
MODELLING MICROSCOPIC PEDESTRIAN MOBILITY USING
BLUETOOTH
Thomas Liebig
1
and Armel Ulrich Kemloh Wagoum
2
1
Fraunhofer IAIS, Schloss Birlinghoven, 53754 Sankt Augustin, Germany
2
Forschungszentrum J
¨
ulich GmbH, JSC, 52425 J
¨
ulich, Germany
Keywords:
Bluetooth tracking, Event monitoring, Pedestrian dynamics, Route choice.
Abstract:
Emergence of Bluetooth tracking technology for event monitoring is currently applied to extract individual
pathways, movement patterns or to rank popularity of locations by their visitor quantities. The next steps
are to achieve short term movement predictions, to understand people’s motivations and to come up with
microscopic traffic values. This work proposes a solution for these questions, namely, the combination of
recorded values with a microsimulation. In our presented framework, simulated pedestrians move from one
decision area to the next one in a navigation graph. The graph is automatically generated from the facility
based on the inter-visibility of the exits. Intermediate areas are inserted if needed. With the data obtained
from the Bluetooth scanners, individual pathways of pedestrians are determined. The routing algorithm will
then use those information to adjust the pathways of the agents in the simulation. An accurate reproduction of
pedestrian route choice in a complex facility is expected.
1 INTRODUCTION
Major public events as concerts and soccer matches
which attract thousands or billions of visitors are on
one hand a great chance for street marketers and ad-
vertisement companies but on the other hand also a
growing financial risk for the organizers and a safety
hazard for the guests themselves, due to huge ex-
penses and high visitor densities. Understanding the
movement behaviour, identification of attractors and
distractors, determination of waiting times, as well as
localization of congestions and bottle-necks gives in-
sights on visitor preferences and motivations during a
particular event. Knowing such detailed information
on visitor behaviour helps not just at the next sim-
ilar event, but is also a location-based performance
indicator for the event itself. Various locations and
attractions can be ranked by their popularity, safety
or frequency. Currently used technologies to mea-
sure these highly needed microscopic movement val-
ues are surveys and video surveillances. Whereas the
first solution (surveys) is expensive and hardly repre-
sentative due to the non-random sampling among all
visitors the second one (video surveillance) depends
on weather, brightness and density of the people and
does not seldom require special scaffoldings to carry
the cameras.
Within this work we propose a novel four stage
approach to monitor microscopic pedestrian move-
ment during events. Our system is cheap, fast de-
ployable and it is independent from the pre-existing
technical infrastructure. The sensor technology we
use, can be applied seamlessly to monitor indoor and
outdoor movement, which offers the chance to track
peoples movement during their whole stay (e.g. start-
ing at the arrival by car, during the event and leav-
ing again by car after the event). We utilize recently
evolved, Bluetooth-scanners (Bruno and Delmastro,
2003; Fuller, 2009) to record people’s presence (step
1). This is basically a mesh of radio frequency sensors
of certain diameters (depending on the used Bluetooth
hardware 10 m, 20m or 100m). Whenever a person
with a Bluetooth enabled device (e.g. a mobile phone
or an intercom) passes the footprint of a sensor, an en-
try is attached to a data-log storing the time-stamp, the
position and a unique id for this person. Each sensor
itself generates pedestrian counts. By use of multiple
sensors, movement patterns and transition times are
recorded. Expected representativeness is about 7 per-
cent of the people (Leitinger et al., 2010). The tech-
nology is already widely used for performance moni-
toring (Hagemann and Weinzerl, 2008; Stange et al.,
2011) which just depends on macroscopic movement
values. To extend this as well to microscopic features,
270
Liebig T. and Kemloh Wagoum A..
MODELLING MICROSCOPIC PEDESTRIAN MOBILITY USING BLUETOOTH.
DOI: 10.5220/0003833802700275
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 270-275
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
we adjust and apply (step 2) an agent simulation to the
recorded values. The analysis returns highly granular
values on pedestrian speeds, duration of stay, direc-
tion of movement and pedestrian counts. We apply
the proposed methods during a soccer match at Stade
des Costi
`
eres in N
ˆ
ımes, the achieved results will be
used later on by the local firefighters and forces.
