
Asynchronous Flooding Planner for Multi-Robot Navigation
Bernd Br¨uggemann, Michael Brunner and Dirk Schulz
Unmanned Systems, Fraunhofer FKIE, Fraunhoferstrasse 20, Wachtberg, Germany
Keywords:
Multi-Robot System, Cooperation, Planning, Graph Search.
Abstract:
Within the topic of coordinated navigation of multi-robot systems (MRS) the problem may occur that there is
a difference between where the robots are able to move to and where they are allowed to move. To deal with
such constraints we propose a roadmap approach where those two different kinds of information are merged.
So we encounter the problem of connecting several target positions with valid paths in a graph structure.
Therefore, an asynchronous, parallel search algorithm is developed to find a passable and allowed way to the
target positions. In addition to static planning we show that our search algorithm is able to deal with dynamic
graphs and, to some extend, unknown environments.
1 INTRODUCTION
In this paper we deal with coordinated navigation of
a group of robots. Our goal is to find a plan for a
multi-robot system (MRS) which leads the robots to
user-defined target positions without violating a given
spatial constraint.
To reach this goal we use roadmap techniques to
determine a collision free path for the robot system,
but with special extensions to regard necessary inter-
actions between the robots. One such interaction or,
more formally spoken, spatial constraint is the per-
manent maintenance of communication connections.
Other possible interactions or constraints include, for
example, keeping a line of sight or adhering to a max-
imum distance between neighbouring robots. Thus,
during navigation we have to consider two different
kinds of information: where the robots are able to
move to (obstacle avoidance) and where the robots
are allowed to move to (movement constraints). In
this work we merge these different kinds of informa-
tion in a roadmap-like approach and provide an algo-
rithm which finds a collision-free path and which, in
addition, enables the robots to cooperate. As this is a
rather simple problem in the case of only one starting
and one or two end positions, we will focus on the
problem of different robots having to reach different
goal positions. Hence, for all following considera-
tions we assume one starting point and several target
positions.
Taking several target positions, we will show that
the problem is related to the Steiner tree problem and,
therefore, is np-complete. Consequently, every rea-
sonable algorithm trying to minimize the length of the
path can only be a heuristic approach. We will present
such a heuristic path search algorithm which is capa-
ble of merging both types of information: where a
robot is able to move to and where it is allowed to
manoeuvre. Our method uses techniques from the
so-called MPR (multi-point relay) Flooding, which
has its origins in the network communication com-
munity, in order to minimize the number of nodes in
the solution. Thereby, we interpret each node in the
roadmap as an independent entity, i.e. an agent. This
enables the algorithm to perform a parallel search on
the whole environment. Additionally, due to special
characteristics of this approach, we are able to deal
with dynamic environments: if the roadmap changes
and a plan gets outdated, the algorithm successfully
handles that and re-establishes the multi-robot plan.
The remainder of the paper is organized as fol-
lows: in section 2 we present some relevant work
on coordinated navigation in multi-robot systems and
give a short introduction to the MPR Flooding prob-
lem. Section 3 explains the basic data structures we
use for the roadmap approach. It provides details
about the information merging process and shows the
relation between our problem and the Steiner tree
problem. After that the proposed agent-based flood-
ing algorithm is described in subsections 3.2 and 3.3,
its behaviour on dynamic graphs is shown in chapter
4. Finally, a conclusion and a short outlook are given
in chapter 5.
222
Brüeggemann B., Brunner M. and Schulz D..
Asynchronous Flooding Planner for Multi-Robot Navigation.
DOI: 10.5220/0004457802220230
In Proceedings of the 10th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2013), pages 222-230
ISBN: 978-989-8565-71-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 RELATED WORK
Navigating a multi-robot system (MRS) with respect
to various spatial constraints is a well-known problem
in robotics. However, most papers deal with some
kind of communication constraint. This is, of course,
an important constraint for MRS because many coop-
erating tasks assume steady communication between
the robots. But a broader view on such spatial con-
straints is necessary to cover a larger field of possible
applications.
The planning problem addressed in this work has
some similarities with the multi-robot routing prob-
lem described in (Lagoudakis et al., 2005). There, the
problem of assigning the targets to the robots is ex-
amined, which is already the main difference between
both problems. While in the multi-robot routing prob-
lem the target positions have to be visited once, in our
case a robot has to reach a goal point and stay there till
the end of the plan. Mosteo et al. added the communi-
cation constraint to the multi-robot routing problem.
In (Mosteo et al., 2008) and (Mosteo et al., 2009) the
communication constraint is viewed as a local con-
straint between each robot. In their work the authors
use a reactive approach: whenever the signal strength
between two robots drops below a certain threshold,
the distance between them cannot be further extended.
The communication is modelled as a spring-damper
system, leading to the typical behaviour: if a robot
proceeds, it drags a line of robots along to ensure that
always relay robots are available for communication
with the control station. Such a reactive approach al-
ways holds the risk of suddenly losing communica-
tion, for example, if the leading robot vanishes behind
a massive obstacle.
Our algorithm was mainly inspired by the MPR
Flooding algorithm as proposed for ad-hoc network
protocolsin (Com, 1996). The aim of the MPR Flood-
ing is to identify a set of communication nodes which
covers the whole communication network. So, if all
MPR nodes repeat a message, each node receives that
message at least once. A greedy algorithm to obtain
such a set of nodes as well as some improvements are
described in (Qayyum et al., 2002). However, finding
an optimal set of MPR nodes is np-complete, as is the
general problem of an energy-efficient flooding of a
network (see (
ˇ
Cagalj et al., 2002)). Second, our ap-
proach is based on the idea of using agents for multi-
robot planning problems. Solutions for CSP (con-
straint satisfaction problem) and especially for the
distributed version, DisCSP, can be used, for exam-
ple, in multi-robot exploration as shown in (Monier
et al., 2010). Therefore, our algorithm shows some
similarity with the search algorithm shown for exam-
ple in (Zou and Choueiry, 2003). In contrast to such
algorithms, we model the spatial constraint in our al-
gorithm by the limited communication between the
agents.
