
Detection and Classification of Facades
Panagiotis Panagiotopoulos and Anastasios Delopoulos
Information Technologies Institute, Centre for Research and Technology Hellas, Thessaloniki, Greece
∗
Multimedia Understanding Group, Information Processing Lab, Department of Electrical and Computer Engineering,
Aristotle University of Thessaloniki, Thessaloniki, Greece
Keywords:
Facades, Probabilistic Modeling, Context-free Grammars, Recursion, Learning, Classification, Window
Detection.
Abstract:
This paper presents a framework that exploits the expressive power of probabilistic geometric grammars to
cope with the task of facade classification. In particular, we work on a dataset of rectified facades and we
attempt to discover the origin of a number of query facade segments, contaminated with noise. The building
block of our description are the windows of the facade. To this direction we develop an algorithm that achieves
to accurately detect them. Our core contribution though, lies on the probabilistic manipulation of the geometry
of the detected windows. In particular, we propose a simple probabilistic grammar to model this geometry and
we propose a methodology for learning the parameters of the grammar from a single instance of each facade
through a MAP estimation procedure. The produced generative model is essentially a detector of the particular
facade. After producing one model per facade in our dataset, we proceed with the classification of the query
segments. Promising results indicate that the simultaneous use of an appearance model together with our
geometric formulation always achieved superior classification rates than the exclusive use of the appearance
model itself, justifying the value of probabilistic geometric grammars for the task of facade classification.
1 INTRODUCTION
Perhaps one of the most challenging problems in ma-
chine vision is the task of matching images of the
same object that have been photographed under dif-
ferent conditions (viewpoint, lighting conditions, oc-
clusions, etc). In this paper we present a methodology
that classifies noisy query facade instances against
an original facade images. To this direction, we
construct a detector for each facade in our dataset,
i.e., a generative model that evaluates a query fa-
cade instance and we proceed to the classification
task by evaluating all instances against all the de-
tectors. Since facades exhibit repetitive structures
and symmetries, it is not possible to directly apply
traditional matching techniques, like SIFT matching
(Lowe, 2004).
In this paper, we assume that a facade is gener-
ated from a context-free grammar with built-in ge-
ometric information, which uses elementary entities
(windows) as an alphabet. Such a grammar is called a
Probabilistic Geometric Grammar (PGG). In our set-
∗
This work was partially supported by the EU-funded
VITALAS project (FP6-045389)
ting, each grammar defines a generative facade model,
whose parameters are learned by a supervised, MAP
classifier.
The idea of using grammars for object modeling
and recognition/detection is not new. In the litera-
ture, the study of syntactic pattern recognition was
pioneered by Fu et al (Fu, 1981; You and Fu, 1979).
In the mid 90’s, L-systems exploited the recursive na-
ture of grammars to model fractal structures, such as
plants and leaves (Holliday and Samal, 1995; Holli-
day and Samal, 1994). In particular, stochastic gram-
matical models were used in order to express the po-
tential uncertainty of the observed tree structures. Un-
like our approach however, L-systems did not model
the uncertainty of the produced geometry itself, as
each rule produced a particular geometry in a de-
terministic way. In recent years, more sophisticated
grammars, such as attribute graph grammars (Bau-
mann, 1995; Feng and Zhu, 2005; Zhu et al., 2010b;
Zhu et al., 2010a) and context sensitive graph gram-
mars (Rekers and Schurr, 1997) have been developed
to enable more powerful expressiveness and visual
inference mechanisms. Additionally, in the relevant
context of iterative and/or recursive patterns, there are
several approaches that examine the use of Frieze and
641
Panagiotopoulos P. and Delopoulos A..
Detection and Classification of Facades.
DOI: 10.5220/0004283506410650
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 641-650
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Wallpaper groups for image modeling, matching or
Geo-tagging (Liu et al., 2004; Schindler et al., 2008).
However, they are not interested in the use of gram-
matical models. Finally, there is a number of recent
studies on the application of parsing facade images.
These studies use grammatical models for the proce-
dural modeling of buildings and facade reconstruction
(Muller et al., 2006; Wu et al., 2010; Wonka et al.,
2003; Ripperda and Brenner, 2009), or for scene in-
terpretation and segmentation (Teboul et al., 2011;
Teboul et al., 2010).
Intuitively, the use of grammars in facade classi-
fication is an attractive choice due to their ability to
describe compactly both the hierarchical and the re-
cursive structure of the particular objects. Although
there are several recent approaches that cope with the
task of image parsing of facades, we are not aware
of any approaches that proceed (after parsing) to their
classification. To that direction, we propose a novel
approach that is capable of modeling both the struc-
tural and the geometric uncertainty of such structures
and evaluating images against these models.
Throughout this paper, we will use the grammar
of Table 1 to describe facades. The proposed gram-
mar describes facades as strings of entities that cor-
respond to specific parse trees. The leaf nodes of the
parse tree forming the string, i.e., the so called termi-
nal symbols, correspond to the visible substructures
of the facade, which in our case are the windows of
the building (symbol “w”). These structures are rep-
resented only by their 2D position in our analysis. On
the other hand, symbols “B” and “F” are the internal
nodes of the parse tree. These non-terminal symbols
correspond to the floors and the building itself. Their
position is not measured from the examined image.
In that sense we use the term invisible parts for non-
terminal symbols.
Perhaps the most important aspect in the defini-
tion of our PGG is the inclusion of probability distri-
butions determining the relative position of the right
symbols of each replacement rule (children) with re-
spect to the left symbol (parent).
Our framework is essentially a part based model
(Felzenszwalb and Huttenlocher, 2005; Felzenszwalb
and Schwartz, 2007; Fergus et al., 2006). However,
the incorporation of grammars allows us to model fa-
cades whose size and structure may vary significantly
among the various instantiations, due to the existence
of replacement rules that produce repetitions. More
importantly though and unlike traditional part-based
models, the use of grammars allows us to adopt a uni-
fied description that models the original facade itself
and any other partial instance of the particular facade.
Which means that if we only see a part of a building,
the rest of it does not have to be considered occluded,
since it can be described by the adopted model. As
an additional note, although we do propose an ap-
pearance model in our experiments (Section 5), we
mainly focus on the ability of the grammatical model
to improve the classification results when it is used to-
gether with this appearance model compared to the ef-
ficiency of the exclusive use of the appearance model
itself.
