
In Search of a Car
Utilizing a 3D Model with Context for Object Detection
Mikael Nilsson and H˚akan Ard¨o
Centre of Mathematical Sciences, Lund University, Lund, Sweden
Keywords:
3D Model, Foreground/Background Segmentation, Context, Traffic, Camera Calibration, Ground-plane.
Abstract:
Automatic video analysis of interactions between road users is desired for city and road planning. A first step
of such a system is object localization of road users. In this work, we present a method of detecting a specific
car in an intersection from a monocular camera image. A camera calibration and segmentation are utilized
as inputs by the method in order to detect a car. Using these inputs, a sampled search space in the ground
plane, including rotations, is explored with a 3D model of a car in order to produce output in form of rectangle
detections in the ground plane. Evaluation on real recorded data, with ground truth for one car using GPS,
indicates that a car can be detected in over 90% of the time with an average error around 0.5m.
1 INTRODUCTION
Access to accurate positions of road users is desirable
in calibration for simulations, finding potential bottle-
necks, and finding potential dangers in existing road
networks. The task of localizing each road user, uti-
lizing one or several cameras, is indeed a desirable
feature. Previous works with similar problem formu-
lation has been approached in several ways. For ex-
ample, some papers explore model based approaches
(Koller et al., 1993; Ferryman et al., 1997; Tan et al.,
1998; Li et al., 2009). Others aim to find an oc-
cupancy map from multiple views (Khan and Shah,
2006). Some formulate the problem in a probabilistic
framework, for example by combining results from
Markov Chain Monte Carlo (MCMC) and a Hidden
Markov Model (HMM) (Song and Nevatia, 2007).
Detection based methods has recently gained some at-
tention (Pepik et al., 2012; Nilsson et al., 2013). Re-
cently, a method utilizing 3D primitives, and monoc-
ular view, presented promising results (Carr et al.,
2012). In that work, cars were modeled as boxes and
pedestrians as cylinders in order to position objects
in the ground-plane. This work proposes a way to
search for a 3D model of a car which is more detailed
than a box. In addition, a 3D context of the object
is proposed to be utilized in order to get a more re-
liable score. One way to look at our proposal is that
we exploit graphics techniques in a brute-force man-
ner (dense sampling and rotation) in order to solve a
computer vision problem. The different parts of the
proposed method can be found in Fig.1.
2 DETECTING A CAR USING A
3D MODEL WITH CONTEXT
The aim of this section is to describe the operations
performed in order to localize a specific car model,
see Fig. 1. A description of the different setup and
processing units for the solution will follow. The cam-
era calibration will be addressed in 2.1, the search
space in 2.2, the forgound/background segmentation
in 2.3, the 3D model search in 2.4 and 2.5, and finally
the non-maximum suppression in 2.6.
2.1 Camera Calibration
In order to get a camera calibration from an inter-
section used in the experiments, manually selected
points had their 3D positions measured with a Leica
GX1230 GG. These points were also manually po-
sitioned in an image from a static mounted camera,
placed high up in a water tower, and the correspond-
ing points were used for calibration, see Fig. 2. Cal-
ibration was performed using Tsai calibration (Tsai,
1987). The final camera parameters, are then used for
mappings between the image frame and the world co-
ordinate system.
2.2 Search Space - Sampled Ground
Plane and Rotations
The space used to search for a specific 3D model is
here chosen as a rectangle in the ground-plane z = 0
419
Nilsson M. and Ardö H..
In Search of a Car - Utilizing a 3D Model with Context for Object Detection.