In contrast to the mentioned solutions for the
multi-robot routing problem, here we present a plan-
ning algorithm which defines its actions before the
execution. Most coordination algorithms in literature
use a reactive approach to handle constraints and to
react if they might be violated. But doing so, the
class of addressable constraints is limited to contin-
uous constraints. If the connections created regard-
ing a non-continuous constraint are abruptly aborted,
a reactive method can hardly deal with that. Our ap-
proach, in contrast, offers the operator a global plan,
which obeys the constraint, and can, in the dynamic
case, react to changes in the environment.
3 AGENT-BASED FLOODING
SEARCH
3.1 Basics
As stated in the beginning, our basic goal is to find
a plan which leads a multi-robot system from a com-
mon start to several user-given target positions. Dur-
ing the execution of the plan, we have to obey a given
spatial constraint. So the problem can be formalized
as follows:
• Given:
– n robots and m target positions; n > m
– A spatial constraint C
• Search:
– A configuration of the MRS witch includes at
least all target positions and which fulfills the
constraint
– A path to this configuration which continuously
obeys the constraint
In this work we use a roadmap approach to rep-
resent where a robot is able to move to. The re-
sulting graph is called the movement graph G
mov
=
{V
mov
, E
mov
}. Its nodes V
mov
are evenly distributed
over the environment. Between two neighbouring
nodes there is an edge e
i
∈ E
mov
if there is no obstacle
in between and the slope is not too steep. We allow
horizontal, vertical and diagonal edges. The weight
of e
i
is equal to the Euclidean distance between the
nodes.
To coordinate the robots, we look at spatial in-
formation like the maintenance of communication or
up-keeping the line-of-sight. Those constraints can
be formulated as C(v
i
, v
j
) = {0, 1} with v
i
, v
j
∈ V
mov
.
AsynchronousFloodingPlannerforMulti-RobotNavigation
223

(a) (b) (c)
Figure 1: The basic SCG idea: possible movements are merged with the allowed area. This results in a list of valid movements
with respect to the position of a robot. (a) The movement graph is represented by the streets which a robot can traverse. (b)
The given spatial constraint (here, e.g. communication range) is valid within the coloured area. (c) Merging the possible
movements and the allowed area results in a choice of streets on which another robot may move without violating the given
constraint.
So it indicates if the constraint is fulfilled between
two nodes (C(v
i
, v
j
) = 1) or not (C(v
i
, v
j
) = 0). This
results in the constraint graph G
con
= {V
mov
, E
con
}
which consists of the same nodes as the movement
graph. Between two nodes v
i
, v
j
from V
mov
there is an
edge e
i
∈ E
con
if C(v
i
, v
j
) = 1. The weight of e
i
is 1.
At this point we have the information if a robot
is able to move to a certain position and the informa-
tion if it is allowed to move there. To find a way the
robot is able to follow, we have to find a way from the
starting node to the target node in G
mov
. But to judge
if a movement of a robot is allowed, we have to take
the positions of all robots into account. As long as all
robots are directly connected in the constraint graph,
the current robot configuration is allowed. All robot
positions represent one connected componentin G
con
.
Thus, before performing a step with a robot, one has
to test if there remains a connected component after-
wards.
Obviously, this leads to a large number of nec-
essary tests needed between G
mov
and G
con
. To re-
duce the number of tests we propose the Separated
Connection Graphs (SCG). Each SCG results from
a merging operation of G
mov
and G
con
at one node
v
i
. SCG(v
i
) = {V
SCG(v
i
)
, E
SCG(v
i
)
} consists of a set of
nodes V
SCG(v
i
)
which includes v
i
and each node which
is a direct neighbour to v
i
in G
con
. There is an edge
e ∈ E
SCG(v
i
)
between v
i
and v
s
∈ V
SCG(v
i
)
, if v
i
and
v
s
are within one connected component in the sub-
graph G
sub
= {V
SCG(v
i
)
, E
sub
⊆ E
mov
}. Thus, if one
robot stands at v
i
, SCG(v
i
) represents a look-up table
to which node another robot is allowed and able to
drive. The idea behind the SCGs can be seen in figure
1.
Using the SCGs it is possible to find a valid path
from a starting node v
s
to a target node v
t
. This path
can be described as a sequence of SCGs: SCG(v
s
),
SCG(v
i
), SCG(v
i+1
), . . ., SCG(v
t
). When travelling
along such a path, one robot has to be left at each
node v
i
, v
i+1
, . . . to satisfy the constraint. We call
these nodes relay nodes, as the robots on that nodes
are working as a sort of relay stations. Note that in
spite of the term ’relay node’ the actually used spatial
constraint can be freely chosen; it is not necessarily
communication range.
From such a path to a target node one can get an
idea how a complete plan for a multi-robot systems
looks like: a starting node, several additional relay
nodes and the different target nodes are connected by
paths which are allowed and traversable by the robots.
It is important to mention that such a plan does not
yet assign an executable path or a particular node to
any robot. In fact, the actual execution of such a pre-
computed path with a real multi-robot system requires
further considerations and is far beyond the scope of
this paper. The interested reader can find additional
information in (Br¨uggemann et al., 2012).