The remainder of the paper is structured as fol-
lows: Section 2 gives a brief overview on event mon-
itoring and Bluetooth tracking systems. In section 3
our use case and the empirical data collection is de-
scribed. Based on this our novel microscopic mod-
elling method is introduced and explained by means
of the soccer match use case in section 4. The paper
ends with a summary and outlook in section 5.
2 RELATED WORK
Existing indoor tracking technologies are surveys and
video surveillances. Whereas the first solution (sur-
veys) is expensive and hardly representative due to the
non-random sampling among all visitors, the second
one (video surveillance) depends on weather, bright-
ness and density of the people and does not seldom
require special scaffoldings to carry the cameras. The
need for further robust passive localization technolo-
gies pushed development of sensors that are capa-
ble to monitor people’s movement. First choice is
to track most popular digital gadgets: mobile phones
and intercoms. Analysis of mobile network GSM
(Global System for Mobile Communications) log files
(Giannotti and Pedreschi, 2008) causes strong pri-
vacy objections. Besides, Bluetooth technology is an
emerging technology for monitoring tasks. Recently
evolved Bluetooth based mobility sensors have been
used for event monitoring at the Sziget festival in Bu-
dapest (Leitinger et al., 2010). There, a mesh of six
sensors has been placed at carefully selected places,
having an intermediate distance from 50m to 200m.
This work extracts the route choices and number of
people at particular locations but does not consider
any extraction of microscopic values. Besides event
monitoring, also other successful indoor applications
of Bluetooth scanners are described in literature. In
(Pels et al., 2005) various scanners were placed at
Dutch train stations to record transit travellers. In
(Hagemann and Weinzerl, 2008) not only the tran-
sit travellers are monitored but, by placing sensors
in public busses, also the performance of the public
transport network itself. Accurate locating and fol-
lowing of objects within complex facilities is as well
an important research topic (Hallberg et al., 2003).
So far Bluetooth tracking is used to monitor a
sample of visitors and extract their route choices. In
few works time-geography and movement patterns
are addressed (Stange et al., 2011). The next data
mining step is to combine recorded values with a
microsimulation to (1) achieve short term movement
predictions, (2) to understand people’s motivations
and (3) to come up with microscopic traffic values.
This challenge has not been addressed in mobility
mining and Bluetooth tracking literature, yet. The
next sections describe our novel approach to achieve
these goals.
3 PEDESTRIAN MONITORING
USE CASE
Arbitrary events require a flexible, robust and easy de-
ployable monitoring technology as they are varying in
space and time. Thus, we decide for recently evolved
Bluetooth-scanners (Fuller, 2009). The particular real
word scenario we focus within this work is a soccer
match at Stade des Costi
`
eres in N
ˆ
ımes, France. The
stadium has 18.364 seats and expects many visitors
since the local football team happened to play in the
second league. We deploy a mesh of 17 sensors at the
stadium in order to monitor people’s behaviour and
route choices. Afterwards, see section 4, we are going
to build a pedestrian model using the collected data,
which represents accurately route choices and pedes-
trian behaviour.
For microscopic event monitoring we propose a
four stage process (figure 1). In step 1, Survey De-
sign, basic parameters and decisions (e.g. number of
sensors, sensor placement, sensor form factor and an-
tennas) are made according to the particular applica-
tion needs. Step 2 is the Data Collection phase dur-
ing the event. Afterwards, step 3, Data Preparation
is required. In this step recorded values become tem-
porally aggregated to compensate asynchronous data
entries. During the final step 4, Microscopic Pedes-
trian Modelling the pedestrian simulation, which is
capable of route choice representation (see section 4),
becomes adjusted by the recorded values.
Figure 1: Workflow for microscopic event monitoring.
