
Matching Spatial Ontologies
A Challenge of Formalization
Sana Châabane and Faïez Gargouri
MIRACL laboratory,University of Sfax- Tunisia, Route de Tunis km 10, Cité El Ons Sfax 3021, Tunisia
Key
words: Ontology Matching, Spatial Ontology, Merging, Mapping, Semantic Matching, Topologic Matching,
Geometric Matching.
Abstract: Ontology matching can be defined as the process of defining a set of functions for specifying
correspondences between candidate concepts in order to discover similarities between two ontologies; it can
be processed by exploiting a number of different techniques. In this paper, we present an approach of
merging spatial ontologies which consists of three processes: “matching process”, “mapping process” and
“merging process” and we focus on the matching process. Indeed we consider three kind of matching:
semantic matching, topologic matching and geometric matching. For each type of matching, we formally
define functions for specifying correspondences between candidate concepts.
1 INTRODUCTION
The problem of heterogeneity has been addressed in
different research communities, particularly in the
context of databases cooperation (Bin et al., 2003)
and (Giunchiglia and Shvaiko, 2003) but also in
order to share correctly and efficiently all the
knowledge contained in different ontologies (Noy
and Musen, 2000). Different processes are used to
share the knowledge contained in several ontologies:
integration, merging, alignment. These processes
differ depending on the desired results, available
information, the level of integration, etc.
Ontology matching takes an important role in the
process of ontology integration and merging with the
purpose of establishing semantic relationships
between two ontologies. In general, ontology
matching can be defined as the process of
discovering similarities between two ontologies
(Predoiu et al., 2006). It determines the relations
holding two sets of entities that belong to two
discrete ontologies (Ehrig and Sure, 2004). In other
words, it is the process of finding a corresponding
entity in the second ontology for each entity (for
example, concept, relation, attribute) in the first
ontology that has the same or the closest intended
meaning. This can be achieved by analyzing the
similarity of the entities in the compared ontologies
in accordance with a particular metric (Ehrig and
Sure, 2004) and (Interop, 2004).
We are interested in our work, in merging spatial
ontologies. Merging creates a single coherent
ontology; different ontologies about the same
domain are merged into one that "unifies" all (Noy
and Klein, 2003). Indeed, spatial information,
diverse in nature, is a specific case of heterogeneity,
because of the multitude of data handled sources. A
spatial object is an object modeling a real world
phenomenon, particularly in describing one or more
locations on the globe surface. A spatial object is
described by semantic data (its name, its nature, its
appearance, its various characteristics ...) and by
geometric data (its position on the surface). We
consider that a spatial ontology consist of spatial
concepts, semantic relations and spatial relations
(Sana et al., 2013). Semantic relations are those
supported by UML (Xu et al., 2008; Andy et al.,
1998; Ruth et al., 1997; OMG, 1997) and
(Rumbaugh et al., 1998), that are: generalization,
aggregation, composite and simple association with
a name. Spatial relations are of three types: metric
relations classified into two types: Distance relations
that express a distance with a value and a unit of
measure, and approximate relations that express an
approximate distance between two spatial objects.
Considered approximate relations are: {in-side, near,
beside, nigh}. The second type of considered spatial
relations is directional relations that model the nine
cardinal positions of a spatial object and express the
position of a spatial object versus another.
355
Châabane S. and Gargouri F..
Matching Spatial Ontologies - A Challenge of Formalization.
DOI: 10.5220/0004623603550360
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2013), pages 355-360
ISBN: 978-989-8565-81-5
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Directional relations are defined throughout the
DIRECTION set: {North, South, East, West, North
East, North West, South East, South West} formally
presented in section four. Finally, topological
relations are those defined in (Clementini et al.,
1993).