As we need a robot for each relay node, an obvi-
ous optimization is to minimize the number of relay
nodes. This raises the question how hard it is to find
an optimal plan for a set of target nodes. As already
mentioned, a relationship to the well-known Steiner
tree problem (see (Gilbert and Pollak, 1968)) can be
shown. To be more precise, finding a minimal distri-
bution of relay nodes which connects all target nodes
and the starting node is equivalent to the Steiner tree
problem:
Given a graph G = {V, E} and a set of terminals
T ⊆ V, a Steiner tree (sometimes also called minimal
Steiner tree) is a graph G
st
= {V
st
, E
st
} ⊆ G with T ⊆
V
st
and the weight of |E
st
| minimal. Exact solutions
for this problem are known to be np-complete.
Be V
t
i
the set of target nodes and v
s
the starting
node. We are searching for a minimal set of relay
nodes V
r
i
, such that the set of nodes V
t
i
∩ v
s
∩V
r
i
are
connected in G
con
. The edges in G
con
have a weight of
1, the number of nodes is equal to the number of edges
+1. Thus, we are searching for a set of nodes which
minimizes the total weight of the edges. With V
t
i
∩
v
s
= T this is equivalent to the Steiner tree problem.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
224

Consequently, every algorithm which provides a set
of relay robots or a plan in reasonable time can be
only heuristic.
Our Agent-Based Flooding Search is such a
heuristic approach. It is based on a flooding mech-
anism similar to the MPR flooding combined with
an agent-based search. Based on the definition for
G
mov
and G
con
, each node is taken as a separate entity
with an internal state consisting of the 3-tuple {active
| inactive, expanded | not expanded, priority}. Each
agent is initialised as {inactive, not expanded, ∞}.
Each agent is able to communicate with all other
agents in its neighbourhood. To gather plans which
respect the movement graph as well as the constraint
graph we define the neighbourhoodof an agent as fol-
lows: two agents a
i
and a
j
are neighbours if a
i
and
a
j
are connected in SCG(a
i
) as well as in SCG(a
j
).
An agent does not have to be active to communicate.
Communicating agents are able to mutually exchange
the following information resp. commands:
• An active agent can activate an inactive agent.
• An agent informs its neighbours that it is currently
expanding.
• An agent receives information about its direct
neighbourhood, including the internal state of
each neighbour.
• An agent receives the same information about
each neighbour’s neighbourhood.
With these basic foundations we are now able to
define an undirected flooding search algorithm. In the
first step, the expansion step, agents start to activate
other agents, resulting in an undirected search for pos-
sible connections to other activated agents. The next
section describes this step in detail. Since after the
end of the expansion step the resulting network of ac-
tivated agents contains far too many nodes, a further
optimization step is necessary. This step is then de-
scribed in section 3.3.
3.2 Expansion Step
The expansion step is similar to the MPR flooding al-
gorithm. First, those agents representing the starting
position and the end positions are activated and their
priority is set to zero. The expansion step lasts until
all activated agents build up one connected compo-
nent in the constraint graph.
Each active, not expanded agent a
i
constantly
checks if there is another active, not expanded agent
with a priority lower than its priority. If there is no
such agent, a
i
starts to expand with broadcasting a
currently expanding message to its neighbours. This
prevents other agents with the same priority from ex-
panding.
Now, the agent a
i
gets its 1-hop neighbourhood of
non-active agents. Let be H
1
this set of agents. Now
a
i
gathers the 1-hop neighbourhood of each agent in
H
1
. Let be H
2
those agents. We build H
2
in a way that
it will not contain any agents from H
1
. Now we search
for H
sub
1
⊆ H
1
so that those agents can communicate
with all agents in the set H
2
. All agents in H
sub
1
will
now get activated and receive a priority which is the
priority of a
i
+ 1.
Choosing the set H
sub
1
can be done by a modified
greedy strategy. First, we identify the set of agents
S
alone
in H
2
which can only be addressed by a single
agent in H
1
. Every agent in H
1
which reaches an agent
of S
alone
must be activated. Let those newly activated
agents be in the set S
single
. Now all agents addressed
by S
single
can be removed from H
2
and all activated
agents are removed from H
1
. Then we search for the
agent a
j
in H
1
which can reach the most agents in H
2
.
a
j
is activated and removed from H
1
. All agents con-
nected to a
j
in H
2
are also removed. This is repeated
until H
2
is empty.
During the expansion step a central component of
the algorithm continuously checks whether all acti-
vated agents build one connected component in G
con
.
We call this the breaking condition. As soon as this
condition becomes true for the first time, the expan-
sion step is stopped immediately and no agent is al-
lowed to expand any more. At this time, the network
of activated agents represents a valid solution to the
multi-robot path planning problem but includes many
unnecessary nodes. Thus, the Agent-Based Flooding
Search continueswith an additional optimisation step.
3.3 Optimisation Step
For the optimisation step we will deal with the graph
G
mpr
= {A
active
, E
active
} which is generated from the
active agents’ network. Let be A
active
all active agents
and E
active
all edges representing that two agents in
A
active
are neighbours. This graph G
mpr
is, generally
spoken, a valid plan for the multi-robot system, as it
connects the starting point with some relay points and
the target positions. Additionally, due to the definition
of the SCGs, the robots are able and allowed to pass
from one relay point to another. But normally G
mpr
contains too many relay positions, most of which are
unnecessary. To reduce the number of nodes the fol-
lowing optimisation step was implemented.
As it is known from the similarity to the Steiner
tree problem, a good solution will be a tree. There-
fore, we use a minimal spanning tree (MST) algo-
rithm on G
mpr
. In the resulting tree T
mpr
we can check
each leaf if it represents either the starting position or
a target position. If it is not, it represents a relay node.
