
Enhancing Clustering Technique with Knowledge-based System to
Plan the Social Infrastructure Services
Hesham A. Salman
1
, Lamiaa Fattouh Ibrahim
2, 3
and Zaki Fayed
4
1
Department of Information Systems, Faculty of Computing and Information Technology, King Abdulaziz University,
Jeddah, Saudi Arabia
2
Department of Computer Sciences and Information, Institute of Statistical Studies and Research,
Cairo University, Cairo, Egypt
3
Department of Information Technology, Faculty of Computing and Information Technology, King Abdulaziz University,
Jeddah, Saudi Arabia
4
Department of Computer Science, Faculty of Computer and Information Sciences, Ain Shams University,
B.P. 42808 Zip Code 21551- Girl Section, Jeddah, Saudi Arabia
Keywords: DBSCAN Clustering Algorithm, Infrastructure City Planning, Spatial Clustering Algorithm, Urban Plan-
ning, Public Service Facility.
Abstract: This article present new algorithm for clustering data in the presence of obstacles. In real world, there exist
many physical obstacles such as rivers, lakes, highways and mountains..., and their presence may affect the
result of clustering significantly. In this paper, we study the problem of clustering in the presence of obsta-
cles to solve location of public service facilities. Each facility must serve minimum pre-specified level of
demand. The objective is to minimize the distance travelled by users to reach the facilities this means also to
maximize the accessibility to facilities. To achieve this objective we developed CKB-WSP algorithm (Clus-
tering using Knowledge-Based Systems and Weighted Short Path). This algorithm is Density-based cluster-
ing algorithm using Dijkstra algorithm to calculate obstructed short path distance where the clustering dis-
tance represents a weighted shortest path. The weights are associated with intersection node and represent
the population number. Each type of social facility(schools, fire stations, hospitals, mosque, church…) own
many constraints such as surface area and number of people to be served, maximum distance, available lo-
cation to locate these services. All these constraints is stored in the Knowledge-Based system. Comparisons
with other clustering methods are presented showing the advantages of the CKB-WSP algorithm introduced
in this paper.
1 INTRODUCTION
Clustering is one of the most useful tasks in data
mining process. The different algorithms can be
classified regarding different aspects. These methods
can be categorized into partitioning methods (Han et
al., 2001); (Bradly et al., 1998
) hierarchical methods
(Zhang and Rousseeuw,
1996); (Guha et al., 1998),
density based methods (Ester et al., 1996); (Ankerst
et al., 1999),
grid based methods (Sheikholeslami et
al., 1998); (Agrawal et al., 1998) and model based
methods (Kohonen, 1982). The clustering task con-
sists of separating a set of objects into different
groups according to some measures of goodness that
differ according to the application. The applications
of clustering in spatial databases present important
characteristics. Spatial databases usually contain
very large numbers of points (Nanopoulosl et al.,
2001).
In spatial databases, objects are characterized
by their position in the Euclidean space and, natural-
ly, dissimilarity between two objects is defined by
their Euclidean distance (Tan et al., 2006).
Civil engineers often play a major role within the
complex planning processes needed to determine the
infrastructure location (or layout) and its capacity
(Bigotte and Antunes, 2007).
The social infrastructure planning problems
faced by public authorities typically consist of de-
termining where the facilities of some infrastructure
network should be located and what should be the
capacity of these facilities.
Very often, the number of possible solutions for
401
A. Salman H., Fattouh Ibrahim L. and Fayed Z..
Enhancing Clustering Technique with Knowledge-based System to Plan the Social Infrastructure Services.
DOI: 10.5220/0004391504010408
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 401-408
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

social infrastructure planning problems is extremely
large and it is advantageous to handle them through
a type of optimization model called location (or
location-allocation) models. These models are clas-
sified as continuous or discrete depending on wheth-
er the facilities can be located anywhere on the plane
or only in some pre-specified points of the plane.
Discrete location models are used more often than
continuous location in real-world applications. For
this reason they have been extensively studied since
the early 1960s, and there is a vast body of literature
describing models and solution methodologies.
Clustering technique will be used for helping en-
gineers to determine where the facilities of some
infrastructure network should be located and what
should be the capacity of these facilities and layout.
In many real applications the use of direct Eu-
clidean distance has its weaknesses (Tan, et al.,
2006). The Direct Euclidean distance ignores the
presence of streets, paths and obstacles that must be
taken into consideration during clustering.