3.1 Sensorplacement and Data
Collection
The sensors we use contain multiple Bluetooth anten-
nas which search simultaneously for visible Bluetooth
devices within the sensor footprint. Thus, a complete
MODELLING MICROSCOPIC PEDESTRIAN MOBILITY USING BLUETOOTH
271

scan of the frequency band is accelerated and mov-
ing people are more likely to become detected while
they are crossing the footprint. Each time a Blue-
tooth device (e.g. smartphone or intercom) is seen
a data entry is stored in a file. This log-entry consists
of timestamp, sensor identifier, unique scrambled de-
vice identifier and the signal strength. The need to
scramble the device identifier results from the fact that
Bluetooth sensors collect privacy sensitive data. Ev-
ery Bluetooth chip is identifiable by its unique Media-
Access-Control-address (MAC). Hence, a Bluetooth
device (respectively a person) is detectable (and there-
fore trackable) beyond the spatial-temporal bound-
aries of an event. Hence, our Bluetooth-scanners save
just an anonymized identifier, valid for the time of
the monitored event. To scramble the MAC-address,
we embed the irreversible SHA-256 encryption al-
gorithm (National Institute of Standards and Tech-
nology, 2002) with an event specific random seed
into the sensor software. Thus, privacy of the mon-
itored pedestrians is preserved from the very first data
recording.
We use multiple of these Bluetooth-sensors,
which allow re-identification of the persons at various
locations. This allows recording of transition times,
stay times, movement patterns and movement prefer-
ences. The sensor locations were chosen carefully.
We placed one sensor at each entrance in order to
record visitors at their arrival and leaving of the sta-
dium. Additionally, sensors were place at the shops in
the uppermost floor. In intermediate floor levels, we
placed sensors as well at junctions. Finally, sensors
which monitor people’s presence during the match
were place in the corridors of the tribunes. In total we
placed 17 sensors but before the start of the match,
two sensors were removed by vandalism. The three-
dimensional sensor placement strategy is depicted in
figure 2.
3.2 Data Preparation
Every single sensor runs asynchronous and the max-
imum time for each Bluetooth scan may easily ex-
ceed the theoretical upper bound of 10.24s (Woodings
et al., 2001; Bruno and Delmastro, 2003). One rea-
son is the noisy environment during the event. Thus,
temporal filtering and spatial aggregation is necessary
to get a pure dataset. Duplicate entries are removed
from the dataset as well as devices which were only
detected once (spot readings). The sensors also record
by chance devices of non-interest (e.g. navigation
systems of passing cars or pedestrians at the border of
the event area). These artifacts are removed by ven-
dor filtering as well as spatial-temporal filtering. Fi-
Figure 2: Three-dimensional sensorplacement at Stade des
Costi
`
eres in N
ˆ
ımes, France.
nally, arbitrary jumps among sensor locations, result-
ing from overlapping sensors are also removed. For
this action, the spatial distances between sensor foot-
prints, time-stamp and duration of the stay are taken
into account to calculate speed and position changes
per time. This step was recently introduced in (Stange
et al., 2011).
After the data has been purified the dataset con-
tains sequences of positions visited per device en-
riched with the time-stamp and stay-time duration.
Thus, for every sensor location quantity of detected
visitors can be determined within a particular time-
interval. Additionally, movement patterns and dy-
namic information on popularity of footprint transi-
tions remained preserved in the data. In total we
recorded 553 distinct persons. Press
1
states that 3.898
spectators have been watching the match. This re-
sults in a coverage of about 14 percent which is by far
higher than the expectation given by (Leitinger et al.,
2010). These empirical recordings are utilized in the
subsequent micro simulation step (section 4) for ac-
curate route choice modelling.
4 MICROSCOPIC PEDESTRIAN
MODELLING
The framework used for describing pedestrian traffic
can be divided in a three-tier structure. One distin-
guishes between the strategic, the tactical and the op-
erational level (Hoogendoorn et al., 2002). The start
and the end trip for each pedestrian is usually known
in advance. At the strategic level pedestrians choose
1
http://www.foot-national.com/match-foot-nimes-
vannes-32912.html, last accessed 25.11.2011
ICAART 2012 - International Conference on Agents and Artificial Intelligence
272
their self estimated best route, among a collection of
different alternatives. This can be done based on ex-
perience. Examples could be the global shortest path
or the familiar path to a given destination. Short-terms
decisions are taken at the tactical level, avoiding jams
or switching to a faster route for instance. Basic rules
for motions are defined at the tactical level, these in-
clude accelerating, decelerating, stopping. The differ-
ent tiers have local interactions with each others.
