
Using Grid Related Cluster Schedule Resemblance for
Energy Rescheduling
Goals and Concepts for Rescheduling of Clusters in Decentralized Energy Systems
Astrid Nieße
1
and Michael Sonnenschein
2
1
OFFIS - Institute for Information Technology, Escherweg 2, 26121 Oldenburg, Germany
2
Department for Computer Science, University of Oldenburg, 26111 Oldenburg, Germany
Keywords:
Active Distribution Grids, Energy Scheduling, Virtual Power Plants, Graph Theory.
Abstract:
Transforming the electric power system to incorporating a considerably increased share of renewable dis-
tributed generation implicates new challenges for the control of the system. To overcome the known short-
comings of centralized control, e.g. regarding scalability and robustness, a decentralized, self-organized sys-
tem of agents for generators, loads and storages is widely discussed. We focus on a dynamic aggregation of
these units to participate on current and future energy markets for both active power and new ancillary services
products. With these units participating in system services, rescheduling of units within clusters becomes a
more complex task that should reflect grid usage properties.
In this work, we develop grid related cluster schedule resemblance as a metric to analyze the grid usage
changes using graph theory. This metric can be used to compare different rescheduling options regarding grid
usage for both dynamic clusters of distributed energy resources and for rescheduling of static clusters like
virtual power plants. An example is used to show that this metric can be used as a separate optimization target
for the multi-criteria optimization problem of cluster rescheduling.
1 INTRODUCTION
Transforming the electric power system to incorporat-
ing a considerably increased share of renewable dis-
tributed generation implicates new challenges for the
control of the system: The control method has to cope
with many individually configured, distributed, small
generation units and with fluctuation in their feed-
in. These units can form clusters to participate in en-
ergy markets - a concept well known as virtual power
plants (VPP) as presented by Bitsch, Feldmann and
Aumayr (2002) or Abarrategui, Marti and Gonzalez
(2009).
Traditional energy management relies on cen-
tralized systems to control a static set of conven-
tional power plants. The concept of VPPs mim-
ics this approach by aggregating small units to cen-
trally controlled static clusters that are able to cope
with the market barriers on nowadays energy mar-
kets. To overcome the known shortcomings of cen-
tralized control, e.g. regarding scalability and robust-
ness, a decentralized, self-organized system of agents
for small active units (generators, loads, storages) has
been proposed for several years (Kok et al., 2005),
(Dimeas and Hatziargyriou, 2007), (Jansen et al.,
2008), (Kok, 2010), (Ramchurn et al., 2012). Besides
this control concept designed for active power product
delivery, distributed units are needed to fulfill grid-
stabilizing tasks to effectively substitute fossil power
plants not only from an energy market point of view,
but also reflecting grid operation constraints. In such
a scenario, distributed energy components (both gen-
erating and consuming power) form clusters to partic-
ipate on energy markets and to fulfill grid-stabilizing
tasks with different requirements regarding the loca-
tion of the units in the power grid.
Market design, cluster formation for distributed units
and the task of continuous energy scheduling are the
main tasks that have to reflect the requirements and
effects of using distributed units for grid stabilization
purposes. This paper deals with continuous energy
rescheduling for clusters of small distributed gener-
ation units, consumers and electrical storage as de-
scribed by Nieße, Lehnhoff, Tr¨oschel, Uslar, Wiss-
ing, and Appelrath (2012). A metric is introduced to
include grid aspects in the multi-criteria optimization
problem of energy cluster rescheduling.
The rest of this paper is structured as follows:
22
Nieße A. and Sonnenschein M..
Using Grid Related Cluster Schedule Resemblance for Energy Rescheduling - Goals and Concepts for Rescheduling of Clusters in Decentralized
Energy Systems.
DOI: 10.5220/0004374000220031
In Proceedings of the 2nd International Conference on Smart Grids and Green IT Systems (SMARTGREENS-2013), pages 22-31
ISBN: 978-989-8565-55-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

First, the task of continuous cluster energy scheduling
is described, giving an insight in the optimization cri-
teria of this task and pointing out, why grid topology
matters. We then elaborate on related work regarding
rescheduling in the distribution grid and graph based
modeling of power grids. Then, a formal represen-
tation of the power grid as a weighted graph is pro-
posed, including a weighting function and a concept
for neighborhood of units within a power grid. The
fifth section shows, how this concept can be used to
characterize the changed grid usage profile of a clus-
ter schedule consisting of individual units’ schedules.
Finally we point out, how these characteristics of a
cluster schedule can be used for optimized election of
a new cluster schedule.
2 CONTINUOUS ENERGY
SCHEDULING
2.1 Energy Products and Schedules
In our concept, small distributed generation units and
controllable loads form clusters and bid for products
on energy markets, e.g. on nowadays day-ahead mar-
kets. The scheduling is done for a time span T (e.g. 24
hours) as set of time intervals t
(i)
(e.g. with a length
of 1 minute). For the rest of this paper indices given
in brackets and superscript form relate to the respec-
tive time intervals, whereas all other indices are sub-
scripted.
A clusterC is defined as the set of aggregated units
u
i
:
C = {u
i
, ..., u
n
} (1)
A product p is defined by the amount of energy to
be delivered e
(i)
p
for each time interval t
(i)
as follows
(with T
(p)
pr
as set of all time intervals that the product
p spans):
p : T
(p)
pr
→ R, p(t
(i)
) = e
(i)
p
(2)
T
(p)
pr
⊂ T, T
(p)
pr
= {t
(i)
, ..., t
(i
max
)
} (3)
To realize a product, operation schedules os for each
cluster unit u are generated, reflecting the amount of
energy delivered or used by a unit (e
(i)
u
) and the costs
for this amount of energy (c
(i)
u
) for each time interval
t
(i)
(e.g. each minute of a day) for this specific unit:
os
u
: T → R
2
, os
u
(t
(i)
) = (e
(i)
u
, c
(i)
u
) (4)
The set of operation schedules of all units u that are
part of a cluster C is defined as:
OS = {os
u
i
|u
i
∈ C} (5)
A cluster schedule cs assigns an operation sched-
ule os
u
i
to each unit u
i
within the cluster:
cs : U → OS, cs(u
i
) = os
u
i
(6)
Following this cluster schedule, the product is ful-
filled, when the sum of power contributions by all
cluster units meets the product definition in each time
interval.