Spatial ontologies have shown that respecting the
independence between the conceptual level and
external level, it is possible to provide different
views of ontology. The problem of heterogeneity of
spatial ontologies is more complex than that of other
domain ontologies, because it is necessary to take
into account the spatial aspects of concepts and
relations. This field of study is not yet well explored
by researchers, thing that incites us to propose an
approach of merging spatial ontologies. In this
paper, we focus on the matching process of this
approach.
This paper is organized as follows: second
section presents an overview on techniques of
matching ontologies. Third section details our
approach of merging spatial ontologies. In the
fourth section, we detail matching process by
presenting informal and formal definitions of
matching functions. We conclude this paper by
conclusion and future work we intend to achieve.
2 TECHNIQUES OF MATCHING
ONTOLOGIES
Many works has been developed in the field of
ontologies matching based on basic techniques of
specification of methods for calculating semantic
distances between concepts and tools that are more
complete and integrating these methods into their
processes of matching. To provide a common
conceptual basis, researchers have started to identify
different types of ontology matching techniques and
propose classifications to distinguish them. In (Abels
et al., 2005) a classification is defined that consists
of nine matching techniques based on existing
literature studies. Another classification of these
techniques of matching is proposed in (Euzenat and
Shvaiko, 2007). This classification is based on the
classification proposed by (Rahm and Bershtein,
2001) and considers other criteria for comparing
matching approaches. We detail in what follows,
matching techniques presented by (Euzenat and
Shvaiko, 2007).
2.1 Linguistic Techniques
These are all techniques used to evaluate the
similarity between two concepts based on their
names and names of their properties. The common
characteristic of linguistic techniques is to produce a
measure of similarity between two strings. These
results can be obtained by syntactic, lexical and
semantic techniques. The three types of linguistic
techniques may be used in combination.
2.2 Contextual Techniques
These techniques are based on the fact that the
meaning of a concept is strongly linked to context.
Indeed, they are taken to assess the similarity
between concepts by analyzing their contexts. The
context is represented by different structures
describing concepts such as properties of the concept
or semantic relations between concepts of the
ontology. There are many different techniques for
the assessment of contextual similarity, there are
those that are based on heuristics metrics and those
based on probabilistic reasoning.
2.3 Combined Techniques
Tools for identifying matches are not based on a
single technique but rather on a combination of
different techniques in order to obtain a
comprehensive measure of similarity. Once this
measure is defined, it must devise a mechanism to
eliminate results deemed irrelevant.
2.4 Extensional Techniques
These techniques are based on the analysis of
ontology instances with statistical methods, and
probabilistic learning.
2.5 Techniques based on Neighborhood
Structures of Concepts
Concepts comparison may be realized on the
concept’s name itself and its neighbors in the
ontology with inheritance hierarchies or
relationships of concepts (domains of departure or
arrival, multiplicity, etc…).
These techniques are relevant to domain
ontologies; namely spatial ontologies which have
specific characteristics related to the spatial aspect of
concepts and spatial relations. We must therefore,
take into account these characteristics in the merging
process of spatial ontologies.
In the next section, we present our approach of
merging spatial ontologies.
KEOD2013-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
356
3 APPROACH OF MERGING
SPATIAL ONTOLOGIES
The proposed approach takes as input two spatial
ontologies called candidate ontologies, and provide
as a result a single ontology called global ontology.
It consists of three phases. The first phase is to apply
a matching process between candidate ontologies.
