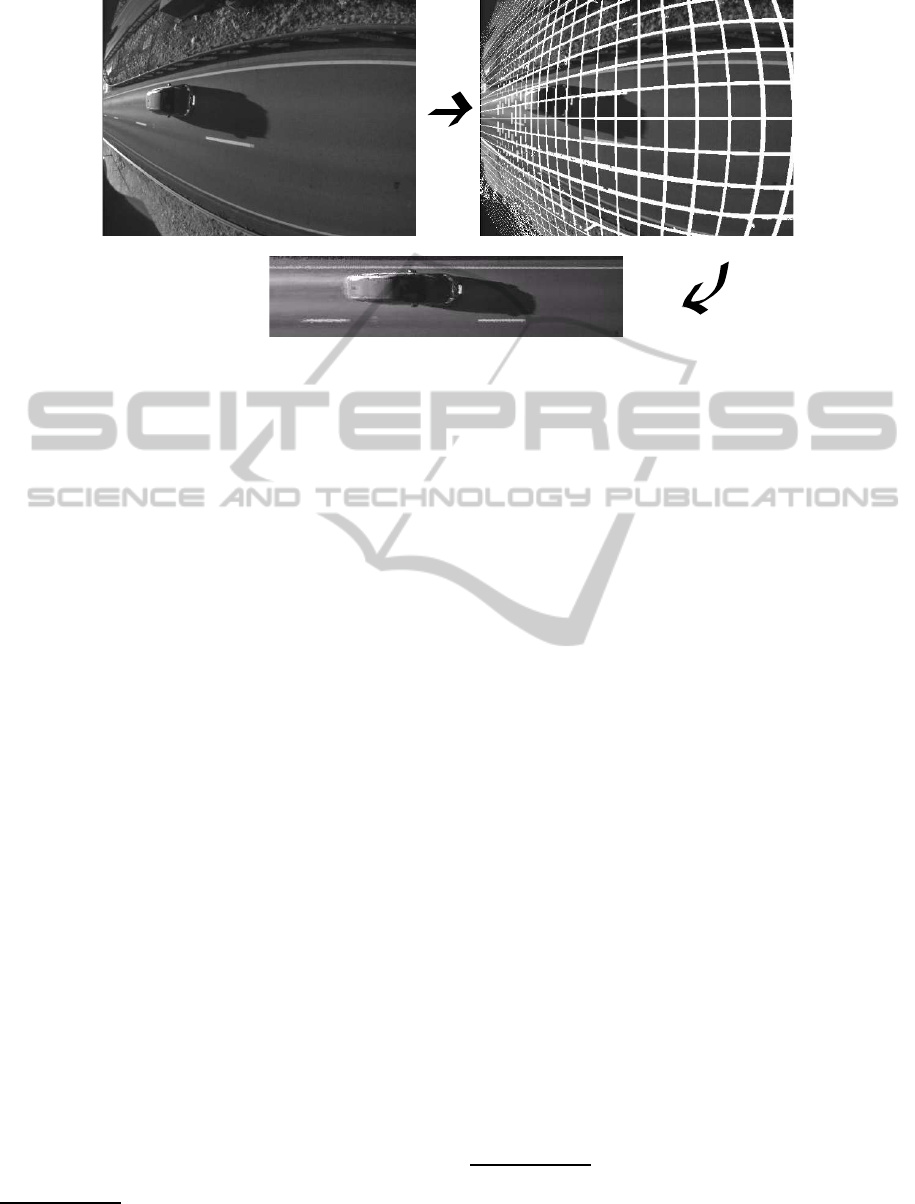
Figure 1: Preprocessing stage and generation of a normalized representation of the scene where the distance between neigh-
bouring pixels is constant in the real world.
In this paper we present a customized vehicle
tracking algorithm based on template matching. The
proposed algorithm is tested on real video sequences
which are characterized by high variability in terms of
perspective, light and contrast changes, object distor-
tion and presence of artefacts. The input sequences
are the result of a preprocessing stage which filters
out the camera distortion. An example of such pre-
processing is reported in Figure 1. In designing the
proposed algorithm the data have played the main
role. In this paper we report the rationale beyond
the build method making connections between the
adopted strategies and the real video sequences.