In this paper, a clustering–based solution is pre-
sented depending on using the obstructed short path
distance and density-Based Clustering techniques.
A typical real-world application of the model is
school network planning. In this case, the model
would aim to determine the locations and capacities
of schools to minimize the distance traveled by stu-
dents, taking into account that the students must be
assigned to the school that is closer to the place
where they reside. In section 2 Motivation is discuss.
In section 3, the
CKB-WSP algorithm is introduced.
A case study is presented in section 4. Section 5
discusses related work. The paper conclusion is
presented in section 6.
2 MOTIVATION
Spatial clustering algorithms can be classified into
four categories. They are the partition based, the
hierarchical based, the density based and the grid
based. Among all the clustering methods, we found
that the partitioning based and density algorithms to
be most suitable since our objective is to discover
good locations that are hidden in the data. Partition-
ing based clustering methods include two major
categories, k-means and k- medoids. The common
premise of these two methods is to randomly parti-
tioning the database into k subsets and refine the
cluster centers repeatedly to reduce the cost func-
tion. The cost function in the spatial domain is the
sum of distance error distance E from all data ob-
jects to their assigned centers.
The non center data points are assigned to the
centers that they are nearest to it. The k-means algo-
rithm is one of the first clustering algorithms pro-
posed. It is easy to understand and implement, and
also known for its quick termination. The k-means
algorithm defines the cluster centers to be the gravi-
ty center of all the data points in the same cluster. In
regular planar space, the cluster gravity center guar-
antees the minimum sum of distances between the
cluster members and itself. However, the research
proof (Nanopoulosl et al., 2001) that the characteris-
tic of the gravity center does not behave the same as
in obstacle planner space. Instead of representing the
clusters by their gravity centers, the k-medoids algo-
rithm chooses an actual object in the cluster as the
clusters representative (medoid). Using the real ob-
ject decreases the k-medoids sensitivity to outliers.
This technique also guarantees that the center is
accessible by all data objects within the same clus-
ter.
By comparing CLARA and CLARANS with
PAM, CLARA first draws random samples of the
data set and then does PAM on these samples. Un-
like CLARA, CLARANS draws a random sample
from all the neighbor nodes of the current node in
the searching graph. Efficiency depends on the sam-
ple size and a good clustering based on samples will
not necessarily represent a good clustering of the
whole data. The PAM (Partioning Around Medoids)
algorithm, also called the K-medoids algorithm,
represents a cluster by a medoid (Tan et al., 2006).
Initially, the number of desired clusters is input and
a random set of k items is taken to be the set of me-
doids. Then at each step, all items from the input
dataset that are not currently medoids are examined
one by one to see if they should be medoids. That is,
the algorithm determines whether there is an item
that should replace one of the existing medoids. By
looking at all pairs of medoids, non-medoids objects,
the algorithm choose the pair that improves the
overall quality of the clustering the best and ex-
changes them. Quality here is measured by the sum
of all distances from a non-medoid object to the
medoid for the cluster it is in.
The total impact to quality by a medoid change
TC
ih
is given by:
TC
ih
=
k
hCn
ih
hi
nndis
1
),(
(1)
An item is assigned to the cluster represented by the
medoid to which it is closest (minimum distance or
direct Euclidean distance between the customers and
the center of the cluster they belong to).
PAM is not suitable for our problem because the
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
402

Euclidian distance did not represent the actual in the
presence of obstacle. The second reason, the number
of facilities is not known before work. The last rea-
son we need each facility service a predefine number
of population (density population).
The DBSCAN algorithm is a well-known algo-
rithm of type Density-Based (Yiu and Mamoulis,
2004) algorithm which is used when a cluster is a
dense region of points, which is separated by low-
density regions, from other regions of high density.
This algorithm found clusters with different shapes.
This algorithm also is not suitable where our problem
has not this property. We search a clustering algo-
rithm which construct cluster with a density within a
given range and also a point in this cluster which
represent this cluster such that the cost is minimum.
3 CKB-WSP ALGORITHM
The existing of the natural obstacles are affecting on
distribution of the service facility on the regions.
The responsible civil engineers determine the infra-
structure location and layout. Very often, the number
of possible solutions for social infrastructure plan-
ning problems is extremely large and it is advanta-
geous to handle them through a type of optimization
model. These models are classified as continuous or
discrete depending on whether the facilities can be
located anywhere on the plane or only in some pre-
specified points of the plane. Discrete location mod-
els are used more often than continuous location in
real-world applications.
