
Geo-positional Image Forensics through Scene-terrain Registration
P. Chippendale
1
, M. Zanin
1
and M. Dalla Mura
2
1
Technologies of Vision Research Unit, Fondazione Bruno Kessler, Trento, Italy
2
GIPSA-Lab, Signal and Image Department, Grenoble Institute of Technology, Saint Martin d’Hères, France
Keywords: Media Forensics, Visual Authentication, 3D Terrain-model Registration, Augmented Reality, Machine
Vision, Geo-informatics.
Abstract: In this paper, we explore the topic of geo-tagged photo authentication and introduce a novel forensic tool
created to semi-automate the process. We will demonstrate how a photo’s location and time can be
corroborated through the correlation of geo-modellable features to embedded visual content. Unlike
previous approaches, a machine-vision processing engine iteratively guides users through the photo
registration process, building upon available meta-data evidence. By integrating state-of-the-art visual-
feature to 3D-model correlation algorithms, camera intrinsic and extrinsic calibration parameters can also be
derived in an automatic or semi-supervised interactive manner. Experimental results, considering forensic
scenarios, demonstrate the validity of the system introduced.
1 INTRODUCTION
Digital photographs and videos have proven to be
crucial sources of evidence in forensic science; they
can capture a snapshot of a scene, or its evolution
through time (Casey, 2004); (Boehme et al., 2009).
Geo-tagging (Luo et al., 2011), i.e. the collocation of
geo-spatial information to media objects, is a
relative newcomer to the field of data annotation, but
is growing rapidly. Concurrently, the availability of
easy-to-use image processing tools and meta-data
editors is leading to a diffusion of fake geo-tagged
content throughout the digital world. As geo-tagged
media can be used to corroborate a person’s or an
object’s presence at a given location at a given time,
it can be highly persuasive in nature. Therefore, it is
essential that the content be authenticated and the
associated geo meta-data be proved trustworthy.
The addition of location information has been
fuelled in recent years thanks to the embedding of
geo-deriving hardware, such as Global Positioning
System (GPS), in many consumer-level imaging
devices. Nowadays, the most common way in which
photographs are geo-tagged is through the automatic
insertion of spatial coordinates into the EXIF meta-
data fields of JPEG images; however, a reported
location can easily be tampered with, and varies in
precision according to its means of derivation. For
example, in urban or forested environments, GPS
signals suffer from attenuation and reflection which
leads to inexact, or the lack of, triangulation of
position as was illustrated by (Paek et al., 2010),
commonly referred to as the ‘Urban Canyon’
problem in dense cities (Cui and Ge, 2003).
Standard geo-tagged photos contain three non-
independent pieces of information that provide
valuable location indicative clues:
• Time when the media object was captured;
• Positional information (some devices also
provide orientation data);
• Embedded visual content of the scene.
Although these three indicators are derived from
independent sources and sensors, they are closely
intertwined since they all spatiotemporally describe
a particular scene. These interdependences can be
exploited to derive or validate one piece of
information against the others. (Hays and Efros,
2008) showed that in a natural scene observed from
an arbitrary position, the geometry of solar shadows
cast by objects can provide clues about the time and
orientation of the camera. Analogously,
(Chippendale et al., 2009) illustrated how a captured
location can also be confirmed or hypothesized by
comparing the image content of the real scene with
expected geo-content, through synthetically
generated terrain correlation.
Three elements must be examined in order to
prove, beyond a reasonable doubt, that a geo-tagged
41
Chippendale P., Zanin M. and Dalla Mura M..
Geo-positional Image Forensics through Scene-terrain Registration.