The remainder of the paper is organized as fol-
lows: in Section 2 the reference video data are dis-
cussed, whereas Section 3 presents the proposed ap-
proach. Section 4 describes the experiments and the
way we have measured the performances of the algo-
rithms. Finally, Section 5 reports the conclusions and
the directions for future works.
2 APPLICATION CONTEXT AND
REFERENCE DATA
The goal of our work is to correctly track each vehi-
cle from the beginning of the scene to the end, assum-
ing that an external detection module based on plate
recognition gives to us the position of the front part of
the vehicle in the first frame in which the plate is de-
tected. The dataset used in the experiments consists of
six video sequences related to real video traffic mon-
itoring which have been acquired by Q-Free.
1
The
1
Q-Free (http://www.q-free.com/) is a global supplier
of solutions and products for Road User Charging and
sequences exhibit high variability in terms of lighting
changes, contrast changes and distortion. Specifically
the input data are the result of a preprocessing stage
which produces a normalized, low resolution repre-
sentation of the scene where the distance between
neighbouring pixels is constant in the real world (Fig-
ure 1). The sequences have been acquired in different
places and under different lighting, weather and en-
vironment conditions and are identified by a keyword
summarizing the main characteristic that the tracker
should deal with, namely: LOW CONTRAST, LIGHT
CHANGES, LEADING SHADOWS, STOP AND GO +
TURN, RAIN and STOP AND GO. The overall se-
quences contain 1168 vehicle transits in total.
3 PROPOSED APPROACH
The proposed approach is based on the general tem-
plate matching scheme: at the initialization step, as-
suming that the plate detection and recognition mod-
ule returned the current vehicle position in the form of
a bounding box, the template is extracted as a portion
of the current frame and the object position is set to
the bounding box centre; at each frame, a search win-
dow is centred at the object last known position and
a number of candidates centred at each point of the
search window and having the same size as the tem-
plate are extracted. The object current position is then
set to the one which maximizes the similarity score
between the target template and the candidate one ac-
Advanced Transportation Management having applications
mainly within electronic toll collection for road financing,
congestion charging, truck-tolling, law enforcement and
parking/access control.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
756

cording to a selected similarity measure; at the end of
the search, the vehicle representation is updated ex-
tracting a new template at the current vehicle position.
We use this general scheme (Maggio and Cavallaro,
2011) as a baseline and augment it by adding some
domain-specific customizations in the form of mod-
ules which can be dynamically switched on (or off) by
a controller. There are four proposed modules: Mul-
ticorrelation, Template Drift and Refinement, Back-
ground Subtraction and Selective Update.
In the following we summarize the scope of each
module used to extend the basic template matching
procedure providing related details. All the parame-
ters’ values are reported in Section 4.
The presence of artefacts (see Figure 2 (a)) con-
tributes to radical changes of the vehicles’ appearance
between consecutive frames. In such cases the simi-
larity between the current instance of the object and
its representation can be low, thus making the tracker
less accurate and possibly leading to a failure. In or-
der to reduce the influence of the artefacts, we act as if
it were an occlusion problem introducing an alterna-
tive way to compute the similarity between two image
patches which is referred to as Multicorrelation: both
the template and the candidate are divided into nine
regular blocks. A similarity score (e.g., Normalized
Cross Correlation) is so computed between each cou-
ple of corresponding blocks and the final score is ob-
tained by averaging the nine subwindows similarity
values. A statistical analysis of the similarity score
values highlighted that when the issue shown in Fig-
ure 2 (a) arises, the similarity measure computed in
the regular way tends to be lower than a given thresh-
old t
m
. So we use the multicorrelation similarity mea-
sure only when the regular similarity score is under
the given threshold. Figure 2 (c) shows the result of
the multicorrelation approach.
The presence of light, perspective, contrast
changes and distortion, joined with the continuous
update of the template, generate the template drift
problem in the form of the progressive inclusion of
the background into the template model. This effect
is shown in Figure 2 (b).