In a certain city, we need to determine the num-
ber of public service facility requirements and define
their boundaries in such away that satisfy shortest
path between users and facilities. We must take into
account that each facility must serve a minimum
level of demand to be economically viable and that
each user must assign to the closest work facility.
The solution we propose in this paper applies to
social infrastructure planning problems with the
following features:
- The objective is to minimize the demand-
weighted total distance (or travel time, or travel
cost).
- A facility can only be opened if it serves a mini-
mum level of demand. Thus the capacity of each
facility must exceed that given minimum to be eco-
nomically viable.
- The number of facilities to be opened is an out-
put of the model.
- Users must be assigned to the closest open facili
ty. If the travel distance is the same for two or more
different facilities, users should be assigned to one
and only one of those facilities.
The problem statement:-
Inputs:
- A set T data points {t
1
, t
2
… t
n
} in 2-D map.
- Surface of area to be plan.
- Obstacles location.
-
MinPTS = minimum population services for
this public services facility.
- MaxPTS= maximum population that can ser-
viced by this public services facility.
- Candidate locations of services facilities.
Objectives:
- Partitioning the city into k clusters C1, .., Ck
that satisfy clustering constraints (minimum and
maximum services population) such that the cost
function is minimized.
Min TC= obstacle distance (i, j)* wi
Where:
TC is the cost function to be minimize
Obstacle distance (i, j) = min path obstacle distance
between node i and facility j of the cluster which is
calculate by Dijkstra algorithm
wi = weight of node i = population of node i
Output:
- Optimal number of clusters which satisfy the
