
ADAPTIVE COMPENSATION SIGNAL FOR A WHEELCHAIR
CONTROL USING ANFIS MODEL
Anouboudem Kinfack Fabrice Prosper, Djouani Karim and Hamam Yskandar
French South African Institue of Technology, Department of Electrical Engineering, Tshwane University of Technology
Staatsartillerie Road, Pretoria, South Africa
Keywords:
Neuro-Fuzzy inference, Bayes net, Human behaviour modelling, Autonomous vehicle navigation.
Abstract:
Wheelchairs users still face challenges when driving their standard design based vehicle. Given the matter, this
work aims to implement an assisted control for a wheelchair, depending on the driving behaviour of the user.
Therefore, a Bayesian network model will be implemented to help infer on the human behaviour. Thereafter,
the inferred state of the user will serve as input to an ANFIS model. The role of the ANFIS model is to
generate an assistive signal in order to compensate the input from the user.
1 INTRODUCTION
Assistive control aims to provide enhancements to
the technology in order to reduce people’s handi-
cap by enabling them to perform tasks they were
not able to achieve formerly. As an example, the
motion in the environment has been facilitated by
the use of wheelchairs. However, the use of stan-
dard wheelchairs brings up the issue of handling,
as users suffer from different neuromuscular impair-
ments. Therefore, there is a need to come up with a
design that will be adapted to a specific user. This
feature requires the vehicle to recognize the opera-
tion initiated by the user. In other terms, the device
must learn the driving behaviour of the user. Then,
the recognized human behaviour will help a naviga-
tion system to generate an assistive signal in order to
compensate the handicap of the user.
Even though several approaches have been imple-
mented to achieve the objective of modelling the hu-
man behaviour, very address the case of wheelchair
driving activity. Therefore, this work reviews studies
conducted in the domain of human behaviour mod-
elling on car driving activity.
The optimal control approach (Burnham et al., 1974)
considers the human as an optimal controller and
tries to identify some parameters liable to influence
the driver behaviour; however, the authors admit that
too many assumptions were made to come up with
the proposed model. The closed loop based model
(Thakur,1997) includes the mechanical time response
(from the vehicle) and the human time response which
is assumed to be a function of a daydream factor to de-
termine.
Although the cognitive architecture (Dario Salvucci
and Liu, 2001) seems to be more realistic, the model
is difficult to implement as it requires the measure-
ment of some internal states of the human operator
such as the HRV (Heart Rate Variability).
In the other hand, many other studies have consid-
ered a model based on external observations. Among
others, we can mention polynomial models (Koashi
et al., 2003; Kim et al., 2004), data clustering ap-
proach (Suzuki et al., 2005), Hidden Markov Models
(Kuge et al., 1998) and Bayesian Networks (Bouslimi
et al., 2005). However, the comparison of Hidden
Markov Model and Bayes net model (Tezuka et al.,
2006) revealed that Bayesian network provided bet-
ter inference even though HMM detect the change of
operation earlier.
The method referred to as potential field (Koren
and Boreinstein, 1991; Masoud, 2002) assumes the
presence of different forces applied to the vehicle: re-
pulsive forces are generated by obstacles while the
target point applies an attractive force to the vehi-
cle. The magnitude of the repulsive force is propor-
tional to certainty value (how confident the algorithm
is in the presence of an obstacle) and inversely propor-
tional to the distance between the centre of the robot
and the obstacle.
However, KOREN (Koren and Boreinstein, 1991)
identifies four major issues associated in the applica-
tion of the method:
• Trap situations due to local minima
123
Anouboudem Kinfack Fabrice P., Yskandar H. and Karim D..
ADAPTIVE COMPENSATION SIGNAL FOR A WHEELCHAIR CONTROL USING ANFIS MODEL.
DOI: 10.5220/0003537801230129
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 123-129
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

• No passage between two close obstacles.