DOI: 10.5220/0004282300410047
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 41-47
ISBN: 978-989-8565-48-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
p
hotogr
a
1) Phot
o
content
o
b
y its
depende
n
consiste
n
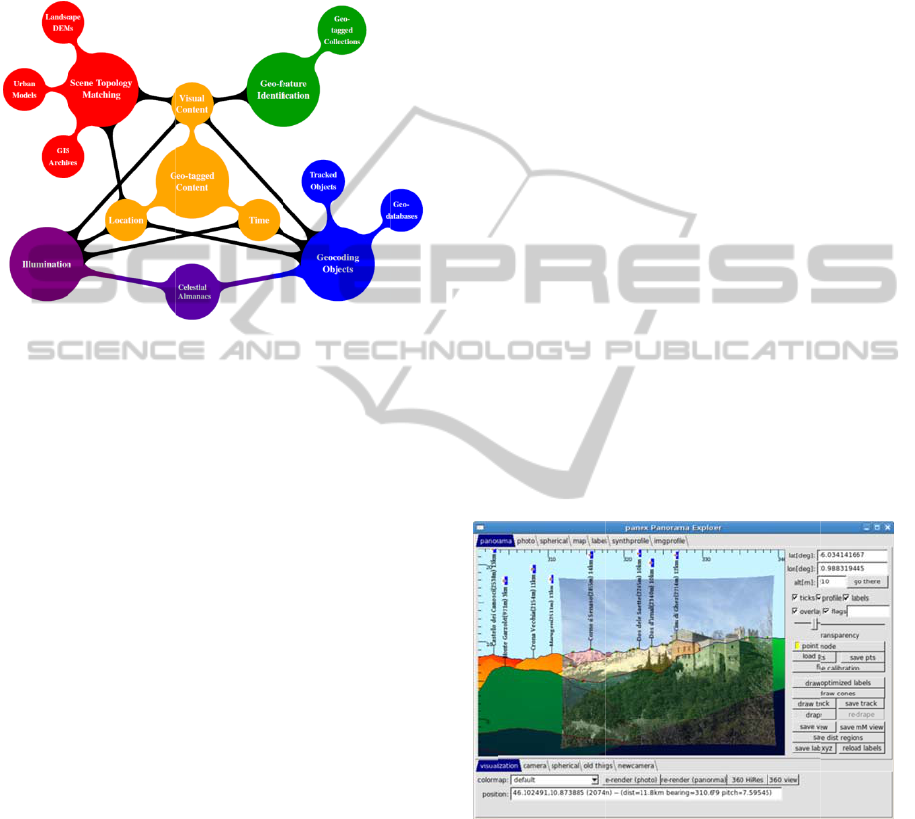
Figure 1
:
intercon
n
The in
t
location
in the
m
of the di
describe
encomp
a
to geo-f
e
p
ortions
images;
p
shadow
s
geocodi
n
identifia
b
or logos
.
In th
of the t
h
of spa
t
p
hotogr
a
checks.
1.1
R
Prior o
p
image f
o
expert-d
e
towards
Constru
c
used t
o
recreati
n
made t
o
massive
a
ph is genuin
e
o
is unmodifie
o
f the photo i
s
location; 3)
n
t events
e
n
t with the lo
c
:
Mind map
o
n
ections.
t
errelationshi
p
and acquisiti
m
ind map see
n
agram highli
g
a geo-tagge
d
a
sses scene-t
o
e
ature identi
fi
of photos
t
purple shows
s
or reflection
s
n
g based o
n
b
le content t
o
.
is paper, we
w
h
ree elements
t
iotemporal
a
ph, through
v
R
elated W
o
p
erational ap
p
o
rensics field
e
pendent, us
a specific
c
tion Se
t
1
or
o
p
rovide
v
n
g a scene,
o
o
nearby ge
o
socially gen
e
e
:
d at a
p
ixel l
e
s
consistent
w
The obse
r
e
mbedded i
n
c
ation and ti
m
o
f geo-
p
ositio
n
p
s between
on time have
n
in Figure 1.
g
hts the three
d
media obje
c
o
pology matc
h
fi
cation tools
t
t
o similar o
n
illumination
s
; and the blu
e
n
the matc
h
o
geo-databas
e
w
ill concentr
a
, relating to
t
meta-data
a
v
isual geo-c
o
o
r
k
p
roaches in t
h
have been v
e
ing a
d
-hoc
case. To
o
Visual Natu
r
v
isual evide
n
o
r, visual co
r
o
-tagged ph
o
e
rated geo-
p
h
o
e
vel; 2) The v
i
w
ith that sugg
e
r
vation of t
i
n
the phot
o
m
e suggested.
n
al image fore
n
visual con
t
been genera
l
The yellow
key elements
c
t. The red re
g
h
ing; green re
l
t
hat aim to
m
n
es in pre-ta
g
relationships,
e
region relat
e
h
ing of mac
e
s, e.g. scene
a
te on the se
c
t
he authentic
a
a
ssociated t
o
o
ntent consist
e
h
e geo-
p
ositi
e
ry laborious
m
ethods tail
o
o
ls like
W
r
e Studio
2
ca
n
n
ce by virt
u
r
relations ca
n
o
tos (taken
f
o
to databases
i
sual
e
sted
i
me-
o
is
n
sics
n
tent,
l
ized
core
that
gion
l
ates
m
atch
g
ge
d
,
e.g.
e
s to
c
hine
text
c
ond
a
tion
o
a
e
ncy
i
onal
and
ored
W
orld
n
be
u
ally
n
be
f
rom
like
Pa
n
sy
n
in
r
inc
l
20
1
et
a
the
(B
a
ha
v
to
fea
t
ma
c
fea
t
2D
sy
n
of
M
o
sh
o
p
h
o
1.
2
In
t
sta
t
cor
r
to-
w
b
e
evi
d
2
In
f
op
e
an
a
co
n
fea
t
util
n
oramio
3
).
The automat
i
n
thetic model
s
r
ecent years,
l
uding robot
i
1
1), Augment
a
l., 2003), co
m
outdoor e
n
a
boud et al.,
v
e recently e
x
align visua
l
t
ures. This a
p
c
hine-extract
a
t
ures in a sy
n
pixel-regio
n
n
thetic model
s
3D geo-loc
a
o
dels (DEMs
)
o
uld correspo
n
o
to location.