required objectives.
- locations of public services facility
- boundaries of each cluster.
The proposed algorithm contains three phases. Fig-
ure 1 shows the block diagram of the overall system.
The following sections describe these three phases.
3.1 Phase I: Pre-planning
The maps used for planning are scanned images
obtained by the user from GOOGLE map. It needs
some preprocessing operations before it used as
digital maps, we draw the streets and intersection
nodes on the raster maps, the beginning and ending
of each street are transformed into data nodes, de-
fined by their coordinates. The streets themselves
are transformed into links between data nodes. The
populations are considered to be the weights for
each node.
3.2 Phase II: Main-planning Phase
CKB-WSP is divided into two step:
1- Step 1: Preprocessing.
2- Step 2:
CKB-WSP algorithm.
EnhancingClusteringTechniquewithKnowledge-basedSystemtoPlantheSocialInfrastructureServices
403
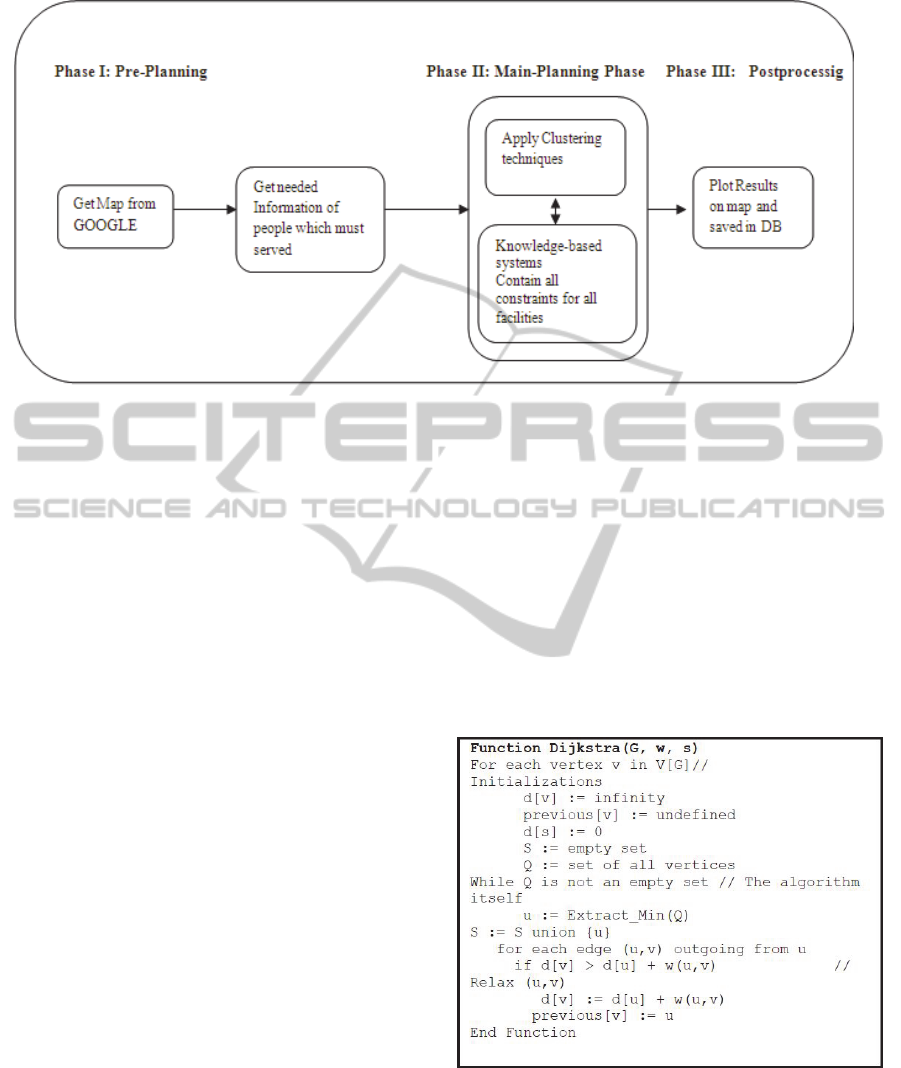
Figure 1: Block diagram of overall the CKB-WSP system.
3.2.1 Preprocessing
During clustering the CKB-WSP often needs to
compute the short obstructed path distance between
a point and a temporary cluster center. Our aim of
pre-processing here is to manipulate information
which will facilitate such computation.
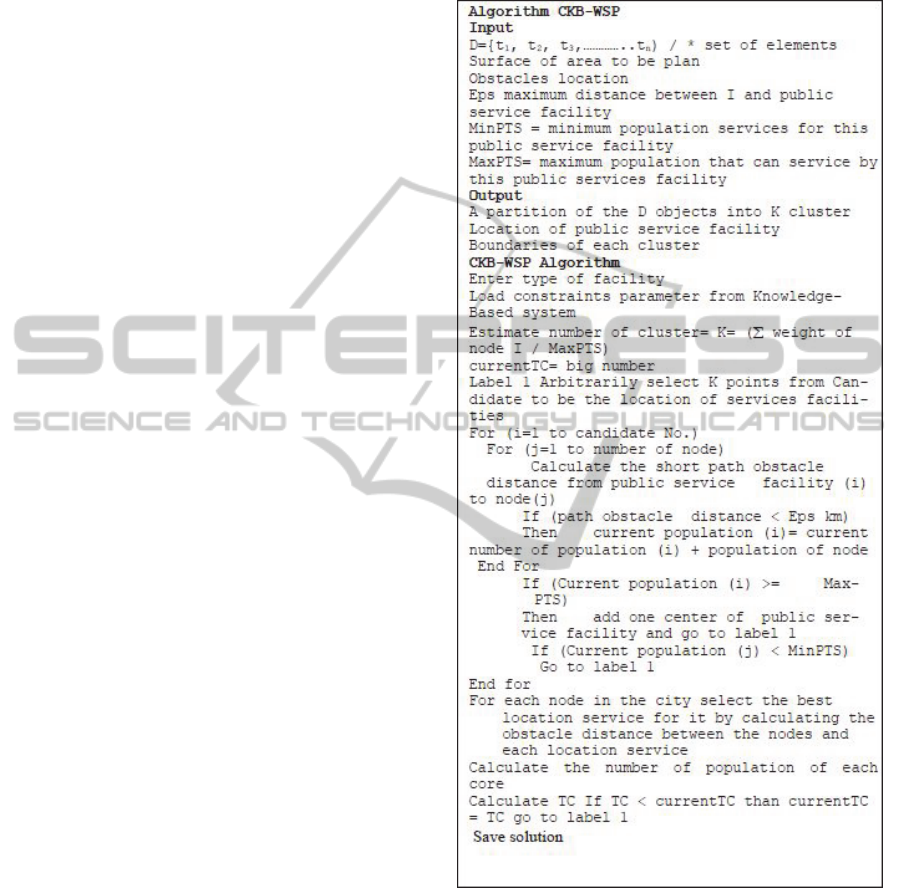
CKB-WSP algorithm used Dijkstra algorithm to
calculate shortest path from one source to many
destinations; in the
CKB-WSP we need to calculate
the shortest path from public service facility to all
nodes (the reason is to determine the suitable loca-
tion and layout of public service facility) and from
one node to all public service facility (the reason is
to determine the nearest suitable public service facil-
ity that will serve this node). Figure 2 shows the
pseudo code of the Dijkstra algorithm.