DOI: 10.5220/0004685304190424
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 419-424
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
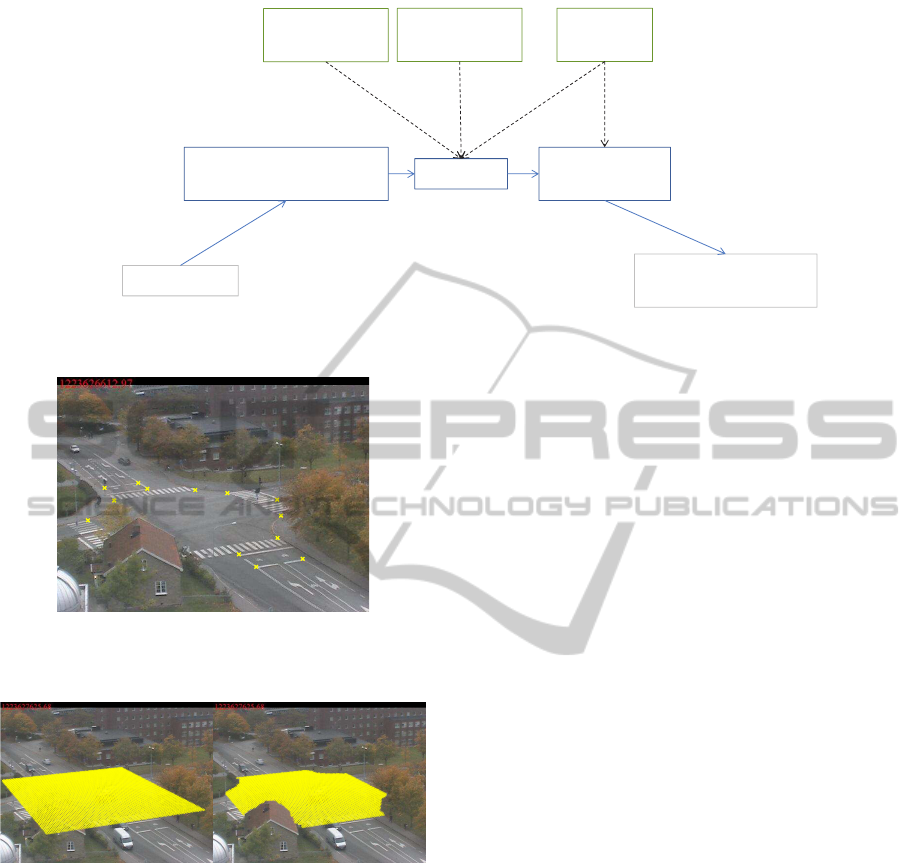
Camera
Calibration
Define
Search Space
Foreground/Background
Segmentation
Setup
Processing
3DSearch
3DModel
NonͲMaximum
Supression
Detection Rectangles
inGround Plane
ImageFrame
Figure 1: Overview of proposed solution.
Figure 2: Calibration points used in image. These positions
were measured in the world coordinate system using a high
precision GPS.
Figure 3: Ground plane with positions for the dense grid
(left) and the masked position for the current view (right).
with around ten centimeters steps in each direction.
Further, a mask is manually created to remove posi-
tions outside the road as well as those that are covered
by buildings in the viewpoint, see Fig. 3. At each po-
sition, the angle for the object is further explored, here
at 22.5 degree steps. Thus, in principle this can be
viewed as an occupancy map (Khan and Shah, 2006).
By using a max operator for scores found at all angles
at each position a visualization similar to occupancy
maps can be produced.
2.3 Foreground/Background
Segmentation
As input a probabilistic background/foreground seg-
mentation algorithm was used (Ard¨o and Sv¨ard,
2014). It produces an image that in each pixel stores
the probability that this pixel currently shows a mov-
ing object as opposed to the static background. To
make it robust to lighting variations and shadows, it
does not utilize the image intensities directly. Instead
it preprocesses the input frame by calculating the gra-
dient direction in each pixel, and then the segmenta-
tion is based on those preprocessed input frames in-
stead.
Gradient directions is a good feature when the gra-
dient magnitudes are high, but can be very noisy when
the magnitudes are low. This means that some gra-
dient orientations are matched with more confidence
than others. This uncertainty is estimated, which
means that more weight can be put on the confident
matches than those with higher uncertainty. This is
achieved by using the probability distribution of gra-
dient orientations parameterized by a signal to noise
ratio defined as the gradient magnitude divided by the
standard deviation of the noise. The noise level is rea-
sonably invariant over time, while the magnitude has
to be measured for every frame. Using this proba-
bility distribution the segmentation can be posed as
a Bayesian classification problem with two classes,
background and foreground. The classification yields
a probability for each pixel that represents how likely
it is that it belongs to each of the classes.