In order to reduce the template drift, a refinement
is performed at the end of the basic template match-
ing search. The refinement is based on the assumption
that the object is stretched horizontally by effect of the
distortion introduced in the preprocessing stage (see
Figure 1). According to this assumption, we adopt
the following strategy: given the current frame and
the template model found at the previous frame, we
search for a version of the object at a smaller hori-
zontal scale, obtaining a smaller tracking box which
will be properly enlarged backward in order to fit the
original template dimensions. Searching for the ob-
ject at different horizontal scales would make the al-
gorithm much slower, so, in order to improve per-
formances, we first perform a regular search (i.e.,
without any refinement) in order to obtain an initial
guess, afterwards we search for the best match among
a number of candidates obtained discarding the right-
most pixels (the ones which are more likely to contain
background information) and horizontally-scaled ver-
sions of the template. The results of the technique are
shown in Figure 2 (d).
When tracking tall vehicles, the perspective issue
shown in Figure 2 (e) arises: the radical change of
the vehicle appearance in consecutive frames leads
to the progressive inclusion of the background inside
the template model up to the eventual failure of the
tracker. In order to correct this behaviour, after a reg-
ular search, we perform a background aware refine-
ment sliding the tracking window backward in order
to remove the background pixels in the front of the
tracking box through a rough background subtrac-
tion technique based on subsequent frames subtrac-
tion and thresholding. The results of the technique
are shown in Figure 2 (g).
The continuous update of the vehicle representa-
tion induces the template drift problem in those se-
quences in which the vehicles move slowly. An ex-
ample of this problem is shown in Figure 2 (f). Since
the vehicle moves very slowly and considering that
the object changes of appearance between two con-
secutive frames are slight, a shifted version of the
template still returns a high similarity score, while
the continuous update favourites the propagation of a
wrong vehicle representation. In order to correct this
behaviour, we update the object representation only
when it is significantly different from the old one, i.e.,
when the similarity score is under a fixed threshold t
u
.
Figure 2 (h) shows the results of the selective update
mechanism.
Due to the different operations involved in the spe-
cific modules, we found the performancesof the mod-
ules to be dependent on the vehicle speed. In order
to maximize the performances of the overall algo-
rithm on the data, we distinguish between high-speed
(60 km/h or more) and low-speed (less than 60 km/h)
vehicles and introduce a controller component which
dynamically enables or disables the modules.
4 EXPERIMENTAL SETTINGS
AND RESULTS
All the experiments have been performed on the
dataset described in Section 2. The sequences have
VehicleTrackingbasedonCustomizedTemplateMatching
757

(a) Artefacts (b) Template Drift
(c) Multicorrelation Results (d) Refinement Results
(e) Perspective Issues (f) Slow Vehicles Template Drift
(g) Background Subtraction Results (h) Selective Update Results
Figure 2: The figure shows the domain specific issues (a, b, e, f) and the results of the modules introduced to deal with them
(c, d, g, h).
been manually labelled annotating for each vehicle
transit, the bounding box of the starting frame and the
final frame. This information is used to initialize the
proposed tracker,
2
which is then executed in the sub-
sequent frames till the last frame of the transit is pro-
cessed. After running the different compared track-
ers, an examination is needed to manually mark each
tracked transit as “successful” or “failed”. We have
also manually annotated the first frame of failure.
The algorithm parameters have been tuned through a
statistical analysis in order to maximize the perfor-
mances on the data. The Normalized Cross Correla-
tion is used as similarity measure for template match-
ing, the search window size is 20 px × 12 px wide,
in order to handle vehicles with a maximum horizon-
tal speed of 381 km/h and a maximum vertical speed
of 32 km/h. The search is performed using an asym-
metrical window (forward only) in order to reduce the
computation (the vehicles can only move forward or
stay still). As we cannot predict an exact horizontal
scaling factor, in the refinement stage, multiple scal-
ing factors have to be explored. Since in the given
context a scaling factor of 0.02 corresponds to less
than 1 px, which is the best precision we can achieve,
and considering that a statistical analysis pointed out
that in most cases the best scaling factor is in the range
[0.90, 1], the scaling factors are taken form this range
at step of 0.02. Both the multicorrelation and the se-
lective update thresholds are set to t
m
= t
u
= 0.8.
In order to analyse the trackers performances, two
evaluation methods are used:
2
We assume that the bounding box is given by another
module related to the plate detection and recognition al-
ready present in the systems.