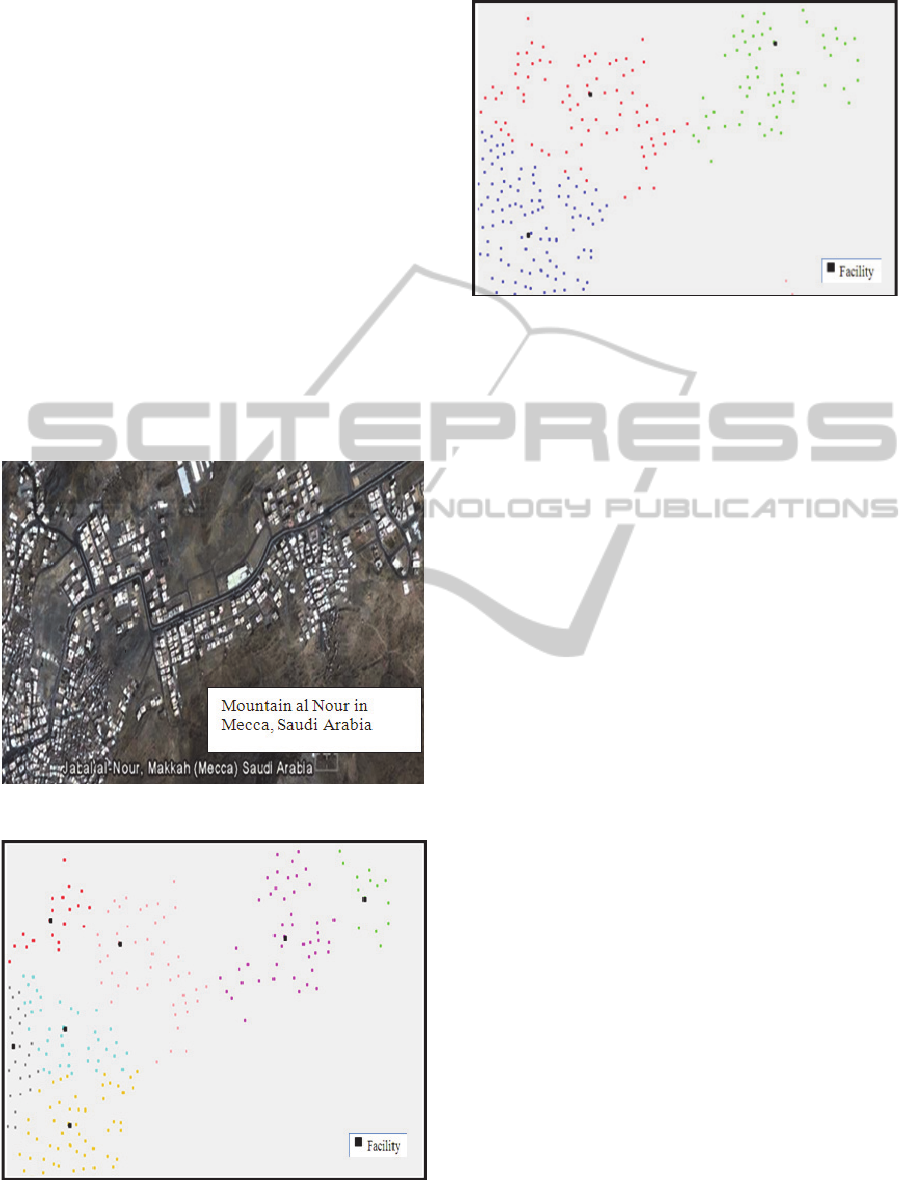
3.2.2 CKB-WSP Algorithm
Figure 3 shows implementation of pseudo code of
CKB-WSP algorithm used. The algorithm begins
with estimate number of clusters which is equal to
sum of population of all points divided by MaxPTS,
where MaxPTS is the maximum population this
facility can served.
