
Energy-based Metric for the Routing Protocol in Low-power and Lossy
Network
Patrick Olivier Kamgueu
1
, Emmanuel Nataf
2
, Thomas Djotio
1
and Olivier Festor
2
1
University of Yaounde I, LIRIMA - Masecness Project, Yaound´e, Cameroon
2
Universit´e de Lorraine, INRIA - Madynes Project, Nancy, France
Keywords:
Routing, Energy Efficiency, RPL, Wireless Sensor Network.
Abstract:
Saving power while ensuring acceptable service levels is a major concern in wireless sensor networks, since
nodes are usually deployed and not replaced in case of breakdown. Several efforts have recently led to the
standardization of a routing protocol for low power and lossy network. The standard provides various metrics,
which can be used to guide the routing. Most protocol implementations use expected transmission count as
routing metric, thus focus on the link reliability. To our knowledge, there is no protocol implementation that
uses nodes remaining energy for next hop selection. This paper discusses the usage of the latter as a routing
metric for the Routing Protocol in Low power and Lossy Networks (RPL). We design an objective function
for that metric and compared experiments result with the most popular expected transmission count scheme.
1 INTRODUCTION
Wireless Sensor Networks (WSN) consist of up to
hundreds or thousands nodes scattered in an environ-
ment of interest, where nodes and their interconnec-
tion are constrained. Nodes discover their neighbors,
self-organize to build a topology and route sensed
data towards a central point: the sink. To deal with
challenge presented by low power and lossy net-
works, the IETF Roll Working Group has recently
published several standards related to RPL (Winter,
2012; Vasseur et al., 2012).
RPL organizes network as one or more Directed
Acyclic Graph (DAG), each one rooted at a single
point : the DAG root. Topology construction begins
at this node, which periodically sends a Destination
Oriented DAG Information Object (DIO) via link lo-
cal multicast. DIO carries necessary informations to
build the topology, including root unique identifier,
routing metrics, originating router’s depth called rank,
and other network parameters. Nodes in the vicinity
receiving DIOs, join the DAG by selecting their par-
ents (one or more) as next hop upwards to the sink.
Parent selection process is governed by an Objective
Function (OF), which uses routing metrics to select
node’s preferred parent among neighbors. Different
criteria also called routing metrics (Vasseur et al.,
2012) are defined to capture node or link character-
istics on the path for parent selection. They could
be a node attribute: hop count, node residual energy,
or a link attribute : throughput, latency, link quality
level or expected transmission count (ETX). In this
paper, using an online real time battery level estima-
tion model, we design an OF for RPL that used node
remaining energy as metric. The proposed OF is com-
pared against the existing that rely on ETX.
The remainder of the document is organised as
follows. In the next section we describe energy-based
OF characteristics in terms of node battery level es-
timation, path cost and node rank computation. Sec-
tion 3 presents some related work on energy aware
routing. Implementation parameters, simulations and
results are discussed in section 4. Section 5 concludes
our work and discusses future directions.
2 ENERGY-BASED OBJECTIVE
FUNCTION
2.1 Node’ Battery Level Estimation
To predict the lifetime of the node, we use a well-
known battery model proposed by (Rakhmatov and
Vrudhula, 2003). It uses the current consumption dur-
ing each node state and its duration to estimate the
battery remaining energy. The model is very accu-
rate and cannot be implemented on real sensor nodes
145
Kamgueu P., Nataf E., Djotio T. and Festor O..
Energy-based Metric for the Routing Protocol in Low-power and Lossy Network.
DOI: 10.5220/0004313401450148
In Proceedings of the 2nd International Conference on Sensor Networks (SENSORNETS-2013), pages 145-148
ISBN: 978-989-8565-45-7
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

due to its complex computations and the memory size
requirements. (Rahm´e and Fourthy, 2010) have ap-
proximated the latter by simple computations on low
memory to fit into sensor nodes, while maintaining
the original model accuracy. Based on these approx-
imations, we implemented this model on real sensor
nodes, with the possibility to predict their lifetime on-
line (Nataf and Festor, 2013). Following RPL metrics
recommendations(Vasseur et al., 2012), node resid-
ual energy is estimated on a scale of 255 (full) to 0
(empty).
2.2 Energy-based Path Cost
Computation
Path cost is a scalar value representing link or node
characteristics for which it expresses some quality
level along end-to-end path. Its calculation depends
on the metric chosen by the network operator. After a
node has calculated the path cost for all its neighbors
and chose the best parent in regard of the relation or-
der for the selected metric, node updates its metric
container (by computing its path through that parent)
and starts to send its proper DIO. We consider the path
cost PW
i
from a node i to the sink as the minimum
value between the preferred parent path cost and its
own energy. At the sink node, this cost is set as the
energy value of node. A node selects the neighbor
that advertises the greatest path cost value as parent.