2
Contri
b
t
his paper, w
e
t
e-of-the-art
r
elation algo
r
w
orld mappi
n
used to va
l
d
ent, geo-tag
g
Figure 2: Scre
e
SYSTE
M
f
orensic inve
s
e
rators are
p
a
lysis loop.
O
n
ditions, and
t
t
ure detectio
n
ised to red
u
i
c matching
o
has been we
l
spanning m
a
c navigation
e
d Reality, p
h
m
puter vision
vironment,
(
2
011) and (
H
x
plored terrai
n
terrain pr
o
p
proach inv
o
a
ble features
f
t
hetic 3D-mo
d
n
features t
o
used, render
e
a
ted data (e
)
), yield silh
n
d to the ter
r
b
ution
e
illustrate h
o
visual-feat
u
i
thms to crea
t
g tool (seen
i
l
idate the a
u
g
ed photogra
p
e
nshot of the p
h
M
OVER
V
s
tigations, it i
p
laced insid
e
O
ften, occlus
i
t
ampering im
p
n
, hence ma
n
u
ce detection
o
f photo cont
e
l
l explored in
a
ny fields o
f
(Leotta an
d
hotogrammet
r
and remote s
e
(
Baatz et al
H
ays and Efr
o
n
-feature ide
n
o
files to ge
o
o
lves the ma
t
f
rom a photo
t
del, essential
l
o
3D locati
o
e
d from a wi
d
e
.g. Digital
h
ouette profil
e
r
ain visible a
t
o
w we have
i
u
re to
3
t
e an interact
i
i
n Figure 2)
w
u
thenticity o
f
p
hs.
h
oto registratio
n
V
IEW
i
s essential t
h
e
the visua
l
i
ons, difficul
t
mp
ede automa
t
n
ual guidanc
e
ambiguities
e
nt to 3D
literature
f
research
d
Mundy,
r
y (Guidi
e
nsing. In
., 2012),
o
s, 2008)
n
tification
o
-specific
t
ching of
t
o similar
l
y pairing
o
ns. The
d
e variety
E
levation
e
s which
t
a stated
i
ntegrated
3
D-model
i
ve pixel-
w
hich can
f
terrain-
n
tool.
at human
l
content
t
lighting
t
ic terrain
e
can be
.
Results
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
42

from t
h
p
rocess
form o
together
‘goodne
s
the user
b
y assig
n
click int
e
The
on the a
l
and (Ko
s
to matc
h
corresp
o
When d
e
the mos
t
our ap
p
generate
surface
a
al., 20
0
systema
t
location
their a
n
spherica
l
equiang
u
p
lane c
o
altitude
location
)
To d
of the c
a
image is
reported
data in
absent (
o
through
of the al
i
Phot
o
model i
n
1. extr
a
syntheti
c
2. extr
a
3. a
corresp
o
4. appl
y
b
est al
i
p
rojecti
o
The
p
ro
c
b
elow i
n
We
syntheti
c
b
etween
originati
The
using a
h
e computer
-
are ranked
a
f an Aug
m
with a corre
l
s
s’. In situat
i
can influenc
e
n
ing new cor
r
e
rface.
automatic ge
o
lgorithm
p
ro
p
s
telec and Ro
h
visibly-evi
d
o
nding synthe
t
ealing with
n
t
relevant fea
t
p
roach, the
d from DE
M
a
s a regular
g
0
5). These
r
t
ically proje
c
onto the insi
d
n
gular inters
e
l
image i
s
u
lar planar g
r
o
rresponds t
o
and depth (
i
)
.
d
erive camera
a
mera that to
o
firstly scale
d
(usually deri
v
the EXIF).
I
o
r incorrect),
a use
r
-assiste
i
gnment stag
e
o
graphs are
n
four phases:
a
ction of sal
i
c
image;
a
ction of salie
n
registration
o
ndences bet
w
y
an optimiz
a
i
gnment pa
r
o
n error.
c
essing pipel
i
n
Figure 3.
generate sal
i
c
image
b
y m
adjacent p
o
ng from the
p
p
hoto’s salie
n
variety of
m
-
vision pow
a
nd offered t
o
m
ented Real
i
l
ation metric
i
ons where
a
e
subsequent
r
elation pairs
o
-registration
p
osed
b
y (Ba
b
ckmore, 200
8
d
ent geogra
p
t
ic features i
n
n
atural outdo
o
t
ures is terrai
n
virtual terr
M
s, which rep
r
g
rid of eleva
t
r
enderings a
r
c
ting rays
d
e surface of
a
e
ctions with
s
then
p
ro
j
r
id, in which
o
a certain l
a
i
.e. distance
f
pose, i.e. th
e
o
k the origin
a
d
according t
o
v
ed from the
f
I
f focal-leng
t
then the syst
e
d scaling str
a
e
.
aligned to
i
ent depth
p
n
t profiles fro
m
algorith
m
w
een the two
p
a
tion algorit
h
r
ameters th
a
i
ne of our sy
s
i
ent depth
p
arking abrup
t
o
ints lying
o
p
hoto’s positi
o
n
t depth pro
fi
m
eans: edge
e
red registr
a
o
the user i
n
i
ty visualiza
t
to indicate
m
a
mbiguities
a
refinement st
a
using a point
process is
ba
b
oud et al., 2
0
8
), which atte
m
p
hical feature
n
a virtual m
o
o
r scenes, o
n
n
morpholog
y
a
in models
r
esent the Ea
r
t
ion values (
L
r
e generated
f
rom a ph
o
a
sphere recor
d
the DEM.
