
PATHOLOGICAL VOICE DETECTION
USING TURBULENT SPEECH SEGMENTS
Fernando Perdigão
1,2
, Cláudio Neves
1
and Luís Sá
1,2
1
Instituto de Telecomunicações – Pole of Coimbra, Coimbra, Portugal
2
Department of Electrical and Computer Engineering, University of Coimbra, Coimbra, Portugal
Keywords: Continuous Speech, Unvoiced Speech, Acoustic signal Discrimination.
Abstract: Identification of voice pathologies using only the voice signal has a great advantage over the conventional
methods, such as laryngoscopy, since they enable a non-invasive diagnosis. The first studies in this area
were based on the analysis of sustained vowel sounds. More recently, there are studies that extend the
analysis to continuous speech, achieving similar or better results. All these studies use of a pitch detector
algorithm to select only the voiced parts of the acoustic signal. However, the existence of a pathology
affecting the speaker’s vocal folds produces a more irregular vibration pattern and, consequently, a
degradation of the voice quality with less voiced segments. Thus, by selecting only clear voiced segments
for the classifier, useful pathological information may be disregarded. In this study we propose a new
approach that enables the classification of voice pathology by also analyzing the unvoiced information of
continuous speech. The signal frames are divided in turbulent/non-turbulent, instead of voice/non-voiced.
The results show that useful information is indeed present in turbulent or near unvoiced segments. A
comparison with systems that use the entire signal or only the non-turbulent frames shows that the unvoiced
or highly turbulent speech segments contain useful pathological information.
1 INTRODUCTION
A significant part of the worldwide population
depends on their voice as a work tool. Teachers,
reporters, lawyers, phone assistants and professional
singers are just some examples. Especially to this
restricted group, voice problems have a considerably
negative impact, interfering with their professional
careers and their quality of life. To avoid such
problems, they require frequent medical care by an
otolaryngologist or other voice healthcare
professional. The combination of knowledge in the
area of signal processing and speech recognition has
enabled the design of algorithms and systems capable
of classifying and identifying speech pathologies for
diagnostic purposes. These systems have a great
advantage over the conventional methods, such as
laryngoscopy, since they are non-invasive.
The first studies in this area were based on the
analysis of sustained vowels. The advantages of the
analysis of this type of signal are: (i) they have a
long duration; (ii) they do not include dynamic
aspects of continuous speech, such as onset and
offset effects, coarticulation, intonation, non-
linguistic events (aspiration and respiration), etc.;
(iii) various acoustic measures have been shown to
produce good normal/pathological discrimination
results, when applied to these signals.
Among the acoustic measures, the most widely
used are jitter (changes in pitch period with time)
and shimmer (changes in amplitude with time)
(Deliyski, 1993), harmonic-to-noise ratio (HNR)
(Krom, 1993), cepstral peak prominence (CPP)
(Hillenbrand, 1996), glottal to noise excitation ratio
(GNE) (Michaelis, 1997), normalized noise energy
(NNE) (Kasuya, 1986), soft phonation index (SPI)
(Deliyski, 1993), and voice turbulence index (VTI)
(Mitev, 2000). Over the years, several systems
combining various acoustic measures and different
classifiers have been designed. More recently, those
systems have reached classification accuracy rates of
90% or above. At the same time, the
normal/pathological discrimination according to the
analysis of continuous speech has gained more
attention. In (Klingholtz, 1990) the author defended
that the long duration observed in sustained vowels
was more characteristic of singing than speech.
Another justification, accepted by various authors,
238
Perdigão F., Neves C. and Sá L..
PATHOLOGICAL VOICE DETECTION USING TURBULENT SPEECH SEGMENTS.