There are mainly three different classes of models
for pedestrian dynamic at the operational level: cellu-
lar automata models (Blue and Adler, 2001; Kirch-
ner and Schadschneider, 2002), rule based models
(Thompson, 1994; Galea et al., 2004; Korhonen et al.,
2008; Raney and Nagel, 2006) and force based mod-
els (Helbing and Moln
´
ar, 1995; Yu et al., 2005). Cel-
lular automata have the advantage of being computa-
tionally efficient, but the resolution of the simulated
geometry is limited by the size of the cells. Force
based models usually operate on a continuous geom-
etry. They need more computations. For more about
the advantages and disadvantages of the individual
models we refer to (Schadschneider et al., 2009).
4.1 Force based Model
In our simulation the operational level of the pedes-
trian walking is described by the Generalized Cen-
trifugal Force Model (GCFM) (Chraibi et al., 2011)
which operates in continuous space. In the GCFM
at the operational level pedestrians are described with
ellipses with velocity dependent semi-axes. Faster el-
lipses (pedestrians) need more space in the moving di-
rection. The motion is ruled by the social forces (Hel-
bing and Moln
´
ar, 1995; Moln
´
ar, 1995). At each simu-
lation step the forces between the pedestrians and the
obstacles (e.g. walls) are computed. Given a pedes-
trian i with coordinates
−→
R
i
, the equation of motion is:
m
i
¨
−→
R
i
=
−→
F
i
=
−−→
F
drv
i
+
∑
j∈N
i
−−→
F
rep
i j
+
∑
w∈W
i
−−→
F
rep
iw
, (1)
where
−−→
F
rep
i j
denotes the repulsive force from pedes-
trian j acting on pedestrian i,
−−→
F
rep
iw
is the repulsive
force emerging from the obstacle w and
−−→
F
drv
i
is a driv-
ing force. m
i
is the mass of pedestrian i. N
i
is the set
of all pedestrians that influences pedestrian i and W
i
the set of walls or borders that acts on pedestrian i.
They are within a certain cut-off radius r
c
= 2m. This
model has been validated in corridors and bottlenecks
using the fundamental diagram. This model has al-
ready been used to perform simulations of a multipur-
pose arena (Holl and Seyfried, 2009; Seyfried et al.,
2010).
4.2 Pedestrians Route Choice
The route choice for pedestrians can be done using
navigation field (Hartmann, 2010; Guo and Huang,
2011). This approach is spread in the cellular au-
tomata area. Continuous models usually work on a
visibility graph, where the driven force of the simu-
lated agent points towards a node of the graph. The
strategies used are usually the shortest path combined
with the quickest path (Kretz, 2009; Kirik et al., 2009;
Helivaara et al., 2011; Kemloh Wagoum and Seyfried,
2011). These strategies are in most of the case vali-
dated using a visual assessment on some screenshots
taken from the simulation. Some experiments have
been conducted to determine pedestrians route choice
using video surveillance, but only on simple scenar-
ios, reducing the problem to an exit selection prob-
lem (Guo and Huang, 2011; Helivaara et al., 2011;
Lo et al., 2006). This is partially due to the fact that
in complex facilities pedestrians have to be tracked
across many rooms.