In Section 2, we present a formal representation
of PGGs and propose a modeling scheme that cap-
tures the statistical variance of positions. In Section 3
we formulate the bottom-up and top-down equations
that indicate how children nodes define the positions
of their parents and vice-versa. Based on these equa-
tions, we end up with closed-form expressions for es-
timating the parameters of our geometric distributions
and we propose a method for learning these param-
eters from a single image. In Section 4 we present
our window detection framework. Note that the over-
all methodology is not dependent on it since any al-
gorithm that accurately detects the positions of the
windows could be used instead. Section 5 presents
the classification performance of the proposed frame-
work. Finally, conclusions are discussed in Section
6.
2 PROBABILISTIC MODELING
2.1 Probabilistic Geometric Grammars
A PGG is a 5-tuple (V,Σ,R,S, F ), where V is a set
of symbols, Σ ⊂ V is the set of terminal symbols,
R ⊂ (V − Σ) ×V
∗
is a finite set of rules, S ∈ (V − Σ)
is the starting symbol and F is a set with f
k, j
∈ F
denoting the parameters of the generative geometric
model that produces the j-th child of the k-th rule.
It can be seen that PGGs are in essence context free
grammars (pages 113-120 in (Lewis and Papadim-
itriou, 1998)), including F .
According to the aforementioned definition, Table
1 shows the PGG that is used in this paper to describe
facades and Figure 1 displays a modeling example.
In this grammar, terminal symbols “w” express the
windows of the building and one can think of “F” as
representing the floors and “B” the building itself.
On the other hand, f
k, j
= {
¯
x
k, j
,Σ
k, j
} are defined
in Section 2.2 as the mean and covariance of a normal
distribution on the relative positions between a parent
node i and its j-th child in the parse tree, when pro-
duction rule r
k
is used.
Since PGGs are context free, the choice of a rule
does not affect the choice of other rules. Additionally,
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
642
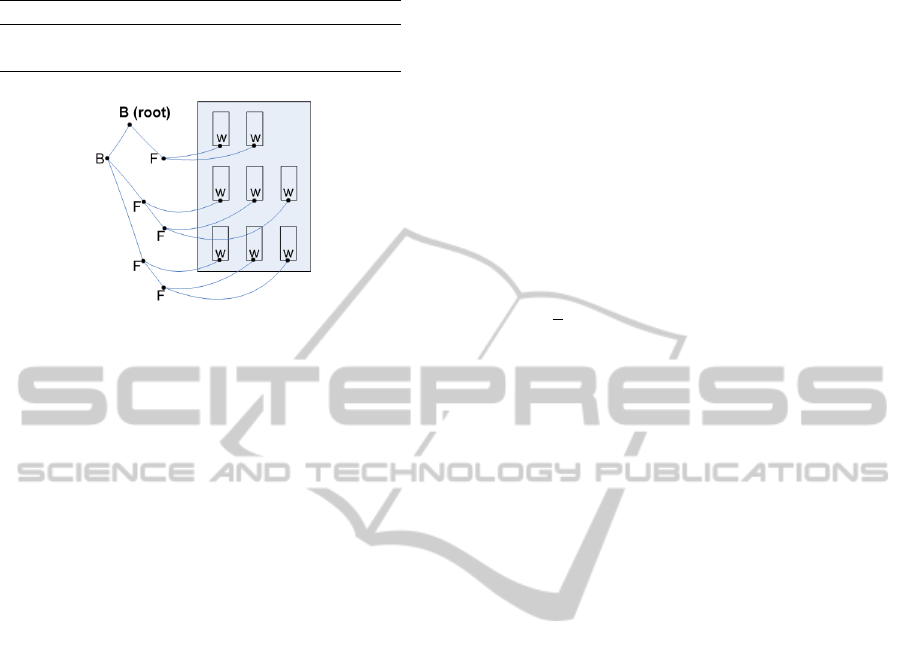
Table 1: A PGG for facades
V = {B, F,w}, Σ = {w}, S ≡ B, R = {r
1
,...,r
4
}
r
1
: B → BF r
2
: B → FF
r
3
: F → Fw r
4
: F → ww
Figure 1: A facade produced by the proposed grammar.
we assume that geometric relations among the chil-
dren of the same rule are independent to each other.
Geometric dependencies exist only among each child
and its parent. Since the employed grammar G in Ta-
ble 1 is in Chomsky Normal Form, let i index a non-
terminal node in a parse tree and ch
1
(i) and ch
2
(i) the
indices of the left and right child of i, respectively.
Moreover, let T be the set of all the parse trees of
this grammar and t ∈ T one of these parse trees. We
denote the probability of observing t, given that the
examined facade is some outcome of the grammar as
P(t|G). It can be interpreted as the probability of the
union of all the geometric relations in t. If we let
the relative position x
(i, j)
, j = 1,2 of node i with re-
spect to its j-th child represent the geometric relation
of these nodes, taking advantage of our independence
assumptions we can write:
P(t|G) =
∏
x
(i, j)
∈t
P(x
(i, j)
)
(1)
2.2 Probabilistic Modeling of Geometric
Relations x
(i, j)
Consider a rule r
k
from Table 1 and an instance of
this rule, consisting of a parent indexed as i and its
two children. We denote by y
i
the position of the par-
ent with respect to some global coordinate system and
y
ch
1
(i)
and y
ch
2
(i)
the corresponding absolute positions
of the two children. Then we consider:
x
(i, j)
= y
ch
j
(i)
− y
i
(2)
as a random variable depending on y
i
.
Assume that we can measure the absolute posi-
tions of the two children of parent i, i.e., y
ch
j
(i)
for
j = 1, 2. In order to estimate the position of the par-
ent, we would have to find the MAP estimate of y
i
:
(y
i
)
MAP
= argmax
y
i
n
Pr
y
i
|{y
ch
j
(i)
}
j=1,2
o
= argmax
y
i
n
Pr
x
(i, j)
|{y
ch
j
(i)
}
j=1,2
o
(3)
It is natural to let the probability on the right
hand side of Equation (3) follow a normal distribu-
tion. Since our grammar is context-free and we have
assumed statistical independence among the geomet-
ric relations of the children of the same rule (Equation
(1)), we can write:
P(x
(i, j)
|y
ch
j
(i)
) =
2
∏
j=1
P(x
(i, j)
|y
ch
j
(i)
)
∝ exp
(
−
1
2
2
∑
j=1
h
(x
(i, j)
−
¯
x
k, j
)
T
Σ
−1
k, j
(x
(i, j)
−
¯
x
k, j
)
i
)
(4)
where
¯
x
k, j
and Σ
k, j
are the mean and the covariance
matrix of x
(i, j)
respectively, for all the instances i of
the rule k and for j = 1, 2.