Transit based Accuracy (TBA): focused on the
ability to correctly track the vehicle in all the
frames of his transit. This measure is defined as:
TBA =
1
N
N−1
∑
i=0
s
t
(T
i
) (1)
where N is the total number of transits,
{T
i
}
i∈[0,N−1]
are the transits and
s
t
(T
i
) =
(
1 if the tracking has no errors
0 otherwise
; (2)
Longevity based Accuracy (LBA): focused on the
tracker longevity, i.e., the mean transit percentage
correctly tracked before a possible failure. This
measure is defined as:
LBA =
1
N
N−1
∑
i=0
s
l
(T
i
) . (3)
where N and T
i
are defined as above,
s
l
(T
i
) =
m
i
n
i
, (4)
m
i
is the number of frames in which the vehicle is
tracked correctly in transit T
i
and n
i
is the total number
of frames in T
i
.
For sake of comparison we have considered
the following approaches: the CAMShift algorithm
(Bradski, 1998) gives poor results since the initial-
ization step in the intensity domain fails. This is
due to the simplicity of the image representation
which doesn’t ensure the maximization of the similar-
ity measure between the target representation and the
candidate one. The Kernel-Based Object Tracking al-
gorithm (Comaniciu et al., 2003) succeeds in the ini-
tialization step but fails in the tracking due to the poor
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
758
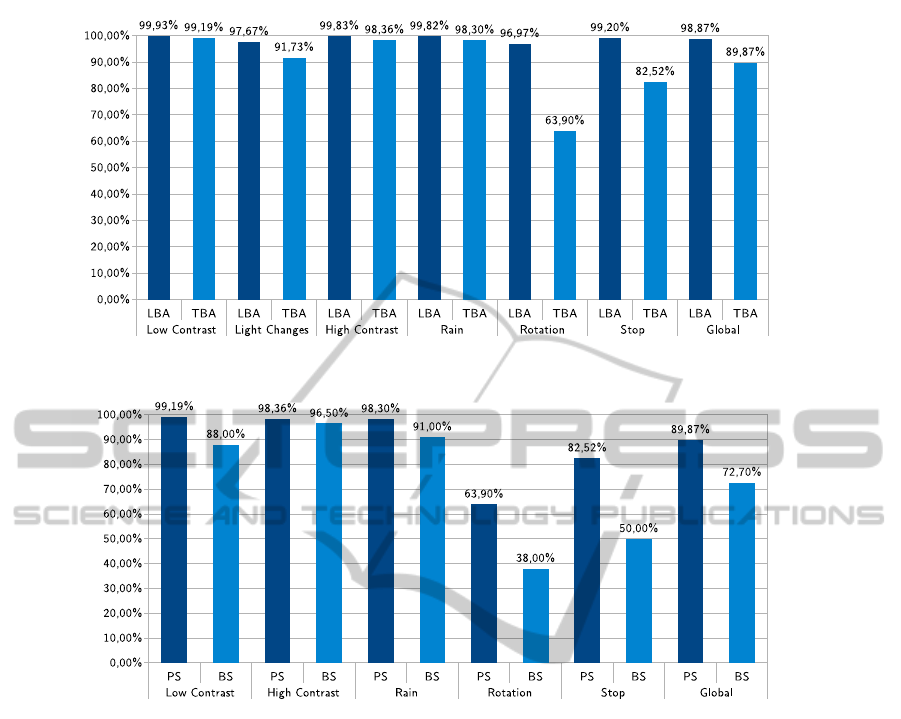
Figure 3: The results of the proposed technique on the sequences identified by corresponding keywords.
Figure 4: The results of the proposed technique (PS) vs a simple background-foreground separation pipeline (BS) according
to the TBA measurement (see Section 4).
separation between the object and the background in
the feature space (intensity values). Both CAMShift
and Kernel-Based Object Tracking do fail in the gra-
dient orientations feature space since the similarity
measure is not a smooth function (no gradient based
optimizations are possible).