DOI: 10.5220/0003775902380243
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2012), pages 238-243
ISBN: 978-989-8425-89-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

was that sustained vowels do not include dynamic
aspects of continuous speech which could contain
important information that influences the perceptual
judgments of voice quality (de Krom, 1995). The
fact that human beings communicate using
continuous speech instead of sustained vowels, was
another point of view addressed by (Klingholtz,
1990). These arguments opened a new area of
investigation, resulting in an increase of the number
of studies published relating to the discrimination of
acoustic signals through the analysis of continuous
speech. All the reported works have one
characteristic in common – the selection of only
voiced segments for the classifiers. This is justified
by the fact that the conventional acoustic measures
rely on the analysis of sustained vowels and,
consequently, are meaningful only for voiced
speech. However, continuous speech is a mixture of
voiced, unvoiced and regions of silence. This
implies that a similar analysis performed on
continuous speech involves the selection of voiced
parts of speech and, consequently, the elimination of
unvoiced and silent regions.
For normal speakers, this kind of voice detection
algorithms performs well in selecting voiced frames.
However, for speakers with a voice pathology that
affects the normal functioning of the glottis, the
algorithms tend to disregard weak voiced segments.
In fact, in many voice pathologies there is an
increase of the exhaling force, which, consequently,
increases the existence of turbulent noise in the
speakers’ speech. This, allied to a more irregular
vibration pattern, makes the quality of vowels not
quite as good as the ones in normal speakers. Thus,
by selecting only the clearly voiced speech
segments, important pathological information that
may appear in weak voiced parts is disregarded. To
our knowledge, no one has ever tried to discriminate
normal from pathological speech signals using
continuous speech and, at the same time, using
unvoiced segments. In an attempt to fill this gap, the
aim of the present study is to provide a new point of
view concerning the discrimination of acoustic
signals using voiced and unvoiced parts. To obtain
these unvoiced regions a segmentation algorithm
based on an acoustic measure called turbulent noise
index (TNI) (Mitev, 2000) is proposed. The
classifier is a multilayer perceptron neural network,
which uses temporal delays in its inputs.
Almost all the acoustic signals used in the studies
referred to in this paper were selected from the
Disordered Voice Database (DVD, 1994), which is
also the one used in this work (described in Section
2). The rest of this paper is structured as follows. In
Section 3 a brief description of the methodology used,
namely, the selection of the turbulent and non-
turbulent speech segments and the training process of
the classifiers is provided. In Section 4 the
performance results are presented and discussed in
light of the task described. Finally, in Section 5 the
main conclusions of this paper are drawn.
2 MATERIALS
The corpus was selected from the Disordered Voice
Database recorded at the Massachusetts Eye and Ear
Infirmary (MEEI) Voice and Speech Lab and also at
Kay Elemetrics Corp. (DVD, 1994) (referred to as
KayPentax database from now on). This database
contains recordings of about 660 patients with a
wide variety of voice disorders, referred to as
pathological speakers, as well as 53 speakers
without any voice pathologies, referred to as normal
speakers. It includes, for almost all the speakers, one
sustained phonation of the vowel /a/ and one reading
of the text “The Rainbow Passage”. Also included in
the database is the diagnostic information along with
the patient identification (age, sex, smoking status
and more). All the speech samples were collected in
a controlled environment with 16 bit sample
resolution and sampling rates of 10 kHz, 25 kHz or
50 kHz. This database has been widely used by
researchers.
From this database 650 signals were selected and
divided into training (70%) and test (30%) datasets.
This division was done randomly and the process
was repeated three more times in order to perform a
4-fold cross-validation statistical analysis. Table 1
shows the distribution of normal and pathological
files in the training and test datasets.
Table 1: Composition of the training and test datasets.
Pathological Normal
Train (no. of signals
/ total time)
430 / 1:26:00
25 / 0:05:00
Test (no. of signals /
total time)
184 / 0:36:48 11 / 0:02:12
3 METHODS
Here, a brief description of the pre-processing
applied to the speech data is given in order to obtain
the feature representation. This is followed by the
description of the two algorithms required for
retrieval of the unvoiced information: the
speech/non-speech (S/NS) detector, and the
PATHOLOGICAL VOICE DETECTION USING TURBULENT SPEECH SEGMENTS
239
voiced/unvoiced (V/UV) detector. Finally, the last
section describes a classifier based on a multilayer
perceptron network.