AsynchronousFloodingPlannerforMulti-RobotNavigation
225
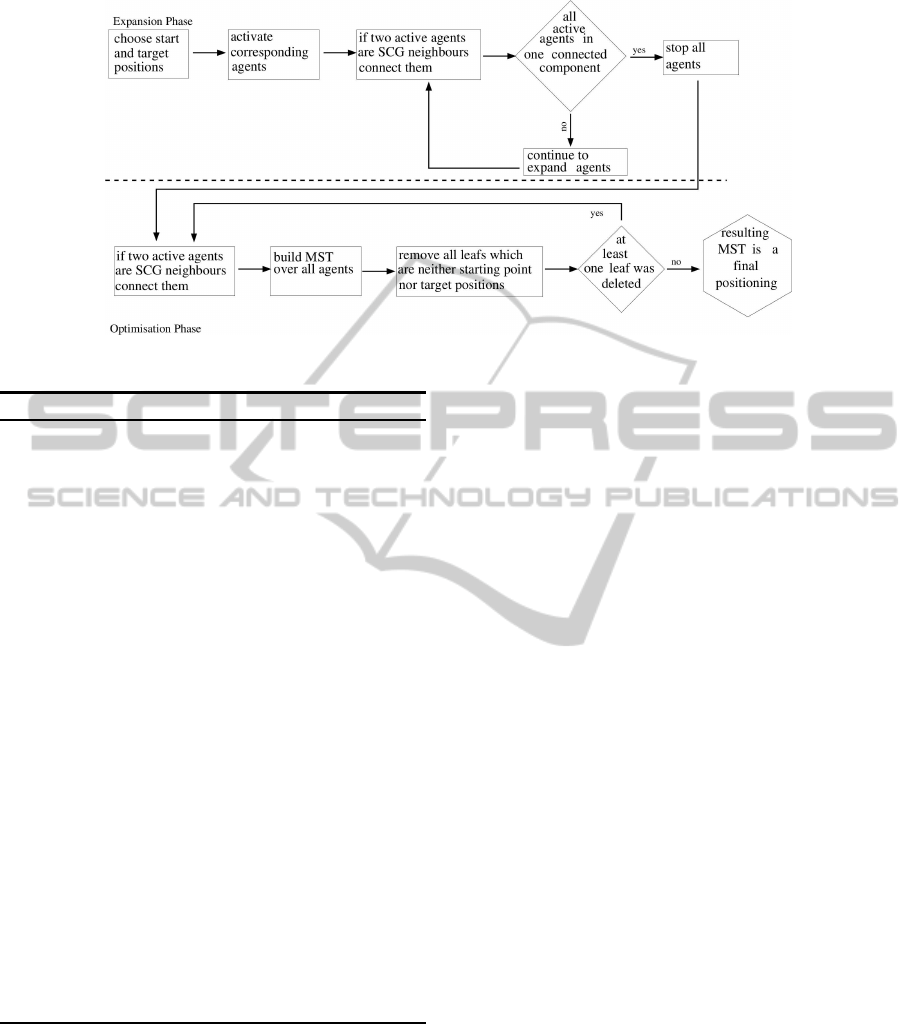
Figure 2: Flowchart of the Agent-based Flooding Search algorithm.
Algorithm 1: Agent-based flooding planner.
1: while all agents are not within one connected
component do
2: for Each active, not expanded agent do
3: while Neighbouring agent is expanding
do
4: WAIT
5: end while
6: Let be L
1
the set of agents in 1-hop neigh-
bourhood which are not active
7: Let be L
2
a list of all non-active agents in
2-hop neighbourhood which are not in L
1
8: while L
2
is not empty do
9: Activate agent c in L
1
which is con-
nected to the most agents in L
2
10: Remove all agents reach by c in L
2
11: Remove c from L
1
12: end while
13: Mark this agent as expanded
14: end for
15: end while
16: Let G
mpr
include all active agents and their edges
17: while at least one leaf is removed from G
mpr
do
18: Let be G
mst
= minimal spanning tree of G
mpr
19: Remove all leafs from G
mst
in G
mpr
which
represent no target positions
20: end while
However, as a leaf it is not necessary for the plan
and can be deleted. After this deletion the remain-
ing nodes are once again connected if the correspond-
ing agents are neighbours. With this smaller graph
the optimisation step is repeated as long as no further
unnecessary node can be found. The resulting MST
represents the desired plan for the multi-robot system.
A flowchart of the complete Agent-Based Flood-
ing Search algorithm can be seen in Figure 2, and
Figure 3 pictures a complete example of the planning
process.
3.4 Characteristics and Evaluation
An advantage of the presented search algorithm is its
completeness. If there is a solution it will find one;
if there is no solution, it will report it. In the case
of an unsolvable configuration, the search algorithm
will not move from the expansion step to the opti-
mization step. The breaking condition, saying that
all agents are in one connected component, can never
be reached because that connected component would
be a valid (yet suboptimal) plan. Thus, at a certain
point, there are no more active agents which are not
expanded. At this point we know that there is no valid
solution.
Another advantage of the agent-based search is
that the agents just need local information about
which agent has to be expanded, enabling the expan-
sion step to be parallelised. Hence, each agent can be
expanded independently. This works well for regions
far away from each other. But if those regions grow
together,it might happen that a certain string of agents
expands faster than other agents as the expansion is
done in an asynchronous way. This may increase the
number of relay nodes in the resulting plan. The prior-
ity values in the agents’ internal states help to balance
the expansion among the different agents. As a result,
the search process is more evenly distributed over the
target area, especially if two expanding regions grow
together. Please note that the Agent-Based Flooding
Search is usable as an asynchronous, parallel search
algorithm, but cannot be used in a decentralized way
as the breaking condition has to be checked by a cen-
tral entity.