Figure 3 shows the results of the proposed ap-
proach for each sequence (identified by its relative
keyword as described in Section 2) and the global
accuracy according to the TBA and the LBA measur-
ing methods. The introduction of the two measuring
methods can be justified observing that they measure
two different qualities of the tracker. In the STOP and
ROTATION sequences, it can be noticed that the TBA
values are consistently lower than the related LBA
values. This happens because the tracker correctly
tracks the object for the most part of the scene (ob-
taining a high LBA score) systematically failing in the
last frames of the transit due to poor lighting (which
gives a zero-weight to the transit in the TBA set-
tings). Figure 4 compares the results of our technique
with respect to the results of a typical background-
-foreground separation pipeline based on first order
time derivative and gradient difference, according to
the TBA measurement.
5 CONCLUSIONS
In this paper we have proposed a template matching
based method for vehicle tracking applications. The
classical template matching algorithm has been cus-
tomized to be able to cope with a series of challenging
conditions related to real word sequences such as high
variability in perspective, light and contrast changes,
object distortions and artefacts in the scene. The ef-
fectiveness of our approach has been then demon-
strated through a series of experiments in critical con-
ditions and comparisons with respect to a baseline
technique. Future work will be devoted to compare
the proposed tracker with respect to recent techniques
(e.g., TLD (Kalal et al., 2009)) as well so to include
VehicleTrackingbasedonCustomizedTemplateMatching
759

a module able to discriminate among different kinds
of vehicles (e.g., car, truck) in order to collect useful
statistics for the traffic analysis.
ACKNOWLEDGEMENTS
This work has been performed in the project
PANORAMA, co-funded by grants from Belgium,
Italy, France, the Netherlands, and the United King-
dom, and the ENIAC Joint Undertaking.
REFERENCES
Emilio Maggio and Andrea Cavallaro. Video tracking: the-
ory and practice. Wiley, 2011.
Alper Yilmaz, Omar Javed, and Mubarak Shah. Ob-
ject tracking: A survey. ACM Computing Surveys,
38(4):13, 2006.
Bruce D. Lucas, Takeo Kanade, et al. An iterative image
registration technique with an application to stereo vi-
sion. In IJCAI, volume 81, pages 674–679, 1981.
Simon Baker and Iain Matthews. Lucas-kanade 20 years
on: A unifying framework. International Journal of
Computer Vision, 56(3):221–255, 2004.
Carlo Tomasi and Takeo Kanade. Detection and tracking of
point features. School of Computer Science, Carnegie
Mellon Univ., 1991.
Berthold K. P. Horn and Brian G. Schunck. Determining
optical flow. Artificial intelligence, 17(1):185–203,
1981.
Sebastiano Battiato, Giovanni Gallo, Giovanni Puglisi, and
Salvatore Scellato. Sift features tracking for video sta-
bilization. In Image Analysis and Processing, 2007.
ICIAP 2007. 14th International Conference on, pages
825–830, 2007.
Giovanni M. Farinella and Eugenio Rustico. Low cost fin-
ger tracking on flat surfaces. Eurographics Italian
Chapter Conference 2008 - Proceedings, pp. 43-48,
2008.
Sebastiano Battiato, Stefano Cafiso, Alessandro Di
Graziano, Giovanni M. Farinella, and Oliver Giudice.
Road traffic conflict analysis from geo-referenced
stereo sequences. International Conference on Image
Analysis and Processing, Lecture Notes in Computer
Science LNCS 8156, pp. 381-390, 2013.
Dorin Comaniciu, Visvanathan Ramesh, and Peter Meer.
Kernel-based object tracking. Pattern Analysis
and Machine Intelligence, IEEE Transactions on,
25(5):564–577, 2003.
Gary R. Bradski. Computer vision face tracking for use in
a perceptual user interface. 1998.
Dorin Comaniciu and Peter Meer. Mean shift: A robust
approach toward feature space analysis. Pattern Anal-
ysis and Machine Intelligence, IEEE Transactions on,
24(5):603–619, 2002.
Zdenek Kalal, Jiri Matas, and Krystian Mikolajczyk. On-
line learning of robust object detectors during unstable
tracking. In Computer Vision Workshops (ICCV Work-
shops), 2009 IEEE 12th International Conference on,
pages 1417–1424. IEEE, 2009.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
760