3.1 Short-time Analysis
The short-time analysis consists on dividing the
input signal into a sequence of frames by applying a
40ms Hamming window at a frame rate of 100
frames/s. The Discrete Fourier Transform (DFT) is
then applied with a number of points equal to the
lowest power of two bigger than the window length.
Finally, 26 features are computed for each frame: 12
cepstral coefficients, plus the logarithm of the frame
energy, plus the first derivatives of the previous 13
coefficients (26 coefficients in total). This task is
accomplished using a filter with 20 channels in the
Mel frequency domain. A mean normalization on
the first 12 coefficients, over the entire sentence,
was also performed with the purpose of reducing the
variability related to the microphone used or other
spectral information that is invariant in time. This
kind of coefficients are called mel-frequency
cepstral coefficients (MFCCs) and are a widely used
in speech recognition as well as in studies that apply
signal processing for medical purposes. There are
also various acoustic parameters that use the
information of specific frequency bands to extract
pathological information from acoustic signals, such
as SPI and VTI (Deliyski, 1993). Therefore, the
MFCCs seemed to be the appropriate choice to use
as the input features of a neural network.
3.2 Speech/ Non-speech Segmentation
It is obvious that the non-speech segments do not
contain any useful information that can be extracted
to discriminate normal from pathological voices, and
hence they should be removed. This is done with an
algorithm that classifies each frame into speech or
non-speech. In the present case the non-speech
events correspond to silence or small energy
segments in each sentence. Therefore, the frames are
classified as speech or non-speech (silence) in
accordance with their own logarithmic energy (the
13th coefficient of the features vector) and a
decision threshold.
3.3 Turbulence Segmentation
After having selected only the speech frames, it is
necessary to classify them into turbulent or non-
turbulent. To provide this classification we used an
algorithm based on a different implementation of the
turbulent noise index (TNI) reported in (Mitev,
2000). In the scope of this work, the aim of the TNI
parameter was to segment the frames according to
the degree of turbulence, not exactly into voiced and
unvoiced. However, these two approaches are
almost equivalent.
Firstly, we evaluate the cross-correlation factor
of an N samples frame, x[n] = x
a
[n], with the next
neighbour samples, x[n+N] = x
b
[n], using the
following expression, where N corresponds to 20ms,
[]
[]
1
0
11
22
00
[] | |
[]
[] | |
Nk
ab
n
x
NN
ab
nn
xnxn k
N
k
Nk
x
nxnk
ρ
−−
=
−−
==
⋅+
=
−
⋅+
∑
∑∑
(1)
for
1,..., 1kN N=− + − . Then the maximum peak
value of this correlation factor is chosen over the
computed indexes,
[
]
{
}
max
xx
k
k
ρρ
∗
=
. (2)
Finally, a value of turbulence is computed for every
frame according to
∗
−=
x
TNI
ρ
1
.
This measure is also very similar to a harmonic-
to-noise ratio in a linear scale (Boersma, 1993). In
fact, for a perfectly periodic signal with period less
than N samples,
ρ
x
[k] will have a maximum peak of
one. For a pure noise signal
ρ
x
[k] will peak to a
small value, and for a periodic signal embedded in
noise with 0 dB SNR (signal power equal to noise
power)
ρ
x
[k] tend to peak at 0.5. In case of speech
signals, the peaks of
ρ
x
[k] tend to be greater than 0.5
for voiced segments and lesser for unvoiced ones. In
our case N corresponds to 20 ms and then any
periodic segments above 50 Hz manifests in peaks in
the cross-correlation function. So, this procedure
avoids the pitch determination and the detection of
voiced and unvoiced segments. A maximum peak of
the correlation factor is an indication of periodicity
and a lower peak is an indication of high noise. The
given name (TNI) comes from the similarity of this
measure with the one proposed in (Mitev, 2000).
For fricative sounds or even for vowels (in the
case of glottal excitation with pronounced
turbulence – breathy phonation), TNI tends to be
high. On the other hand, it tends to be low for voiced
segments with low turbulent noise, as in normal
phonation. Fricative sounds are not an indicator of
vocal fold pathology; however, as pathological
speakers tend to increase the exhaling force in
phonation, the intensity ratio of fricative sounds to
non-fricative ones may also be important to
pathological detection.