3 GEOMETRIC DISTRIBUTION
PARAMETER ESTIMATION
Let us initially examine how to determine the posi-
tions of all the nodes in a parse tree, when the pa-
rameters of the normal distribution (means
¯
x
k, j
and
covariances Σ
k, j
) are known. We identify two scenar-
ios. In the first one, we are aware of the positions of
the children and we want to estimate recursively the
positions of the parent nodes (bottom-up). In the sec-
ond one, we know the position of a parent node and
we want to predict the positions of its children (top-
down).
Bottom-up Estimation. Consider two sibling
nodes produced by rule r
k
. If we knew the positions
of these two nodes and the values for
¯
x
k, j
and Σ
k, j
where would their invisible parent be? In order to
find the MAP estimate of the parent, we set the first
derivative of Equation (4) with respect to y
i
equal to
zero, resulting to:
ˆ
y
i
=
2
∑
j=1
Σ
−1
k, j
!
−1
2
∑
m=1
Σ
−1
k,m
ˆ
y
ch
m
(i)
−
¯
x
k,m
, (5)
where
ˆ
y
ch
m
(i)
, for m = 1,2 denotes the previously es-
timated positions for the children.
Since we assumed that the statistical parameters
are known,
ˆ
y
i
can be easily estimated. Moreover,
we can estimate all the non-terminal nodes by ap-
plying Equation 5 recursively from the leaves to the
DetectionandClassificationofFacades
643

root of the parse tree. In the special case that ch
m
(i)
for m = 1, 2 corresponds to leaf nodes, we make the
reasonable assumption that
ˆ
y
ch
m
(i)
≡ y
ch
m
(i)
, so that
Equation 5 holds for all the nodes of the parse tree.
Equation (5) estimates a parent from its children and
thus, we call it bottom-up (BU) equation.
Top-down Prediction. Consider now the reverse
scenario where given the position of a parent node we
want to predict the positions of its children resulting
from replacement rule k. The predicted children po-
sitions are given by
˜
y
ch
j
(i)
=
˜
y
i
+
¯
x
k, j
, (6)
for j = 1, 2, where
˜
y
i
is the measured or estimated
position of parent node i and
¯
x
k, j
are the mean relative
positions of rule r
k
.
If we denote the position of the root node es-
timated by the BU equations as
ˆ
y
0
, we can define
˜
y
0
≡
ˆ
y
0
, so that Equation 6 holds for the whole parse
tree. Applying Equation 6 recursively from the root to
the leaves, we can predict all the positions of the parse
tree. We shall refer to Equation (6) as the top-down
(TD) equation.
Throughout the rest of this paper, positions
marked with hats will be associated with BU esti-
mates, while positions marked with tildes will refer
to TD predictions. Moreover, we will employ the
two aforementioned notation assumptions that will be
used in order to proceed with the parameter estima-
tion, throughout Section 3.
3.1 Optimization Criteria
Consider a training set that consists of several parse
trees. Although we are aware of the structure of these
trees, we have no information regarding the position
of the non-terminal nodes. On the other hand we are
only able to measure the positions of the windows.
Our goal is to estimate the distribution parameters
(means
¯
x
k, j
and covariances Σ
k, j
) of the generative
model.
Let us now examine Equation (5). We can see that
the position of the parent depends on the relation be-
tween the covariances of the children positions. Co-
variances on the other hand do not participate in TD
equations. Indeed, TD equations construct ideal trees,
based only on the mean values of the Gaussian dis-
tributions. Although we could try to discover a set
of parameters that would bring the TD and BU trees
as close as possible, this seems to be too demanding,
since the visible (and measurable) information is cap-
tured only on the leaves of the parse tree. Our genera-
tive model is in fact interested in producing accurately
only what is visible. Therefore, any set of parameters
that sufficiently explains the observed leaves of the
dataset can be accepted to be valid. We seek these
parameters that bring the estimated leaves as close as
possible to the observed ones. In order to achieve this,
we adopt the following optimality criterion:
Definition 1. The optimal means and covariances es-
timated are those that, if used in the BU procedure,
yield a parse tree root node that subsequently and via
the TD procedure generates leaf estimates that are as
close to the observed ones as possible.
In more detail, let our dataset consist of M fa-
cades or, equivalently, M parse trees. Each parse tree
t, t = 1,...,M has a number of m
t
leaf nodes, and
let P =
∑
M
t=1
m
t
be the total number of leaves. As-
sume an indexed collection I of all the nodes in the
dataset. Further assume that the indices of the leaf
nodes within I are i
p
, p = 1...P, so that all the leaf
nodes have absolute positions y
i
p
. If
Ψ = [(
¯
x
1,1
,Σ
1,1
),(
¯
x
1,2
,Σ
1,2
),
...,(
¯
x
4,1
,Σ
4,1
),(
¯
x
4,2
,Σ
4,2
)],
(7)
we seek:
ˆ
Ψ = argmin
Ψ
P
∑
p=1
|y
i
p
−
˜
y
i
p
|
2
(8)
For the sake of clarity, Table 2 introduces some
useful operators that will be used in the next sections.
3.2 Estimating Position Means
Consider a rule r
k
that produces one pair of terminal
nodes and let their parent be indexed with p. Since the
parent node is invisible, the only information we can
extract is the statistical behavior of one terminal node,
as observed from the other one, i.e, the quantity:
δY (p) = y
ch
1
(p)
− y
ch
2
(p)
(9)
We now seek these statistical parameters (
¯
x
k,1
, Σ
k,1
,
¯
x
k,2
,Σ
k,2
) that can reproduce the statistical behavior
of δY (p). Let’s focus on the covariance matrices; the
covariance of the positional difference of the children
will be:
C
0
= cov(y
ch
1
(p)
− y
ch
2
(p)
)
= cov(x
(p,1)
− x
(p,2)
) = C
1
+C
2
,
(10)
where cov denotes the covariance and x
(p, j)
=
(y
ch
j
(p)
− y
p
) corresponds to the position of the par-
ent with respect to its j-th child. The last equation
holds because x
(p,1)
and x
(p,2)
are assumed indepen-
dent. Any pair of C
1
and C
2
that satisfies Equation
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
644

Table 2: Operators.
par(i
n
): index of the parent of node i
n
.
ind(i
n
): rule index and subindex of the rule that produced i
n
. If for example i
n
is the right child of
rule k, ind(i
n
) = [k, 2].
path(i
n
): all the indices of the nodes in the path from i
n
to the root (including i
n
and excluding the root).
term(d): indices of all the terminal nodes at depth d.
node(d): indices of all the nodes at depth d.