The user first inserts the location of candidate. Our
package arbitrarily selects K points from candidates
to be the initial location of services facilities. After
this step the package determines the boundaries of
cluster by calculating the obstacle distance from
each node to each facility. The algorithm iterate until
chooses one which satisfies the conditions and min-
imize the cost function. Each type of facility has his
constraints. These constraints differ from one to
another. To open school, government determines
two constraints MinPTS which is the minimum
number of students that can open a school and Max-
PTS the maximum number of students which deter-
mine from the surface of the school.
The maximum
distance which can the students wake to go to school
Eps must be know. If the government needs to open
mosque, any human to pray need .5m*1 m to know
how many humans can pray in this mosque (Max-
PTS), divide surface of mosque by .5 m
2
. The max-
imum distance which can the human can wake to go
to mosque, Eps, must be know.
Figure 2: Pseudo code of the Dijkstra algorithm.
Knowledge-Based system is constructed and
contain all constraints which is affected the plan of
facilities services.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
404
3.3 Phase III: Post Processing
The output mined knowledge is presented graphical-
ly and as data in data base. The following section
shows case study and demonstrates the output
knowledge.
4 CASE STUDY
For real application, the proposed algorithm is ap-
plied on a map representing a district in Mecca in
Saudi Arabia. This area suffer of mountains the big-
ger one called Al Nour mountain. The actual map is
scanned, then the beginning and the ending of each
street are transformed into data points, defined by
their coordinates; the streets themselves are trans-
formed into linkages between data points; after that
the population of each node is added.
The CKB-WSP algorithm divided the map into
convenient number of clusters in which the popula-
tion is distributed.
Figure 4 shows this area; all dark areas represent
mountains area. Figure 5 shows the map after apply-
ing CKB-WSP algorithm which divides the map into
7 clusters when Eps= 50 and Minpnt= 4000. Figure
6 shows the map after applying CKB-WSP algo-
rithm which divides the map into 3 clusters when
Eps= 70 and Minpnt= 6000. From figure 5 and 6, the
location of facilities is not showed in the center of
cluster but move towards heavy nodes (population)
due to the weight parameter whish is introduced in
the cost function.
In the proposed algorithm you can enter in each
run the values of the minimum number of population
(MinPNT), maximum number of population (Max-
PNT) the facility can served and the radius of region
(Eps) which the facility will be serve. This makes
the algorithm more flexible to plan any facility (e.g.
preschool, hospital, telecommunication ser-
vice……).
5 RELATED WORK
In (Cornuejols et al., 1990), the most common objec-
tives is the minimization of costs. However, in the
authors’ experience, using this objective in participa-
tory social infrastructure planning processes often
poses problems. The main reason is that users are
reluctant to accept a cost minimization objective,
especially when the matter is the location of facili-
ties as important as schools or hospitals. Another
relevant reason is that cost information is often
scarce and poor, and cost values can be difficult to
estimate (particularly the value of fixed costs).
Figure 3: Implementation of CKB-WSP algorithm.
On the contrary, the maximization of accessibility to
facilities tends to be a more consensual objective
among the different stakeholders. This objective is
usually represented in location models by the mini-
mization of the demand-weighted total (or average)
distance traveled to obtain the service. One classic
model that considers this objective is the p-median
model (Mirchandani, 1990) originally; the p-median
model is based upon two important assumptions: one
EnhancingClusteringTechniquewithKnowledge-basedSystemtoPlantheSocialInfrastructureServices
405
knows a priori how many facilities should be opened
and the capacity of facilities does not have to satisfy
maximum and/or minimum limits. However, in a
social infrastructure planning problem, the number
of facilities to locate is typically one of the desired
outcomes (rather than a parameter) and the capacity
of facilities must be within certain limits.
Although there is an abundant literature on inca-
pacitated p-median models, capacitated versions
have been less studied. Moreover, most of the exist-
ing models only take into account maximum capaci-
ty constraints (recent examples include (Lorena and
Senne, 2004); (Ceselli and Righini, 2005)
; (Diaz and
Fernandez, 2006). However, minimum capacity
constraints are important because they model the
minimum level of demand that facilities must satisfy
to be economically viable. Above this level, possible
economies of scale have already been made, and unit
facility costs can be considered to be constant.
Figure 4: Area in Macca City in Saudi Arabia.
Figure 5: Using CKB-WSP algorithm considering the
location of obstruct Eps= 50 and Minpnt= 4000.
Figure 6: Using CKB-WSP algorithm considering the
location of obstruct Eps= 70 and Minpnt= 6000.