As we have shown, the problem we try to solve
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
226
(a) (b)
(c) (d)
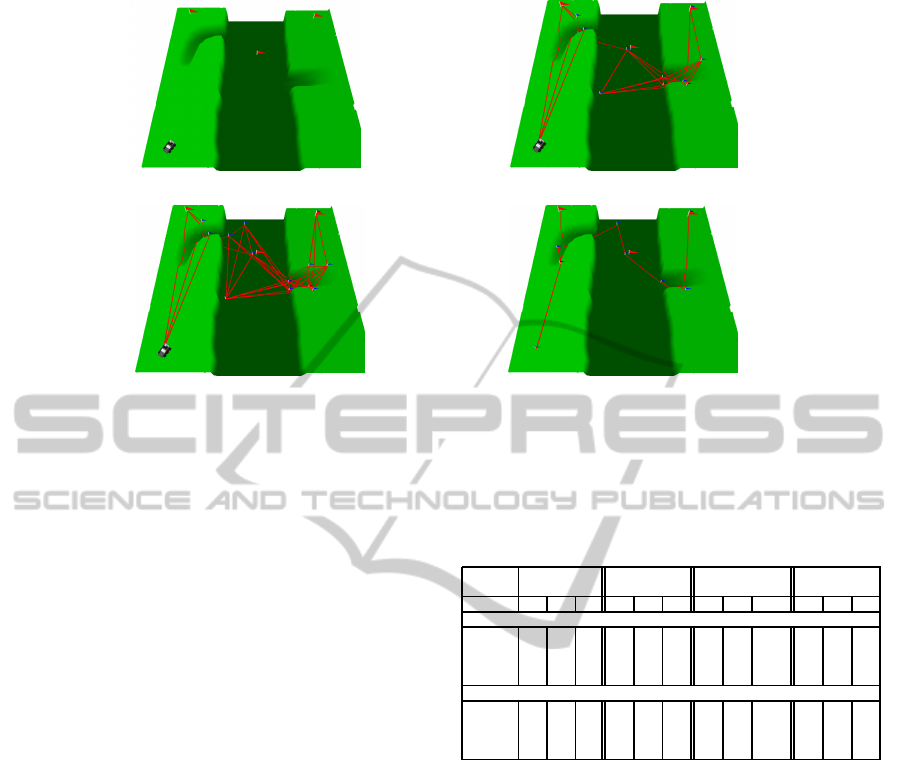
Figure 3: An example of the Agent-Based Flooding Search for multi-robot planning. (a) Shows the initial state. The robot
represents the starting position, the red flags the target positions. (b) The search during an expansion step. (c) Here the
breaking condition triggers. All agents are within one connected component. (d) The resulting tree which connects the
starting position and the target positions.
is equivalent to the Steiner tree problem. Thus we
compare our Agent-Based Flooding Search with a
well-known Steiner tree heuristic, Melhorn’s algo-
rithm (see (Mehlhorn, 1988)). As we have to find the
optimal number of relay nodes, we use Melhorn’s al-
gorithm only on G
con
while the Agent-Based Flood-
ing Search works on the SCGs and therefore con-
siders G
con
as well as G
mov
. Additional benefits of
this approach for multi-robot planning can be seen in
(Brueggemann et al., 2012). To compare these two
algorithms, we used four different simulated environ-
ments and three different constraints. Two of the en-
vironments (landscape and canyon) are artificial envi-
ronments while the other two (Geb3 and TDSuS) are
real world maps gathered by a 3D laser scanner. The
three constraints are:
• distance constraint: C
dist
(v
i
, v
j
) = 1 if the Eu-
clidean distance between v
i
and v
j
is lower than
a certain threshold.
• communication constraint: C
com
(v
i
, v
j
) = 1 if a
given wave propagation model states that there is
communication available between v
i
and v
j
.
• visibility constraint: C
vis
(v
i
, v
j
) = 1 if a robot on
v
i
is able to see another robot on v
j
and vice versa.
For each combination of environment and constraint
we performed 500 runs in simulation. Each of those
runs had a different configuration of starting posi-
tion and target positions. The number and place-
ment of starting position and end positions were ran-
domly chosen. There were always one starting posi-
tion and between 3 and 10 end positions, randomly
distributed in the environment. Only solvable config-
Table 1: Results of the simulation tests. For each planner,
each map was tested with each constraint in 500 runs.
Robot in final Max length Time for Total
positioning in plan final positioning planning time
map vis com dist vis com dist vis com dist vis com dist
Steiner Tree heuristic
Canyon 7.1 8.7 7.7 57.9 63.3 47.8 54.0 13.0 27.1 57.7 14.4 28.5
Landscape 7.3 8.2 7.5 39.8 38.1 33.6 56.0 16.0 26.1 59.9 16.8 27.7
Geb3 7.4 7.4 6.8 27.2 28.8 25.1 24.5 7.8 14.1 24.7 8.2 14.7
TDSuS 8.6 7.9 6.9 64.3 49.3 37.3 16.8 29.9 74.8 18.6 31.2 77.9
AgentPlanner
Canyon 8.1 8.3 8.5 37.6 45.3 38.2 15.1 32.0 79.0 18.2 32.5 80
Landscape 7.5 8.9 8.2 29.7 28.8 28.7 8.2 12.4 18.4 9.7 13.0 19.5
Geb3 8.3 7.7 7.7 22.8 24.6 25.5 2.0 12.2 22.7 2.4 12.6 23.5
TDSuS 10.3 8.5 7.9 36.7 37.2 35.9 29.7 19.0 60.3 30.1 20.2 63.2
urations were taken into account.