(10) is an acceptable choice for Σ
k,1
and Σ
k,2
respec-
tively. Therefore, we are free to choose:
ˆ
C
1
=
ˆ
Σ
k,1
= λC
0
ˆ
C
2
=
ˆ
Σ
k,2
= (1 − λ)C
0
(11)
with 0 < λ < 1.
This observation provides us with two important
benefits:
1. We reduce the parameter space because we do not
have to estimate both covariances.
2. Equation (5) transforms to a covariance free ex-
pression. In the following, we choose λ = 0.5, so
that Equation (5) becomes:
ˆ
y
i
=
1
2
ˆ
y
ch
1
(i)
−
¯
x
k,1
+
ˆ
y
ch
2
(i)
−
¯
x
k,2
(12)
It can be proved that using the same rationale, if
we denote with Σ
k,δy
the statistical covariance of the
positional differences of all the children produced by
rule k, we can generalize so that we can find covari-
ances, such that:
ˆ
Σ
k,1
=
ˆ
Σ
k,2
= Σ
k,δy
/2 (13)
for all rules k = 1, ..., 4 that can produce the statistical
behavior of the observed leaves of a parse tree. We
adopt this choice and thus, in the sequel we shall use
Equation (12) instead of Equation (5).
In accordance to Definition 1, we will use the BU
and TD equations to find an expression of the pre-
dicted leaf positions
˜
y
i
p
, with respect to the measured
window positions y
i
p
and the mean positions of the
model. Consequently, we will estimate the position
means that minimize the distance between
˜
y
i
p
and y
i
p
.
According to Equation (12), the position of the
root can be written as:
ˆ
y
0
= 0.5
ˆ
y
ch
1
(0)
− 0.5
¯
x
ind(ch
1
(0))
+ 0.5
ˆ
y
ch
2
(0)
− 0.5
¯
x
ind(ch
2
(0))
By recursively eliminating the internal node posi-
tions, we come up with:
ˆ
y
0
=
D
∑
d=1
"
1
2
d
∑
i∈term(d)
y
i
−
∑
j∈node(d)
¯
x
ind( j)
!#
,
(14)
where D is the maximum depth of the particular tree.
Equation (14) expresses the position of the root node
with respect to the measured window positions and
the mean positions.
In order to predict the position of the leaf node i
p
with respect to the position of the root node
ˆ
y
0
, we
apply Equation (6) recursively, resulting to:
˜
y
i
p
=
˜
y
par(i
p
)
+
¯
x
ind(i
p
)
=
=
˜
y
par(par(i
p
))
+
¯
x
ind(par(i
p
))
+
¯
x
ind(i
p
)
= ···
=
ˆ
y
0
+
∑
j∈path(i
p
)
¯
x
ind( j)
(15)
The last equality in Equation (15) holds because, as
explained previously, the roots of the BU and the TD
trees are common so that
ˆ
y
0
≡
˜
y
0
.
Combining Equations (15) and (14) we can write:
˜
y
i
p
− y
i
p
= M
i
p
X + c
i
p
(16)
so that
c
i
p
=
D
∑
d=1
"
1
2
d
∑
i∈term(d)
y
i
!#
− y
i
p
, (17)
X = [
¯
x
T
1,1
,
¯
x
T
1,2
,··· ,
¯
x
T
4,2
]
T
(18)
and
M
i
p
=
G
i
p
([1,1]),G
i
p
([1,2]),G
i
p
([2,1]),·· ·
··· , G
i
p
([4,2])
(19)
where
G
i
p
([a,b]) =
∑
j∈path(i
p
)
δ(ind( j) − [a,b])I
2
−
D
∑
d=1
1
2
d
∑
p∈node(d)
δ(ind(p) − [a,b])I
2
!
(20)
where I
2
is the 2 × 2 identity matrix and δ(A,B) = 1
iff A = B and 0 otherwise. Minimizing the L
2
norm of
Equation (16) for all the leaf nodes, we get:
P
∑
p=1
M
T
i
p
M
i
p
X +
P
∑
k=1
M
T
i
k
c
i
k
= 0 (21)
Equation (21) has a unique solution, so that:
X = −
"
P
∑
p=1
M
T
i
p
M
i
p
#
−1
P
∑
k=1
M
T
i
k
c
i
k
(22)
DetectionandClassificationofFacades
645
Matrix
∑
P
p=1
M
T
i
p
M
i
p
encodes the structure of
the parse trees and does not depend on the measured
positions of the leaf nodes. It is in general rank de-
ficient. Regarding the employed grammar of Table
1, it is sufficient to define one of the mean values on
each non-recursive rule (for example
¯
x
2,1
and
¯
x
4,1
).
Thus, we set arbitrary values the particular X entries
and solve for the remaining ones. The obtained solu-
tion, X
est
, is certainly a minimizer of Equation (8) and
hence, it describes the observations in the LSE sense.
3.3 Covariance Estimation
Since we have estimated the mean positions, we can
use the BU equations to estimate the positions of all
the internal nodes of the parse tree.
As explained before (Equation (13)), we assumed
that
ˆ
Σ
k,1
=
ˆ
Σ
k,2
= Σ
k,δy
/2, for all k = 1, ...,4 and all we
need is a way to estimate Σ
k,δy
. We proceed with the
estimation using the following procedure, for all the
rules in the grammar:
1. Pick a rule r
k
.
2. Identify all the instances of the particular rule in
the dataset, and let the corresponding parents be
indexed as k
1
...k
N
.
3. Estimate the sample mean of δY (k
j
), j = 1,...N
(Equation (9)), over the N instances of rule r
k
.
4. Estimate the sample covariance Σ
k,δy
of
δY (k
j
), j = 1,...N, over the N instances of
rule r
k
.
5. Choose:
ˆ
Σ
k,1
=
ˆ
Σ
k,2
= Σ
k,δy
/2.
