
LANDMARK EXTRACTION FROM LEAVES WITH PALMATE
VENATION
Application to Grape
Raffi Enficiaud and Sofi
`
ene Mouine
INRIA Paris-Rocquencourt - IMEDIA, Domaine de Voluceau - Rocquencourt - B.P. 105, 78153 Le Chesnay, France
Keywords:
Plant identification, Venation extraction, Mathematical morphology, Computational botany.
Abstract:
The growing interest of Content Base Image Retrieval techniques in the context of plant identification requires
the development of appropriate features. A considerable amount of information about the taxonomic identity
of a plant is contained in its leaves, and most of the botanical expertise uses jointly the contour and the
venation network. The current work focuses principally on the extraction of the venation network, the base
and secondary landmarks of leaves with uncluttered background, assuming only their structure as palmate.
Morphological operators are used to extract a first approximation of the venation network, which is then
filtered by a voting scheme and reconstructed using a connected component like algorithm. The base point
and the primary veins are then extracted with an accuracy of 100%, which allows identification of the lobes
and the measurement their relative length.
1 INTRODUCTION
The wine industry is ruled by laws on exploitation and
trade. Identifying the exact type of vine is a critical is-
sue for people involved in its exploitation. A wide va-
riety of actors is concerned by vine identification, but
only a few of them has knowledge in botany. This is in
contrast with the difficulty of the task, since the iden-
tification is almost solely achievable by experts in this
specific field. The difficulty of the identification ex-
plains the growing interest in automated procedures,
such as Content Based Image Retrieval (CBIR) tech-
niques, which application in this field is relatively new
and has shown to provide promising performances.
Aside from any technical feasibility issue, CBIR en-
dows non-expert users with fast retrieval, similarity
and browsing methods, which potentially could solve
the task of identification without the need for exter-
nal expertise. A considerable amount of information
about the taxonomic identity of a plant is contained in
its leaves. In addition to their discriminative power,
leaves are parts of plants that are observable at al-
most any stage of maturity. CBIR was successful
in classifying Orchid species (Coutaud et al., 2009)
from scan of their leaves and using common colour
and texture descriptors. In this paper, we present a
method for extracting meaningful landmarks from the
leaves, only under the assumption of a palmate struc-
ture, a family to which the grapes belong. These
landmarks are chosen to be as close as possible to
the existing botanical expertise, in order to develop
feature extraction techniques that remain humanly in-
terpretable. To the authors knowledge, the specific
task of grapes identification from their leaves is ad-
dressed exclusively in the botany community. Hence,
no particular reference nor ground truth are available
for evaluations. In the botany community, a lot of
work has been achieved so far and the current state of
knowledge is constantly renewed. The reader is re-
ferred to (OIV expert group “Vine selection”, 2009),
which describes the identification cues for wide va-
riety of grapes. Many of these rely on the general
appearance of the leaf (eg. the number of lobes, the
overall shape of the blade.) Others are defined directly
on the venations (eg. length and relative angles), or on
a combination of the boundary of the blade and the
venation (eg. length and width of the tooth.) The au-
thors of (Park et al., 2006) extract the venation pattern
of the leaves. Combined with the shape (Nam et al.,
2008), the venation improves the accuracy of the iden-
tification. The paper is organized as follows. Section
2 presents the general settings. Section 3 describes a
method for extracting the venation network. These re-
sults are used for reconstructing the venation network
and detecting the base point in Section 4. Section 5
concludes and provides directions for future work.
520
Enficiaud R. and Mouine S. (2012).
LANDMARK EXTRACTION FROM LEAVES WITH PALMATE VENATION - Application to Grape.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 520-524
DOI: 10.5220/0003715705200524
Copyright
c
SciTePress
2 GENERAL SETTINGS
Our database contains 20 varieties of grapes, each of
which containing 19 images. Each image contains
one leaf on an uncluttered background. The grape
leaves are all palmate, which means that several pri-
mary veins split from the petiole (leaf stalk). From
primary veins then start secondary veins at bifurca-
tion points. In the image plane, the location where the
petiole joins the blade is considered as the base point.