2.2 Incidents and the Need
for Rescheduling
Between market matching and product delivery
though, several incidents may render the operation
schedules infeasible. We distinguish three types of
incidents:
• Changed ReactivePower Behavior. When small
and distributed energy units are used for grid-
stabilizing issues, e.g. reactive power delivery,
hard real-time constraints have to be fulfilled. Re-
quirements like this e.g. for a fixed cos φ are de-
fined in national grid codes (e.g. (VDE, 2011) for
generating units in the low voltage level). In our
concept, we define such requirements in a more
dynamic fashion depending on the current grid
state as described by Gandor, Blank and Lehnhoff
(2012). A changed reactive power behavior may
lead to a changed active power profile. There-
fore this incident type can affect the active power
contribution without notification, although an in-
creased risk for such incidents might be known in
advance from the unit’s reactive power behavior
configuration.
• Changed Active Power Behavior. Prognosis
faults regarding active power feed-in behavior
are typical for fluctuating renewable energy re-
sources. Prognosis quality rises with decreasing
time to delivery. The same holds for prognoses
regarding the behavior of controllable and non-
controllable loads.
• Unit Failure. With a high share of distributed
and small units in such a system, unit failure with
preliminary notification (e.g. for maintenance) or
without (e.g. breakdown) has to be considered.
Incidents of these types may render the delivery of
the power product infeasible, thus raising the need for
rescheduling, i.e. generating new and valid operation
schedules for some of the units within the cluster.
2.3 Requirements and Goals for
Rescheduling
Generating a new cluster schedule has to reflect sev-
eral requirements:
UsingGridRelatedClusterScheduleResemblanceforEnergyRescheduling-GoalsandConceptsforReschedulingof
ClustersinDecentralizedEnergySystems
23

First, the power product has to be delivered as con-
tracted at the market. Although an exact delivery
may not be possible, the new cluster schedule should
minimize the deviation in active power delivery. It
should not be possible to trade off product delivery
costs against current balancing energy costs that have
to be paid in case of prognosis deviations. The Ger-
man energy market e.g. prevents such a tradeoff by
defining a lower margin for balancing energy costs
by the current power price on energy markets (Bun-
desnetzagentur, 2012).
Second, the additional costs that emerge from recon-
figurating the units within the cluster should be min-
imized, i.e. by minimizing the sum of reconfigura-
tion costs and the difference between costs for old
and new schedule execution. This requirement may
be weighed against the robustness of the new clus-
ter schedule: If rescheduling comes with additional
costs, the new schedule should be tolerant to addi-
tional incidents.
When a product is contracted at the market, the re-
sulting usage of the power grid has to be tested for ad-
missibility. Abarrategui, Marti and Gonzalez (2009)
perform a check for admissibility after market match-
ing, whereas Khattabi, H¨ubner, Kießling and Braun
(2012) propose a check before market matching to
adapt grid charges accordingly. In both concepts, sev-
eral grid calculations and load flow analyses have to
be performed. We expect, that for continuous energy
scheduling, these calculations cannot be performed in
any case for reasons of time constraints and lack of
(dynamic) information on the grid state. Neverthe-
less, the reconfiguration of units may lead to critical
grid states regarding utilization and remaining trans-
mission capacity of lines and transformers. Critical
grid states have been a topic in transmission grids for
a long time, and with more and more distributed gen-
eration this has to be reflected for the distribution grid
as well. Demand side management additionally may
aggravatethis as simultaneity factors may change dra-
matically as analyzed by Gwisdorf, Stepanescu and
Rehtanz (2010).
Therefore we propose to reflect the grid when set-
ting up a new schedule and to maximize the resem-
blance of the schedules regarding the utilization of the
grid, thus minimizing the risk for critical grid states,
when admissibility checks cannot be performed in
time.
The goals for rescheduling can be summarized as
follows:
• Deliver active power product as contracted,
• minimize additional costs emerging from
rescheduling and reconfiguration of units,
• maximize robustness of new cluster schedule and
• minimize changes in the usage of the power grid.
In the following sections a concept to reflect the
power grid related optimization target for continuous
energy scheduling is presented. As can be seen from
the goals above, this is part of a multi-criteria opti-
mization problem. We aim to define the grid related
optimization target as a separate target that does not
have dependencies to other targets, especially regard-
ing the number of reconfigurations (i.e. the number
of units that need to be adapted in their operating
behavior) needed: Weighting of the optimization tar-
gets might change over time, as – when there is still
enough time until product delivery – cost optimiza-
tion regarding the units might override robustness.
When the grid state is considered critical though, we
might prioritize these aspects over costs. Therefore
we want to decouple the grid related metric from the
other optimization targets.
3 RELATED WORK
This section deals with related work for rescheduling
of units in the distribution grid and - as a means to
achieve this - for analyzing the power grid using ap-
proaches from graph theory. An overview on related
work regarding dynamic aggregation of energy units
in the distribution grid is given by Nieße et al. (2012).
In contrast to the transmission grid, where a con-
tinuous measurement allows to detect violations of
grid operational constraints, no such infrastructure is
installed in the distribution grid, especially on the low
voltage level. Moreover, due to the large amount of
units in the distribution grid, the identification of the
most efficient unit to avoid a critical grid state can-
not be deduced manually. Additionally, the under-
lying optimization problem of identifying the most
efficient mitigation actions is challenging due to the
non-linearity and non-differentiability of the underly-
ing power flow equations as shown by Handschin, Re-
htanz, Wedde, Krause and Lehnhoff (2008). There-
fore, state-of-the-art control systems on the transmis-
sion level cannot be transferred directly to the lower
voltage levels due to (a) lack of real-time information
and (b) enlarged complexity of the redispatch prob-
lem.
In recent years, a lot of work has been done to
develop control schemes appropriate to the distribu-
tion grid structure that overcome these problems like
e.g. the work done by Krause and Lehnhoff (2012).