• Disturbances of the obstacle cause oscillations
• Oscillations in narrow passages
EMAM’s work (EMAM, 2010) on wheelchair driver
behaviour also represents the influence of obstacles
on the driver by similar forces (mostly repulsive), ex-
cept that the attractive force depends on the driver.
Another reference (Chakravarthy and Ghose, 1998)
proposes the concept of collision cone, for collision
avoidance situations. Given a vehicle and an obsta-
cle, the authors find the locus of directions of the ve-
hicle for which there may be a collision. The collision
cone is found to be a function of the velocities of the
vehicle and the obstacle, their direction, the distance
separating them and also their shape. Therefore, in
case of possible collision (when the vehicle’s velocity
vector lies within the collision cone), the speed and
direction can be modified to bring the velocity vector
out of the collision cone. The strategy to adopt de-
pends on the time and kinematics constraints of the
vehicle. The same concept is has also been adopted
in a multi-obstacle environment (Fiorini and Shiller,
1998).
Langer et al. (Langer et al., 1994) proposed a method
for a behavioural response based on the DAMN ar-
chitecture framework developed by J. K. Rosenblatt
(Rosenblatt, 1997); the architecture is comprised of
three parts:
• The perception module processes the images
taken of the surrounding environment and iden-
tifies traversable regions of the terrain.
• The management module generates a map repre-
senting the surrounding terrain.
• The planning module issues the commands sig-
nals.
All the actions of the architecture are working asyn-
chronously, sending their outputs to an arbiter which
evaluates the prevailing one. Unfortunately, the au-
thors (Langer et al., 1994) found the inability to deal
with close ends as the most important and common
failure when implementing such an architecture; this
is because the system only deals with local represen-
tation of the terrain. Moreover, the speed of the ve-
hicle is limited by the maximum range of the sensors
and by the image acquisition rate. In addition to the
latency for the full acquisition of an image, the map
generation also contributes to a non real time archi-
tecture.
Another behaviour based approach (Yinka-Banjo,
2010) uses the Bayesian network model for inference.
First, the robot is guided through an environment with
obstacles. A database of distance to obstacles and ma-
noeuvres of the (human) operator is updated; then, a
Bayesian network is built from the data gathered. This
network will serve as required knowledge of the robot
for obstacle avoidance behaviour.
NEFTI et al. (Nefti et al., 2001) proposed an ANFIS
model where they define three main tasks, each one
representinga module that implements an ANFIS sys-
tem, with sensors information as input and orientation
of the robot as output. A fusion strategy implemented
by a neural network selects the most appropriate out-
put, given the information from the sensors.
A reference (Ayari and Chatti, 2007) defined two ma-
jor tasks to be executed by the robot whilst another
one (Shimizuhira et al., 2004) defined three. Even
though ARAGHI and MENHAJ (Araghi and Menhaj,
2008) adopted a different approach using the concept
of collision cones, all three studies implement a fuzzy
controller serving as the decision making module.
Given the comparison of Bayesian net and Hidden
Markov Model (Tezuka et al., 2006), even though the
speed of state detection is an important aspect, this
work favours the accuracy of the model as it will be
applied to a wheelchair, which is not supposed to be
as fast as a car.
Thereafter, a navigation system will be implemented
using an adaptive Neuro-Fuzzy Inference System to
generate the assistive control reference.
2 DRIVING STATE INFERENCE
USING BAYES NETWORK
This section will briefly present the model imple-
mented for the driving task inference, as the result is
an input of the Neuro-Fuzzy model.
The model considers a scenario where the
wheelchair’s user moves from a point A to a
point B following a straight line, and an obstacle
is standing on the way, or moving across the path
(figure 1).
Hence the following four states are thus defined:
• State 1 (Straight line driving task): the vehicle
goes from A to B without any obstacle on the path
• State 2 (Slow change of trajectory): the user
avoids an obstacle which is far ahead (or moving
slowly).