T
j
ected onto
each point i
n
a
titude, longi
t
f
rom the ph
o
e
pan, tilt and
a
l photograph
,
o
the field-of-
v
f
ocal length
m
t
h informatio
e
m can estim
a
a
tegy forming
the equian
g
p
rofiles from
m
the photo;
searches
p
rofile sets;
hm
to derive
t minimize
s
tem is visua
l
p
rofiles from
t
distance cha
n
o
n a virtual
o
n.
fi
les are extr
a
detection, c
o
a
tion
n
the
t
ion,
m
atch
a
rise,
ages
t
and
ased
0
11)
m
pts
s to
o
del.
n
e of
y
. In
are
r
th’s
L
i et
by
o
to’s
r
ding
This
an
n
the
t
ude,
o
to’s
d
roll
, the
v
iew
m
eta-
o
n is
a
te it
part
g
ular
the
for
the
re-
l
ized
the
n
ges
ray
a
cted
o
lour
ap
p
fol
l
p
ro
unl
i
inc
o
or
f
co
u
(e.
g
Fig
u
Co
r
the
p
ro
f
tra
n
ca
n
Fig
ext
r
ma
c
cas
e
im
p
ev
a
sca
l
opt
i
p
ar
a
ali
g
ex
h
p
ar
a
ho
w
Co
n
p
earance, blu
e
l
owing on fro
m
files generat
e
i
ke those in
t
o
mplete due t
f
oreground o
b
u
ld lead to s
t
g
. mist or fog)
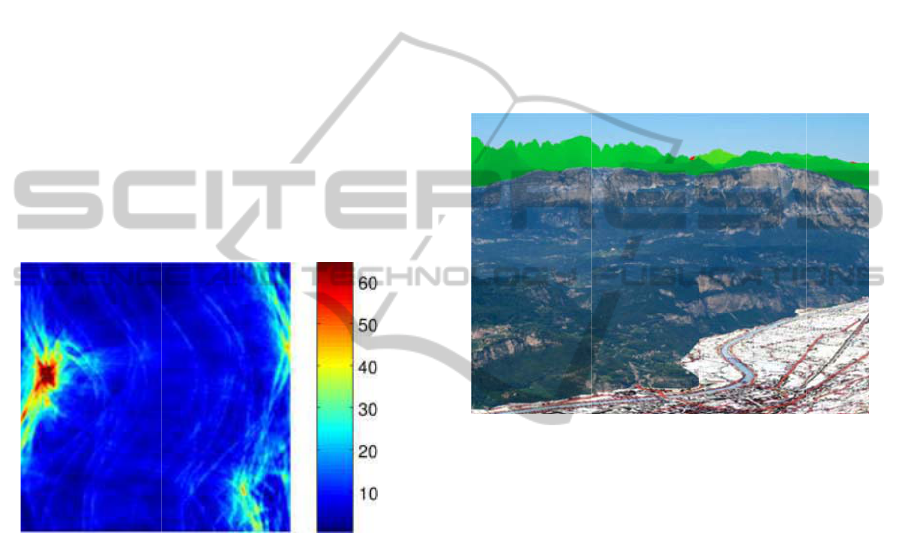
Figure 3: Fl
o
u
re 4: Tree c
o
r
ine Land cove
r
3D terrain m
o
f
ile lines). In t
h
n
sparent to illus
t
To increase
r
n
also be incl
u
u
re 4), urb
a
r
acted with
a
c
hine learnin
g
To provide
o
e
s, a visual
p
lemented i
n
a
luate corresp
l
es through
i
mization alg
o
a
meters th
a
g
nment. This
h
austively ev
a
a
meters (sa
m
w
ever, ve
r
n
sequently,
w
e
shift and t
m
the work b
y
d from the r
e
t
he synthetic
o
the presenc
e
b
jects), unev
e
t
rong shado
w
.
o
wchart of the
a
o
verage GIS d
a
r
2000 (purple
)
o
del (indicate
d
h
is image the
3
t
rate photo-mo
d
r
obustness, re
g
u
ded, e.g. sk
y
a
n-forest, or
a
ppropriate i
m
g
approaches.