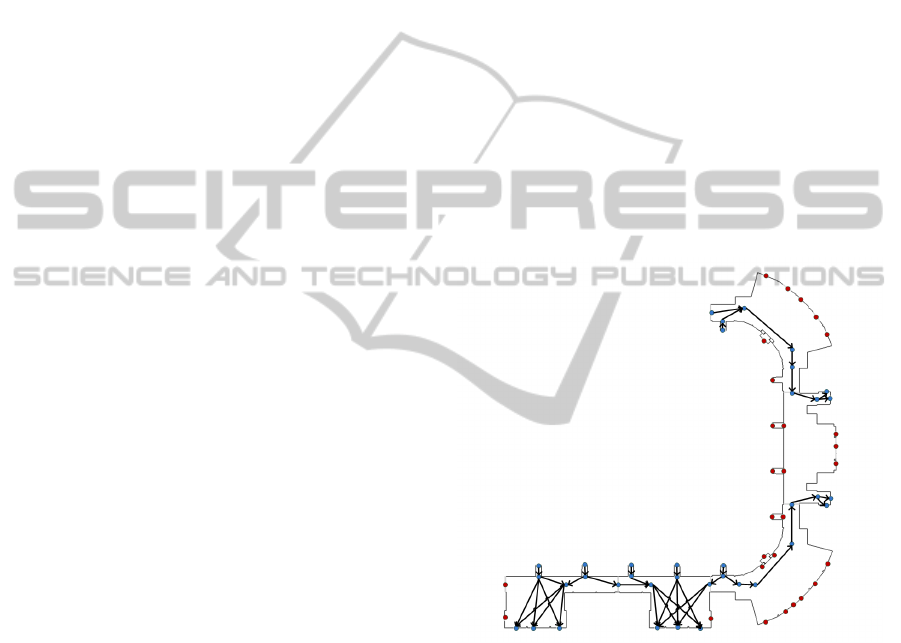
Figure 3: Example of a navigation graph generated from a
section of a stadium considering which exits are closed.
In the framework used here, pedestrians move
from one decision area to the next one. A decision
area is a place where the pedestrian decides which
way to go or change the current destination. Ideally
the decision areas are around the exits, which might
be relevant for an evacuation scenario. The navigation
network is automatically generated from the facility
based on the inter-visibility of the exits, intermediates
areas are inserted if needed. Visibility graphs can be
constructed using different algorithms (de Berg et al.,
2008; H
¨
ocker et al., 2010). In the case of an evacua-
tion scenario, the navigation graph can be limited to a
visibility graph. A sample navigation graph for a sec-
tion of a stadium is presented in Fig. 3. Pedestrians
MODELLING MICROSCOPIC PEDESTRIAN MOBILITY USING BLUETOOTH
273

are routed to the outside in this graph using four algo-
rithms: the local shortest path, the global shortest path
and a combination with the the quickest path (Kem-
loh Wagoum and Seyfried, 2011). This example is
suitable for an evacuation scenario where the pedestri-
ans might prefer the shortest or quickest path to reach
the outside. This approach is insufficient for nor-
mal day life situations, where the individual trips of
pedestrians are subjected to other motivations. Some
pedestrians might choose to go out the shortest way,
whereas others might feel more comfortable walking
along the promenade to get to some other points.
With the data obtained from the Bluetooth-
tracking system, it is possible to assign individual
destination and to calibrate the complete process of
the route choice. The routing algorithm will then use
the provided information to adjust the pathway of the
agents in the simulation. Accurate reproduction of
pedestrian route choice in complex facilities is ex-
pected.
5 CONCLUSIONS AND FUTURE
WORK
In this contribution Bluetooth tracking was applied at
events to monitor a sample of visitors and extract their
route choices. Individual pathways could be tracked
across many rooms. By sensor-design, the whole pro-
cess is at any time privacy preserving.
As part of the spatial knowledge discovery pro-
cess related works, analysing Bluetooth based mobil-
ity data, focussed on time-geography and movement
pattern analysis. Driven by major goals of mobility
data analysis (to achieve short term movement predic-
tions, to understand people’s motivations and to come
up with microscopic traffic values), we proposed a
solution for the next step, namely, the combination
of the recorded values with a microsimulation. The
routing algorithm in the microsimulation will then use
the recorded information to adjust the pathways of
the simulated pedestrians. An accurate reproduction
of pedestrian route choice patterns in complex facili-
ties is expected. As Bluetooth-scanners work seam-
lessly indoors and outdoors, further research needs
to focus on outdoor models and the integration with
existing mobility models. We conclude that use of
Bluetooth-scanners for event monitoring is not just
feasible for pattern extraction but by utilizing our
novel approach also for understanding microscopic
movement behaviour and to expose people’s motiva-
tion.