“Matching” is the process of defining a set of
functions for specifying correspondences between
candidate concepts (Shvaiko and Euzenat, 2008). A
matching function is a binary relation between two
spatial concepts. The second phase is “mapping”
which consist to find correspondences between
candidate concepts referring to the matching
functions definitions. The third phase is “merging”
which consist to build the resulting ontology based
on merging rules which is spatially and semantically
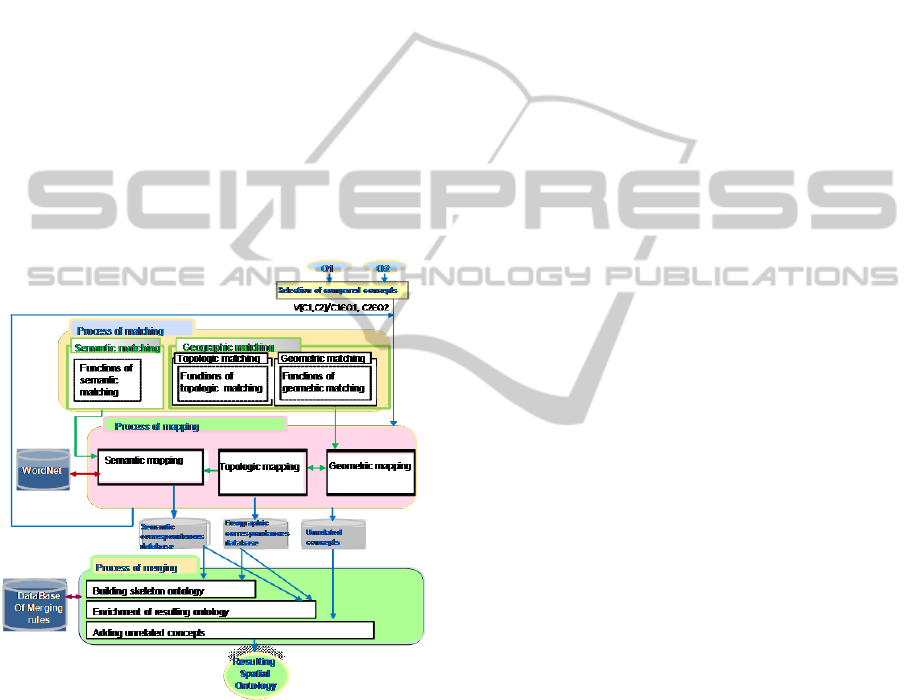
richer. “Figure 1” presents our approach of merging
spatial ontologies.
Figure 1: Approach of merging spatial ontologies.
In this paper, we focus on the matching process. The
following section presents in detail the various steps
of the matching process.
4 THE PROCESS OF MATCHING
The first phase of our approach is the matching
process. This process is to define relations of
correspondence between spatial concepts
representing the same real-world phenomena, but
from two different data sets. This process involves a
large number of techniques and parameters that
depend heavily on the modeling of geographic
information and also involves semantic aspects. We
propose three types of matching:
The “semantic matching” is to match concepts
using their semantic characteristics. The
“topological matching” uses topological relations
between concepts for matching. Finally, the
“geometric matching” consists to match concepts
using their geographical characteristics, including
their location and their graphic shapes.
These three types of matching can be used
separately or in addition to one another. In what
follows, we define the matching functions adopted
by our approach. For each matching function, an
informal definition and a formal definition are given.
To formally define the matching functions, we must
first introduce the components of a spatial ontology
(Sana et al., 2013). Indeed, we consider a spatial
ontology consists of spatial concepts and semantic
and spatial relations. A spatial concept is
characterized by its name of string, its location and
its graphic shape. We define the graphical shapes of
a spatial concept as Point, Line or Polygon. A Point
is characterized by an x and y coordinates of integer.
A Line is characterized by the properties ds: start of
section and fs: end of section of Point, a height of
integer and a direction. A Polygon is characterized at
least three extremities of Point: e1, e2 and e3.
To formally write matching functions, we take the
following parameters:
C1, C2, C3: spatial concepts.
P1, P2: two spatial concepts of Point graphic shape;
G1, G2: two spatial concepts of Polygon graphic
shape;
L1, L2: two spatial concepts of Line graphic shape;
T1, T2, T3: terms of strings.
A(C1): The set of C1 attributes (set of strings).
A(C2): The set of C2 attributes (set of strings).
A(C3): The set of C3 attributes (set of strings).