3.4 Learning from a Single Image
Assume for a moment that we have achieved to detect
the windows of a facade and we have constructed its
parse tree (see Section 4). Since our ultimate goal is
to construct a detector for this facade, we are limited
to use a single image to produce the desired geometric
model. However, due to the employed grammar, the
second rule will appear only once in each facade. Ad-
ditionally, windows are not spread on a regular grid in
general, since the distance among windows may vary
across a building and we would like to capture this
behavior in the covariance matrices.
In order to to create a sufficient dataset per facade,
we define a n × m segment as a part of the parse tree
that contains n floors and m windows per floor. We
construct a dataset that includes the original parsetree
and all the possible 3 × 3 parsetrees. If this is not
possible, in the case for example that n (or m) in the
original parse tree is 2, we set n (and/or m) equal to 2,
accordingly.
Conclusively, we learn one geometrical model per
facade, using the original parse tree and the selected
n × m segments, using the techniques described in
Section 3.
4 WINDOW DETECTION
The proposed window detection framework produces
the positions of the windows along with the horizontal
and vertical period and a set of characteristic windows
of each facade. Since we expect the detected windows
to lie on a grid, it is straightforward to define their or-
dering on the plane and therefore, the corresponding
parse tree (see also Figure 1). On the other hand, the
produced periods and characteristic windows of each
facade will be used for the detection of windows on
our test images, in Section 5.
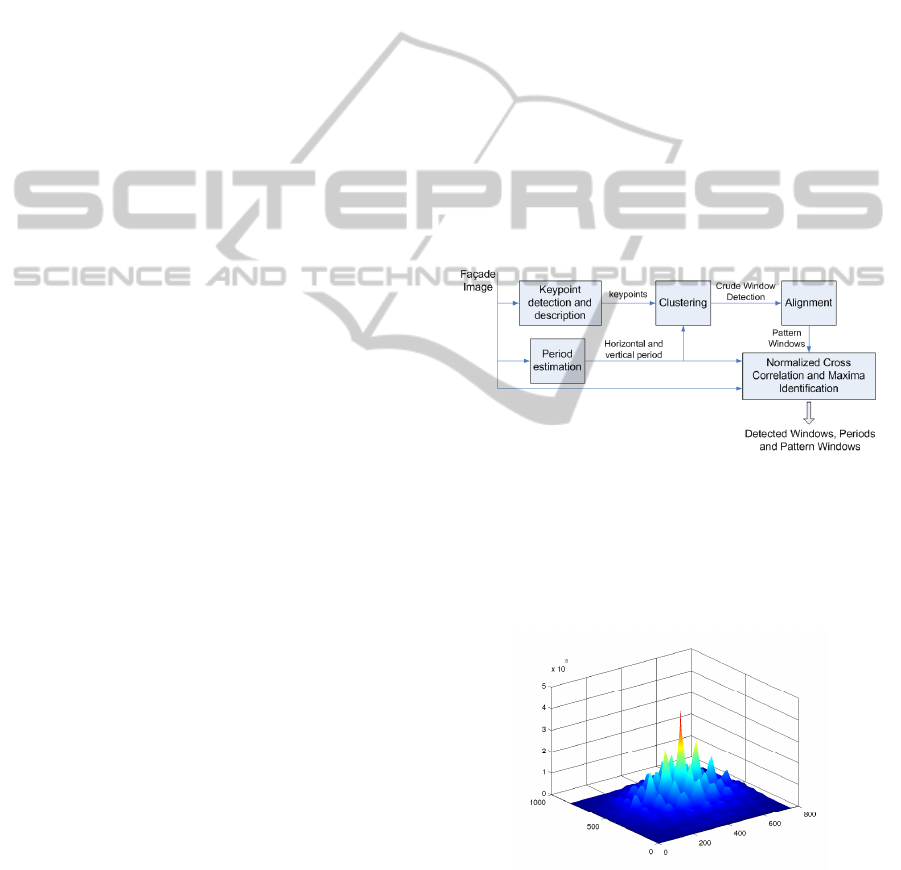
Figure 2: The window detection diagram.
We initially approximate the horizontal and the
vertical period of each facade, namely T
x
and T
y
. This
is achieved by cross-correlating the image with itself
and calculating the distance between the two highest
consecutive peaks along each dimension (Figure 3).
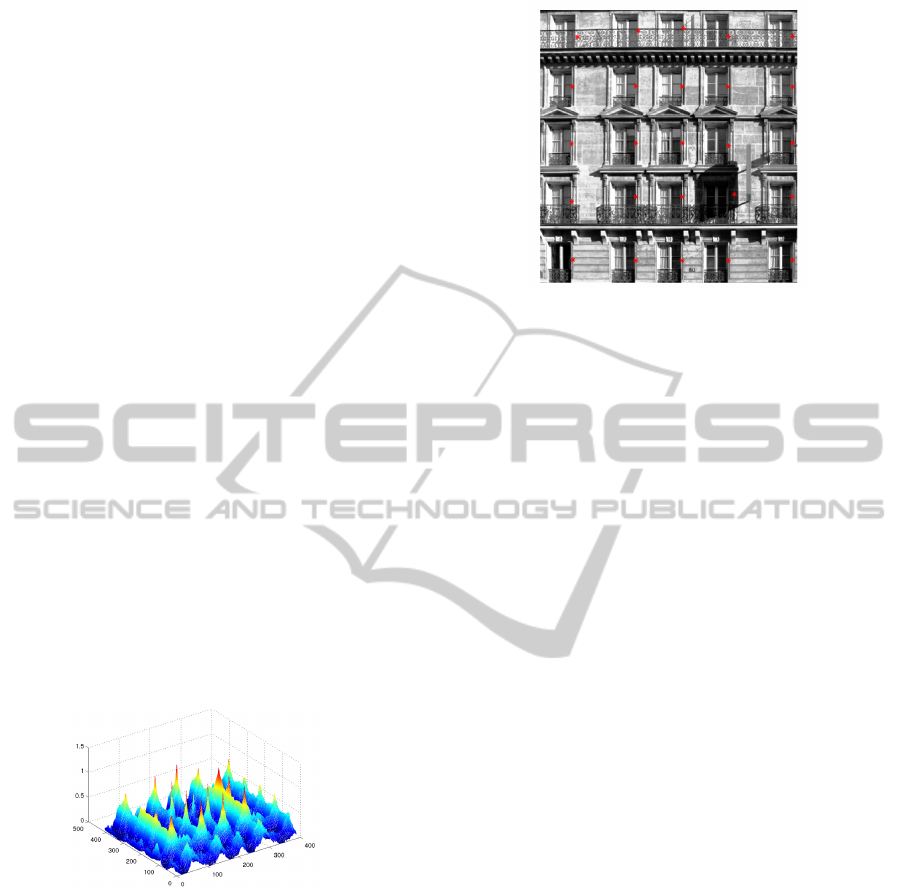
Figure 3: Cross correlation of an image with itself. The dis-
tance between two consecutive peaks along each dimension
approximate the horizontal and vertical period.