There are three main differences between this
implementation and the original turbulence
BIOSIGNALS 2012 - International Conference on Bio-inspired Systems and Signal Processing
240
formulation. Firstly, a value of TNI was
computed for all frames, independently of the frame
type, whereas in (Mitev, 2000) they only obtain TNI
values for voiced frames. The second difference is
directly related to the first one. As TNI value was
obtained for all frames, not all of them contained
periodic signals as glottal cycles. This means that the
cross-correlation between two different frames (one
voiced and another unvoiced or vice versa) or
between two unvoiced frames should result in a low
value and, consequently, a high TNI value.
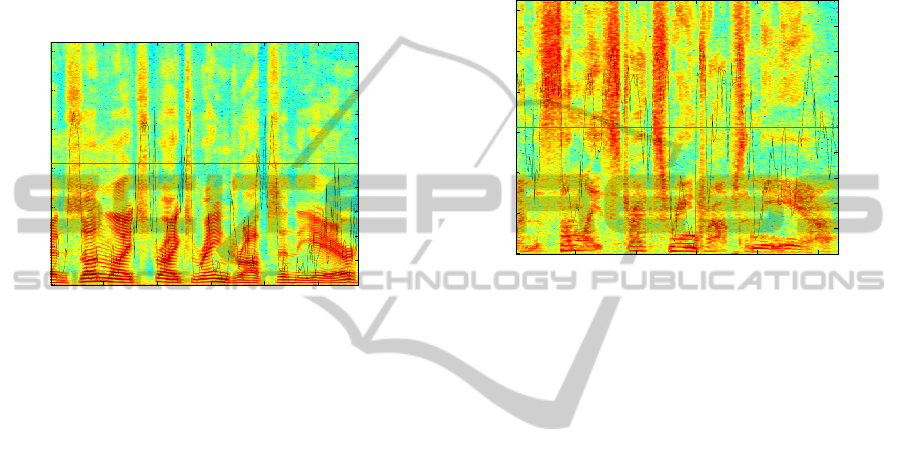
Figure 1: Overlap of the TNI signal on the power spectral
density for the speech signal “RHG1NRL.NSP” (non-
pathological speaker). The horizontal line represents the
threshold used in the turbulence-based decision.
Finally, as high TNI values (in vowels) can be an
indicator of vocal fold pathology, selecting these
frames to detect pathological voices seems to be
more important than using only low TNI ones. This
can be done by specifying a fixed threshold on TNI,
as shown in Figure 1 and Figure 2. All frames with a
TNI value above 0.5 (this value was experimentally
adjusted) are classified as turbulent frames and all
the others are discarded (or taken to another
classifier which uses low turbulent frames).
Figure 1 and Figure 2 contain spectral and TNI
information corresponding to the same excerpts of
the text “The Rainbow Passage” – “When the
sunlight strikes raindrops in the air…”. Although
Figure 1 presents part of an acoustic signal from a
non-pathological male speaker (DVD, 1994), Figure
2 shows the correspondent part of an acoustic signal
from a pathological female speaker. As can be seen,
the fricative sounds (such as /s/), which are
characterized by high energy at higher frequencies,
have low cross-correlation values and,
correspondingly, high TNI values. The voiced
frames, characterized by visible spectral strips, have
higher cross-correlation values, which correspond to
lower TNI values. When comparing the two graphs
it is possible to verify that the fricative sounds in
Figure 2 are considerably more stressed than the
corresponding ones in Figure 1. It is also visible that
some of the voiced parts in Figure 1, characterized
by well-defined formants, are not so well
represented in Figure 2. As an example, in Figure 1
almost all the frames between the 57th and 65th
were classified as non-turbulent (TNI values below
0.5), while in Figure 2, the same frames were
considered as turbulent (TNI values above 0.5).