ACKNOWLEDGEMENTS
This work has been performed within the program
Research for Civil Security in the field ”Protecting
and Saving Human Life” funded by the German Gov-
ernment, Federal Ministry of Education and Research
(BMBF). The project is supported under the grant no.
13N9952 and 13N9960. Additionally, the work was
partly supported by the European Emergency Sup-
port System project grant no. 217951. We thank our
project partner CEREN and the local stadium admin-
istration for their support during the data collection.
REFERENCES
Blue, V. J. and Adler, J. L. (2001). Cellular automata
microsimulation for modeling bidirectional pedestrian
walkways. Transportation Research Part B, 35:293–
312.
Bruno, R. and Delmastro, F. (2003). Design and analysis
of a bluetooth-based indoor localization system. In
In Personal Wireless Communications, IFIP-TC6 8th
International Conference, PWC 2003, pages 711–725.
Chraibi, M., Kemloh, U., Seyfried, A., and Schadschneider,
A. (2011). Force-based models of pedestrian dynam-
ics. Networks and Heterogeneous Media, 6(3):425–
442.
de Berg, M., Cheong, O., van Kreveld, M., and Overmars,
M. (2008). Computational Geometry: Algorithms and
Applications. Springer, 3rd edition.
Fuller, R. (2009). Mobile Entity Localization and Track-
ing in GPS-less Enviroments. In: Tutorial on Location
Determination by RF Means. Springer-Verlag Berlin
Heidelberg, Berlin Heidelberg.
Galea, E. R., Gwynne, S., Lawrence, P., Filippidis, L.,
Blackspields, D., and Cooney, D. (2004). buildingEX-
ODUS V 4.0 - User Guide and Technical Manual.
www.fseg.gre.ac.uk.
Giannotti, F. and Pedreschi, D., editors (2008). Mobility,
Data Mining and Privacy - Geographic Knowledge
Discovery. Springer.
Guo, R.-Y. and Huang, H.-J. (2011). Route choice in pedes-
trian evacuation: formulated using a potential field.
Journal of Statistical Mechanics: Theory and Experi-
ment, 2011(04):P04018.
Hagemann, W. and Weinzerl, J. (2008). Automatische Er-
fassung von Umsteigern per Bluetooth-Technologie.
In: Nahverkerspraxis. Springer-Verlag Berlin Heidel-
berg, Berlin Heidelberg.
Hallberg, J., Nilsson, M., and Synnes, K. (2003). Position-
ing with bluetooth. In Telecommunications, 2003. ICT
2003. 10th International Conference on, volume 2,
pages 954–958.
Hartmann, D. (2010). Adaptive pedestrian dynamics based
on geodesics. New Journal of Physics, 12:043032.
Helbing, D. and Moln
´
ar, P. (1995). Social force model for
pedestrian dynamics. Phys. Rev. E, 51:4282–4286.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
274

Helivaara, S., Kuusinen, J.-M., Rinne, T., Korhonen, T., and
Ehtamo, H. (2011). Pedestrian behavior and exit se-
lection in evacuation of a corridor an experimental
study. Safety Science.
H
¨
ocker, M., Berkhahn, V., Kneidl, A., Borrmann, A., and
Klein, W. (2010). Graph-based approaches for sim-
ulating pedestrian dynamics in building models. In
8th European Conference on Product & Process Mod-
elling (ECPPM), University College Cork, Cork, Ire-
land. http://zuse.ucc.ie/ECPPM/.
Holl, S. and Seyfried, A. (2009). Hermes - an Evacuation
Assistant for Mass Events. inSiDe, 7(1):60–61.