A generalized static state estimation method is pre-
sented that is valid for power grids with missing in-
put data. Neusel-Lange, Oerter and Zdrallek (2012)
SMARTGREENS2013-2ndInternationalConferenceonSmartGridsandGreenITSystems
24
present an approach for low voltage state identifi-
cation and control handling the problem of missing
data as well - the state estimation and control algo-
rithm presented adds prediction of loads and feed-
in for units lacking appropriate measurements. An
established algorithm for power flow can thus han-
dle real-time data and - if these are unachievable -
predicted values (Neusel-Lange et al., 2012). These
methods build on real-time information on the grid
state, adding up substitute values for missing data.
For the approach presented in this work, we try to
choose rescheduling options without real-time infor-
mation for two reasons: First, as Blank, Gerwinn and
Krause (2011) could show, identifying the most effi-
cient redispatch from the huge amount of possible dis-
patch options is in itself a complex task . It is not yet
clear how this approach could be integrated directly
in a multi criteria problem covering other constraints
like robustness and costs. Second, our concept is in-
tegrated in a market-based concept for active power
products from dynamic clusters of distributed energy
units. With the underlying process, a grid admissi-
bility check is performed after market matching. We
build on the results of that check and try to identify
schedules that resemble the initial schedules regard-
ing the grid usage using a graph-based approach.
The work of Barabasi and Albert (1999) and Al-
bert, Jeong and Barabasi (2000) regarding the struc-
tural analysis of complex networks using graph theory
has gained wide attention in the vulnerability anal-
ysis of power grids on the transmission level (Al-
bert et al., 2004), (Holmgren, 2006), (Hines et al.,
2010), (Schneider et al., 2011), (Chopade and Bik-
dash, 2011), (Wang et al., 2012). The transmission
grid is transferred to a graph representation with the
generators and loads as nodes in the graph and dif-
ferent concepts for generating the edges. Whereas
Holmgren (2006) and Chopade and Bikdash (2011)
generate the links as found in the grid topology,Hines
and Blumsack (2010)and Wang (2012) connect nodes
using the electrical distance of nodes to better re-
flect the engineering characteristics of the grid within
the graph structure by choosing a threshold to distin-
guish connected from unconnected nodes that yields
the known number of links (i.e. busses in the power
grid). The latter approach showed good results for
the vulnerability analysis of power grids using struc-
tural metrics like cluster coefficients or degree dis-
tribution. Dynamic effects in the transmission grids
have been analyzed by Kinney, Crucitti, Albert and
Latora (2005) for cascading failure analysis. They
added weights to the edges of a node representing the
efficiency of a line, with an efficiency of 0 prohibiting
paths using that line and 1 meaning full usage of that
line is possible. The efficiency concept and its trans-
fer to shortest path detection is discussed in detail in
section 4.2.
Nguyen, Kling and Ribeiro (2011) solved a dis-
tributed control task in the power distribution grid us-
ing the graph representation as described in Nguyen,
Kling and Myrzik (2010). The power distribution grid
is represented using a graph with the edges represent-
ing the lines in the grid. Using this representation,
an optimal power flow problem is solved in a distri-
bution grid scenario. Whereas the structural vulnera-
bility analysis has no need for generating a weighted
graph, in this study on the dynamic usage of the grid
weights are added to the edges reflecting the currently
measured power flows. So for this approach, detailed
system knowledge including both static and dynamic
data is required.
4 REFLECTING THE GRID
TOPOLOGY
As pointed out in section 3, power grids have been
modeled as graphs for several applications by assign-
ing a graph node to generating and power consuming
units to model the grid connection node. In this sec-
tion we apply and extend this concept in such a way,
that it can be used for rescheduling of energy clus-
ters with the optimization goal of identifying a sched-
ule that leads to a similar grid usage as the original
schedule. First, we pinpoint some design decisions
for modeling the power grid as a graph. After that,
a weighting function for edges in this graph is de-
veloped, that is needed to interrelate a change in the
schedule to a change in the usage of the power grid.
Using this extended model, the changed grid charac-
teristics of a new schedule are defined in section 5.
The power grid is transformed to an undirected
graph G = (V, E) with V = {v
1
, ..., v
n
} representing
the vertices (the grid connection nodes with the gen-
erating and consuming units annotated to that node)
and E = {e
1
, ..., e
n
} representing the edges between
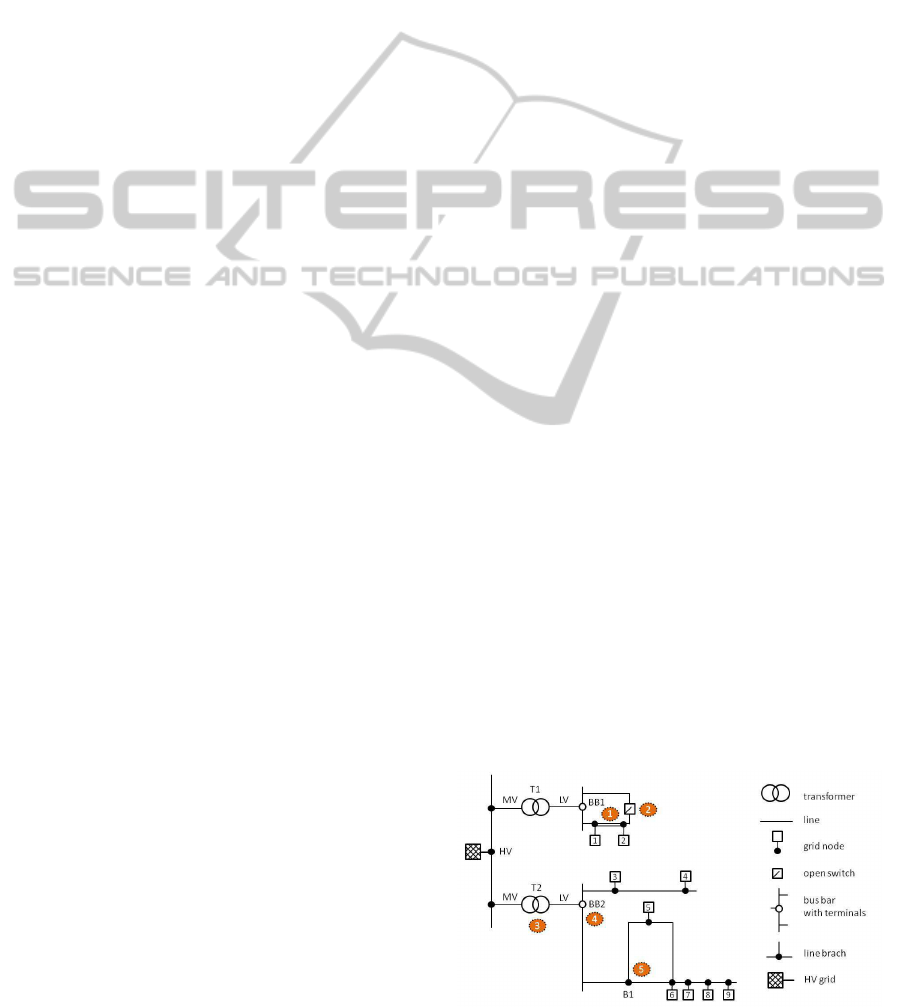
Figure 1: Simple example grid.