o
ptimal align
m
registration
n
side an it
e
o
ndences on
an optimiz
a
o
rith
m
aims t
t
produce
procedure
c
a
luating the
m
pled on a
r
y comput
a
w
e perform
p
t
exture disco
n
y
(He et al. 2
0
e
al world ob
s
image, are
n
e
of occlusio
n
e
n illuminati
o
w
s) and poor
alignment pro
c
ata taken fro
m
)
has been ren
d
d
by blue and
3
D model has
b
d
el registratio
n
gion boundar
y
y
-rock, veget
a
combinatio
n
i
mage proce
s
m
en
t
, even i
n
algorith
m
h
e
rative proc
e
both local a
n
a
tion proced
u
t
o find the ca
m
the most
c
an be perf
o
full range o
finite grid).
t
ationally
i
p
rofile align
m
n
tinuities,
0
09). The
s
ervation,
n
oisy and
n
s (clouds
o
n (which
visibility
c
ess.
m
the 25m
d
ered onto
red depth
b
een made
.
y
profiles
a
tion (see
thereof,
s
sing and
n
difficult
h
as been
e
dure to
n
d global
u
re. This
m
era lens
accurate
o
rmed by
f camera
This is,
i
ntensive.
m
ent in a
Geo-positionalImageForensicsthroughScene-terrainRegistration
43
similar
m
2011),
a
b
ased o
n
Rockmo
equally
system.
T
through
Let
function
s
spherica
l
whilst
image.
W
,,
three ro
t
applied
t
(1) sho
w
estimate
d
b
etween
Figure 5
sampled
reference
and blue
angles.
The
spherica
l
alignme
n
correlati
o
the resu
l
Figure 5
.
3 B
E
M
A
As a dir
e
sky pixe
location
s
m
anner to th
a
a
nd compute
n
the method
d
re, 2008), u
spaced gri
d
T
his approac
h
example:
and
s, where
∈
l
domain.
r
refers to fe
W
e are sear
c
∈3,
o
t
ations with
E
to , maxim
i
w
s how the ‘
g
d
by com
p
and afte
r
: Spherical c
r
on a equall
y
system. The r
e
the worst; the
maximum v
a
l
coordinate
s
n
t that can b
e
o
n) between
t
l
ts from a ty
p
E
NEFITS
A
PPING
e
ct conseque
n
e
ls within a p
h
s
on the pl
a
a
t
p
roposed
b
a spherical
d
emonstrated
sing features
d
in the sp
h
h
can be expl
a
represent
∈
is a p
o
r
efers to the
s
atures extrac
t
c
hing for an
o
btained by t
h
E
uler angles
i
zes the mat
c
g
oodness’ of
p
uting the
c
r
the rotation.
r
oss correlatio
n
y
spaced gri
d
e
d region repre
s
x and y axes r
e
a
lue of such
s
correspond
s
e
achieved (i
n
t
he two spher
i
p
ical alignme
n
OF PIXE
L
n
ce of
p
rofile
h
oto can be a
s
a
net (i.e. la
t
b
y (Baboud e
t
cross correl
a
by (Kostelec
sampled o
n
h
erical refer
e
a
ined more cl
e
the two sphe
r
o
sition in the
s
ynthetic feat
u
t
ed from the
optimal rot
a
h
e compositi
o
,,, that,
o
c
hing . Equ
a
t
he match ca
n
c
ross correl
a
n
between fea
t
d
in the sph
e
s
ents the best
m
e
late to pan an
a correlatio
n
s
to the opt
i
n
terms of c
r
i
cal functions,
n
t can be se
e
L
-GEO
registration,
n
s
signed to rea
l
t
itude, longi
t
t
al.,
a
tion
and
n
an
e
nce
e
arly
rical
2D
u
res,
real
a
tion
o
n of
o
nce
a
tion
n
be
a
tion
(1)
a
tures
e
rical
m
atch
n
d tilt
n
in
t
imal
r
oss-
,
and
e
n in
n
on-
l 3D
t
ude,
alti
t
•
ret
r
•
•
for
e
inf
o
or
p
Th
e
wit
h
a u
evi
d
ret
r
Fig
u
dist
rel
e
als
o
ras
t
sat
e
p
at
h
ov
e
in
F
ge
o
si
m
tha
n
sy
n
clo
s
an
a
cor
r
4
To
ca
n
sec
t
t
ude). This m
a
3D depth
p
r
ieve world c
o
re-
p
hotograp
h
retrospective
e
nsics team
o
rmation; thu
s
p
otentially re
v
e
possibility t
o
h
geographic
a
ser with the
a
d
ence that w
o
r
ieve or prove
u
re 6: Substit
u
a
nce from obs
e
Apart from a
n
e
vant geo-ref
e
o
drape GIS
l
t
er (e.g. m
a
e
llite data)
a
h
s, regions,
b
e
rlay can be
s
F
igure 6. In
o
-referenced
m
ultaneously
(
n
20km away
n
thetic colou
r
s
er and red f
a
a
ltitude of le
s
r
esponding p
i
FOREN
S
illustrate the
n
be tackled
t
ion provide
s
a
pping enabl
e
p
erception fr
o
o
-ordinates fr
o
h
y (Bae et al.,
augmentati
o
to insert
s
, corroborati
n
v
ealing manip
u
o
automatical
l
a
lly accurate
i
a
bility to dis
c
o
uld have oth
e
.
u
tion of pixels
e
rver and altitu
d
n
notating a p
h
e
renced poin
t
l
ayer inside i
a
ps, other
g
n
d vector d
a
oundaries).