In (Bigotte, 2007), the model solve small-size
instances exactily using exact method. For large-size
instances, it uses heuristic methods. First, Using a
classic local search heuristic (Add + Interchange)
and classic population heuristic (GA) failed to iden-
tify optimum or near-optimum solutions but the
solutions provided by the (Add + Interchange) heu-
ristic were better than those given by the GA. Sec-
ond, Using, Tuba Search TS and Specialized Local
Search Heuristic SLSH in which the neighborhood
structure was improved to better represent the spe-
cific features of the model. SLSH generally provides
better solutions than TS, though requiring a larger
computing effort.
Table 1 described the different comparison be-
tween the proposed method and other methods using
in facilities planning. There are two methods that are
frequently used here: Tabu search (Bigotte and
Antunes, 2007 )and Genetic Algorithms (Bigotte
and Antunes, 2007).
6 CONCLUSIONS
Clustering analysis is one of the major tasks in vari-
ous research areas. The clustering aims, to identify
and extracting significant groups in underlying data.
Based on certain clustering criteria; the data are
grouped so that the data points in a cluster are more
similar to each other than points in different clusters.
In this paper, we introduced a clustering solution to
the problem of locate public Service facility in the
presence of physical obstacles, the CKB-WSP algo-
rithm. This algorithm is density-based clustering
algorithm using distances which are weighted short-
est obstacle path distance (not Euclidian distance)
and satisfying facilities constraints due to use of
knowledge-based system. The result is a realistic
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
406

solution representing the population demand with
minimum costs due to modify in cost function.
The application of the CKB-WSP algorithm was
illustrated through a case study in a location of dis-
tricts in Mecca in Saudi Arabia. Experimental results
and analysis indicate that the CKB-WSP algorithm
is effective to satisfy populations demand for facility
constructed in an area where population is non-
homogeneous due to the presence of obstacles.
The existence of Knowledge-Based System helps
us to plan any new facility serves after define the
constraints of this facility in the Knowledge-based.
REFERENCES
Agrawal, R., Gehrke, J., Gunopulos, D., Raghavan,P.,
(1998). Automatic subspace clustering of high
dimensional data for data mining application. In Proc.
1998 ACM-SIGMOD Int. Conf. Management of Data
(SIGMOD’98).
Ankerst, M., Breunig, M., kriegel, H. and Sander, J.,
(1999). OPTICS: Ordering points to identify the
clustering structure. In Proc. 1999 ACM-SIGMOD Int.
Conf. Management of data ( SIGMOD’96).
Bigotte, J. F., Antunes, A. P., Social Infrastructure
Planning: A Location Model and Solution Methods,
Computer-Aided Civil and Infrastructure Engineering
22 (2007) 570–583.
Bradly, P., Fayyad, U., and Reina, C., (1998). Scaling
clustering algorithms to large databases. In proc. 1998
Int. Conf. Knoweldge Discovery and Data mining.
Ceselli, A.,&Righini,G. (2005),A branch-and-price
algorithm for the capacitated p-median problem,
Networks, 45(3), 125–42.
Cornuejols, G., Nemhauser, G. L. &Wolsey, L. A. (1990),
The uncapacitated facility location problem, in P.B.
Mirchandani and R. L. Francis (eds.), Discrete
Location Theory, JohnWiley & Sons, New York, pp.
119–71.
Diaz, J. A. & Fernandez, E. (2006), Hybrid scatter search
and path relinking for the capacitated p-median
problem, European Journal of Operational Research,
169(2), 570– 85.
Ester, M., Kriegel, H., Sander, J. and Xu, X., (1996). A
density based algorithm for discovering clusters in
large spatial databases. In Proc. 1996 Inc. Conf.
Knowledge discovery and Data mining (KDD’96).
Guha, S., Rastogi, R., and Shim, K. (1998). Cure : An
efficient clustering algorithm for large databases. In
Proc. 1998 ACM-SIGMOD Int. Conf. Management of
Data (SIGMOD’98).
Han, J., and Kamber, M., Data Mining Concepts and
Techniques, Elsevier, 2011.
Han, J., Kamber, M., and Tung, A., (2001). Spatial
Clustering Methods in data mining: A Survey,
Geographic Data Mining and Knowledge Discovery.