Figure 2: Overlap of the TNI signal on the power spectral
density for the speech signal “LXC06R.NSP”
(pathological speaker). The horizontal line represents the
threshold used in the turbulence-based decision.
3.4 Classifiers
Since the class information corresponding to each
signal file is available, a supervised learning
classifier, such as a multilayer perceptron (MLP)
neural network, is suitable system. Three MLPs
were trained with the training datasets: one with all
the information (non-turbulent and turbulent
frames); another one with only non-turbulent
information; and the last one using solely turbulent
information. Each MLP was composed of three
layers. Each input consisted of (2N
f
+ 1) × N
p
values,
where N
f
is the number of context frames (for each
frame we considered the influence of the N
f
preceding frames and the influence of the N
f
subsequent frames) and N
p
is the number of
coefficients included in each feature vector (26
coefficients). In the hidden layer 100 hidden neurons
were used. In addition, and due to the reduced
number of frames of the MLP trained with turbulent
information, tests using MLPs with only 25 hidden
neurons were also made. In all cases, each MLP
provided one output. The transfer function for all
units is the sigmoid. The MLPs were initialized
randomly and the training was performed using the
resilient backpropagation algorithm (RPROP).
During training, the weights and biases of the network
N
umber of frames
Frequency
50 100 150 200 250
0
2000
4000
6000
8000
10000
12000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
TNI
N
umber of frames
Frequency
50 100 150 200 250
0
2000
4000
6000
8000
10000
12000
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
TNI
PATHOLOGICAL VOICE DETECTION USING TURBULENT SPEECH SEGMENTS
241
were iteratively adjusted according to the default
performance function – mean square error (MSE).
4 RESULTS AND DISCUSSION
The objective of this work is to distinguish between
normal and pathological voices, so two classes must
be used. In our case “0” represents the “normal”
class and “1” represents the “pathological” class.
Since there are only two possible decisions, a
statistical hypothesis test can be used. In this
context, the hypothesis H
0
, or null hypothesis,
indicates that an acoustic sample is pathological and
the hypothesis H
1
, also referred to as the alternative
hypothesis, means that it is normal. Accepting H
0
is
equivalent to rejecting H
1
and vice versa. When
classifying a sample s, four situations can occur: i)
we make a correct acceptance (CA); ii) we reject the
true hypothesis, which is called wrong rejection
(WR); iii) we make a correct rejection (CR); and iv)
we accept a false hypothesis, which is called wrong
acceptance (WA) also known as false alarm (FA).
The objective of a neural network classifier is to
learn how to characterize each output according to
the information available on the input. In this case,
this means that the classifier should be able to
capture the essence of the “normal” and
“pathological” classes and produce a corresponding
output. Varying the threshold value
τ
, from its
minimum up to its maximum, corresponds to
varying the realizations of the four hypotheses (CA,
WR, CR and WA) and therefore their probabilities:
P(CA|
τ
), P(FR|
τ
), P(CR|
τ
) and P(FA|
τ
). The
realizations of these quantities are achieved as
follows. Given an acoustic signal, the classifier
returns an output for each one of its frames. The
arithmetic mean of the logit values (log(p(1-p)) of
those frames represents a single value, usually called
a score, that characterizes the acoustic signal and
which can be directly compared to the threshold. If
the score is greater than the threshold, then the
acoustic signal is classified as “pathological”.
The optimum threshold value, often referred to
as optimum operation point (OOP), is found
somewhere near where both curves of the histogram
intersect. Another way to find the OOP is to use a
receiver operating characteristic (ROC) curve or a
detection error trade-off (DET) curve (Martin, et al.,
1997). The most widely used OOP consists in
finding the point where WR equals WA and is called
the equal error rate (EER) point. Another way to
define a OOP is to find the point which minimizes
the distance to the origin of the axes in the DET
curve – using the Euclidean distance. All OOPs were
defined in this work using the criterion based on the
Euclidean distance. The results obtained for all
classifiers and for the 4-fold datasets are shown in
Table 2. The figures given represent the sum of all
values (CA, CR, WA, WR) of the four test datasets
specified. The percentage value in the table is
Accuracy which is defined as 100 × (CA+CR)/
(CA+CR+WA+WR).