UsingGridRelatedClusterScheduleResemblanceforEnergyRescheduling-GoalsandConceptsforReschedulingof
ClustersinDecentralizedEnergySystems
25

this nodes, i.e. the lines of the power grid. A unit u
i
is
assigned to a node v
j
by the grid node assignment gn:
gn : U → V, gn(u
i
) = v
j
(7)
A simplified example of a medium voltage level
grid is shown in figure 1. The following design de-
cisions were chosen to generate the graph from this
matrix (enumeration refers to labeled number in fig-
ure 1):
1. Multiple Lines between Nodes. No multiple
edges are modeled. The edge between nodes
1 und 2 for example, probably strengthened by
adding a parallel line, is modeledas a simple edge.
2. Open Switches. Lines that are electrically dis-
connected by open switches are not modeled.
3. Voltage Level Transitions. Transformers are
modeled as separate nodes in the graph.
4. Bus Bars. Bus bars are modeled as nodes that
may be connected to several nodes in the graph.
Thus, the degree of node BB2 is deg(BB2) = 3,
whereas BB1 has deg(BB1) = 2, as no node will
be modeled between BB1 and the open switch
(see figure 1).
5. Line Branching. Line branching is modeled as
separate node. Branch B1 has a degree deg(B1) =
3.
As a consequence, we distinguish three types of nodes
that form the set V: Transformer nodes (set TN), bus
bar nodes (set BB) and normal grid nodes (set GN).
V = TN
[
BB
[
GN (8)
The artificial line branching nodes inserted in the
graph are defined as normal grid nodes.
4.1 Weighting Function
The weights added to an edge in the resulting graph
should allow to reflect the change of voltage levels in
paths to prevent schedules with compensation strate-
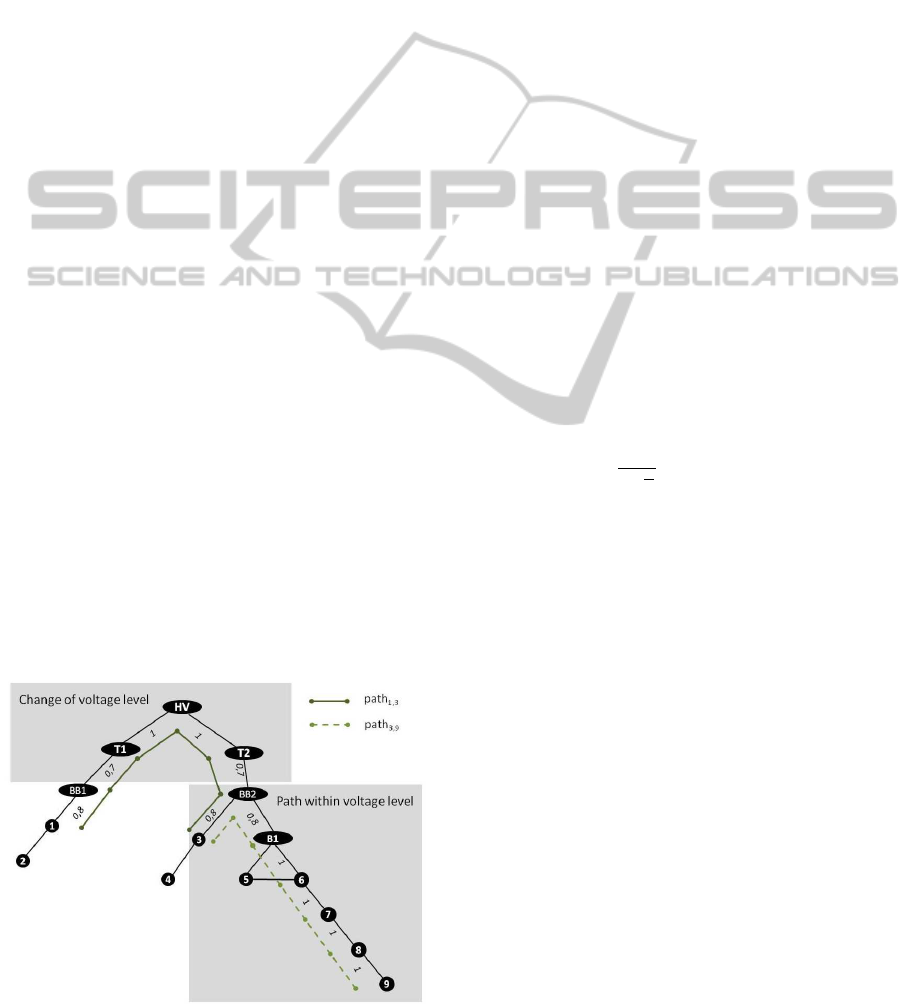
gies in completely different parts of the grid. In fig-
ure 2 this is illustrated with different paths within the
graph derived from the example grid in figure 1. We
take a closer look at path
1,3
and path
3,9
. Both paths
contain six edges. If only path length is considered,
the neighborhoodrelation between the nodes is identi-
cal. In power systems though, changes between volt-
age levels include conversion losses and - different
from social networks or other complex systems that
may be represented using graph theoretical concepts
- distance (edge length) matters. Using the electrical
distance for the weighting function has be done by
Nguyen, Kling and Ribeiro (Nguyen et al., 2011). We
propose a different approach that allows configuration
with less system information by defining weights for
different types of edges that can be adapted dynami-
cally.