More formally:
PW
i
= min[max
j∈N
i
(PW
j
),E
i
] (1)
Where N
i
is the set of node i’s neighbors toward the
sink, and E
i
represents the energy of node i. For a
given path, the cost value is also the same as the min-
imum node’s energy level encountered on that path,
since this energy is critical for the route lifetime. Net-
work topology shown in figure 1 depicts the proposed
energy-based path cost. Node 1 is the sink, and is
Figure 1: Path cost and DAG Rank calculation.
main powered, other nodes at a given time are sup-
posed to have residual energy as shown. Dashed lines
and arrows represent neighbor reachability. Consid-
ering the figure, node 6 receives respectively values
PW
3
= 200, PW
4
= 210, PW
5
= 212, and PW
8
= 235.
So node 6 selects 4, as best parent. Similarly, other
nodes select their next hop to the sink.
2.3 Energy-based DAG Rank
To avoid cycle in the network, every node uses a
scalar value: the rank, to record its relative position
to other nodes with regard to DODAG root. Rank
value must monotonically decrease as we move up-
wards to the sink, but it does not necessarily change
as fast as some link or node metrics would. For this
reason, rank value is thought as a fixed-point num-
ber where the position of the radix point between the
integer part and the fractional part is determined by
the
MinHopRankIncr
parameter. When rank is com-
pared for parent relationships or loop detection pur-
pose, only the integer part is used, but OF computes
entire fixed-point value (16-bit). Once a node (say N)
has chosen its preferred parent (P), node computes its
own rank from preferred parent’s rank as defined in
(2) where step = MAX
energy
− Node
energy
.
Rank(N) = Rank(P) + Rank
incr
with Rank
incr
= step+ MinHopRankIncr
(2)
This formula ensures the monotonicity property of
the rank which increases by at least one point
(
MinHopRankIncr
) between node and its preferred
parent, when child node has a full battery level. The
increment is even greater as node consumes its bat-
tery, because of penalty of step which feeds the frac-
tional part of fix-point rank value. By cumulative ef-
fect of penalties in the node’s parentage, node’s rank
can grow to more than one point as shown in figure
1 (rank increase between node 5 and 7). Root rank is
set to the same value as
MinHopRankIncr
(256 in this
example).
3 RELATED WORK
Among techniques used to maximize the network life-
time, energy aware routing protocols appear to be
suitable for multi-hop wireless sensor networks, since
they explicitly take into account node residual en-
ergy for route establishment. EESP (Shivaprakasha
and Kulkarni, 2011) follows shortest path algorithm
by combining distance and node residual energy as
cost. Similarly, (Mohajerzadeh and Yaghmaee, 2009)
proposed an algorithm which considers both energy
and delay metric to find an optimal path. (Chiang
et al., 2007) proposed Minimum Hop (MH) routing
SENSORNETS2013-2ndInternationalConferenceonSensorNetworks
146

protocol which organize routing topology based on
nodes hop counts and battery power levels. For a
given node, neighbors are classified into three cate-
gories: parent, sibling and child node, on the basis
of their vicinity in hop count to the sink, respectively
one less, same, and one more than that of the send-
ing node. MH first tries to reach sink by path through
a parent node, which guarantee a min hop path. In
case of more than one parent, the protocol uses the
one with the highest energy level. If there is no parent
node available, the sender forwards data through the
sibling node with the highest energy level. MH uses
a local (parent or sibling) energy view of the sender
for next hop selection, and does not always reflect the
real energy distribution of node in the path. On con-
trary, (El-Semary and Azim, 2010) proposed the path
energy weight protocol that improve MH by using an
energy-weightedfunction, to indicate how balanced is
the energy among all nodes along a given path. This
path weight takes into account all nodes energy along
the path, although greatly disadvantaging lower en-
ergy nodes. In our approach only the lowest node
energy constrained the path. All previous protocols
improve the average energy consumption in the net-
work compared to a solely hop count-based protocol.
Their major difference is that, they use the later as
main criterion for next hop selection, node’s energy
level is usually used to break the tie. We do present
another scheme, namely one that favors node energy
on a routing standard for WSN, while using the rank
notion to avoid routing loops.