In order to detect the windows we modify the
bottom-up approach described in the PhD thesis of
Olivier Teboul (Teboul, 2011). In particular we use
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
646

the FAST (Rosten et al., 2009) corner detector to de-
tect our interest points and we use the SIFT descriptor
with the same scale and orientation for all points.
From the large pool of the detected keypoints, we
have to determine which of them refer to windows and
choose one keypoint per window, for as many win-
dows as possible. This keypoint should describe the
same part of the window for every facade (a partic-
ular corner for example). To this direction, we uti-
lize a three step clustering scheme using the algorithm
proposed in (Komodakis et al., 2008). We justify the
choice of this algorithm for two reasons. First of all,
the number of clusters K is an output of the formula-
tion and in our case, K is unknown. Secondly, cluster
centers are necessarily members of the data set. We
use the L
1
norm as our distance function.
Figure 4: The first clustering produces a number of clus-
ters, some of which refer to windows. We can see such a
cluster in the second image. In order to obtain one keypoint
per window, we perform the second clustering and we drop
potential outliers (third figure). We can see that in this case,
the outlier detection disposed several good windows. This
happened because this facade is not strictly periodic. The
windows on the left and right edges are further from their
neighbors, than the ones in the middle and T
x
expresses the
period in the middle windows. Finally in the fourth fig-
ure, the detected windows are aligned. We can see that the
shaded window did not align very well. On the contrary,
the other window of the same floor moved to align with the
rest detected windows. The scope of this procedure is to
choose the patterns for the normalized cross correlation that
follows, in both the training and the testing phase.
First Clustering. In the first clustering phase we
cluster the SIFT descriptors. The output of the first
phase is a number of clusters, some of which do not
refer to windows. On the other hand, since it is natural
for neighboring keypoints that lie on the same edge to
have similar SIFT descriptors, clusters that do refer to
windows will have more than one keypoints per win-
dow, in general (see the second image of Figure 4).
Second Clustering. Our second clustering phase
aims at choosing exactly one keypoint per window.
We cluster the positions of the members of each clus-
ter from the first clustering, so that windows are de-
scribed by the emerged cluster centers. We assume
that cluster centers should satisfy the estimated peri-
ods. Therefore, we examine each center and if there
are no other centers that lie in a horizontal (vertical)
distance close to T
x
(T
y
), we consider the particular
center to be an outlier and we drop it (see the third
image of Figure 4). Although this is too strict and
we might drop points that lie on windows, we are still
interested to make a crude estimation that will be en-
hanced later.
Third Clustering. Our third clustering phase aims
at identifying which of the initial clusters refer to win-
dows. We separately cluster the horizontal and verti-
cal distance between all the pairs of cluster centers of
the second phase. For each dimension, if we discover
a cluster with respectable cardinality whose distance
is close to the corresponding period (T
x
and T
y
), we
consider that the cluster from the first phase is refer-
ring to windows. For all the potential clusters that
refer to windows, we choose the one with the largest
cardinality.
Once we have chosen which of the initial clus-
ters we will use, we consider the corresponding clus-
ter centers from the second phase as an initial crude
estimation of some window positions. If we have
detected N windows, we choose N image segments
of T
x
× T
y
area, centered at the detected positions
y
1
,...,y
N
.
Alignment and Choise of Pattern Windows.
Since we want the window centers to represent the
same part of the window, we perform an iterative
alignment of the image segments. For each segment i,
we compute the normalized cross-correlation of i with
the rest j = 1,2, ..., i − 1, i + 1, ...,N segments. For
each one of the j segments, we locate the maximum
y
0
j
and we deviate y
j
towards y
0
j
, i.e.,y
0
j
= x
j
+ d(y
0
j
−
y
j
), where 0 < d < 1. We perform the same procedure
for 60 epochs until convergence. If some of the win-
dow centers fail to converge or fall out of the image
boundaries, we drop them. At the end of the align-
DetectionandClassificationofFacades
647
ment we have M windows of size T
x
× T
y
centered at
y
a
1
,...,y
a
M
. Let’s call them patterns.
Final Detection and Ordering of the Windows on
the plane. So far we have managed to detect some
windows in various locations of the facade and we
want to detect as many as possible. To this direc-
tion, we compute the normalized cross-correlation of
the original image with each one of the M patterns.
We aggregate the results using the max operator (Fig-
ure 5) and we search for the maxima that correspond
to windows. In particular, we assume that one of
the highest peaks is a window. If the coordinates
of this peak are [p
w
x
p
w
y
]
T
, we search for new win-
dows in an area of T
x
× T
y
, around [p
w
x
± T
x
p
w
y
]
T
and
[p
w
x
p
w
y
± T
y
]
T
. The maxima within each one of these
four areas are our new windows. We continue the
same procedure recursively, making sure that we do
not search twice within the same area. The output of
this procedure is our final choice of windows (Figure
6), along with their ordering. The order of windows is
defined by the progress of window searching. If, for
example, we detect the i-th window of the j-th floor
at position [p
w
x
p
w
y
]
T
and then we manage to detect
another window in the area around [p
w
x
+T
x
p
w
y
]
T
, the
new window will be the i+1 window of the j-th floor.
If on the other hand the new window is detected in the
area around [p
w
x
p
w
y
− T
y
]
T
, the new window will be
the i-th window of the j − 1 floor.
Figure 5: Cross Correlation of the original image with the
patterns. The peaks indicate the positions of the windows.
By examining the ordering, we can argue if this
procedure has missed any windows. There are two
cases of occlusion. In the first case we identify gaps
in the ordering. For example if the ordering for one
floor is [1 2 4 5], we assume that the third window is
missing. In the second case, there are floors that have
less windows than the maximum number of windows
per floor, or the first window of a floor is missing.
In the first case we interpolate the missing windows
between the previous and the next detected ones. In
the second case, we extrapolate the missing windows
from the last or the first detected window of the floor
that exhibits the occlusion, according to T
x
.