An edge e = v
i
v
j
is of type
• cvl (change of voltage level), if v
i
∈ TN ∧v
j
∈ BB,
noted as e
cvl
, with E
cvl
= {e
cvl
= v
i
v
j
| v
i
∈ TN ∧
v
j
∈ BB},
• be (bus bar edge), if v
i
∈ BB∧v
j
∈ GN, noted as
e
be
, with E
be
= {e
be
= v
i
v
j
| v
i
∈ BB ∧ v
j
∈ GN},
• ne (normal edge), if (v
i
∈ GN ∧ v
j
∈ GN) ∨
(v
i
∈ TN ∧ v
j
∈ TN), noted as e
ne
, with E
ne
=
{e
ne
= v
i
v
j
| (v
i
∈ GN ∧ v
j
∈ GN) ∨ (v
i
∈ TN ∧
v
j
∈ TN)}
The time-dependent weighting function w assigns a
weight w
i
∈ [0, 1] to each edge from E depending on
time interval and edge type:
w : E × T
(p)
pr
→ [0, 1] (9)
subject to:
w
|E
cvl
(t
(i)
) = tw
i
(10)
w
|E
be
(t
(i)
) = bbw
i
(11)
w
|E
ne
(t
(i)
) = nw
i
(12)
denoting that the weighting function w might deliver
different values (either tw
i
, bbw
i
or nw
i
) depending
on the edge type subset of E(either E
cvl
, E
be
or E
ne
).
With this concept, in a system with dynamic informa-
tion (e.g. regarding power flow), the weighting func-
tion can be adapted dynamically to reflect properties
relevant for the actual phenomena in the power grid
analyzed. If no such information is given, a simple
static configuration can be chosen for tw
i
, bbw
i
and
nw
i
. Especially in distribution grids, where dynamic
measurement information on the grid and the units
connected to the grid cannot be retrieved, a static con-
figuration could help to approximate a reflection of
grid constraints. Some details on how these weights
should be chosen are given in the next section.
4.2 Neighborhood and Shortest Path
To identify the shortest path between two vertices, a
neighborhood function compliant with the following
requirements derived from the optimization goals for
continuous scheduling (see section 2.3) is needed:
1. Requirement 1 – Distinguish Local and Wide-
area Compensation. Paths within the same volt-
age level that differ in the number of edges should
be differentiated by the neighborhood function.
With this requirement, local compensation of in-
cidents (e.g. at the neighboring node) should be
SMARTGREENS2013-2ndInternationalConferenceonSmartGridsandGreenITSystems
26
distinguishable from wide-area compensation. In
the example given in 1, an incident occurring at
node 8 should preferably get compensated at node
7 or 9.
2. Requirement 2 – Transition of Voltage Levels.
Paths that have the same number of contained
edges should be distinguishable if they differ re-
garding the voltage level profile. Thus it should
be possible to prefer new schedules that compen-
sate incidents within the same voltage level of a
distribution grid or vice versa.
3. Requirement 3 – Allow Exclusion of Single
Lines. It should be possible to set the weight of
single edges in such a way that all paths using this
edge are prohibited for scheduling. Thus, conges-
tion management with both spatial and temporal
differentiation should be possible.
To reflect requirement 2 (transition of voltage levels),
the following has to be valid when choosing values
for the weights tw
i
, bbw
i
and nw
i
for all time intervals
t
(i)
:
tw
i
≤ bbw
i
< nw
i
(13)
Choosing the same weight for tw
i
and bbw
i
is pos-
sible, but preferring paths within one voltage level
(requirement 2) can only be done when the normal
edges’ weight is greater than the bus bar crossing and
transformer edges’ weight.
A weight of 0 annotated to an edge depicts that
the line represented by this edge is prohibited for
rescheduling (requirement 3), i.e. the parts of the
graph that can only be reached using this edge must
not be affected by rescheduling.
For the upcoming examples, the following
weights are chosen for the different edge types: tw
i
=
0.7, bbw
i
= 0.8, nw
i
= 1.0 for all time intervals t
(i)
.
Figure 2 illustrates different paths with these
weights annotated to the edges.
Figure 2: Exemplary paths with weights and voltage levels.
The set of paths between v
i
and v
j
Path
(i, j)
is de-
fined as follows:
Path
(i, j)
= {(v
i
, v
i+1
, ..., v
j
) |
∃ x : e
m
= v
x
v
x+1
∈ E, i ≤ x < j}
(14)
A specific path is therefore an element from this set.
path
(i, j),k
∈ Path
(i, j)
(15)
To define distinct paths in the graph, paths have to be
defined by naming the series of incident nodes in the
path. To simplify this for the upcoming examples, we
define some paths used in the text as follows with the
notation path
i, j
:
path
1,3
: 1 - BB1 - T1 - HV - TN - BB2 - 3
path
3,9
: 3 - BB2 - B1 - 6 - 7 - 8 - 9
path
B1,9
: B1 - 6 - 7 - 8 - 9
path
6,9
: 6 - 7 - 8 - 9
Within definitions, we will use the notation
path
(i, j),k
so that we can distinguish different paths
between v
i
and v
j
by k where needed.
We propose the harmonic composition w
harm
of all
weights of the edges contained in the path to evaluate
neighborhood as used by Kinney et al. for power grid
graph analyses (Kinney et al., 2005). The harmonic
composition of a set of numbers X = {x
1
, x
2
, ..., x
n
} is
defined as
w
harm
(X) =
(
0 ∀X : ∃x ∈ X : x = 0
1
∑
n
i
1
x
i
else
(16)
In table 1 the harmonic composition is compared
to arithmetic mean and harmonic mean for example
paths in the example grid. We do not compare the har-
monic composition to simply summing up the weights
of the edges, as requirement 3 (exclusion of single
lines) cannot be fulfilled by such an approach.