Ibrahim, L. F., (2011) Enhancing Clustering Network
Planning Algorithm in the Presence of Obstacles,
KDIR International Conference on Knowledge
Discovery and Information Retrieval, KDIR is part of
IC3K, the International Joint Conference on
Knowledge Discovery, Knowledge Engineering and
Knowledge Management, Paris, France 26- 29 October
2011.
Kohonen, T.,(1982). Self organized formation of
topologically correct feature map. Biological
Cybernetics.
Lorena, L. A.N.&Senne, E. L. F. (2004), A column
generation approach to capacitated p-median
problems, Computers and Operations Research, 31(6),
863–76.
Mirchandani, P. B. (1990), The p-median problem and
generalizations, in P. B. Mirchandani and R. L.
Francis, (eds.), Discrete Location Theory, John Wiley
& Sons, New York, pp. 55–117.
Nanopoulosl, A., Theodoridis , Y., Manolopoulos, Y.,
(2001). C2P: Clustering based on Closest Pairs.
Proceedings of the 27th International Conference on
Very Large Data Bases, p.331-340, September 11-14.
Sheikholeslami, G., Chatterjee, S. and Zhang, A., (1998).
Wave Cluster : A multi- resolution clustering approach
for very large spatial databases. In Proc. 1997 Int.
Conf. Very Large Data Bases ( VLDB’97).
Tan, P., Steinback, M., and Kumar, V., (2006).
Introduction to Data Mining. Addison Wesley.
Yiu, M., Mamoulis, N. (2004). Clustering Objects on a
Spatial Network. SIGMOD Conference p 443-454.
Zhang, T., Ramakrishnan, R., and Livny, M., (1996).
BIRCH: an efficient data clustering method for very
large.
EnhancingClusteringTechniquewithKnowledge-basedSystemtoPlantheSocialInfrastructureServices
407
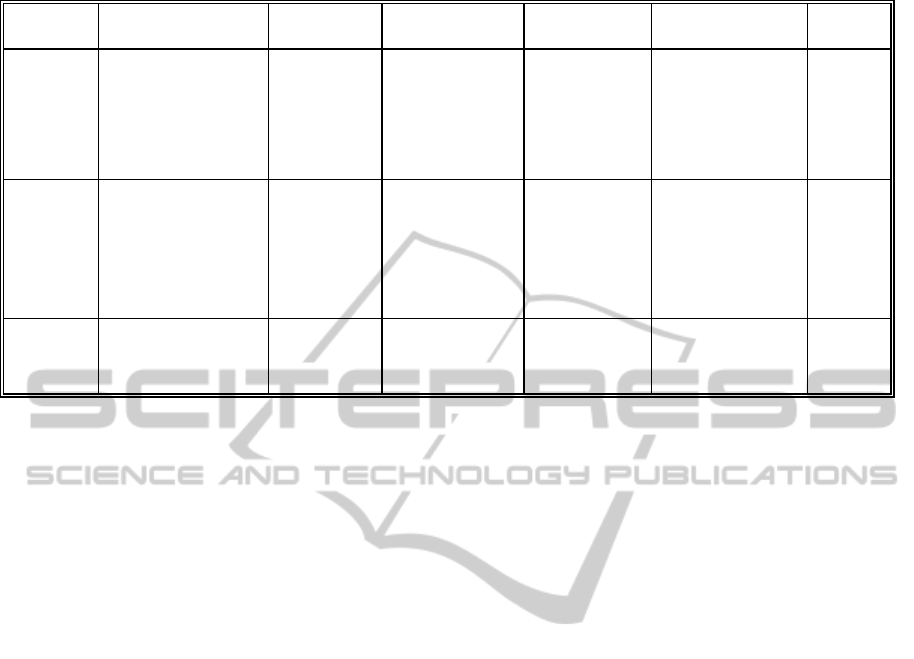
Table 1: Relative works.
Algorithm Input Parameters Results Location of facility Constraints Type of distance
Consider
obstacles
Genetic
- Data points
- Population
- Initial probability
- Mutation probability
- Crossover probability
- Number of iteration
- Selection pressure
# of facilities Optimal placement Fitness Function Euclidean distance NO
Tabu Search
- Data points
- Init probability
- Generation probability
- Recency factor
- Frequency factor
- Number of iteration
- Number of neighbors
# of facilities Optimal placement Tabu List Euclidean distance NO
CKB-WSP
- Data points
-Eps
- MinPNT
- MaxPNT
- Core points
- # of facilities
Core point
MinPts, Eps and
obstacles
Short path obstacles
distance
YES
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
408