A
s
een in the c
o
this image,
t
layers ha
v
p
ixels mappi
n
from the ca
m
r
representin
g
a
rther away),
s
s than 200m
x
els from a c
a
S
IC EXP
E
uses and ty
p
using scene
-
a few real-
l
e
s:
o
m 2D ima
g
o
m an image
r
,
2010),
o
n (i.e. faci
l
and/or ex
t
n
g embedded
ulation.
ly enrich a p
h
information
e
c
over elusive
e
rwise been
d
with geo-data
,
d
e.
h
oto with top
t
s of interes
t
i
t, both in th
e
g
eo-registere
d
a
ta (e.g. roa
d
A
n example o
o
mposite ima
g
t
wo different
v
e been
v
n
g to locatio
n
m
era were rep
l
g depth (d
a
and pixels m
were replace
d
a
rtographic
m
E
RIMEN
T
p
e of proble
m
-
model matc
h
life cases w
h
g
es (e.g.
r
egion),
l
itating a
t
ract 3D
evidence
h
otograph
e
mpowers
pieces of
ifficult to
,
based on
onyms or
, we can
e
form of
d
photos,
d
, rivers,
f
such an
g
e shown
types of
v
isualized
n
s further
aced by a
a
rk green
a
pping to
d
by geo-
m
ap.
T
S
m
s which
h
ing, this
h
ere geo-
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
44

verificat
i
example
results
B
4.1
B
With a
p
highest
m
geo-
p
os
i
Christia
n
ambitio
n
Seven
S
highest
p
Con
d
K2 Bas
e
attempt.
solo att
e
returned
,
12 Aug
u
other s
u
received
To v
a
self-
p
or
t
summit
speciali
z
Figure 7:
Explorer
s
As
c
glacier j
an idea
l
study.
Figu
r
findings
describe
d
The
u
Internet
Camp 3
Lon: 0
7
renderin
g
images
a
i
on has reve
a
s of registere
B
log
4
.
B
o
g
us K2 S
p
eak elevatio
n
m
ountain on
i
tional image
n
Stangl, a fa
n
is to be the
fi
S
ummits ch
a
p
eaks on each
d
itions were
h
e
Camp in th
e
Stangl left
B
e
mpt. After a
, claiming th
a
u
st. Given t
h
u
spicious in
d
with sceptici
a
lidate his cl
a
t
rait photogr
a
(see Figure
7
z
ed magazine
s
:
Self portrait
s
Web as proof
o
c
an be seen,
ust visible o
v
l
case for a
r
e 8 illustra
t
using the f
o
d
in this pape
r
u
pper two i
m
sourced pho
t
o
on K2 (appro
7
6.531°E, A
l
g
from the s
a
a
re an excerpt
a
le
d
interesti
n
d images ca
n
ummitin
g
n
of 8611m,
K
Earth. In th
i
forensic anal
y
mous Austri
a
fi
rst man to c
o
a
llenge
5
, cli
m
of the seven
c
h
arsh when St
a
e
summer of
2
B
ase Camp o
n
70-hour long
a
t he had topp
e
h
e prohibitiv
e
coherencies,
s
m
among fe
l
a
im, Stangl q
u
a
ph suppose
d
7
), but devoi
d
s
and website
s
of Christian S
o
f climbing K2
there is a s
m
v
er his right
s
geo-
p
osition
a
t
es a visual
o
rensic tool
w
r
.
m
ages show a
n
o
known to h
ximate locati
o
l
t: 7250m)
a
me view poi
n
from a phot
o
n
g results. Fu
r
n
be found o
n
K
2 is the sec
o
i
s case study
,
y
sis is focuse
d
a
n climber, w
h
o
mplete the T
r
m
bing the
t
c
ontinents.
a
ngl arrived a
t
2
010 for his
t
n
10 August
f
summit pus
h
ed
-out at 10a
m
e
conditions
his claim
low climbers
.
u
ickly submit
t
d
ly taken on
d
of meta-dat
a
s
6
.
tangl, submitt
e
.
m
all portion
o
s
houlder, off
e
a
l image for
e
summary of
w
e developed
n
excerpt fro
m
ave been tak
e
o
n Lat: 35.87
5
and a synt
h
n
t. The lower
o
taken at the
p
r
ther
n
our
o
n
d
-
,
the
d
on
h
ose
r
iple
t
hree
a
t the
t
hird
f
or a
h
, he
m
on
and
was
.
t
ed a
the
a
, to
e
d to
of a
e
ring
e
nsic
our
an
d
m
an
e
n at
5
°N,
h
etic
two
p
eak
of
K
b
y
sy
n
sh
o
str
e
Sta
n
Fig
u
fro
m
su
m
fro
m
in
a
too
l
co
n
35.