The above example of paths path
1,3
and path
3,9
illustrates, that requirement 2 is fulfilled using this
metric: w
harm
(path
1,3
) = 0.136. The neighborhood
value of path
3,9
is w
harm
(path
3,9
) = 0.154. Thus, a
path within the same voltage level can be differen-
tiated from a path crossing voltage levels as long as
the weights are differentiated as shown above. This
metric is defined 0 if the weight of one of the con-
tained edges is set to 0 (requirement 3). Therefore this
metric shows advantages to the arithmetic mean that
would not reflect this aspect. Further, the harmonic
composition reflects the number of edges within the
path (requirement 1) not reflected by arithmetic or
harmonic mean: With each weight of edges set to
1.0, a path with 3 edges (e.g. path
6,9
) would yield
w
harm
(path
6,9
) = 0.333, whereas a path with 4 edges
(e.g. path
B1,9
) would yield w
harm
(path
6,9
) = 0.25.
UsingGridRelatedClusterScheduleResemblanceforEnergyRescheduling-GoalsandConceptsforReschedulingof
ClustersinDecentralizedEnergySystems
27

Table 1: Metric comparison for exemplary paths.
path
1,3
path
3,9
path
6,9
path
B1,9
# edges 6 6 3 4
arithm. 0.833 0.933 1 1
harm. 0.816 0.923 1 1
w
harm
0.136 0.154 0.333 0.25
The neighborhood value neigh
(i)
i, j
of two nodes v
i
and v
j
on path
(i, j),k
in time interval t
(i)
is therefore
defined as follows (please note that the neighborhood
definition is time-dependent, as the weighting func-
tion used is time-dependent as well):
neigh
(i)
i, j
(path
(i, j),k
) = w
harm
(W
(i)
path
(i, j),k
) (17)
where:
W
(i)
path
(i, j),k
= {w(e
m
,t
(i)
) |
∃ x : e
m
= v
x
v
x+1
∈ E, i ≤ x < j}
(18)
The shortest path sp
i, j
between nodes v
i
und v
j
at
time interval t
(i)
is now defined as the path with the
highest neighborhood value following equation 17:
path
(i, j),k
= sp
(i)
i, j
(19)
subject to:
∀path
(i, j),m
, m 6= k :
neigh
(i)
i, j
(path
(i, j),m
) < neigh
(i)
i, j
(path
(i, j),k
)
(20)
4.3 Adding the Grid View to Cluster
Schedules
To analyze the change in power grid usage with a new
cluster schedule, we first have to translate it to a node
related schedule that aggregates the power behavior
of units to the node they are assigned to. We define
the node related schedule ns
v
for each time interval as
follows:
ns : T− > R, ns
v
(t
(i)
) =
∑
u
k
∈C
e
(i)
u
k
(21)
subject to (see definition 7):
gn(u
k
) = v (22)
Let NS be the set of all node schedules for a clus-
ter (i.e. nodes with units within the cluster), then the
cluster node schedule cns maps a node to its node
schedule:
cns : V → NS, cns(v
i
) = ns
v
i
(23)
In the example grid, a maximum of one unit is as-
signed to each node for the sake of conceptual clarity.
Unit and node can thus be referred to with the same
number in the explaining text. Therefore, the energy
entries in the cluster schedules are equivalent to the
cluster node schedule throughout the rest of this pa-
per.
5 USING GRID RELATED
CLUSTER SCHEDULE
RESEMBLANCE FOR ENERGY
RESCHEDULING
With the grid characteristics of a cluster schedule as
defined in the last section, an optimized rescheduling
can reflect grid characteristics besides other optimiza-
tion goals as costs and robustness. To implement this,
we define grid-related resemblance of cluster sched-
ules and give an example of how this can be used to
choose a new cluster schedule from a set of possible
rescheduling options.
5.1 Rescheduling and Comparison of
Grid Characteristics
We define two cluster schedules to be grid-related
identical, if their cluster node schedules are identical,
i.e. rescheduling only affects units assigned to the
same grid node.
The grid-related cluster schedule resemblance
gr(cs
∗
) of a new cluster schedule cs
∗
with the original
cluster schedule cs is defined as follows (with v
inc
as
node where at least one unit affected by an incident
is connected and sp
inc,k
as shortest path between v
inc
and v
k
as defined in definitions 19 and 20):
gr(cs
∗
) =
∑
t
(i)
∈T
(p)
pr
∑
v
k
∈G
β
i
· w
(i)
inc,k
∑
β
i
(24)
where:
w
(i)
inc,k
= neigh
(i)
inc,k
(sp
(i)
inc,k
) · |ns
(i)
v
k
− ns
∗(i)
v
k
| (25)
The dynamic weighting factor β
i
can be used to
reflect time intervals within a day where schedule de-
viations are considered more critical. For the rest of
this paper β
i
is set to 1 for all time intervals and thus
has no effect. The evaluation on the effect of this fac-
tor is subject to future work.
SMARTGREENS2013-2ndInternationalConferenceonSmartGridsandGreenITSystems
28
5.2 Example: Choosing a New Cluster
Schedule using Grid-related Plan
Resemblance
For the grid example given above, an original
cluster schedule was chosen for the cluster C =
{u1, u2, u3, u6, u7, u8} for one time interval. For this
interval, an incident occurs at unit 2 decreasing the
original power production from 4 to 1. In table 2,
an excerpt of possible new schedules is given. All
of these possible new cluster schedules fulfill the re-
quirement, that power delivery sums up to 25. In
figure 3 and figure 4 the units compensating the in-
cident when using schedules 1 or 2 are marked to
illustrate the topological dimension of the schedule
change. Please note, that the energy related change in
the schedule can only be deduced from table 2. Both
dimensions are used for grid related cluster schedule
resemblance.
Table 2: Original and potential new cluster schedules.