The leaves have very different aspects even within a
class, as they are non-rigid objects and their planarity
is not guaranteed. They also may or not have lobes
that create local occlusions. The venation seems to
be the proper element on which we can normalize the
measurements. The settings make the segmentation
of the blade straightforward: a chromatic threshold
in the GHLS (Levkowitz and Herman, 1993) colour
space provides very accurate results. Some meaning-
ful information cannot be retrieved from the contour
of the leaf alone. This is the case for instance for the
lobes, their number and their apexes. Indeed the tooth
of the blade is of the same amplitude for the apex and
its surroundings, which makes the apex of the lobe
hardly distinguishable.
3 VENATION EXTRACTION
The veins are locally linear structures that have a con-
trast with the blade. They may be either brighter or
darker than the blade, depending on the variety, and
the contrast level is not known a priori. These prop-
erties make mathematical morphology operators, es-
pecially top-hat and opening with line structuring el-
ements (SE) following (Zana and Klein, 2001) ideal
candidates for extracting these structures.
3.1 Morphological Processing
We denote S
α
`
the segment SE of length ` and orienta-
tion α. We also denote γ
S
α
`
the morphological opening
using the SE S
α
`
. Given a particular orientation α, we
want to extract the meaningful segments with direc-
tion α from the image. We first extract the elements
that cannot fit into a line of length `
1
and of direction
α
⊥
= α + π/2 with a morphological top-hat, in order
to extract the structures having a contrast along α
⊥
.
We then apply a morphological opening using S
α
`
2
to
extract the segments of direction α and of length at
least `
2
. Efficient implementation of directional filter-
ing exists (eg.(Soille and Talbot, 2001).)
The processing is performed on the luminance
channel. In our experiments, we considered 12 direc-
tions uniformly distributed on [0,π[. The sizes of the
SE play a major role in the detection of the venation.
Ideally `
1
should be of the magnitude of the thick-
ness of the leaves, and `
2
should be wide enough to
filter out small structures that cannot be associated to
segments of interest. However even with finely tuned
parameters, the retrieved veins will, in all cases, be
disconnected due to first, the curvature and bifurca-
tion points of the venation network and second, to
the angular resolution. Rather, we consider this step
as an initial filtering of the venation with a certain
amount of false detection, that we further use to re-
cover the base and the primary veins. Although the
SE are straight lines, the thickness of the veins al-
lows to consider slightly curved approximations, and
we approximate the connected components (CC) of
im
f ilt
with a 2-polynomial using a linear regression.
The 2-polynomial representation allows several com-
putations in closed form (intersection, length...) that
are easily expressed, and accommodates the curvature
of the detections.
3.2 Meaningful Veins
The number of false alarms produced by the previous
processing is often high, and we propose a method
for keeping the meaningful polynomials. As the scale
of the leaf is not a priori known, no parameter on the
size of the polynomials should be used. We denoted
by s
k
the segment indexed by k ∈ {(i,α),( j,θ)} and
s
α
i
∩ s
θ
j
the intersection points of polynomials s
α
i
and
s
θ
j
. Alg.1 favours the polynomials that are on the path
of other polynomials. Also, the longer the polynomi-
als, the higher the associated vote. The purpose is to
reduce the number of entities of interest in each direc-
tion, for instance by keeping the n highest votes in
Algorithm 1: Meaningful veins - Pseudo-code.