The gradient directions of the current input frame
are compared with a background model that is con-
structed and updated online using recursive quantile
estimation (Ard¨o and
˚
Astr¨om, 2009). That model
consists of two parts: i. A background image esti-
mated as the median of the latest observed gradient
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
420
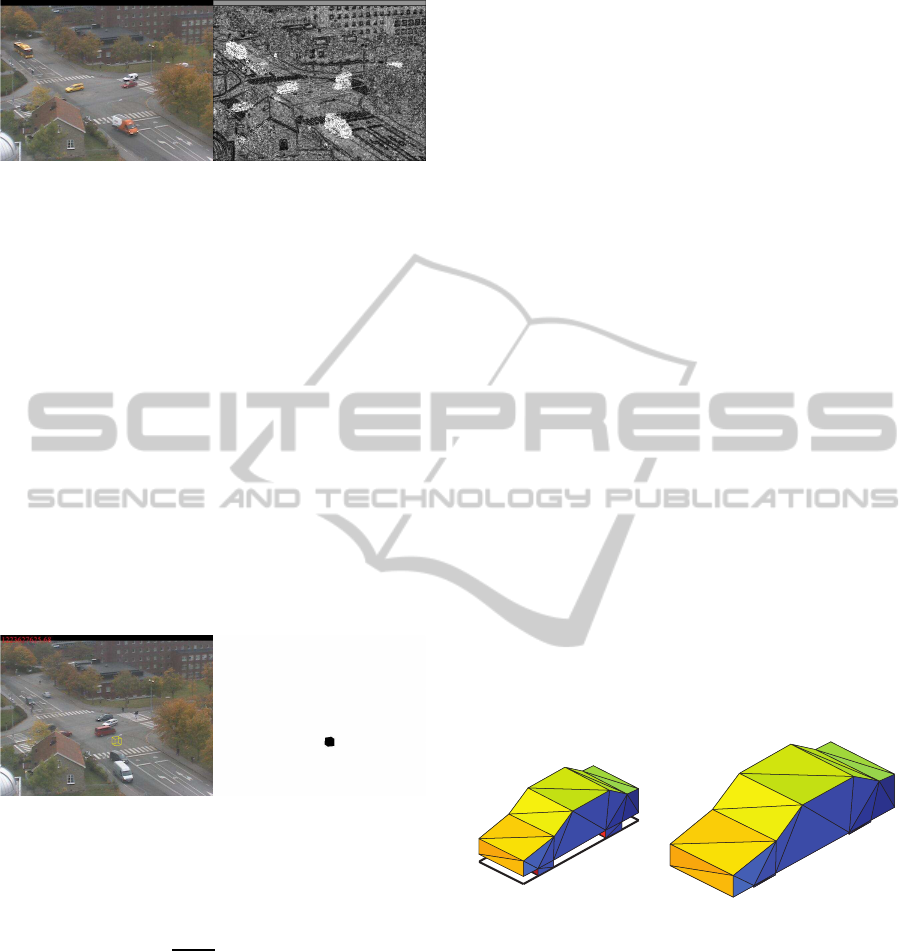
Figure 4: Image frame (left) and the foregound/background
segmentation used (right).
directions ii. A noise level image estimated from the
25%- and 75%-quantiles of the latest observed gradi-
ent directions. An example of the segmentation can
be found in Fig. 4.
2.4 Fast Box Search for Rapid Rejection
Note that the sampled space in the scenario described
above results in 8000+ positions with angles to check
with the 3D model. In order to speed up this pro-
cess, a simpler box of size 1.5× 1.5 × 1.5 meters is
used initially and with steps of one meter instead of
10 centimeters and with no rotation applied. This box
is defined by 12 triangles. Mapping the triangles from
world to image and rasterizing them produces a set of
pixels B
x,y
for a given position (x, y) in meters from
the ground plane, see Fig. 5.
Figure 5: A 3D box model shown as a yellow wire frame
in the image (left) and the corresponding rasterized pixels
creating a set of pixels B
x,y
indicated in black (right).
From the set of pixels B
x,y
a box score can be
found as
b
x,y
=
1
|B
x,y
|
∑
k∈B
x,y
P(k). (1)
where P(k) is the probabilistic segmentation for a
pixel k = [i j]
T
. A threshold, θ
box
, on this box
score is then applied in order to see if a more de-
tailed search for the 3D model with rotation should
take place around the point checked. Thus, a grid
search is applied in the search space. In a way, this
can be viewed as a 3D search variant of a sliding win-
dow cascade commonly used for object detection in
images to quickly reject uninteresting patches (Viola
and Jones, 2001; Doll´ar et al., 2012).
2.5 3D Model of the Car and Context
The 3D model used is that of a Toyota Corolla, a
sedan car. This car was used in the experiments and
also equipped with GPS sensors, which will be ex-
ploited as ground truth in the experiments. This car
was manually measured with a foot ruler and a 3D
model was created using a triangle mesh with 60 tri-
angles, see Fig. 6. Note that the chosen model is more
sophisticated than a box model (Carr et al., 2012)
but not detailed in comparison to 10000+ triangles
meshes not uncommonly used in the gaming indus-
try. The reason for this model trade off is to strike a
balance between processing speed and performance.
