
Design of a Rectangular-type Finger Rehabilitation Robot
Gab-Soon Kim
1
, Hyeon-Min Kim
1
Young-Guk Kim
1
, Hee-Suk Shin
2
and Jungwon Yoon
3
1
Department of Control and Instrumentation Engineering, ERI, Gyeongsang National University, Jinju, Republic of Korea
2
Department of Rehabilitation Medicine, School of Medicine, Gyeongsang National University, Jinju, Republic of Korea
3
School of Mechanical Engineering, Gyeongsang National University, Jinju, Republic of Korea
Keywords: Finger Rehabilitation, Rehabilitation Robot, Force Sensor, Intelligent Robot.
Abstract: This paper describes the development of a finger-rehabilitation robot for rehabilitating stroke patients'
fingers and other patient’s paralyzed fingers. The developed finger rehabilitation robot is composed of a
thumb-rehabilitation robot instrument and four finger rehabilitation robot instruments. The finger-
rehabilitation robot could exercise fingers of patient for their rehabilitation. A control characteristic test of
the developed rectangular-type finger-rehabilitation robot was carried out, and the results confirmed that the
robot could be used for the flexibility rehabilitation exercise for the fingers of normal person and patients.
1 INTRODUCTION
A stroke patient’s fingers and other patient’s
paralyzed fingers usually have reduced functions
unlike a normal person, because they usually have
varying weakness of force. Therefore, their fingers
undergo a rehabilitation exercise to rehabilitate their
initialization functions. The finger-rehabilitation
robot can spread out five fingers and turn them
inward perfectly. The robot must perform force
control procedures for the patients’ safety in the
finger-rehabilitation exercise, because the fingers of
patients have different spreading extents.
Brokaw developed a finger rehabilitation system
using a spring force which assists a stroke patient in
grasping an object. Ren developed a system which
could spread out and turn inward a patient’s thumb,
and a system which could spread out and turn
inward his/her four fingers. The weakness of that
system was that it could not exercise each finger
individually. Connelly developed the air pressure
gloves system which can blow and deflate air into a
patient’s gloved hand to spread the hand out and turn
the gloved fingers’ inward. The weaknesses of these
developed systems in the paper are that they cannot
exercise the spreading out patient’s fingers perfectly,
and they also can't safely be used in the exercise for
the rehabilitating of patients fingers because they
don’t have a force sensor and therefore don’t have
any force controls.
In this paper, the rectangular-type finger-
rehabilitation robot which can perform a flexibility
rehabilitation exercise was developed for fingers’
rehabilitation exercises. The links of five finger-
rehabilitation robot instruments were designed using
the software Matlab, after which the body of finger-
rehabilitation robot was designed and manufactured,
and then a control characteristic test of the
developed rectangular-type finger-rehabilitation
robot was carried out.
2 DESIGN AND MANUFACTURE
OF ROBOT
2.1 Design of the Links’ Lengths of the
Finger-rehabilitation Robot
In order to design the finger-rehabilitation robot
instruments, the lengths of a hand and each finger is
measured. After which, the movements that spread
out fingers and turn the fingers inward are simulated
with their data collected to get the links’ lengths.
The average length of a hand, each finger and each
knuckle were measured from ten university students,
and they are as follows; the length of thumb is
68mm, that of forefinger is 101 mm, that of middle
finger 114 mm, that of ring finger 105 mm, that of
little finger 87 mm. The spreading angle of each
finger is about 85. The values are to design each
finger-rehabilitation robot instrument in the
simulation.
443
Kim G., Kim H., Kim Y., Shin H. and Yoon J..
Design of a Rectangular-type Finger Rehabilitation Robot.