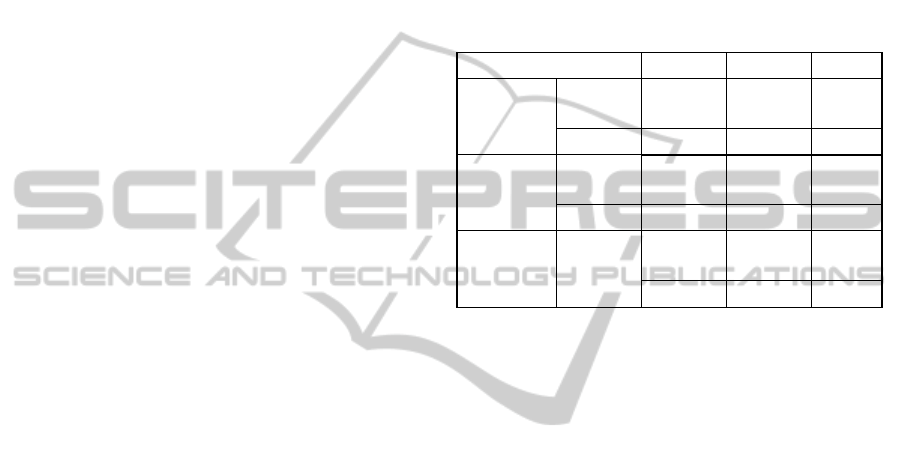
Table 2: Classifiers’ performance in terms of CA, CR, FA,
FR and accuracy.
Predicted Predicted Tota
l
All Frames
Pathol. 734 2 736
Normal 2 42 44
Tota
l
736 44
99.5%
Non-
turbulent
Frames
Pathol. 733 3 736
Normal 3 41 44
Tota
l
736 44
99.2%
Turbulent
Frames
Pathol. 736 0 736
Normal 0 44 44
Tota
l
736 44
100%
4.1 Discussion
As shown in Table 2, the worst results were obtained
for the classifier with non-turbulent frames as inputs.
Even in this case, an accuracy of 99.2 ± 0.8% was
achieved, which is 3% better than the results
obtained with the voiced frames based classifier
proposed in (Godino-Llorente, et al.,2009). This
difference can be explained by the context included
in the inputs of the MLPs. Instead of considering
each input as an isolated frame, we use a set of 11
frames each time (5 before, 5 after and the actual
frame). So, the neural network classifiers have more
data to learn from. Another point that can justify the
results obtained is the relation between the selection
of frames and the computation of the first
derivatives of the MFCCs. Since we only select the
frames for the different classifiers after the
computation of the deltas, each frame includes the
influence of its adjacent frames, independently of
the frame type. This means, for example, that the
deltas of a turbulent frame may have been calculated
with the MFCCs of adjacent non-turbulent frames.
More impressive are the results obtained with the
turbulent frame classifier. In all the 4 tests made
with this classifier, a 100% correct classification was
obtained. These results are better than the ones
obtained for the other two classifiers (which are
similar: 99.5 ± 0.9%, for the classifier with all
frames and 99.2 + 0.8%, for the classifier with non-
BIOSIGNALS 2012 - International Conference on Bio-inspired Systems and Signal Processing
242

turbulent frames). Since the algorithm for choosing
frames is based on a TNI implementation and not on
pitch, the frames selected as turbulent contain
important information about the “normality” or the
“pathology” of the speaker. While in the “normal”
cases these frames correspond mostly to fricative
sounds and other unvoiced consonants, in the case of
the pathological speakers the frames also include
vowels with low quality or even whispered (which
does not happen in the case of the classifier with
non-turbulent frames). The classifier with turbulent
frames thus has more relevant data to characterize
and distinguish between both classes and for this
reason it can perform better than the others.