Given a correct model for the sought object, a more
sophisticated model than a box will improve the local-
ization accuracy. However, an overly detailed model,
for example considering adding wing mirrors, will be
a bottleneck performance-wise and not add any sig-
nificant amount to localization accuracy. This since
the automatic foregound/background segmentation is
noisy in practice. Furthermore, even with a close to
perfect segmenter, the pixel resolution required to ex-
tract some details, is not available with the current
camera used.
In order to produce some context around the car,
a mid point for the 3D car model is found (middle of
rectangle in x, y and z at the half height of the car)
and then scaling the points with a factor f
context
> 1
produces a car larger than the original. Additionally,
any scaled point getting a negative z value, i.e. below
the ground plane, is set to zero, see Fig. 6.
Figure 6: 3D model of a Toyota Corolla using 60 triangles
and its rectangle footprint (left) and the enlarged 3D model
(right) used to capture context.
Similar to the box described earlier, given a po-
sition (x, y) in meters from the ground plane and an
angle a in degrees, both the car model and the en-
larged car model are placed and rotated. First, the
enlarged model is transformed from world to image
coordinates and rasterized. Second, the original car
model undergoes the same process. Thus, in the im-
age, two sets of pixels are formed, the object set O
x,y,a
and enlarged object set E
x,y,a
. From these two sets the
context set C
x,y,a
is formed as the difference
C
x,y,a
= E
x,y,a
\ O
x,y,a
. (2)
InSearchofaCar-Utilizinga3DModelwithContextforObjectDetection
421

An example of the object and context set are shown
in Fig. 7. An object score, o
x,y,a
, for a given position
and rotation is found as
o
x,y,a
=
1
|O
x,y,a
|
∑
k∈O
x,y,a
P(k) −
α
context
|C
x,y,a
|
∑
k∈C
x,y,a
P(k)
(3)
where α
context
is a variable used to strike a balance
between object and its context. In order to produce a
detection, in form of a rotated rectangle in the ground
plane, a threshold, θ
object
, on o
x,y,a
is employed.
Figure 7: 3D car model as yellow wire frame in image (left)
and the corresponding rasterized pixels creating a set of ob-
ject pixels O
x,y,a
indicated in black and context pixels C
x,y,a
in gray (right).
The importance of context is to aid the decision
from other objects in the scene. For example, con-
sider the case when a bus, truck or a larger than a car
vehicle is present. Not utilizing context would imply
that the highest score possible might be when extract-
ing a score within this larger object and creating sev-
eral detections within it with the car model. Thus, the
context where pixels should be close to zero will aid
this case and produce a lower score.
2.6 Non-maximum Suppression on
Rotated Rectangles in the Ground
Plane
Output from the search of the specific object is ro-
tated rectangles in the ground plane. Typically multi-
ple overlapping detections for each instance of a car.
The Non-Maximum Suppression (NMS) method em-
ployed here is similar to the non-rotated boundingbox
suppression (Felzenszwalb et al., 2010), but here rota-
tions have to be considered also. Detections are sorted
according to their score and are greedily removed if
the bounding boxes are more than 0% covered. That
is, no cars are allowed to overlap in the final output,
by a bounding box of a previously selected detection.
The overlap check for the rotated boxes can be per-
formed using a general polygon clipper or the sepa-
rating axis theorem. An example of the outputs (red)
from applying threshold θ
object
to the object score
in Eq. 3, and the corresponding result (yellow) after
NMS, can be found in Fig. 8.
Figure 8: Non-Maxmimum Supression (NMS) of rotated
rectangles in orto-view. Red rectangles are detections from
the 3D model search and yellow rectangles are the result
after NMS.
3 EXPERIMENTS
The setup used has been explained throughout Sec-
tion 2. Briefly, the 13 3D points measured at the in-
tersection as well as manually positioned in the im-
age, see Fig. 2, were used to calibrate the camera.
The search space was defined and occluded areas re-
moved, see Fig. 3. Foreground/background segmen-
tation was perform on frames of video from the cam-
era. The 3D box and car model was used and de-
tections passing thresholds θ
box
and θ
object
undergoes
non-maximum suppression of rotated rectangles in
the ground plane. The parameters used in the experi-
ments can be found in Table 1.