Several different characteristics of solutions from
the Agent-Based Flooding Search in comparison with
the Steiner Tree heuristic as baseline can be seen in
table 1.
These numbers provide a strong indication that,
regarding performance, the Agent-Based Flooding
Search is comparable to Mehlhorn’s Algorithm, at
least for our typical application environments. The
number of robots in the final positions is similar
in the Steiner Tree heuristic and in the agent-based
planner, which, depending on the environment, uses
not more than one additional robot. On the other
hand, the agent-based planer computes plans with a
much shorter maximum length of one particular path,
which significantly reduces the execution time for
such plans. Generally, the computation time of the
two approaches depends strongly on the environment
and shows no clear advantage for one specific ap-
proach.
AsynchronousFloodingPlannerforMulti-RobotNavigation
227

4 SEARCH ON DYNAMIC
GRAPHS
So far we have considered static graphs. As already
mentioned, an important advantage of the Agent-
Based Flooding Search is its ability to deal with dy-
namic graphs. In general, dynamic graphs can change
their edges or nodes. In this paper we will address two
different kinds of dynamic environments. In the first
part we deal with a known environment which might
change after a solution is found. The second subsec-
tion deals with unknown environments. In this setup
information about the environment is collected while
the robots are moving, and the representing graphs are
build up online.
4.1 Dynamic Environments
In dynamic environments we just address the removal
of edges in G
mov
or G
con
. We do not deal with changes
due to new edges. They might offer the opportunity
to enable shorter plans but will not corrupt an existing
path. So only the removal of one or more edges may
corrupt the plan in a way that requires re-planning.
To deal with such a dynamic environment we have
to change the Agent-Based Flooding Search so that it
will react to changes in the graphs. Simply speaking,
the central entity which checks the braking condition
in the expansionstep (see section 3.2) continuesto run
during the plan execution phase. Thus, as soon as the
graph changed in a way that the activated agents are
no longer in a connected component, this is noticed
and the search algorithm restarts with the expansion
step. Thereby, the search process does not have to be
completely re-initialised. Instead, as there are already
some activated agents from the former solution, the
search can be restarted with a predetermined direc-
tion. If there are only some small changes necessary,
the search process will find them quickly. However,
the completeness guarantees a valid solution even if
the former plan does not fit at all. This makes the
Agent-Based Flooding Search a valid approach for
dynamic graphs. An example re-planning due to a
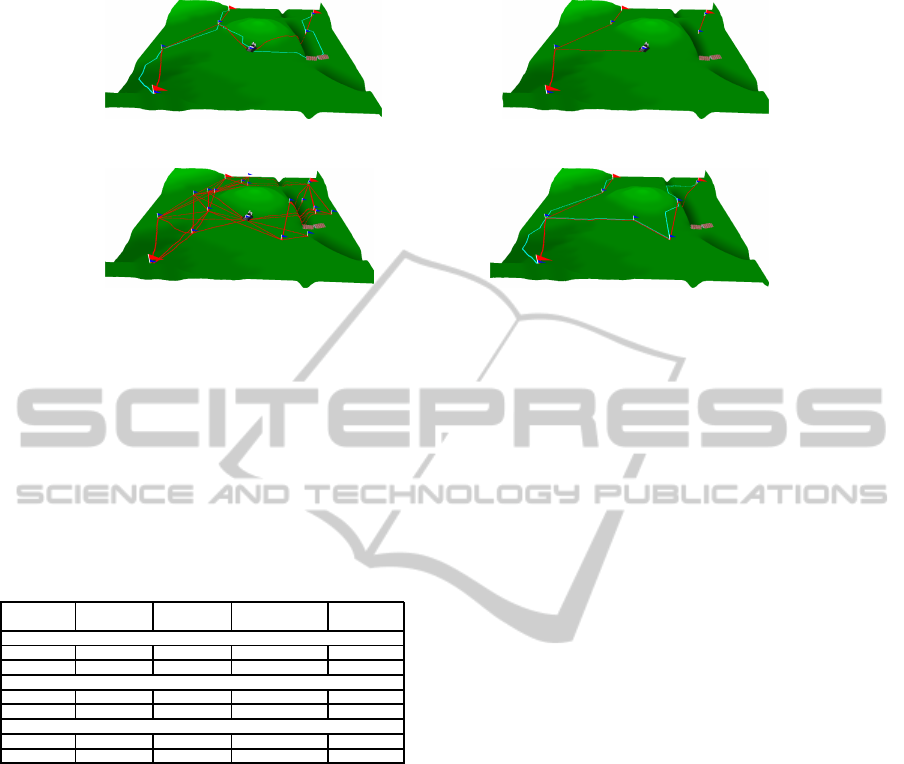
change in the environment can be seen in Figure 4:
Here the robot represents the starting position; the
red flags represent the target positions; the blue flags
represent the relay nodes. The red lines show the
Steiner tree-like solution for connecting the starting
position with the target positions. The turquoise line
shows the path the robots are going to follow. In Fig-
ure 4a the existing solution is invalid because a block-
ing obstacle appeared on the lower bridge. As now
there is no longer a way between the starting position
and the relay position in the upper right, the repre-
senting agents are no neighbours (see figure 4b). Thus
the expansion step starts again. Figure 4c shows the
new expansion, which lasts until all active agents are
connected again. As the originally activated agents
are also used, the search can be performed with pre-
vious knowledge. A new valid solution is shown in
figure 4d. Now the path follows the upper bridge. All
changes are localized in the region where the obsta-
cle occurred, the other half of the plan remains un-
touched.