Some tests were also performed in order to
evaluate the influence of the number of context
frames and the number of hidden neurons on the
classifiers’ performance. As expected, the results
proved that the classifiers’ performance decreased as
the number of context frames decreased and/or the
number of hidden neurons also decreased. In
addition to the tests described, some others using
similar MLPs neural networks but with two outputs
instead of one were also performed. The results
obtained were the same as the ones stated before,
which confirms the choice to train classifiers with
only one output.
The results presented this section demonstrate
that the combination of continuous speech along
with turbulent information produces excellent
normal/pathological discrimination results when
using the KayPentax database. However, it does not
imply that the three classifiers succeeded in
obtaining the fundamental cues for “normality” and
“pathology”, independently of the database or the
text. In the literature so far produced it is not
common to see this sort of analysis, which can show
the true meaning of the results obtained.
5 CONCLUSIONS
In this work an algorithm to discriminate normal
from pathological speakers based on the analysis of
turbulent information of continuous speech is
presented. All previous works on this subject assume
that the unvoiced parts of the acoustic signals have
no useful information, which justifies the selection
of only voiced speech segments for their
classification systems. In our opinion, these studies
are in fact disregarding important pathological
information that may appear in unvoiced or almost
unvoiced segments, due to a lower quality of the
vowels produced by speakers with pathologies. To
select the less voiced and unvoiced regions of the
signal we propose a segmentation algorithm based
on an acoustic measure called turbulent noise index,
TNI. By properly adjusting a threshold it is possible
to use the TNI measure to select, among others,
meaningful frames containing vowels with low
quality or even whispered speech. Thus, relevant
pathological information is given to the classifier.
The tests performed in a well-known database
resulted in very good discrimination of the
pathological voices. This result must be emphasized
as it shows that it is possible to correctly classify
normal and pathological speakers according to
turbulent information only.
REFERENCES
Deliyski, D., 1993. Acoustic model and evaluation of
pathological voice production, in: 3rd Conference on
Speech Communication and Technology.
Krom, G., 1993. A cepstrum-based technique for
determining a harmonics-to-noise ratio in speech
signals, J. Speech Hear. Res. 36 (1993) 254-266.
Hillenbrand, J., Houde, R-, 1996. Acoustic correlates of
breathy vocal quality: dysphonic voices and
continuous speech, J. Speech Hear. Res. 39.
Michaelis, D., Gramss, T., 1997. H.W. Strube, Glottal-to-
noise excitation ratio – a new measure for describing
pathological voices, Acta Acustica 83 (1997) 700-706.
Kasuya, H., Ogawa, S., Mashima, K., Ebihara, S, 1986..
Normalized noise energy as an acoustic measure to
evaluate pathologic voice, J. Acoust. Soc. Am. 80 (5)
(1986) 1329-1334.
Klingholtz, F., 1990. Acoustic recognition of voice
disorders: a comparative study of running speech
versus sustained vowels, J. Acoust. Soc. Am. 87.
de Krom, G., 1995. Some spectral correlates of pathological
breathy and rough voice quality for different types of
vowel fragments. J. Speech Hear. Res. 38.
Godino-Llorente, J., Fraile, R., Sáenz-Lechón, N., Osma-
Ruiz, V., Gómez-Vilda, P., 2009. Automatic detection
of voice impairments from text-dependent running
speech, J. Biomed. Signal Process. Control 4.
Mitev, P. ,Hadjitodorov, S., 2000. A method for turbulent
noise estimation in voiced signals, J. Med. Biol. Eng.
Comput., 38, 625-631.
DVD 1994. Massachusetts Eye and Ear Infirmary Voice
and Speech Lab, Disordered Voice Database version
1.03, Kay Elemetrics Corp., Pine Brook, NJ.
Boersma, P., 1993. Accurate short-term analysis of the
fundamental frequency and the harmonics-to-noise
ratio of a sampled sound, Proceedings of the Institute
of Phonetic Sciences 17, 97-110.
Martin, A. et al., 1997. The DET curve in assessment of
detection task performance, in: 5th European
Conference on Speech Communication and
technology – EuroSpeech 1997, 1895-1898.
PATHOLOGICAL VOICE DETECTION USING TURBULENT SPEECH SEGMENTS
243