Hoogendoorn, S. P., Bovy, P., and Daamen, W. (2002). Mi-
croscopic Pedestrian Wayfinding and Dynamics Mod-
elling. In Schreckenberg, M. and Sharma, S., ed-
itors, Pedestrian and Evacuation Dynamics, pages
123–155.
Kemloh Wagoum, A. U. and Seyfried, A. (2011). Modelling
dynamic route choice of pedestrians to assess the crit-
icality of building evacuation. arXiv:1103.4080.
Kirchner, A. and Schadschneider, A. (2002). Simulation of
evacuation processes using a bionics-inspired cellular
automaton model for pedestrian dynamics. Physica A,
312:260–276.
Kirik, E. S., Yurgel’yan, T. B., and Krouglov, D. V. (2009).
The Shortest Time and/or the Shortest Path Strategies
in a CA FF Pedestrian Dynamics Model. Journal of
Siberian Federal University. Mathematics & Physics,
2(3):271–278.
Korhonen, T., Hostikka, S., Heli
¨
ovaara, S., and Ehtamo, H.
(2008). FDS+Evac: An Agent Based Fire Evacuation
Model. Proceedings of the 4th International Confer-
ence on Pedestrian and Evacuation Dynamics.
Kretz, T. (2009). Pedestrian traffic: on the quickest path.
Journal of Statistical Mechanics: Theory and Experi-
ment, P03012.
Leitinger, S., Gr
¨
ochenig, S., Pavelka, S., and Wim-
mer, M. (2010). Erfassung von Personenstrmen mit
der Bluetooth-Tracking-Technologie. In: Angewandte
Geoinformatik 2010. Addison Wesley Longman Inc.,
New York, 15 edition.
Lo, S., Huang, H., Wang, P., and Yuen, K. (2006). A game
theory based exit selection model for evacuation. Fire
Safety Journal, 41(5):364–369.
Moln
´
ar, P. (1995). Modellierung und Simulation der Dy-
namik von Fußg
¨
angerstr
¨
omen. Dissertation, Univer-
sit
¨
at Stuttgart.
National Institute of Standards and Technology (2002). Se-
cure Hash Standard. National Institute of Standards
and Technology, Washington. Federal Information
Processing Standard 180-2.
Pels, M., Barhorst, J., Michels, M., Hobo, R., and Barendse,
J. (2005). Tracking people using Bluetooth. Implica-
tions of enabling Bluetooth discoverable mode. Tech-
nical report, University of Amsterdam.
Raney, B. and Nagel, K. (2006). An improved framework
for large-scale multi-agent simulations of travel be-
havior. Towards better performing European Trans-
portation Systems, pages 305–347.
Schadschneider, A., Klingsch, W., Kluepfel, H., Kretz, T.,
Rogsch, C., and Seyfried, A. (2009). Encyclopedia
of Complexity and System Science, volume 5, chapter
Evacuation Dynamics: Empirical Results, Modeling
and Applications, pages 3142–3176. Springer, Berlin,
Heidelberg.
Seyfried, A., Chraibi, M., Kemloh, U., Mehlich, J., and
Schadschneider, A. (2010). Runtime Optimization
of Force Based Models within the Hermes Project.
In Pedestrian and Evacuation Dynamics 2010, pages
363–373. Springer, 2011.
Stange, H., Liebig, T., Hecker, D., Andrienko, G., and An-
drienko, N. (2011). Analytical workflow of mon-
itoring human mobility in big event settings using
bluetooth. In Proceedings of the 3rd International
Workshop on Indoor Spatial Awareness, pages 51–58.
ACM.
Thompson, P. A. (1994). Developing new techniques for
modelling crowd movement. Phd thesis, University of
Edinburgh.
Woodings, R., Joos, D., Clifton, T., and Knutson, C. D.
(2001). Rapid heterogeneous connection establish-
ment: Accelerating bluetooth inquiry using irda.
Yu, W. J., Chen, R. Dong, L., and Dai, S. (2005). Centrifu-
gal force model for pedestrian dynamics. Phys. Rev.
E, 72(2):026112.
MODELLING MICROSCOPIC PEDESTRIAN MOBILITY USING BLUETOOTH
275