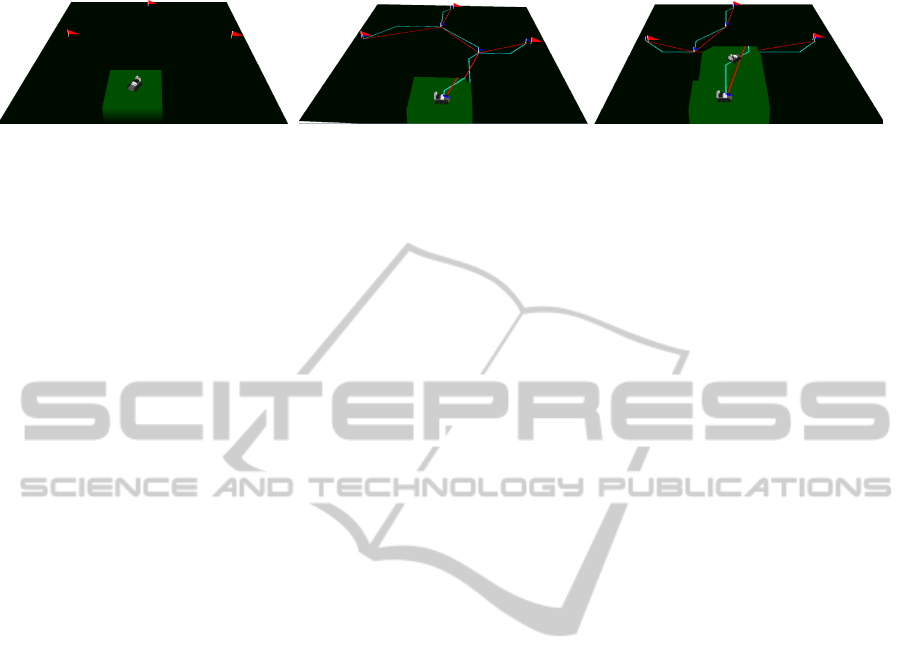
4.2 Unknown Environments
In an unknown environment the status of G
mov
and
G
con
is unknown from the beginning. We assume that
only the area a robot has already visited is known and
does not change any more. So the movement graph
and the constraint graph will get known only during
the execution of the plan (see Figure 5). Thus the plan
will have to change over time.
To find a plan with the Agent-Based Flooding
Search we have to make some assumptions about the
unknown areas. The frontier between known and
unknown areas is continuous. This is necessary be-
cause otherwise the movement graph would not reach
into unknown environment. There are no obstacles
in unknown areas and the surface is flat. This means
the movement graph in unknown areas is fully linked
and constraints are not influenced by the environment.
And if there is only one node of v
i
, v
j
in C(v
i
, v
j
) in-
side the unknownarea, we assume the same height for
both nodes.
Those assumptions enable the Agent-Based
Flooding Search to find a plan and update it while
the robots are moving. In simulated environments
we could observe that the plan as a whole often
changes drastically during execution. This signifi-
cantly slows down the execution time because every
time the robots have to be called back. Therefore, we
examined three methods to stabilize the plans: Firstly,
we penalized paths through unknown areas. This is
a common method to avoid alternating paths during
exploration. Secondly, we tried to reuse relay nodes
already settled by a robot. As soon as a relay node
is occupied by a robot, this relay node has to be in-
cluded in any further solution. Such a node can only
be deleted if it is a leaf in the plan. Thirdly, we relaxed
the primary assumptions of unknown areas. They are
very conservative as they usually underestimate the
number of edges in G
con
. The relaxing method, in
contrast, always assumes a connection between two
nodes v
i
and v
j
in G
con
if the line from v
i
to v
j
cuts
unknown areas.
To evaluate those methods we have run different
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
228
(a) (b)
(c) (d)
Figure 4: A planning example in a dynamic graph.
configurations of target positions in different envi-
ronments with different constraints. We counted the
number of steps the robots performed until the plan
is solved and normalized the results to the number of
steps needed by the original algorithm. Table 2 shows
the results.
Table 2: Influence of stabilizing methods on execution time.
The execution time of the original algorithm was used to
scale the results.
Original Reuse Penalize Relaxing
algorithm relay nodes unknown paths constraints
Distance constraint
Canyon 1 1.05 0.63 1.33
Landscape 1 3 0.96 0.96
Communication constraint
Canyon 1 0.68 1,47 0.62
Landscape 1 0.47 1.17 0.43
Visibility constraint
Canyon no solution no solution no solution solution
Landscape 1 0.59 1.84 0.28
One can see that the reuse of occupied relay nodes
and the relaxing method have a positive influence on
the execution time. However, due to the way the reuse
method works, the number of robots needed to exe-
cute the plan always rises during execution. The re-
laxing method on the other hand does not need more
robots than the original algorithm. Additionally, the
relaxing method allows solutions in special cases (see
table 2, visibility constraint, canyon). Here the robots
have to use ramps to get to different sections of the
environment. Such a ramp is not passable for the orig-
inal algorithm. It is most likely that the direct connec-
tion between a node v
i
on the ramp in the known area
and v
j
in the unknown area will cut the surface, as the
original algorithm assumed that v
i
and v
j
are on the
same hight. This results in a violation of the visibility
constraint and thus in a non-traversable edge. So the
relaxing method enlarged the solution space in a way
that in special environments a solution can be found.
Nevertheless, even with the relaxing method, the
execution time of plans in unknown environments is
high. This results from the two opposing tasks the
robots have to perform in an unknown environment:
1) reach the target positions as fast as possible and
2) explore the environment to find a good plan. So
it might be a good idea to combine the search with
multi-robot exploration like in (Burgard et al., 2000)).