4.1 The Semantic Matching
The semantic matching aims to express more
semantics of concepts and to show semantic links
between concepts of candidate ontologies; thereafter
semantically enrich the resulting ontology. In our
approach, semantic matching is based on the
calculation of similarities between candidate
concepts. In fact, we adopted a combinatorial
technique for similarity evaluation between two
concepts based on their names and properties. A
combinatorial technique means that it is a
MatchingSpatialOntologies-AChallengeofFormalization
357

combination of a syntactic technique which is “edit
distance “ed” (Levenshtein, 1996) which represents
the minimum insertion, deletion or substitution
required to transform one string T1 into another T2;
a lexical technique defined by (Maedche and Staab,
2002) and a semantic technique using an external
resource (Miller, 1995) which is the knowledge base
“Wordnet”. After a detailed study on the nature of
concepts of spatial ontologies, we define the
following functions of semantic matching using
description logic.
Rule 1 : The semantic-Identity relation is written
Idsem(C1, C2) is satisfied between two spatial
concepts C1 and C2 if and only if C1 name is
syntactically equal to C2 name and the set of
attributes of C1is equal to the set of attributes of C2.
Idsem( ) function is defined formally as follows:
∶
1,2
1∈1∧2∈2
∧
1.,2.
1
,
2
(1)
The function Idsem( ) is symmetric and transitive.
To define the Idsem( ) function, we define the
functions synt( ) and Eens( ) whose definitions are
given below:
Rule 2: The syntactic-equality relation written
synt(T1, T2) is satisfied between two terms T1 and
T2 if and only if the edit distance “ed” between the
two terms is equal to zero. Then, we write:
1,2
1
1,2
0
01,20
(2)
The function synt( ) is symmetric and transitive.
Rule 3: The Equality-sets relation written
Eens(A(C1),A(C2)) is satisfied between two sets of
terms if and only if for any term T1 belonging to the
first set there exists a term T2 belonging to the
second set where synt(T1,T2)=1, and vice versa.
Then, we write:
∶
1
,
2
⁄
∀1∈
1
∃
2∈
2
1,2
1
⁄
∧
∀2∈
2
∃
1∈
1
2,1
1
⁄
(3)
The function Eens(A1, A2 ) is symmetric and
transitive.
Rule 4: The Equivalence relation written Eq(C1,
C2) is satisfied between two concepts C1 and C2 if
and only if the name of C1 is semantically or
linguistically equal to C2 name and all the attributes
of C1 admit linguistic inclusion or synonymic
inclusion in the set of C2 attributes. Then, we write:
∶
1,2
|1∈1∧2∈2∧
1.,2.
1
∨
1.,2.
1
∧
1
,
2
∨
2
,
1
∨
1
,
2
∨
2
,
1
(4)
The function Eq( ) is symmetric and transitive.
To define Eq( ) function, we define the functions:
Incsyn(), Incling( ), synonyme( ) and ling( ) whose
formal definitions are the following:
The Synonymy relation written synonyme(t1,t2) is
satisfied between two strings if and only if the
terminological resource "Wordnet" generates a
synonymy relation between t1 and t2.
The function synonyme( ) is symmetric and
transitive.
Rule 5: The Synonymic-Inclusion relation written
Incsyn(A(C1),A(C2)) is satisfied between two sets
of strings if and only if every element of E1 belongs
to E2 itself or its synonym.
∶
1,2|∀1∈
1
,∃2∈2
⁄
1,2
1∨
1,2
1
(5)
The function Incsyn(A(C1), A(C2)) isn’t symmetric
but is transitive.
Rule 6: The linguistic-equality relation written
ling(t1, t2) is satisfied between two terms if and only
if the lexical technique SM (T1, T2) ≥ 60%. “SM”
technique (String Matching) (Maedche and Staab,
2002) uses the Levenshtein edit distance for the
similarity calculation; it takes as input two lexical
entries and returns a similarity degree between 0 and
1, where 1 means perfect similarity and 0 otherwise.
We set a threshold of similarity: s = 60%.