Data: l
α
i
input CC in each direction indexed by i
and α, n
1
,n
2
: complexity parameters, n:
number of meaningful detection per α
Result: o
α
: detected meaningful veins
1 forall the α do
2 s
α
← polynomials l
α
i
sorted by decreasing
length;
3 v
α
i
← 0;
4 forall the α, θ, θ 6= α, i ∈ N
∗
n
1
, j ∈ N
∗
n
2
do
5 forall the t ∈ s
α
i
∩ s
θ
j
, p ∈ t,
(k, k
0
) ∈ {(i, α),( j,θ)}
2
, k 6= k
0
do
6 if p ∈ s
k
then v
k
← v
k
+ 1;
7 forall the α do
8 o
α
←first n element of s
α
sorted by v
α
;
LANDMARK EXTRACTION FROM LEAVES WITH PALMATE VENATION
- Application to Grape
521

each direction
1
. Due to the angular resolution, some
directions do not have any relevant polynomials but
still are in the final set of detected segments (see Fig.1
& 3, first row.) This issue will be addressed in the next
section.
4 BASE DETECTION
Since the venation network is palmate, we can argue
that the base point is at the intersection of the primary
veins. We hence compute the intersection points for
each pair of candidate polynomials of Alg.1, and keep
the points that either lie within the range used for the
approximation of both polynomials, or are close to it.
In fact, keeping only intersection points lying within
the range of approximation filters out relevant inter-
section point, explained by the fact that the base point
is often a large area of venation, which makes the di-
rectional top-hat miss the zone. In our experiments,
we considered intersection points that are not further
away than 5% of the length of the candidate vein.
We associate to each intersection x
k
a weight w
k
that
favours angles close to π/2 at the intersection point
between the two involved polynomials.
Given the intersections, we then use the mean-
shift (MS) (Comaniciu and Meer, 2002) algorithm to
find the local maximum density locations, which we
consider as being candidates for the base of the leaf.
Using the normal density estimates, the update rule
yields
y
i+1
=
∑
k∈N
x
x
k
· w
k
· exp
y
i
−x
k
h
2
∑
k∈N
x
w
k
· exp
y
i
−x
k
h
2
(1)
where N
x
stands for an appropriate neighbourhood of
the intersection point x weighted by w. In our exper-
iments, we took the neighbourhood as being a ball of
radius 1% of the image size. The result of the MS
algorithm is a set of local modes, that we cluster to-
gether as explained in (Comaniciu and Meer, 2002),
resulting in a set of candidates C. Selecting the base
as the mode with highest density (denominator of
Equ.1) provides 99.74% of correct results. However,
in this setting, some polynomials may appear with
high similarity at different orientations, each of which
creating intersection points. Moreover, the number
of votes/intersections grows quadratically in the num-
ber of polynomials. This is why we believe that rely-
ing on the density alone will not behave correctly for
other databases and will be sensitive to noise.
1
in our experiments, we took n
1
= 10, n
2
= 5 and n = 3.
4.1 Network Reconstruction
As mentioned, the candidate venation network com-
puted in §3.2 is disconnected. Moreover, some poly-
nomials are redundant as they were detected at close
angular directions. We consider a path as a sequence
of 2-polynomials along with their boundary. The
complete algorithm proceeds in two similar steps:
first it prunes, merges and splits intersecting polyno-
mials into an initial set of paths P . It then merges
this set of paths with close and compatible orienta-
tions boundaries. The algorithm starts by sorting the
initial set of polynomials S by decreasing length. It
then proceeds in a way similar to a region growing
by hill climbing, with the difference that it may create
new polynomials during the growing, which should
then be correctly handled. A FIFO queue c is initial-
ized with the first element of S. Two other queues
p,g, used respectively for the current path, and the
pruned polynomials, and a priority queue q are also
initialized. For each popped-out element e of c, all
polynomials t in S , but not in p, c or g, and inter-
secting e within their respective boundary and with
an angle lower than π/12, are selected. Let’s call i the
intersection of t and e meeting these constraints. If the
boundaries of t are completely included in those of e,
then t is targeted for pruning and added into g. Other-
wise, e and t are split at their intersection i. From the
four parts obtained, the longest configuration is kept,
yielding left and right polynomials l
t,c
,r
t,c
. The new
polynomial l
t,c
∪ r
t,c
is inserted into q. After all can-
didates t have been tested, either q is empty, in which
case e is added to the current reconstructed path p, or
q contains new polynomials not in S. In that case, for
the t generating the longest new polynomial, e and t
are both removed from S, and l
t,c
and r
t,c
are added
both into S and c (region growing). Finally, when no
growing is possible, P = P ∪ p and S = S − p ∪ g.