Nevertheless, the Agent-Based Flooding Search is
also able to deal with unknown environments.
5 CONCLUSIONS AND FUTURE
WORK
In this paper we presented a search algorithm which
is able to find short routes from one starting posi-
tion to several target positions and, therefrom, cal-
culates navigation plans for a multi-robot system.
The presented approach uses methods from ad-hoc
network implementations and merges them with an
agent-based view, resulting in an asynchronous par-
allel undirected search. We have also shown that the
algorithm works on known dynamic graphs and, to a
somewhat lesser extent, in unknown graphs.
As the presented search uses only local informa-
tion about the neighbourhood of the activated agents,
the Agent-Based Flooding Search does not have to
be changed for using it on dynamic graphs. Al-
though there are solutions for dynamic Steiner trees
(see (Ding and Ishii, 2000) or (Blin et al., 2009)) our
solution has the advantage of not having to deal with
dynamic graphs as a special case. The use of only lo-
cal information also reduces the computation time in
large environments, if only small parts of it are really
affected.
Our main application for the Agent-Based Flood-
ing Search is to compute navigation plans for a multi-
robot system where the problem is to maintain a
AsynchronousFloodingPlannerforMulti-RobotNavigation
229
(a) (b) (c)
Figure 5: The first steps of a planning query in an unknown environment. (a) Initially, only the area around the starting point
is known. (b) A first plan is generated by the search algorithm. (c) During the execution of the plan, more and more of the
environment is discovered. So the initial plan has to be adjusted.
certain constraint, like continuous communication.
Therefore, we not only have to find a valid way for
each robot, but we also have to find relay positions
to hold the constraint. The actual execution of a
computed plan using a real heterogeneousmulti-robot
system is explicitly described in (Br¨uggemann et al.,
2012). In the next step we want to find new applica-
tions where such a search can be useful. This might
be applications in which we have to search for several
targets in a large, dynamic graph. Especially if the
neighbourhood is easy to compute, our Agent-Based
Flooding Search might add some value to such prob-
lems.
REFERENCES
(1996). Radio equipment and systems: High performance
radio local area network (hiperlan) type 1, functional
specifications,. Technical report, ETSI STC-RES10
Committee.
Blin, L., Potop-Butucaru, M., and Rovedakis, S. (2009). A
superstabilizing log (n)-approximation algorithm for
dynamic steiner trees. Stabilization, Safety, and Secu-
rity of Distributed Systems, pages 133–148.
Brueggemann, B., Brunner, M., and Schulz, D. (2012). Spa-
tially constrained coordinated navigation for a multi-
robot system. Ad Hoc Networks, (0):–.
Br¨uggemann, B., Langetepe, E., Lenerz, A., and Schulz, D.
(2012). From a multi-robot global plan to single robot
actions. In Proceedings of Informatics in Control, Au-
tomation and Robotics (ICINCO).
Burgard, W., Moors, M., Fox, D., Simmons, R., and Thrun,
S. (2000). Collaborative multi-robot exploration. vol-
ume 1, pages 476–481 vol.1.
Ding, S. and Ishii, N. (2000). An online genetic algorithm
for dynamic steiner tree problem. In Industrial Elec-
tronics Society, 2000. IECON 2000. 26th Annual Con-
fjerence of the IEEE, volume 2, pages 812–817 vol.2.
Gilbert, E. and Pollak, H. (1968). Steiner minimal trees.
SIAM Journal on Applied Mathematics, pages 1–29.
Lagoudakis, M. G., Markakis, E., Kempe, D., Keskinocak,
P., Kleywegt, A., Koenig, S., Tovey, C., Meyerson, A.,
and Jain, S. (2005). Auction-based multi-robot rout-
ing. In Robotics: Science and Systems, pages 343–
350. Citeseer.
Mehlhorn, K. (1988). A faster approximation algorithm
for the steiner problem in graphs. Inf. Process. Lett.,
27(3):125–128.
Monier, P., Doniec, A., Piechowiak, S., and Mandiau, R.
(2010). Metrics for the evaluation of discsp: some
experiments on multi-robot exploration. In Web In-
telligence and Intelligent Agent Technology (WI-IAT),
2010 IEEE/WIC/ACM International Conference on,
volume 2, pages 370–373. IEEE.
Mosteo, A. R., Montano, L., and Lagoudakis, M. G.
(2008). Multi-robot routing under limited communi-
cation range. In IEEE International Conference on
Robotics and Automation (ICRA) 2008.
Mosteo, A. R., Montano, L., and Lagoudakis, M. G.
(2009). Guaranteed-performance multi-robot rout-
ing under limited communication range. In Dis-
tributed Autonomous Robotic Systems 8, pages 491–
502. Springer Berlin Heidelberg.
Qayyum, A., Viennot, L., and Laouiti, A. (2002). Mul-
tipoint relaying for flooding broadcast messages in
mobile wireless networks. In System Sciences, 2002.
HICSS. Proceedings of the 35th Annual Hawaii Inter-
national Conference on, pages 3866–3875.
ˇ
Cagalj, M., Hubaux, J.-P., and Enz, C. (2002). Minimum-
energy broadcast in all-wireless networks: Np-
completeness and distribution issues. In Proceedings
of the 8th annual international conference on Mo-
bile computing and networking, MobiCom ’02, pages
172–182, New York, NY, USA. ACM.
Zou, H. and Choueiry, B. (2003). Multi-agent based search
versus local search and backtrack search for solving
tight csps: A practical case study. In Working Notes of
the Workshop on Stochastic Search Algorithms (IJCAI
03), Acapulco, Mexico, pages 17–24.
ICINCO2013-10thInternationalConferenceonInformaticsinControl,AutomationandRobotics
230