∶1,2
1
1,2
60%
0si
1,2
60%
(6)
The function ling( ) is symmetric and not transitive.
Rule 7 : Linguistic-Inclusion relation written
Incling(A(C1),A(C2)) is satisfied between two sets
of strings if and only if every element of A(C1)
belongs, itself or its linguistic equivalent, to A(C2).
Then, we write:
∶
1
,2|∀1∈
1
,∃2∈2
1,2
1
⁄
∨
1,2
1
(7)
KEOD2013-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
358

The function Incling( ) isn’t symmetric but is
transitive:
4.2 The Topologic Matching
This type of matching is using topological relations
to match concepts; such matching is using to
spatially enrich the resulting ontology.
Rule 8:
,1
∧
1,2
⟹,2
(8)
Rule 9:
,
∧
,
∧∩
⇒
,
(9)
Rule 10:
,1
∧
1,2
⇒,2
(10)
Rule 11:
1,2∧,∧1
∩2
⇒,1
∧,2
(11)
Rule12:
,
∧
,
∧∩
⇒,
(12)
Rule 13:
,∧,
⟹,
(13)
Rule 14:
,1∧1,2
⇒,2
(14)
Rule 15:
1,2∧1,∧1
∩2
⟹,
(15)
Rule 16:
1,1
∧∈
1.,2.
⇒1,1
(16)
Rule 17:
E
xtremityP1,L1
⇒InclusionP1,L1
(17)
Rule 18:
1,2
∧
1,2
∧1∩21
⇒2,1
(18)
Rule 19:
1,2
∧
1,1
∧1
∩21
⇒1,2
(19)
4.3 The Geometric Matching
The geometric matching uses graphic shapes of
concepts and their locations for matching.
Rule 20: The Spatial-Identity relation written
Idspa(C1,C2) is satisfied between two spatial
concepts C1 and C2, if and only if they have the
same graphic shapes and the same locations. Then,
we write:
∶
1,2
1∈1,2∈2∧
C1.FGpoint∧
C2.FGpoint∧
C1.XC2.X
∧
C1.YC2.Y
∧
1.∧
2.∧
1.2.∧
1.2.
∧
1.∧
2.∧
∀1,2,3⊂1.,
∃
1,
2,
3
⊂
2.
(20)
The function Idspa( ) is symmetric and transitive.
Rule 21: The Identity relation written
Identity(C1,C2), is satisfied between two spatial
concepts C1 and C2 if and only if they admit
Idsem(C1,C2) and Idspa(C1,C2) relations between
them. Then, we write:
∶
C1,C2|1∈1,2∈2∧
1,2∧1,2
(21)
The function Identity( ) is symmetric and transitive.
5 CONCLUSIONS
In this paper we defined the process of matching
ontologies and we presented a survey of matching
techniques. Then, we presented our approach of
merging spatial ontologies which consists of three
processes: “matching process”, “mapping process”
and “merging process”. We focused on the
“matching process” and presented formal definitions
of matching functions. These functions serve as
MatchingSpatialOntologies-AChallengeofFormalization
359

input to the mapping process in order to infer
relations between concepts of candidate ontologies.
In future work, we intend to define algorithms of
mapping process and rules of merging process. In a
second step, we intend to build an automatic tool for
merging spatial ontologies.
REFERENCES
A. Maedche, Steffen Staab., 2002. “Measuring Similarity
between Ontologies”, Proceedings of the European
Conference on Knowledge Acquisition and
Management (EKAW).
Abels, S., Haak, L., Hahn, A., 2005. “Identification of
Common Methods Used for Ontology Integration
Tasks”. In: 1stInternational ACM Workshop on
Interoperability of Heterogeneous Information
Systems (IHIS), pp. 75-78. Bremen, Germany.
Andy Evans, Robert France, Kevin Lano, Bernhard
Rumpe, 1998. “Developing the UML as a formal
modelling notation”. In Pierre-Alain Muller and Jean
Bezivin, editors, Proceedings of UML’98
International Workshop, Mulhouse, France, pages
297–307.