Figure 6: The final detected windows.
5 RESULTS
We apply our approach on the Ecole Centrale Paris
Facades Database (Teboul, 2012) produced and
maintained by Olivier Teboul. In particular we focus
on the Paris, France collection of 215 rectified im-
ages. From each one of these images we crop a small
segment and our main goal is to discover the origin
of a distorted version of each segment wrt the original
215 images. Therefore, we want to compute 215 geo-
metric models and evaluate each test segment against
all models.
In order to compute these models, for each facade
we apply the window detection techniques described
in Section 4, we produce the parse trees (along with
the horizontal and vertical periods and the pattern
windows) and we learn the parameters, as described
in Section 3.
Then for each one of the cropped test segments
we follow similar steps as in the window detection
phase; we evaluate the normalized cross correlation
of the segment with each of the M patterns of the par-
ticular model, we aggregate using the max operator
and we search for windows using the periods T
x
and
T
y
that were estimated for the production of the partic-
ular model. Therefore we detect some windows and
their ordering and we produce the parse tree.
We proceed by utilizing an appearance model. In
particular, when our searching algorithm detects a
window, we crop a T
x
× T
y
area centered at the detec-
tion point and we compare it with the pattern window
that gave the maximum cross-correlation value at the
particular position. Let M
0
be the number of the de-
tected windows in the segment. We compute the mean
squared error S
j
between all the pixels of the j-th de-
tected window and the corresponding pattern and we
define the appearance likelihood of the image to be:
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
648
P
a
=
∑
M
0
i=1
S
i
M
0
. (23)
In order to estimate the geometric likelihood, we
estimate the frames of the non-terminal nodes using
the BU equations and we would normally use Equa-
tion (1). However, geometric likelihood is a decreas-
ing function of the size of the parse tree. In order to
compensate the fact that different models detect dif-
ferent number of windows, we evaluate the geometric
likelihood as:
P
g
=
logP(t|G)
M
0
, (24)
where P(t|G) is evaluated from Equation (1).
The overall expression of the likelihood is
P = P
g
− kP
a
, (25)
where k is a normalizing factor.
We perform the evaluation 25 times by grad-
ually blurring and adding noise to the segments.
In particular we use a Gaussian kernel with σ
k
=
0.8,1.3,1.8,2.3, 2.8 to blur the images and we add
random noise from a uniform distribution in [0,N],
where N = 90,130,170,210,250. With reference to
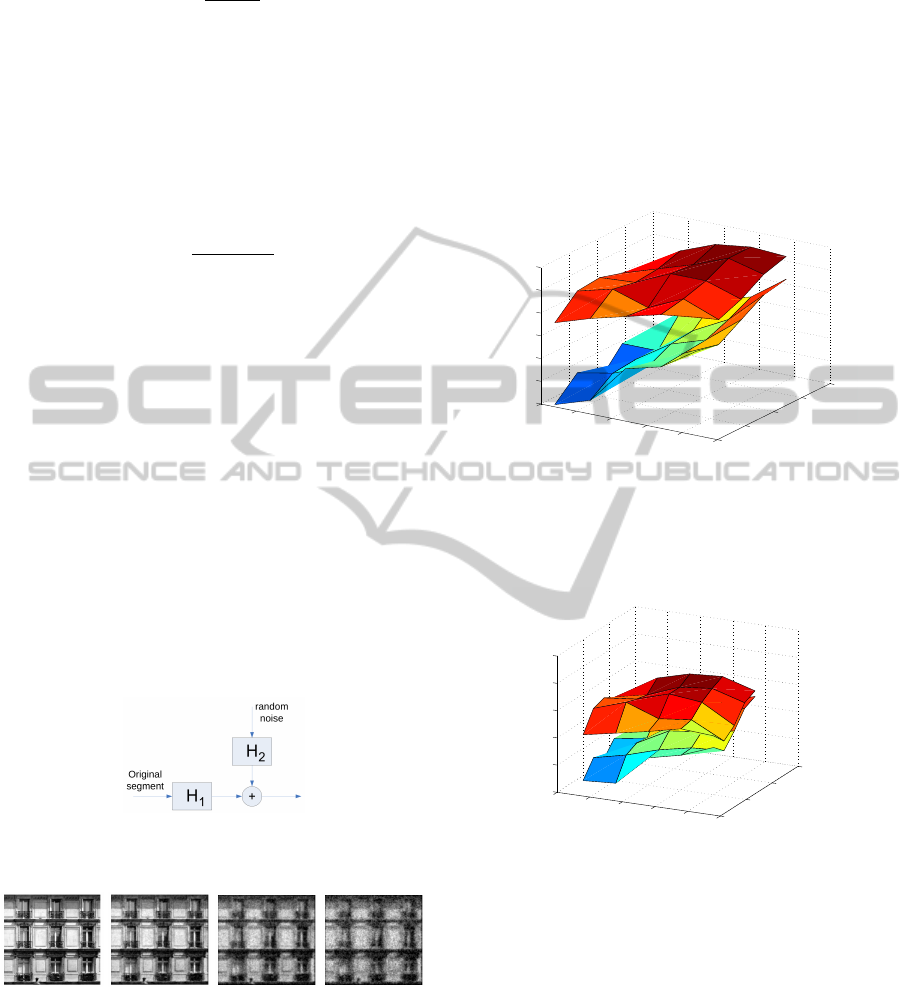
Figure 7, the original segment is blurred with the
Gaussian filter H
1
whose variance is σ
k
. The ran-
dom noise is initially filtered with a Gaussian filter
H
2
whose variance is 1. We normalize the filtered
noise by subtracting its mean value and we add it to
the blurred segment.
Figure 7: Blurring and adding noise to the original image
segments
Figure 8: The original test image and three noisy instances.
For each one of the 25 noise scenarios, we com-
pute the number of correct classifications and the
mean reciprocal rank (MRR) (Voorhees, 1999) for
two cases. In the first one, we use only the appear-
ance model and in the second one we use both the
appearance and the geometric model. If there is no
noise present, our appearance model manages to clas-
sify all the samples correctly, making the use of our
geometric model unnecessary. However, we can see
in figures 9 and 10 that the contribution of the geomet-
ric model becomes significant, as the noise increases.
The less our appearance model achieves to discover
the correct classification, the more our geometrical
model contributes to the overall performance. As a
final remark, we can see that the surfaces that repre-
sent the combined use of both models are constantly
above the surfaces that represent the explicit use of
the appearance model.