DOI: 10.5220/0004033204430446
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 443-446
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
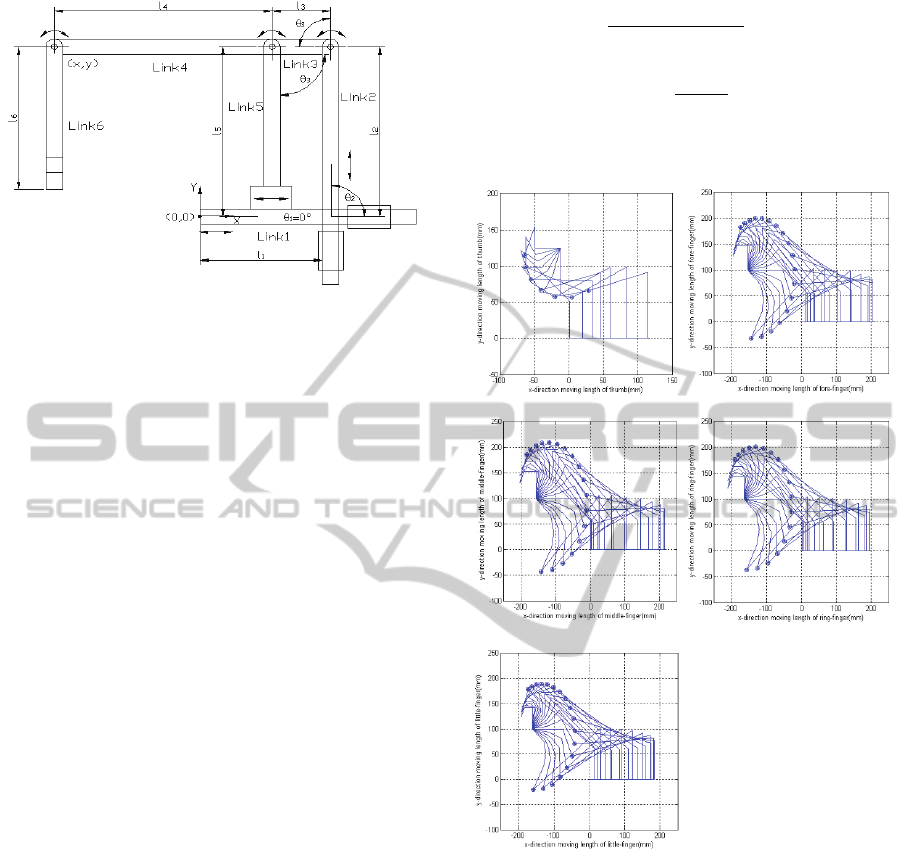
Figure 1: Schematic diagram of links for the finger-
rehabilitation robot instrument.
Figure 1 shows schematic diagram of the links of
finger-rehabilitation robot instrument for the
simulation, and these are composed of link 1~6 with
each length of l1, l2, l3, l4, l5 and l6, the angle
between the length direction Link 1 and horizontal
axis is θ
1
, the angle between Link 1 and Link 2 is θ
2
,
the angle between Link 2 and Link 3 is θ
3
. The
structure of the finger-rehabilitation robot instrument
is as follows; each finger’s end knuckle is fixed to
the end of Link 6, Link 3 and Link 4 are composed
of a body, Link 2, Link 5 and Link 6 are jointed to
Link 3 and Link 4, and Link 1 and Link2 move in a
horizontal direction and vertical direction
respectively. In the simulation, the horizontal length
of Link 1, the vertical length of Link 2 and the angle
(θ
3
) between Link 2 and Link 3 are made in
accordance to the movement of the jointed point (x,
y), and they then spread out the fingers and turn
them inwards. The horizontal length of Link 3 and
the vertical length of Link 4 are derived through a
simulation using the software MATLAB. In order to
create the simulation, equations of forward
kinematics and inverse kinematics must be derived.
If x and y are variables, the equations of forward
kinematics could be derived. The equation for
calculating x can be written as follow.
3431
sin)(
lllx
(1)
The equation for calculating y can be written as
follow.