orig sched1 sched2 sched3 sched4
u2 4 1 1 1 1
u1 1 4 3 3 3
u3 4 4 1 5 4
u6 6 6 6 6 6
u7 5 5 8 5 5
u8 5 5 6 5 6
∑
25 25 25 25 25
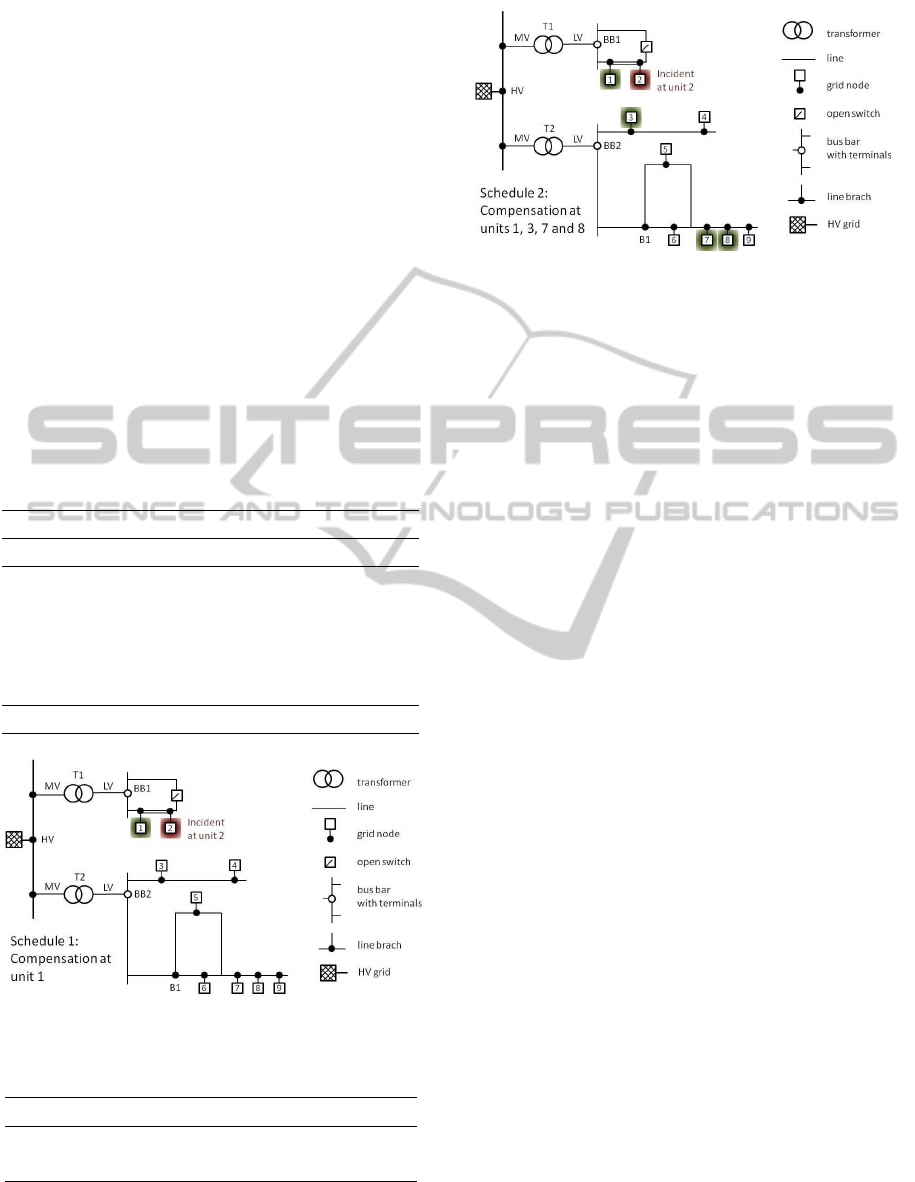
Figure 3: Following schedule 1 a directly neighbored unit
is used to compensate the incident at unit 2.
Table 3: Characteristics of new cluster schedules.
sched1 sched2 sched3 sched4
# reconf. 1 4 2 2
gr(cs
∗
) 0.6 0.533 0.421 0.416
The grid related cluster schedule resemblance as
defined in equation 24 is listed in table 3. Schedule 1
compensates the incident at unit 2 occurring at node
Figure 4: With schedule 2 the incident at unit 2 would get
compensated by several units located even in a separate LV
grid.
2 at the directly neighbored node 1 using unit 1 with-
out crossing more than one edge and within the same
voltage level (see figure 3). This plan has the highest
grid-related cluster schedule resemblance. Schedule
2 (see figure 4) has the highest number of reconfig-
urations, but grid resemblance is high nevertheless.
Schedules 3 and 4 come with a small number of re-
configurations but compensate with stark changes at
the most distant grid nodes. It can be seen, that grid
related cluster schedule resemblance decouples the
amount of reconfigurations needed for compensation
(as a cost-relevant aspect) and grid characteristics of
a plan.
6 CONCLUSIONS AND FUTURE
WORK
In this paper we propose grid-related cluster schedule
resemblance as a new metric to compare schedules
for clusters of distributed energy generators and con-
sumers regarding their grid usage profile changes. It
was shown that this metric can decouple the amount
of reconfigurations needed for compensation (as a
cost-relevant aspect) and grid characteristics of a plan.
Therefore grid related cluster schedule resemblance
can be used as a separate optimization target in the
multi-criteria optimization problem of energy cluster
rescheduling that deals with costs and other targets as
well.
In future work we will compare the results from
this metric with conventionalload flow calculations to
evaluate, if the schedules chosen using the metric lead
to less critical grid operation regarding operational
constraints of transformers and lines. If the metric
developed in this work thus shows to be appropriate
as a means to reflect grid constraints in reschedul-
ing distributed energy units, we will apply this ap-
proach to evaluate multi-dimensional schedules e.g.
for rescheduling of clusters active on day-ahead mar-
UsingGridRelatedClusterScheduleResemblanceforEnergyRescheduling-GoalsandConceptsforReschedulingof
ClustersinDecentralizedEnergySystems
29

kets combined with cost and robustness. We will inte-
grate this optimization in a distributed constraint op-
timization problem to adapt schedules to unforeseen
incidents on distributed power generation and usage.
ACKNOWLEDGEMENTS
The Lower Saxony research network ‘Smart Nord’
acknowledges the support of the Lower Sax-
ony Ministry of Science and Culture through the
“Nieders¨achsisches Vorab” grant programme (grant
ZN 2764).
Furthermore, we thank Sebastian Lehnhoff and
the anonymous reviewers for helpful comments to im-
prove this paper.
REFERENCES
Abarrategui, O., Marti, J., and Gonzalez, A. (2009). Con-
structing the Active European Power Grid. In Pro-
ceedings of WCPEE09, pages 1–4, Cairo.
Albert, R., Albert, I., and Nakarado, G. L. (2004). Struc-
tural Vulnerability of the North American Power Grid.
Physical Review E, 69(025103(R)):1–10.
Albert, R., Jeong, H., and Barabasi, A. (2000). Error
and attack tolerance of complex networks. Nature,
406(6794):378–82.