4 SIMULATIONS AND RESULTS
4.1 Environment Setup
Experiments were carried out using Cooja simulator
(Osterlind and Dunkels, 2006). Network topology is a
300×300m
2
2D-grid of 20 sensors, the sink is located
at the upper left corner. Each sensor node acts in a
120m maximum transmission range with 140m inter-
ference range, and periodically sends data to the sink
using UDP as the transportlayer with a Tx/Rx success
ratio of 80%. The layer 2 medium access control is
ContikiMAC (Dunkels, 2011) that provides power ef-
ficiency by the node keeping their radios turned offfor
roughly 99% of the time. All nodes have full battery
charge at the beginningof the simulations, with an ini-
tial power level set to 880mAh. The hardware charac-
teristics for the simulation computer are 3.2Ghz Dual
Core Intel XEON processor board, with 8GiB Mem-
ory size, on Ubuntu 11.10 operating system.
4.2 Results
Simulations were performed for one month network
activities (corresponding to 13 real days on our sim-
ulation computer). We define the network lifetime
as the date on which the first node has completely
exhausted its battery (Dietrich and Dressler, 2009).
The energy aware RPL implementation was com-
pared against the ETX implementation. For both,
the sink collects data generated at various through-
put expressed as the number of application packets
per minute (pkts/min), each having 87 bytes of size.
Then, we evaluate energy depletion and packet deliv-
ery ratio for both scenarios, one at 1pkt/min, the other
at 6pkts/min.
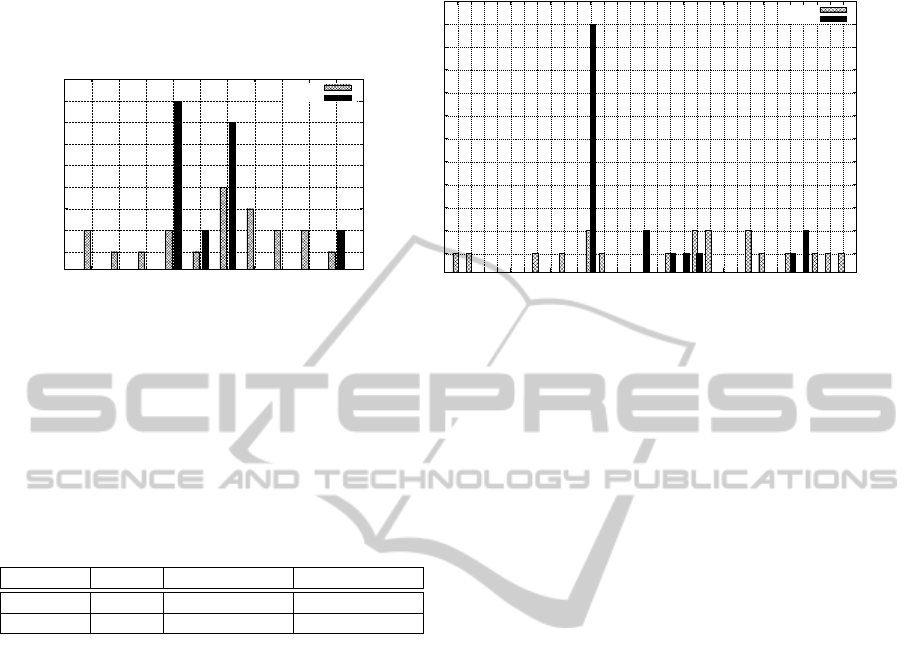
4.2.1 Remaining Power Distribution
Energy aware routing aims to use nodes with higher
remaining power level, thus these nodes drain their
battery more quickly and further become less attrac-
tive to relay data. The network should be reorganized
to find more interesting nodes for routing and so on,
thereby a balancing on all nodes battery levels should
occur. This can be seen in figure 2 which presents
the proportion of nodes in the network with the cor-
responding percentage of remaining energy at the end
of the simulation. In figure 2a at 1pkt/min, 85% of
nodes have the power level between the range 54%
to 56%, whereas the ETX-based routing spread the
energy distribution unequally among the nodes. At
a higher rate (6pkts/min) in figure 2b, this observa-
tion is much more pronounced, since the traffic flow is
more important and nodes exhaust their battery much
faster. At the same time, in both illustrations the
ETX-based scheme presents much less-power nodes
(around 20%) than the energy aware scheme, the lat-
ter delaying the first nodes that will completely ex-
haust their battery and the possibility to create net-
work holes. This is an important point, because the
network integrity can be affected when some nodes
are stopped. We estimated by a linear regression when
first nodes drain completely their energy. Computa-
tions indicate a network lifetime of 35 days for ETX-
based RPL, while 40 days for energy aware scheme,
thus the increase in network lifetime is around 14%.