3432
cos)(
llly
(2)
If the lengths of Link 3, Link 4 and Link 5 (l3,
l4, l5) and x, y are considered constant,
)/)(cos
3263
lll
, is the equation of reverse
kinematics, the variables l1, l2, θ
3
can be determined
as follows.
4
6343
2
))((
l
lylll
l
(3)
)(cos
3
26
1
3
l
ll
(4)
3431
sin)(
llxl
(5)
(a) Thumb
(b) Forefinger
(c) Middle finger
(d) Ring finger
(e) Little finger
Figure 2: Graph of the simulation results for the finger-
rehabilitation robot instruments.
The simulation of each finger is carried out from
the turned inward finger to the spread out of said
finger. The lengths of Link 6 and Link3+Link4 for
the thumb are 46mm and 90mm respectively, and
those for middle finger are 76mm and 225mm
respectively. The lengths of forefinger, ring finger
and little finger are determined by the equal size of
those of middle finger, because the length of middle
finger is the greatest. The (a), (b), (c), (d) and (e) of
Figure 2 which are depicted graphic form show the
results of the simulation using the finger-
rehabilitation instruments from the turned inward
fingers to spread out fingers. When the thumb is
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
444
divided into six sections from the turned inward
finger (0°) to spread out finger (84°) with an interval
of 14°, the horizontal moving distance (x) of Link 1
is 114.4mm, the vertical moving distance (y) of Link
2 is 43.4mm, and the rotational angle between Link
2 and Link 3 is 60.1°. When the four fingers
(forefinger, middle finger, ring finger and little
finger) are divided into seventeen sections from the
turned inward finger (0°) to the spread out finger
(85°) with the interval of 5°, the horizontal moving
distance (x) of Link 1 for each finger is 192.2mm,
214.0mm, 195.4mm and 167.0mm, the vertical
moving distance (y) of Link 2 for each finger is
43.4mm, 54.8mm, 51.1mm and 45.4mm, and the
rotational angle between Link 2 and Link 3 for each
finger is 60.1°, 86.5°, 80.1° and 69.2°, respectively.
As a result of the simulation, the length of Link 6
and Link 3+Link 4 of thumb-rehabilitation robot
instrument is 46mm and 90mm respectively, and
those of four finger-rehabilitation robot instrument
are 76mm and 225mm.
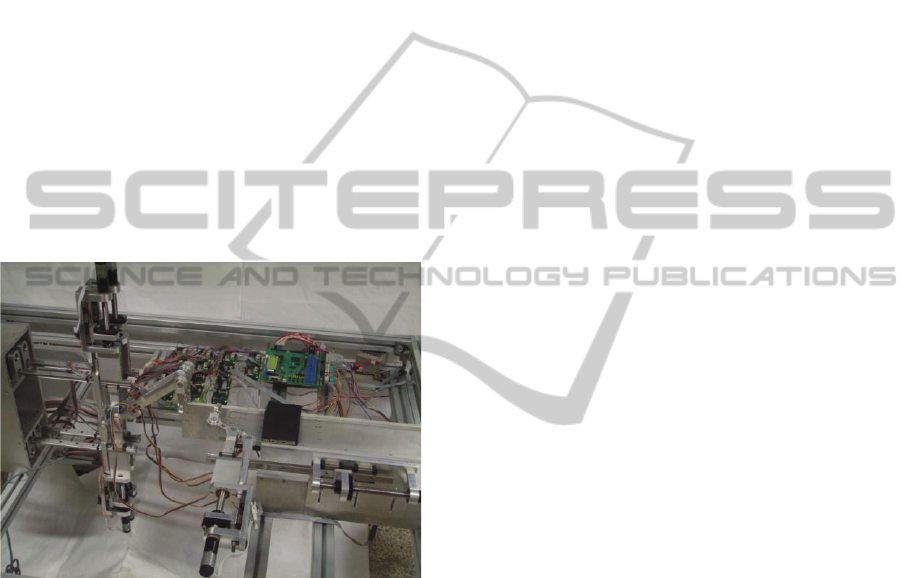
Figure 3: Photograph of the manufactured finger-
rehabilitation robot.