Barab´asi, A. and Albert, R. (1999). Emergence of Scaling
in Random Networks. Science, 286(5439):509–512.
Bitsch, R., Feldmann, W., and Aumayr, G. (2002). Virtuelle
Kraftwerke - Einbindung dezentraler Energieerzeu-
gungsanlagen. etz, 9.
Blank, M., Gerwinn, S., Krause, O., and Lehnhoff, S.
(2011). Support vector machines for an efficient repre-
sentation of voltage band constraints. 2011 2nd IEEE
PES International Conference and Exhibition on In-
novative Smart Grid Technologies, pages 1–8.
Bundesnetzagentur (2012). Amtsblatt 21/2012 der Bun-
desnetzagentur, Beschluss BK6-12-024.
Chopade, P. and Bikdash, M. (2011). Critical infrastructure
interdependency modeling: Using graph models to as-
sess the vulnerability of smart power grid and SCADA
networks. 2011 8th International Conference & Expo
on Emerging Technologies for a Smarter World, pages
1–6.
Dimeas, A. L. and Hatziargyriou, N. (2007). Agent based
control of Virtual Power Plants. In Internation Con-
ference on Intelligent System Applications to Power
Systems, pages 1–6, Toki Messe, Niigata.
Gandor, M., Blank, M., and Lehnhoff, S. (2012). Reconfig-
uration Strategies for Electrical Devices for Operation
within Feasibility Margins. In VDE-Kongress 2012
Smart Grid, Stuttgart. VDE Verlag GmbH.
Gwisdorf, B., Stepanescu, S., and Rehtanz, C. (2010). Ef-
fects of Demand Side Management on the Planning
and Operation of Distribution Grids. In Innovative
Smart Grid Technologies Conference Europe (ISGT
Europe), 2010 IEEE PES.
Handschin, E., Rehtanz, C., Wedde, H. F., Krause, O., and
Lehnhoff, S. (2008). On-line stable state determi-
nation in decentralized power grid management. In
Proceedings of the 16th Power Systems Computation
Conference (PSCC’08), pages 07–14, Glasgow, Scot-
land, UK.
Hines, P., Blumsack, S., Sanchez, E. C., and Barrows, C.
(2010). The Topological and Electrical Structure of
Power Grids. 2010 43rd Hawaii International Con-
ference on System Sciences, pages 1–10.
Holmgren, A. J. (2006). Using graph models to analyze the
vulnerability of electric power networks. Risk anal-
ysis : an official publication of the Society for Risk
Analysis, 26(4):955–69.
Jansen, J. C., van der Welle, A., and Nieuwenhout, F.
(2008). The virtual power plant concept from an eco-
nomic perspective: updated final report. Technical Re-
port 0.
Khattabi, M., H¨ubner, C., Kießling, A., and Braun, M.
(2012). Distribution grid automation as the basis for
the smart energy system of the future. In VDE, edi-
tor, VDE-Kongress 2012 Smart Grid, Stuttgart. VDE
Verlag.
Kinney, R., Crucitti, P., Albert, R., and Latora, V. (2005).
Modeling cascading failures in the North Ameri-
can power grid. The European Physical Journal B,
46(1):101–107.
Kok, K. (2010). Multi-Agent Coordination in the Elec-
tricity Grid , from Concept towards Market Introduc-
tion. In Ninth Conference on Autonomous Agents and
Multiagent Systems AAMAS 2010, pages 1681–1688,
Toronto, Canada.
Kok, K., Warmer, C., Kamphuis, R., Mellstrand, P., and
Gustavsson, R. (2005). Distributed Control in the
Electricity Infrastructure. In Proceedings of the Inter-
national Conference on Future Power Systems, 2005.
Krause, O. and Lehnhoff, S. (2012). Generalized Static-
State Estimation. In 22nd Australasian Universities
Power Engineering Conference (AUPEC).
Neusel-Lange, N., Oerter, C., and Zdrallek, M. (2012).
State Identification and Automatic Control of Smart
Low Voltage Grids. In Proceedings of the 3rd IEEE-
PES-Conference ”Innovative Smart Grid Technolo-
gies” Europe 2012, pages 1–6, Berlin, Germany.
Nguyen, P. H., Kling, W. L., and Myrzik, J. M. A. (2010).
An application of the successive shortest path algo-
rithm to manage power in multi-agent system based
active networks. European Transactions on Electrical
Power, 20(8):1138–1152.
Nguyen, P. H., Kling, W. L., and Ribeiro, P. F. (2011).
Agent-based power routing in Active Distribution
Networks. 2011 2nd IEEE PES International Confer-
ence and Exhibition on Innovative Smart Grid Tech-
nologies, pages 1–6.
Nieße, A., Lehnhoff, S., Tr¨oschel, M., Uslar, M., Wiss-
ing, C., Appelrath, H.-J., and Sonnenschein, M.
(2012). Market-based self-organized provision of ac-
tive power and ancillary services: An agent-based ap-
proach for Smart Distribution Grids. In Complexity in
Engineering (COMPENG), 2012, Aachen.
SMARTGREENS2013-2ndInternationalConferenceonSmartGridsandGreenITSystems
30

Ramchurn, S. D., Vytelingum, P., Rogers, A., and Jennings,
N. R. (2012). Putting the Smarts into the Smart Grid :
a Grand challenge for artificial intelligence. Commu-
nications of the ACM, 55(4):86–97.
Schneider, C. M., Ara, N. A. M., Havlin, S., and Herrmann,
H. J. (2011). Towards designing robust coupled net-
works. pages 1–7.
VDE (2011). VDE-AR-N 4105: Erzeugungsanla-
gen am Niederspannungsnetz - Technische Min-
destanforderungen f¨ur Anschluss und Parallelbetrieb
von Erzeugungsanlagen am Niederspannungsnetz.
Wang, Y., Zhao, J., Zhang, F., and Lei, B. (2012). Study on
structural vulnerabilities of power grids based on the
electrical distance. IEEE PES Innovative Smart Grid
Technologies, pages 1–5.
UsingGridRelatedClusterScheduleResemblanceforEnergyRescheduling-GoalsandConceptsforReschedulingof
ClustersinDecentralizedEnergySystems
31