4.2.2 Transmission Accuracy
We also evaluated the accuracy of routing to collect
the application data. The table 1 highlights the to-
tal number of received packets at the sink for both
rates. ETX-based routing promotesroutes with higher
packets delivery ratio, while energy aware routing
don’t care on that. It is therefore not surprising that
Energy-basedMetricfortheRoutingProtocolinLow-powerandLossyNetwork
147
5
10
15
20
25
30
35
40
45
51 52 53 54 55 56 57 58 59 60
Nodes (%)
Remaining Energy (%)
Throughput: 1pkt/min
ETX
Energy
5
10
15
20
25
30
35
40
45
50
55
60
22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51
Nodes (%)
Remaining Energy (%)
Throughput: 6pkts/min
ETX
Energy
(a) (b)
Figure 2: Nodes Remaining Power Distribution.
the number of received packets with ETX is slightly
greater than energy aware scheme as outlined by the
table, but this delivery ratio difference between these
two schemes is minimal (only around 3%).
Table 1: Transmission Accuracy.
Throughput Sent Pkt Received (ETX) Received (Energy)
6 pkts/min 4488635 4390282 (97.80%) 4251962 (94.72%)
1 pkt/min 748105 735680 (98.34%) 722394 (96.56%)
5 CONCLUSIONS AND FUTURE
WORKS
In this paper, we presented an instantiation and im-
plementation of the routing protocol for low power
and lossy network that uses the node’s remaining en-
ergy as the main routing metric. The implementation
makes use of a well-known battery theoretical model
from which we estimate at runtime the node battery
lifetime for routing. Experiments reveal that, com-
pared to the popular RPL ETX-based scheme, the pro-
posed implementation increase the network lifetime
and distributes energy evenly among nodes without
an appreciable lack of the transmission accuracy.
Our future works aims to combinate these both
metrics (energy and ETX), in accordance with (Za-
hariadis and Trakadas, 2012). We expect to leverage
the strengths of each, and obtain a better compromise.
Furthermore we seek to provide additional decision
criteria in order to better guide the routing decisions
in WSN.
REFERENCES
Chiang, S., Huang, C., and Chang, K. (2007). A minimum
hop routing protocol for home security systems using
wsn. IEEE Trans. on Cons. Elec., 53:1483 – 1489.
Dietrich, I. and Dressler, F. (2009). On the lifetime of wsn.
ACM: Trans. on Sensor Networks, 5.
Dunkels, A. (2011). The contikimac radio duty cycling pro-
tocol. Technical Report ISBN 1100-3154, SICS.
El-Semary, A. M. and Azim, M. M. A. (2010). Path energy
weight: A global energy-aware routing protocol for
wireless sensor network. In Proc. of IFIP WD, Venice.
Mohajerzadeh, A. and Yaghmaee, M. (2009). An efficient
energy aware routing protocol for real time traffic in
wsn. In Proc. of ICUMT, pages 1 – 9, St-P, Russia.
Nataf, E. and Festor, O. (2013). Online estimation of battery
lifetime for wireless sensors network. In Proc. of 2nd
Sensornets, Barcelona, Spain.
Osterlind, F. and Dunkels, A. (2006). Cross-level sensor
network simulation with cooja. In Proc. of 31st IEEE
Conf. SenseApp, pages 641 – 648, Tampa, Florida.
Rahm´e, J. and Fourthy, N. (2010). Energy management for
battery-powered embedded systems. In Proc. of IEEE
WCNC, pages 277 – 324, Sydney.
Rakhmatov, D. and Vrudhula, S. (2003). Energy manage-
ment for battery-powered embedded systems. ACM
trans. on Embed. Comput. Syst, pages 277 – 324.
Shivaprakasha, K. S. and Kulkarni, M. (2011). Energy effi-
cient shortest path routing protocol for wsn. In Proc.
of 3rd CICSyN, pages 333 – 337, Bali, Indonesia.
Vasseur, J., Kim, M., Pister, K., Dejean, N., and Barthel, D.
(2012). Routing metrics used for path calculation in
low-power and lossy networks. Number 6551 in RFC.
Winter, T. (2012). Rpl: Ipv6 routing protocol for low-power
and lossy networks. Number 6550 in RFC.
Zahariadis, T. and Trakadas, P. (2012). Design guidelines
for routing metrics composition in lln. IETF Work in
progress.
SENSORNETS2013-2ndInternationalConferenceonSensorNetworks
148