2.2 The Design and Manufacturing of
the Finger-rehabilitation Robot
The Figure 3 shows the photograph of the
manufactured finger-rehabilitation robot. The robot
is composed of a thumb and four finger-
rehabilitation robot instruments They are composed
of a hand support (body), a left and right moving
instrument for the thumb-rehabilitation robot
instrument, four up and down moving instruments
for the four finger-rehabilitation robot instruments,
five front and rear moving instruments for the thumb
and four finger-rehabilitation robot instruments, a
force measurement and transmitting instrument for
the thumb-rehabilitation robot instrument and four
force measurement and transmitting instruments for
the four finger-rehabilitation robot instruments.
The hand support (body) is used to fix patient’s
left hand, and is attached to the front and rear
moving instrument, and its dimensions are 220mm
in width, 451mm in length and 94mm in height.
Each instrument is composed of a LM guide
(RSR9KM), a ball screw (MTF1202-3.7), a motor
and gear (349380, 29:1) and a support, and they
vertically move the force measurement and
transmitting instrument up to 60mm, respectively.
The front and rear moving instrument of each finger-
rehabilitation robot instrument is fixed to the body
and the applied force to each finger is done by
moving each finger with the up and down moving
instrument in conjunction with each support of force
transmitting instrument. Each fixing block of the
each up and down moving instrument are attached to
a single LM guide rail with each of the front and rear
moving instruments. The horizontally movement of
the force measurement and transmitting instrument
is up to 300mm.
Each force measurement and transmitting
instrument of each finger-rehabilitation robot
instrument is composed of a finger fixing link, a
finger exercising link, a support and an upper and
lower moving block. The four two-axis force sensors
which measures Fx force and Fy force are
manufactured for four finger-rehabilitation robot
instruments, and they are fixed to each finger
exercising link, and they each have the capacity of
100N. The sensors measure the pulling and pushing
forces of fingers. Each force measurement and
transmitting instrument is connected to the center of
each fixing support and the end of each up and down
moving instrument, respectively.
2.3 Control Characteristic Test of
Finger-rehabilitation Robot
The flexibility rehabilitation exercise is performed
for improving the flexibility of the hardened five
fingers, and it is during these exercises which the
fingers are spread out and turn inward according to
the drawing trace of the last knuckle. Figure 4 shows
the photographs of the characteristic test for
flexibility rehabilitation exercise using finger-
rehabilitation robot instrument.
Figure 5 shows the graphs of the flexibility
rehabilitation exercises using the finger-