• State 3 (Rapid manoeuvre): the user initiates an
emergency collision avoidance manoeuvre.
• State 4 (Recovery, from rapid manoeuvre): the
driver defines a new trajectory to the destination
after an obstacle avoidance manoeuvre.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
124
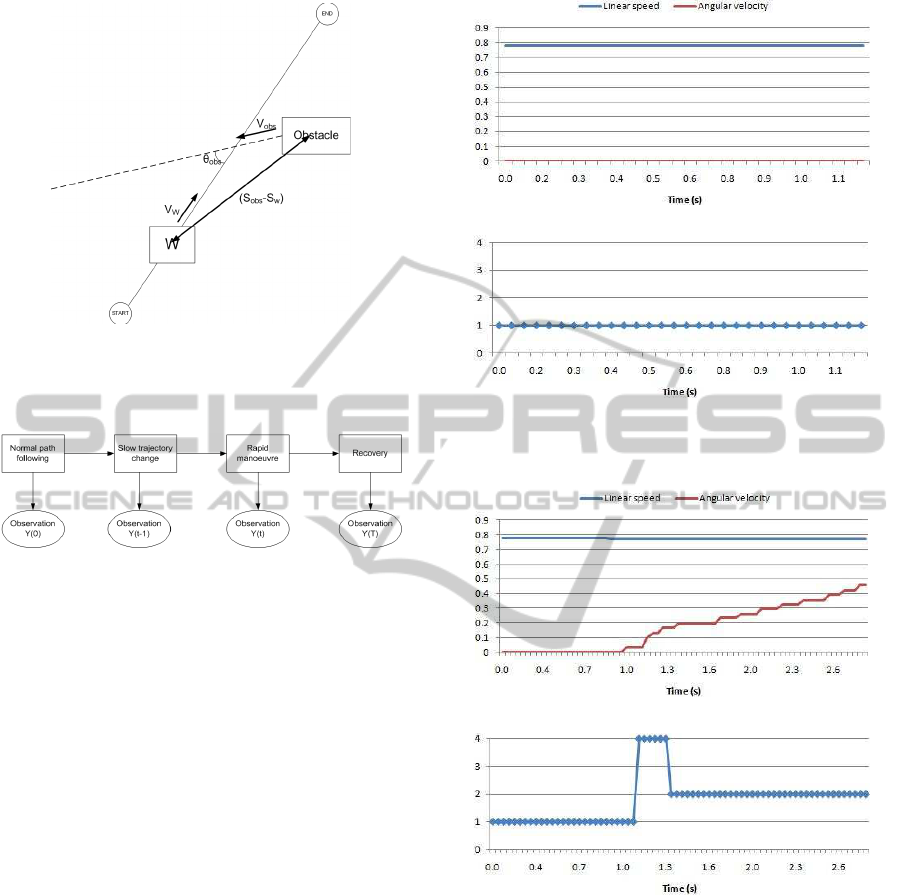
Figure 1: Scenario representation.
The structure of the model is assumed to be known
and is presented on figure 2.
Figure 2: Bayesian network model.
Therefore, the model estimation is reduced to the
estimation of the parameters. The judgment X(t) is
a discrete variable representing the actual state of the
driving task, while the observation Y(t) is the distri-
bution of observed information, namely the command
signal for the linear velocity and the command signal
for the angular deviation which are both measurable
at the output of the controller (in this case, a joystick).
MURPHY (Murphy, 2007) developed a Bayes Net
Toolbox for Matlab, which implements the EM (Ex-
pected Maximization) algorithm to find local optimal
maximum likelihood estimates of the parameters. The
model training is performed as the combination of
time-series judgment states and observed data at that
time.
The results shown in figures 3, 4, 5 and 6 compare
the data from the controller and the states inferred by
the model. This validates the aptitude of the model at
inferring on human behaviour in wheelchair driving
activity.