Bin HE, Kevin Chen-Chuan CHANG, Jiawei HAN, 2003.
“Automatic Complex Schema Matching across Web
Query Interfaces: A Correlation Mining Approach”.
Technical Report UIUCDCS-R-2003-2388,
Department of Computer Science.
Eliseo Clementini, Paolino Di Felice, Peter van Oosterom,
1993. “A Small Set of Formal Topological
Relationships Suitable for End_User Interaction”. In
proceedings of the Third International Symposium on
Advances in Spatial Databases: SSD'93, Pages 277-
295.
Ehrig, M., Sure, Y., 2004. “Ontology Mapping – An
Integrated Approach”. In: Bussler, C., Davies, J.,
Fensel, D., Studer, R. (eds.) ESWS 2004. LNCS, vol.
3053, pp. 76-91. Springer, Berlin/Heidelberg
Euzenat, J. and Shvaiko P., 2007. “Ontology matching
techniques”. In ontology Matching, springer verlag,
pp 61-149.
G. A. Miller., 1995. “WordNet: A lexical database for
english”. Communications of the ACM (CACM),
38(11):39–41.
Giunchiglia F. and P. Shvaiko., 2003. “Semantic
matching”. Knowledge engineering review, 18(3).
Interop., 2004. “Ontology Interoperability”. State of the
Art Report (SOA), WP8ST3 Deliverable, IST-508011.
Levenshtein, I. V., 1996. “Binary codes capables of
corrections, deletions, insertions and reversals”.
Soviet Physics-Doklady, 10(8):707_710.
Noy N.F. and Klein M., 2003. “Ontology evolution: not
the same as schema evolution”. Knowledge and
Information Systems.
Noy N.F., Musen M.A., 2000. “PROMPT: Algorithm and
Tool for Automated Ontology Merging and
Alignment”. In proceeding of the 17th national
conference on artificial intelligence (AAAI 2000).
Object Management Group (OMG). “UML semantics,
version 1.1.”, September 1997.
Pavel Shvaiko, and Jerôme Euzenat, 2008. “Ten
Challenges for Ontology Matching”. In Proceedings of
The 7th International Conference on Ontologies,
DataBases, and Applications of Semantics
(ODBASE).
Predoiu, L., Feier, C., Scharffe, F., de Bruijn, J., Martin-
Recuerda, F., Manov, D., Ehrig, M., 2006. “State-of-
the-art Survey on Ontology Merging and Aligning
V2.” EU-IST Integrated Project (IP) IST-2003-506826
SEKT: Semantically Enabled Knowledge
Technologies, University of Innsbruck.
Rahm E. and Bershtein P., 2001. “A survey of approaches
to automatic schema matching”. VLDB journal, the
international journal on very large data bases.
Rumbaugh J., Ivar Jacobson, Grady Booch, 1998. “The
Unified Modeling Language”, Reference Manual.
Addison-Wesley.
Ruth Breu, Radu Grosu, Franz Huber, Bernhard Rumpe,
Wolfgang Schwerin, 1997. “Towards a precise
semantics for object-oriented modeling techniques”.
In Proceedings ECOOP’97 Workshop on Precise
Semantics for ObjectOriented Modeling Techniques,
pages 53–59.
Sana Châabane, Wassim Jaziri, Faïez Gargouri, 2013. “A
formal framework for modeling topological relations
of spatial ontologies”, The Second International
Conference on Intelligent Systems and Applications:
INTELLI 2013, Venice, Italy.
Wei Xu, Sisi Zlatanova, Arta Dilo, Peter van Oosterom,
2008. “Modelling emergency response processes:
Comparative study on OWL and UML”, Proceedings
of the Joint ISCRAM-CHINA and GI4DM Conference,
Harbin, China.
KEOD2013-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
360