rehabilitation robot. The graphs showed in the cases
of the spreading out of the thumb, forefinger, middle
finger and ring finger, that the forces were between
the range of 0~22s and each had a maximum force
Design of a Rectangular-type Finger Rehabilitation Robot
445
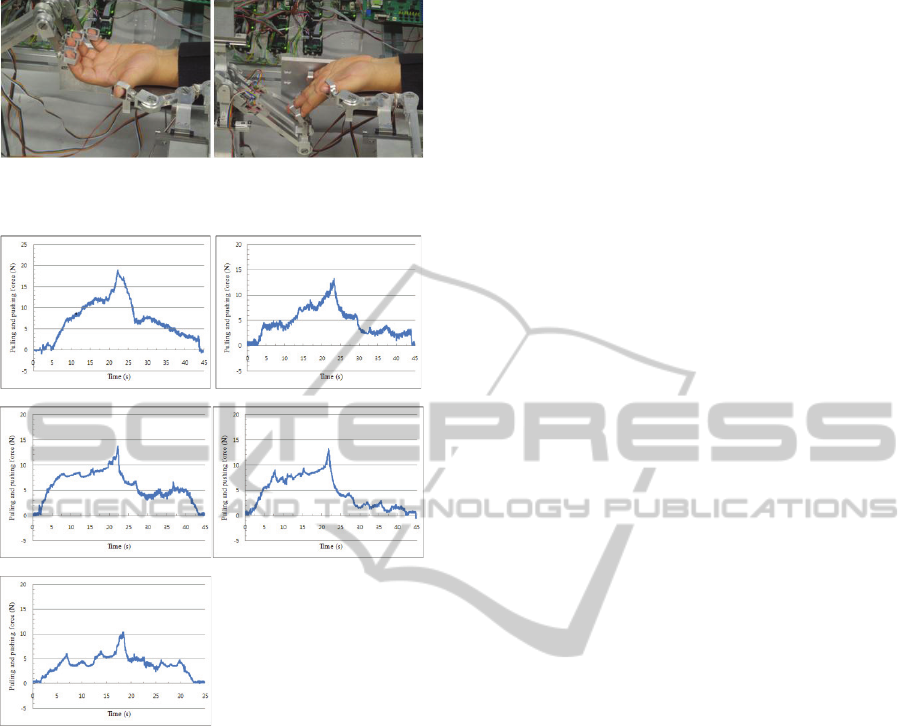
Figure 4: Photographs of characteristic test for finger-
rehabilitation robot instrument.
(a) Thumb
(b) Forefinger
(c) Middle finger
(d) Ring finger
(e) Little finger
Figure 5: Graphs of flexibility rehabilitation exercises.
of about 18N, 13Nm 14N and 13N with reaches of
about 22s. In cases where the fingers were turned
inward the measured forces were decreased by about
22s respectively. In case of the spreading out of the
little finger the graph showed, the forces were
between the ranges of 0~17s with a maximum force
of about 10N with reaches of about 17s. In case of
the little finger being turned inward, the measured
force was decreased by about 17s. The graphs
showed that the progressions of the tests of thumb,
forefinger, middle finger and ring finger, and little
finger were finished within 45s, and 34s
respectively, because the robot could stop after
spreading out the fingers perfectly and would then
return to the starting position. Thus, the finger-
rehabilitation robot instruments could be used for the
finger-flexibility rehabilitation exercises of
rehabilitating patients’ fingers.
3 CONCLUSIONS
The purpose of this paper is to showcase the
rectangular-type finger rehabilitation robot which
can perform both the flexibility rehabilitation
exercise. The operating characteristic test of each
fingers’ rehabilitation robot instrument was carried
out using five fingers of normal person, and the
characteristic tests were safely operated in the
flexibility rehabilitation exercise.
ACKNOWLEDGEMENTS
This research was supported by Basic Science
Research Program through the National Research
Foundation of Korea (NRF) funded by the Ministry
of Education, Science and technology (2010-
0087281)
REFERENCES
Brokaw, E. B., Holley, R. J., Lum, P.S., 2010. Hand
Spring Operated Movement Enhancer (HandSOME)
Device for Hand Rehabilitation after Stroke.
Engineering in Medicine and Biology Society
(EMBC), 2010 Annual International Conference of the
IEEE. pp. 5867-5870.
Ren, Y., Park, H. S., Zhang, L. Q., 2009. Developing a
whole-arm exoskeleton robot with hand opening and
closing mechanism for upper limb stroke rehabilitation.
Rehabilitation Robotics, 2009. ICORR 2009. IEEE
International Conference on. pp. 761-765.
Connelly, L., Jia, Y., Toro, M. L., Stoykov, M. E., Kenyon,
R. V., Kamper, D. G., 2010. A Pneumatic Glove and
Immersive Virtual Reality Environment for Hand
Rehabilitative Training After Stroke. Neural Systems
and Rehabilitation Engineering, IEEE Transactions
on. vol. 18, no. 5, pp. 551-559.
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
446