For the second part of the reconstruction, instead
of considering intersecting polynomials, paths not
distant from more than 2 × R , with R the radius of
the kernel used in Equ.1 are considered. Indeed, poly-
nomials separated by at most 2 × R will get selected
by a base candidate (see next section).
4.2 Base Selection
For each of the MS candidates c ∈ C , we select
the subset Q
c
of paths from P such that Q
c
= {p ∈
P ,∃ p
i
∈ p st. d(p
i
,c) < R }, which amounts to solve
the roots of a 3-polynomial. We then consider the
base point B as being
B = arg max
c∈C
∑
p∈Q
c
length(p)
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
522
With the proposed method, the achieved accuracy in
the detection of the base is 100% for the specified
database, even for leaves with defects (see Fig.4.) We
should note that the detection of the base point is of
principal interest, since the structure of the venation
network is hierarchical and rooted on the base point.
Hence its detection should also be considered for join-
ing disconnected veins. Indeed, prematurely linking
some venation paths together irremediably degrades
the accuracy of the venation structure on the whole
database.
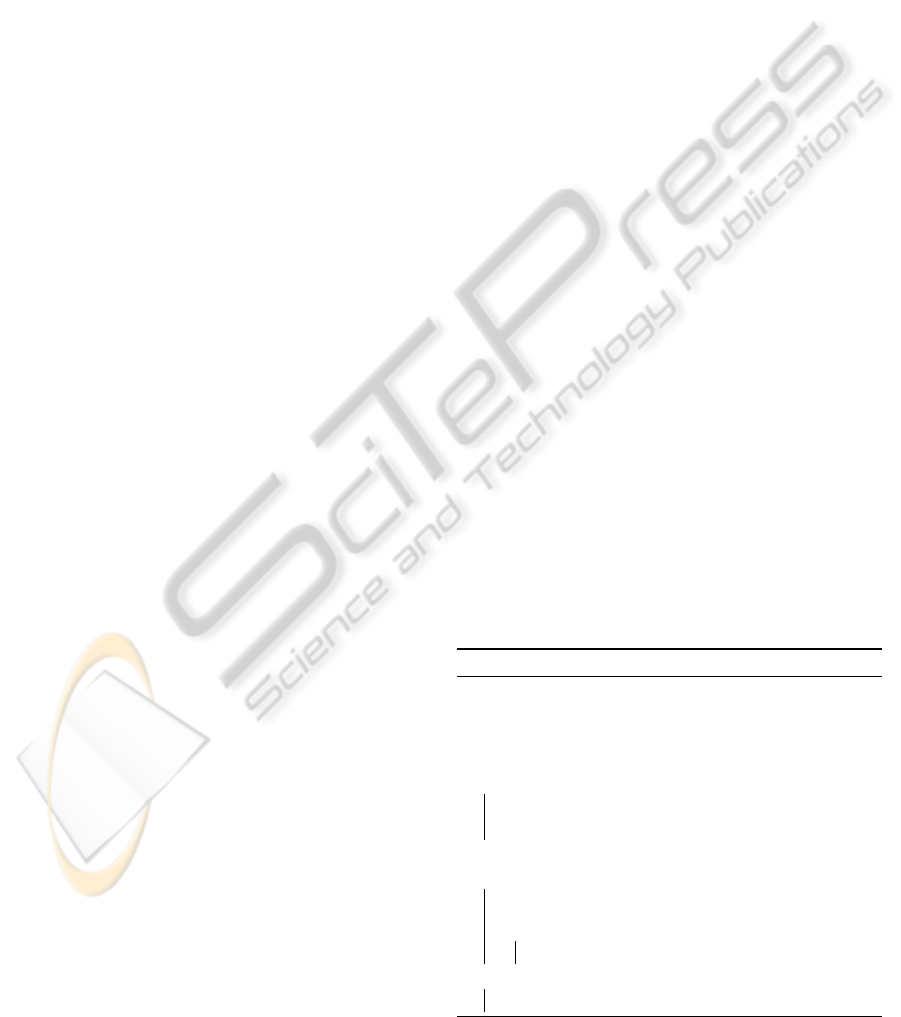
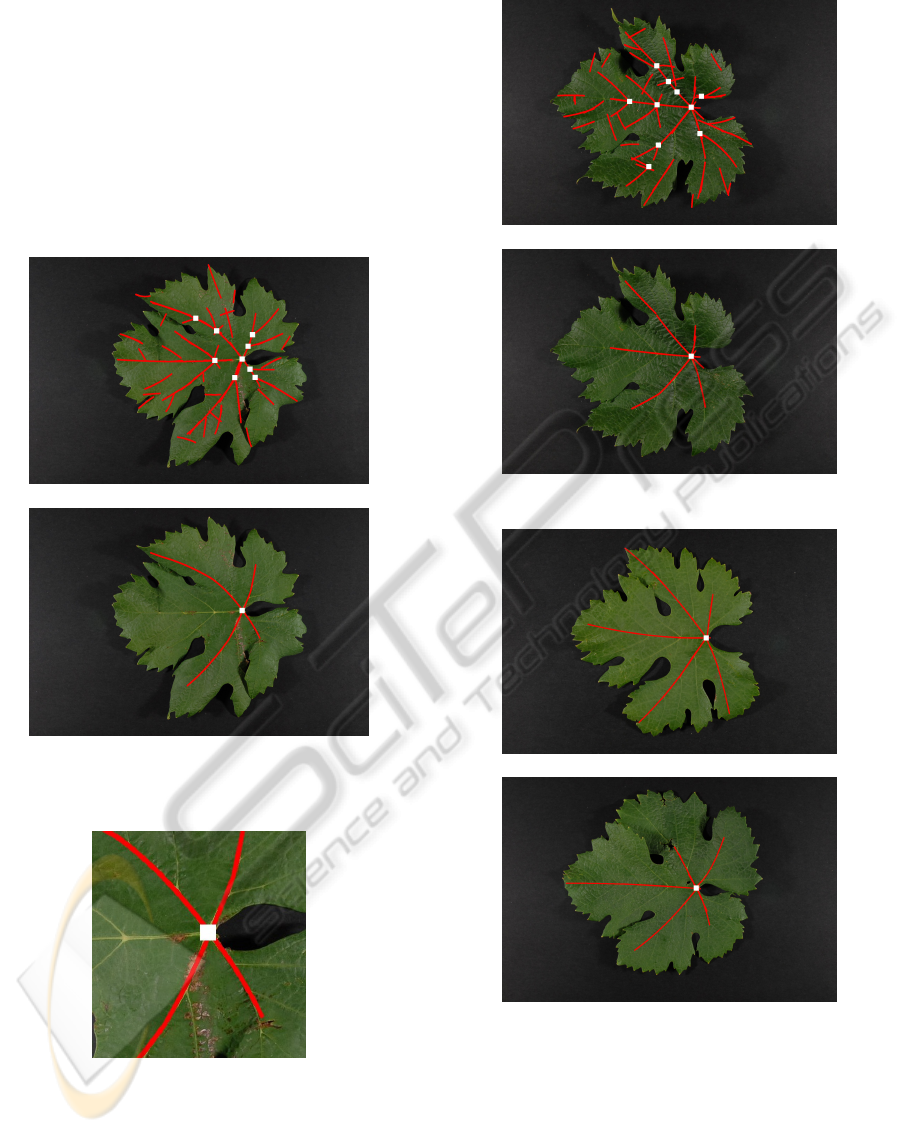
Figure 1: “Servant” variety. Top: filtered venation network
(red) and MS candidates C (white). Bottom: detection of
the base (white) and associated primary veins Q
B
(red).
Figure 2: “Servant” variety: zoom over the base area. The
damage prevents from linking the base to the horizontal
path.