3 ANFIS MODEL
3.1 The Theory Reviewed
A simple representation of ANFIS architecture (Jang,
1993) is presented in figure 7.
(a) Test data
(b) Estimated state
Figure 3: State 1: Normal path following.
(a) Test data
(b) Estimated state
Figure 4: State 2: Slow trajectory change.
The functions of the layers as defined by DENAI
et al. (Denai et al., 2004) are:
• Layer 1 generates the membership grades
• Layer 2 generates the firing strengths by multiply-
ing the incoming signals and outputs the t-norm
operator result.
• Layer 3 normalizes the firing strengths
• Layer 4 calculate rules outputs based on the con-
sequent parameters
• Layer 5 computes the overall output as the sum-
ADAPTIVE COMPENSATION SIGNAL FOR A WHEELCHAIR CONTROL USING ANFIS MODEL
125
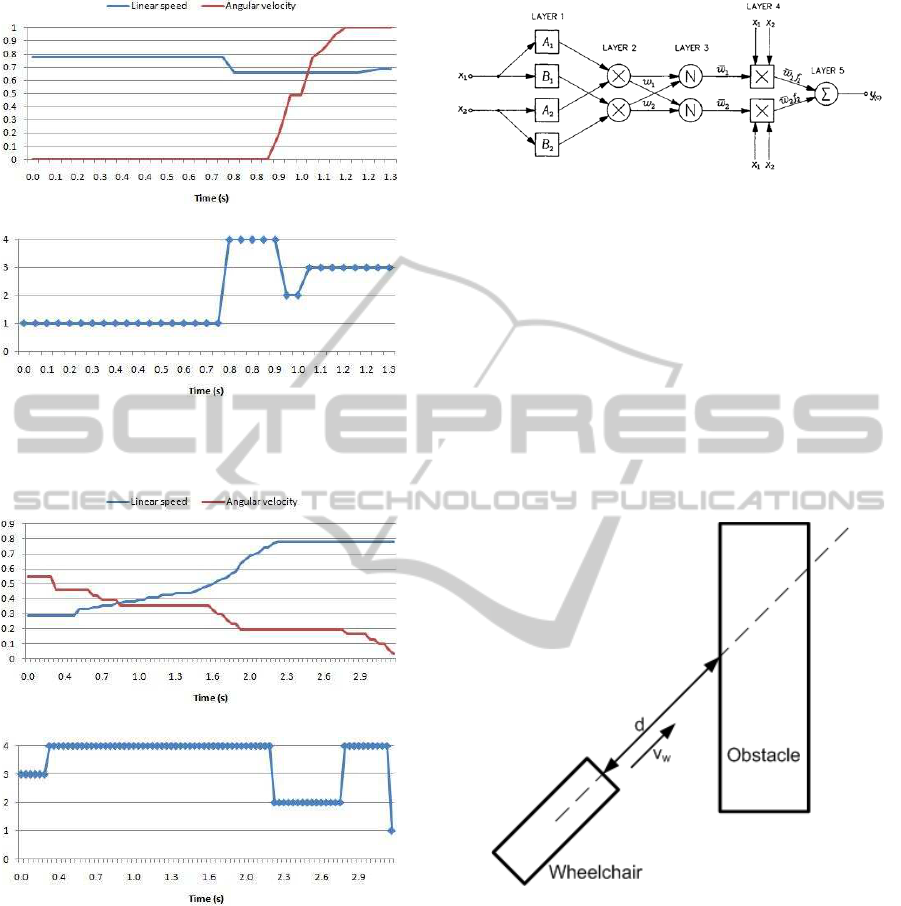
(a) Test data
(b) Estimated state
Figure 5: State 3: Rapid manoeuvre.
(a) Test data
(b) Estimated state
Figure 6: State 4: Recovery.
mation of incoming signals.
There are basically two classes of learning algorithm
for ANFIS architecture:
• In the forward pass, outputs of the nodes go for-
ward until the fourth layer where least square
methods are used to identify the conclusions.