8
35.
7
fro
m
tak
e
an
d
edi
t
tec
h
p
h
o
co
m
su
m
ha
v
the
i
wit
h
tha
t
sca
n
4.
2
An
o
im
a
b
ut
Fig
K
2 (Lat: 35.8
8
Czech clim
b
n
thetic rende
r
o
wn. The ce
n
e
tched, excer
p
n
gl, shown in
u
re 8: (top ro
w
m
Camp 3;
(
m
mit photo; (b
o
m
K2 summit.
N
a
ll images. Synt
h
The three ph
o
l
and into
e
n
necting vect
o
8
02°N, Lon
:
7
04°N, Lon:
m
this analys
i
e
n from a lo
c
d
not from the
At the time
t
ors of Ex
p
h
nique: direc
t
o
to in a b
o
m
position and
m
mit shot ont
o
v
e been take
n
i
r doubts. Ine
h
Explorers
W
t
he had fa
k
n
dal in the m
o
2
Fake
M
o
ther interes
t
a
ge forensic s
t
predic
t
able
g
u
re 9.
8
1°N, Lon: 0
7
b
er Libor
U
i
ng from th
e
n
tral image i
s
p
t from the sa
m
Figure 7.
w
) Photo crop
centre) crop
f
o
ttom row) cro
p
N
ote: same 3
D
h
etic colourin
g
o
tographs we
r
ach, a pair
o
r were insert
e
076.541°E,
076.542°E, 4
i
s, the photo
i
c
ation very cl
o
summit.
of the orig
i
p
lorersWeb
8
t
image com
p
o
ok that ha
d
managed to
o
o
it. This pho
n
from Cam
p
v
itably, whe
n
W
eb’s analysis
,
k
ed the clim
b
o
untaineering
M
oon
t
ing exampl
e
t
udy using th
e
g
eo-reference
a
7
6.514°E, Al
t
U
he
r
7
, and li
k
e
same view
s
a crop, an
d
m
e photo sub
m
and synthetic
from Stangl's
p
and syntheti
c
D
coordinate p
a
g
relative to hei
g
re registered
u
of 3D poin
t
e
d into the sc
e
,
6234 m
a
4
688 m). As
i
i
n question
w
l
ose to that o
f
i
nal investig
a
used a m
o
p
arison
9
. The
y
a
d exactly t
h
o
verlay Stan
g
o
tograph was
k
p
3 so thus
c
n
Stangl was
p
, he decided
t
m
b, generatin
g
community.
e
of a geo-
p
e
Moon as a
n
a
ble object is
t
: 8611m)
k
ewise a
point is
d
contrast
m
itted by
rendering
supposed
c
rendering
a
irs drawn
g
ht.
u
sing our
t
s with a
e
nes (Lat:
a
nd Lat:
i
s evident
w
as in fact
f
Camp 3
a
tion, the
o
re basic
y
found a
h
e same
g
l’s (fake)
k
nown to
c
onfirmed
p
resented
t
o confess
g
a huge
p
ositional
n
on-static
shown in
Geo-positionalImageForensicsthroughScene-terrainRegistration
45

Figure 9: Conjunction of the Moon, Jupiter and Venus,
Palermo, Italy. (left) Photo from Flickr with artificially
enlarged Moon; (right) adjusted version of original photo,
with Moon resized and repositioned according to EXIF
location and time data.
In this popular Flickr image
10
, the size of the
Moon looks suspiciously large, therefore scene
topology matching methods were applied to
understand if it was authentic. The stated location of
the geo-tagged Flickr image was Lat: 38.1713°N,
Lon: 013.3439°E and the time reported in the EXIF
was 2008:11:30 18:32:45.
Given these constraints, our tool was used to
register the photograph to a 3D synthetic model for
that region. As the registration process delivers the
relative distances and thus camera calibration
parameters, we can determine that the Moon in this
photo appears to span 5.6° of the sky. In reality, the
apparent diameter of the Moon as viewed from any
point on Earth, is always approximately 0.5°, hence
it was over 10 times too large. Interestingly, the
proportion of the Lunar surface bathed in light was
correct, at about 7.9%, so it is suspected that two
photos from the same evening had been merged. The
location of the Moon in the sky was also incorrect,
as it should have been present at 234.04° azimuth
and 2.07° altitude (derived from web-based celestial
almanacs and the EXIF time).
Based on these findings, a new image (see right
of Figure 9) was generated using Photoshop to
illustrate the correct size and correct location of the
Moon in the sky, based on the original EXIF meta-
data; the visible mountains and their relative
distances from the observer have also been labeled
using GeoNames
11
toponym database. As is evident,
the Moon’s real location should have been just
above the rightmost peak, Pizzo Vuturo, producing a
less provocative image. Incidentally, the planets
Venus and Jupiter are also visible, and had likewise
been subjected to the same up-scaling and
repositioning for visual effect.