Table 1: Default values used in experiments.
Parameter Value
θ
box
0.45
θ
object
0.2
α
context
1
In order to evaluate a specific detection within the
scene, the car used was equipped with two GPS sen-
sors. The sensors were placed in the front and at the
back of the car. Given these positions, it is possible to
sync the GPS to the camera in time and to find an ex-
pected rectangle footprint in the ground plane at every
frame. An example from a single frame can be found
in Fig. 9.
A video sequence with mixed traffic and with the
GPS-equipped car performing a left turn was investi-
gated. During this turn, the middle position of some
rectangle detected by the proposed system managed
to be located inside the GPS rectangle 91.4% of the
time, a decent result considering monocular view and
the complexity of the mixed traffic. Furthermore,
the mean difference between the middle points of the
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
422
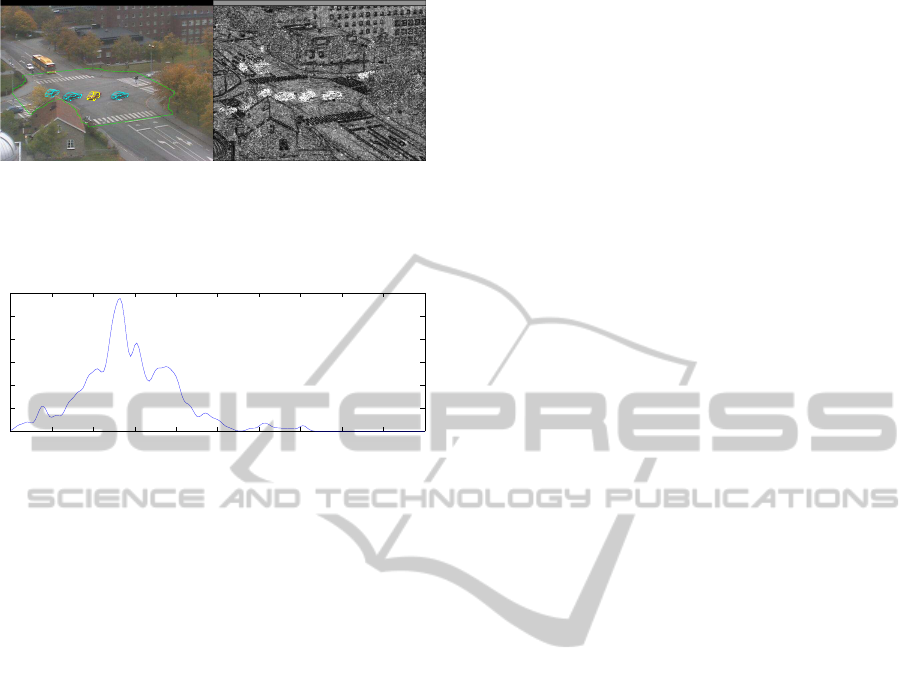
Figure 9: Examples of detections (cyan) and the detection
that match to GPS position of the car (yellow) and the corre-
sponding foreground background segmentation (right). The
green border indicates the area in which the search takes
place.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
1
2
3
4
5
6
x, distance error [m]
f(x), estimated pdf [%]
Figure 10: Parzen estimate (h = 0.02) of density for euclid-
ian distances between middle of rectangles from detection
and GPS.
rectangles (detected and GPS), in the cases where it
was considered to be detected, was around 0.5m. A
Parzen window estimated density (Parzen, 1962) for
this distance can be found in Fig. 10.
4 CONCLUSIONS
A system searching for a specific 3D shape, a
car in this case, has been presented. The pro-
posed methodology utilizes camera calibration, a de-
fined search space in the ground-plane, and fore-
ground/background segmentation. Given this, the 3D
object, with additional context, is proposed to be uti-
lized in order to find a score for detection. Further,
a non-maximum suppression on rotated rectangles in
the ground plane is conducted to yield final detec-
tions. The system has been applied to real data with
mixed traffic. Ground truth for one car in this data
could be extracted by the use of a GPS. Experiments
on this real data indicate that the car could be de-
tected in 91.4% of the time it was visible and inside
the search area. Furthermore, detections matching the
ground-truth has an average error of 0.5m.
5 DISCUSSION AND FUTURE
WORK
While the results are promising, improvements to the
proposed framework to handle more complexity and
improvement of accuracy is here discussed. For
starters, currently only one model has been used, a
sedan car, this should be extended with more relevant
3D shapes (vans, trucks, pedestrians, bicyclists etc).