0.5
1
1.5
2
2.5
3
50
100
150
200
250
110
120
130
140
150
160
170
Random Noise Magnitude
Gaussian blur (σ)
Number of Correct Classifications
Figure 9: Number of correct classifications against noise.
The upper surface corresponds to the combined use of ap-
pearance and geometry. We see that under the presence of
noise, the contribution of the geometric model is significant
in the overall classification rate.
0.5
1
1.5
2
2.5
3
0
100
200
300
0.65
0.7
0.75
0.8
0.85
0.9
Random Noise Magnitude
Gaussian blur (σ)
MRR
Figure 10: MRR against noise. As in Figure 9, the upper
surface corresponds to the combined use of appearance and
geometry. The more the noise, the more necessary it is to
take advantage of the geometric information.
6 CONCLUSIONS
This paper examined the effectiveness of PGG’s in
modeling and classifying facades. We employed a de-
scription where terminal symbols correspond to win-
dows, generated by the geometric grammar. We de-
rived closed-form expressions for estimating the ge-
ometric parameters of our grammar and we managed
to learn the parameters from a single image. We de-
veloped a window detection algorithm and we applied
DetectionandClassificationofFacades
649

our framework on a dataset of 215 rectified facades.
Our geometric model was tested against a proposed
appearance model. The performance of the proposed
methodology was very promising, as the simultane-
ous use of the geometric and the appearance model
constantly achieved better classification performance
than the exclusive use of the appearance model itself,
in all examined cases. Results justify our intuition to
use grammatical models for facade classification.
The proposed method requires the a priori defi-
nition of the producing rules but not their geometric
statistics. Despite the fact that the simplicity of the
adopted grammar proved to be very effective, more
complex grammatical models could be used instead,
in order to capture the different horizontal periodic
patterns that may exist in facades. Moreover, we cur-
rently work on the extension of PGGs to include rota-
tion and scale relations, so that they could be applied
to different object classes, such as plants, aerial urban
images, etc.
ACKNOWLEDGEMENTS
The authors would like to thank Nikos Komodakis for
providing the source code for the clustering algorithm
that was used in Section 4.
REFERENCES
Baumann, S. (1995). A simplified attribute graph grammar
for high level music recognition. In ICDAR, volume 2,
pages 1080–1083. IEEE.
Felzenszwalb, P. and Huttenlocher, D. P. (2005). Pictorial
structures for object recognition. IJCV, 61(1):55–79.
Felzenszwalb, P. and Schwartz, J. (2007). Hierarchical
matching of deformable shapes. In CVPR. IEEE.
Feng, H. and Zhu, S. C. (2005). Bottom-up/top-down im-
age parsing by attribute graph grammar. In ICCV, 10,
pages 1778–1785. IEEE.
Fergus, R., Perona, P., and Zisserman, A. (2006). Weakly
supervised scale-invariant learning of models for vi-
sual recognition. IJCV, 71:273–303.
Fu, K. S. (1981). Syntactic Pattern Recognition and Appli-
cations. Prentice Hall.
Holliday, D. J. and Samal, A. (1994). Recognizing plants
using stochastic l-systems. In ICIP, volume 1, pages
183–187. IEEE.
Holliday, D. J. and Samal, A. (1995). A stochastic grammar
of images. Object recognition using L-system fractals,
16:33–42.
Komodakis, N., Paragios, N., and Tziritas, G. (2008). Clus-
tering via lp-based stabilities. In NIPS.
Lewis, H. R. and Papadimitriou, D. (1998). Elements of the
Theory of Computation. Prentice Hall.
Liu, Y., Collins, R., and Tsin, Y. (2004). A computa-
tional model for periodic pattern perception based on
frieze and wallpaper groups. Transactions on PAMI,
26(3):354–371.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. IJCV, 2(60):91–110.
Muller, P., Wonka, P., Haegler, S., Ulmer, A., and Gool,
L. V. (2006). Procedural modeling of buildings. ACM
Transactions on Graphics, Proceedings of ACM SIG-
GRAPH, 25:614–623.
Rekers, J. and Schurr, A. (1997). Defining and parsing vi-
sual languages with layered graph grammars. Journal
of Visual Language and Computing, 8(1):27–55.
Ripperda, N. and Brenner, C. (2009). Application of a
formal grammar to facade reconstruction in semiau-
tomatic and automatic environments. In 12th AGILE
Conference on GIScience.
Rosten, E., Porter, R., and Drummond, T. (2009). Faster and
better: A machine learning approach to corner detec-
tion. Transactions on PAMI, 32(1):105–119.
Schindler, G., Krishnamurthy, P., Lublinerman, R., Liu, Y.,
and Dellaert, F. (2008). Detecting and matching re-
peated patterns for automatic geo-tagging in urban en-
vironments. In CVPR. IEEE.
Teboul, O. (2011). Shape Grammar Parsing: Application
to Image-based Modeling. PhD thesis, Ecole Centrale
Paris.
Teboul, O. (2012). Ecole Centrale Paris Facades Database.
http://vision.mas.ecp.fr/Personnel/teboul/data.php.
Teboul, O., Kokkinos, I., Simon, L., Koutsourakis, P., and
Paragios, N. (2011). Shape grammar parsing via rein-
forcement learning. In CVPR. IEEE.
Teboul, O., Simon, L., Koutsourakis, P., and Paragios, N.
(2010). Segmentation of building facades using pro-
cedural shape prior. In CVPR. IEEE.
Voorhees, E. M. (1999). Trec-8 question answering track
report. In 8th Text Retrieval Conference.
Wonka, P., Wimmer, M., Sillon, F., and Ribarsky, W.
(2003). Instant architecture. ACM Transactions on
Graphics, 22(3):669–677.
Wu, C., Frahm, J., and Pollefeys, M. (2010). Detecting
large repetitive structures with salient boundaries. In
ECCV. Springer.
You, F. and Fu, K. S. (1979). A syntactic approach to shape
recognition using attributed grammars. Transactions
on SMC, 9:334–345.
Zhu, L., Chen, Y., Freeman, W., and Yuille, A. (2010a).
Latent hierarchical structural learning for object de-
tection. In CVPR. IEEE.
Zhu, L., Chen, Y., Torralba, A., Freeman, W., and Yuille,
A. (2010b). Part and appearance sharing: Recursive
compositional models for multi-view multi-object de-
tection. In CVPR. IEEE.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
650