5 CONCLUSIONS
In this paper, we have presented a system for geo-
forensic analysis using computer vision and graphics
techniques. The power of such a cross-modal
correlation approach has been exemplified through
three case-studies, in which claims were disproved,
truths revealed or doubts confirmed.
The relative novelty of geo-tagging photos
together with the scale and diversity of urban and
natural landscapes means that the approaches
detailed herein are not suitable for all scenarios.
Images containing nondescript content, e.g. indoors,
gently rolling countryside and deserts, cannot
provide sufficient clues to uniquely pinpoint location
or time. However, as more sources of geo-referenced
material, e.g. Points of Interest, geo-tagged photos
and accurate 3D urban models (like those being
created in GoogleSketchUp
12
or OpenStreetMap
13
)
become publicly available, the potential to exploit
the methods described here will increase
correspondingly
ACKNOWLEDGEMENTS
This research has been partly funded by the
European 7
th
Framework Program, under grant
VENTURI
14
(FP7-288238).
REFERENCES
Baatz, G., Saurer, O., Koeser K. and Pollefeys M. (2012).
Large Scale Visual Geo-Localization of Images in
Mountainous Terrain. In Proc. European Conference
on Computer Vision.
Baboud, L., Cadik, M., Eisemann, E. and Seidel, H.
(2011). Automatic photo-to-terrain alignment for the
annotation of mountain pictures. In IEEE Conference
on Computer Vision and Pattern Recognition, 41-48.
Bae, S., Agarwala, A. and Durand, F. (2010).
Computational rephotography. In ACM Trans. Graph
29(3), 1-15.
Boehme, R., Freiling, F., Gloe T. and Kirchner, M. (2009).
Multimedia forensics is not computer forensics. In
Computational Forensics, Lecture Notes in Computer
Science, vol. 5718, 90-103.
Casey, E. (2004). Digital evidence and computer crime. In
Forensic science, computers and the Internet,
Academic Press.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
46

Chippendale, P., Zanin, M. and Andreatta, C. (2009).
Collective photography. In Conference for Visual
Media Production, 188-194.
Cui, Y. and Ge, S. (2003). Autonomous vehicle
positioning with GPS in urban canyon environments.
In IEEE Transactions on Robotics and Automation
19(1), 15-25.
Guidi, G., Beraldin, J., Ciofi, S. and Atzeni, C. (2003).
Fusion of range camera and photogrammetry: a
systematic procedure for improving 3-d models metric
accuracy”. In IEEE Transactions on Systems, Man,
and Cybernetics, Part B: Cybernetics 33(4), 667-676.
Hays, J. and Efros, A. (2008). Im2gps: estimating
geographic information from a single image. In IEEE
Conference on Computer Vision and Pattern
Recognition, 1-8.
He, K., Sun, J., Tang, X. (2009). Single image haze
removal using dark channel prior. In Computer Vision
and Pattern Recognition, 1956–1963.
Karpischek, S., Marforio, C., Godenzi, M., Heuel, S. and
Michahelles, F. (2009). Swisspeaks–mobile
augmented reality to identify mountains. In Workshop
at the International Symposium on Mixed and
Augmented Reality.
Kostelec, P. and Rockmore, D. (2008). FFTs on the
rotation group. In Journal of Fourier Analysis and
Applications 14(2), 145-179.
Leotta, M. and Mundy, J. (2011). Vehicle surveillance
with a generic, adaptive, 3d vehicle model. In IEEE
Transactions on Pattern Analysis and Machine
Intelligence 33(7), 1457-1469.
Li, Z., Zhu, Q. and Gold C. (2005). Digital terrain
modeling: principles and methodology. In CRC Press.
Luo, J., Joshi, D., Yu, J. and Gallagher A. (2011).
Geotagging in multimedia and computer vision – a
survey. In Multimedia Tools and Applications 51, 187-
211.
Paek, J., Kim, J. and Govindan, P. (2010). Energy-ecient
rate-adaptive GPS-based positioning for smartphones.
In Proceedings of the 8th international conference on
Mobile systems, applications, and services, MobiSys
’10, 299-314.
1
http://3dnature.com/wcs6info.html
2
http://3dnature.com/vnsinfo.html
3
http://www.panoramio.com/
4
http://tev.fbk.eu/marmota/blog/mosaic/
5
http://skyrunning.at/en
6
http://www.explorersweb.com/everest_k2/news.php?id=19634
7
http://cs.wikipedia.org/wiki/Soubor:Liban_K2_sumit_1_resize.JPG
8
http://www.explorersweb.com/
9
http://www.explorersweb.com/everest_k2/news.php?id=19634
10
http://www.flickr.com/photos/lorca/3074227829/
11
http://www.geonames.org/
12
http://sketchup.google.com/
13
http://www.openstreetmap.org/
14
https://venturi.fbk.eu
Geo-positionalImageForensicsthroughScene-terrainRegistration
47