A straight forward way to perform this is to use the
system described up to the Non-Maximum Suppres-
sion (NMS) for serval 3D shapes and then perform
NMS for all objects.
Another extension is to place more cameras to bet-
ter handle occlusions. Different approaches could be
adopted here. One way could be to run the whole
system up to NMS for all views. This way a score
fusion could be adopted before NMS, possibly with
some weighting, to produce scores taking into ac-
count scores from all views.
The system propped here does not perform any
temporal processing. One possibility is to extend the
system with a following tracking and thus making
temporal assignments and smoothing. Given tracks to
an object, yet another extension could be to adjust a
detected 3D model further by optimizing the position,
the angle, and the 3D shape. For example, by allow-
ing the 3D points, which defines the shape, freedom
to move with some constraints.
REFERENCES
Ard¨o, H. and
˚
Astr¨om, K. (2009). Bayesian formulation
of image patch matching using cross-correlation. In
Third ACM/IEEE International Conference on Dis-
tributed Smart Cameras, pages 1–8.
Ard¨o, H. and Sv¨ard, L. (2014). Bayesian formulation of gra-
dient orientation matching. Submitted to CVPR 2014.
Carr, P., Sheikh, Y., and Matthews, I. (2012). Monocu-
lar object detection using 3d geometric primitives. In
Fitzgibbon, A., Lazebnik, S., Perona, P., Sato, Y., and
Schmid, C., editors, Computer Vision ECCV 2012,
volume 7572 of Lecture Notes in Computer Science,
pages 864–878. Springer Berlin Heidelberg.
Doll´ar, P., Appel, R., and Kienzle, W. (2012). Crosstalk
cascades for frame-rate pedestrian detection. In Pro-
ceedings of the 12th European conference on Com-
puter Vision - Volume Part II, ECCV’12, pages 645–
659, Berlin, Heidelberg. Springer-Verlag.
Felzenszwalb, P., Girshick, R., McAllester, D., and Ra-
manan, D. (2010). Object detection with discrim-
inatively trained part-based models. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
32(9):1627–1645.
Ferryman, J., Worrall, A., Sullivan, G., and Baker, K.
(1997). Visual surveillance using deformable mod-
els of vehicles. Robotics and Autonomous Systems,
19(34):315 – 335.
Khan, S. M. and Shah, M. (2006). A multiview approach
to tracking people in crowded scenes using a planar
InSearchofaCar-Utilizinga3DModelwithContextforObjectDetection
423

homography constraint. In In European Conference
on Computer Vision.
Koller, D., Danilidis, K., and Nagel, H.-H. (1993). Model-
based object tracking in monocular image sequences
of road traffic scenes. Int. J. Comput. Vision,
10(3):257–281.
Li, Y., Gu, L., and Kanade, T. (2009). A robust shape
model for multi-view car alignment. In The IEEE In-
ternational Conference on Computer Vision and Pat-
tern Recognition.
Nilsson, M., Ard¨o, H., Laureshyn, A., and Persson, A.
(2013). Reduced search space for rapid bicycle detec-
tion. In International Conference on Pattern Recogni-
tion Applications and Methods (ICPRAM).
Parzen, E. (1962). On estimation of a probability den-
sity function and mode. The Annals of Mathematical
Statistics, 33(3):pp. 1065–1076.
Pepik, B., Stark, M., Gehler, P., and Schiele, B. (2012).
Teaching 3d geometry to deformable part models. In
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR) 2012, Providence, RI, USA. ac-
cepted as oral.
Song, X. and Nevatia, R. (2007). Detection and tracking
of moving vehicles in crowded scenes. In Motion and
Video Computing, 2007. WMVC ’07. IEEE Workshop
on, pages 4–4.
Tan, T. N., Sullivan, G. D., and Baker, K. D. (1998). Model-
based localisation and recognition of road vehicles.
Int. J. Comput. Vision, 27(1):5–25.
Tsai, R. (1987). A versatile camera calibration technique
for high-accuracy 3d machine vision metrology using
off-the-shelf tv cameras and lenses. Robotics and Au-
tomation, IEEE Journal of, 3(4):323–344.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In In Proceed-
ings of the 2001 IEEE Computer Society Conference
on Computer Vision and Pattern Recognition (CVPR),
volume 1, pages 511–518.
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
424