4.3 Other Landmarks
From the reconstructed primary venation network P ,
the extremities of the lobes are easily extracted by
Figure 3: “Merlot” variety. See Fig.1 for legend.
Figure 4: More results from “Servant” variety. See Fig.1
(bottom) for legend.
extrapolating the path. We used a linear extrapola-
tion with direction given by the mean of the tangent
of the 2-polynomials close to their boundary. This
is explained by the fact that the 2-polynomial repre-
sentation is accurate only within the CC used for its
regression, and may strongly diverge outside the CC.
We also recall that the leaves are not assumed to be
planar. The other base candidates C \ B are lying on
LANDMARK EXTRACTION FROM LEAVES WITH PALMATE VENATION
- Application to Grape
523

bifurcation points, which enables the measurements
of relative lengths and angles of bifurcations.
5 CONCLUSIONS AND FUTURE
WORK
We have presented a set of methods for detecting par-
ticular landmarks from grape leaves, with a focus on
the reconstruction of the venation network and the
base point. Our method starts from an initial detec-
tion of segments in the image, which are then filtered
based on the number of their intersections. The ar-
eas of intersections are clustered, each cluster being
a candidate base point. The initial venation network
being disconnected, we proposed a hill-climbing like
algorithm for its reconstruction, resulting in a set of
venation paths. Finally, the base point is selected as
being the candidate from which the total length of the
closest paths is maximal.
The proposed scheme detects the base point with
an accuracy of 100% for the grape leaves database,
and is robust to scale, orientation and contrast or illu-
mination change. The main assumption being made
is related to the palmate structure of the leaves, which
induces a hierarchical venation network rooted on the
base point. The landmark extraction is a preliminary
yet necessary step toward a proper classification and
identification of the leaves. We applied successfully
the venation and base extraction on the palmate subset
of a more general database. As future work, we can
mention the classification of the leaves based on the
morphometric features, by the joint use of the blade,
the reconstructed venation network and the extracted
landmarks. Also, the discriminative power and sen-
sitivity of the descriptors against the number of vari-
eties and the amount of data are of principal interest.
ACKNOWLEDGEMENTS
This research has been conducted with the support
of the Agropolis Foundation through the Pl@ntNet
project. The authors would also like to thank
the members of the Pl@ntGrape case study, and
in particular Jean-Michel Boursiquot & Thierry La-
combe (INRA, UMR AGAP, DAVEM team), Thierry
Dessup (INRA, Vassal Domain) and Christophe
Sereno (INRA, UMR Amap).
REFERENCES
Comaniciu, D. and Meer, P. (2002). Mean shift: a robust
approach toward feature space analysis. IEEE Trans.
on PAMI, 24(5):603–619.
Coutaud, M. et al. (2009). Advances in taxonomic identifi-
cation by image recognition with the generic content-
based image retrieval Ikona. In e-Biosphere.
Levkowitz, H. and Herman, T. (1993). GLHS: A gen-
eralized Lightness, Hue, and Saturation color mod-
els. CVGIP: Graphical Models and Image Process-
ing, 55(4):271–285.
Nam, Y. et al. (2008). A similarity-based leaf image
retrieval scheme: Joining shape and venation fea-
tures. Computer Vision and Image Understanding,
110(2):245–259.
OIV expert group “Vine selection” (2009). The OIV de-
scriptor list for grape varieties and Vitis species. Tech-
nical report, International Organisation of Vine and
Wine (OIV).
Park, J.-K. et al. (2006). A venation-based leaf image classi-
fication scheme. In Information Retrieval Technology,
volume 4182 of LNCS, pages 416–428. Springer.
Soille, P. and Talbot, H. (2001). Directional morphological
filtering. IEEE Trans. on PAMI, 23(11):1313–1329.
Zana, F. and Klein, J. (2001). Segmentation of vessel-like
patterns using mathematical morphology and curva-
ture evaluation. IEEE Transactions on Image Process-
ing, 10(7):1010–1019.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
524