• In the backward pass of the hybrid algorithm,
errors signals are now propagated backwards
and the gradient descent method updates the an-
tecedent parameters.
Figure 7: ANFIS architecture.
3.2 Model Definition
Our model is supposed to generate an adequate con-
trol signal, given the driving state of the driver and the
environmental influences. The only external (major)
factor considered in this study is the obstacle, which
may be mobile or static; therefore, the influence of the
surrounding environment is reduced to the distance
between the vehicle and the obstacle. Note that the
considered distance is measured from the vehicle to
the closest impact point of the vehicle, following the
displacement direction of the chair (see figure 8).
Figure 8: distance measured between the vehicle and the
obstacle.
The general scheme of the model to implement for
this task (figure 9) is very close to the one proposed
by NEFTI et al. (Nefti et al., 2001). Four possible
responses (each one corresponding to a driving state
of the wheelchair driver) are computed given the dis-
tance to the obstacle, and the driving state inferred by
the Bayesian network will choose the adequate out-
put.
The distance to collision is considered to be the
only input of the different systems, and each system
will output two signals: the linear speed and the an-
gular deviation. Now, lets define the rules of the dif-
ferent systems.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
126

Figure 9: ANFIS model general scheme.
State 1. In the first state, the driver follows a straight
line to the target. Therefore, the angle is supposed
to remain zero, and the linear velocity is supposed to
remain at an average value depending on the users be-
haviour.
Angle ≈ 0
Linear velocity ≈ V
avg
State 2. The second state corresponds to the slow
change of trajectory. Here, we consider the two out-
puts: the speed and the angular deviation.
If the obstacle is far, then the speed is normal and the
direction changes very slowly
If the obstacle is close, then the speed is slow and the
direction changes slowly
State 3. The obstacle is relatively very close, and per-
haps moving towards the vehicle, the driver initiates
emergency obstacle avoidance.
If the obstacle is far, then the speed is slow and the
direction changes slowly
If the obstacle is close, then the speed is very slow
and the direction changes quickly
State 4. It would not be appropriate to consider the
distance to collision in this case as the vehicle has
overcome the obstacle and the driver tries to define
the new trajectory to the target. Therefore, the goal
is to get back to the normal driving path, which can
be defined by normal linear velocity and no angular
deviation (just like in state 1).
4 RESULTS
The experiments conducted permitted to gather the in-
formation about the X and Y position of the vehicle,
as well as the deviation angle; those parameters are
used to compute the distance between the vehicle and
an obstacle on its way.
As mentioned in the previous section, only the
second and third phases of the driving behaviour are
Figure 10: Initial membership functions.
subject to a Neuro-Fuzzy controller, as the two other
states will have constant references.
The toolbox generates initial membership func-
tions (figure 10) and uses the backpropagation algo-
rithm for parameter tuning. The resulting member-
ship functions of figures 11, 12 and 14 represent the
membership grades as functions of the distance to col-
lision.
Figure 11: Final membership functions: state 2.
In figure 11, the bell-shaped function representing
the set of close distances has its center at about 2.7m
while the distance is more likely to be considered as
far from the value of about 3.1m.
Even though the first function of figure 12 looks
wider (regarding the input range) than that of the fig-
ure 11, the range is considerably smaller (from 0.7m
to about 1.4m).
The two functions depicted in figure 14 have al-
most same widths of about 0.25m. From 1.2m to
0.85m, the user considers the distance to be critical;
moreover, the narrowness of the function and the very
small overlap with the function express a decision
making process involving a limited output range.
Figures 13 to 15 compare the data from the user
and the data generated by ANFIS models. The re-
sponse of the ANFIS model in the third state shows a
ADAPTIVE COMPENSATION SIGNAL FOR A WHEELCHAIR CONTROL USING ANFIS MODEL
127
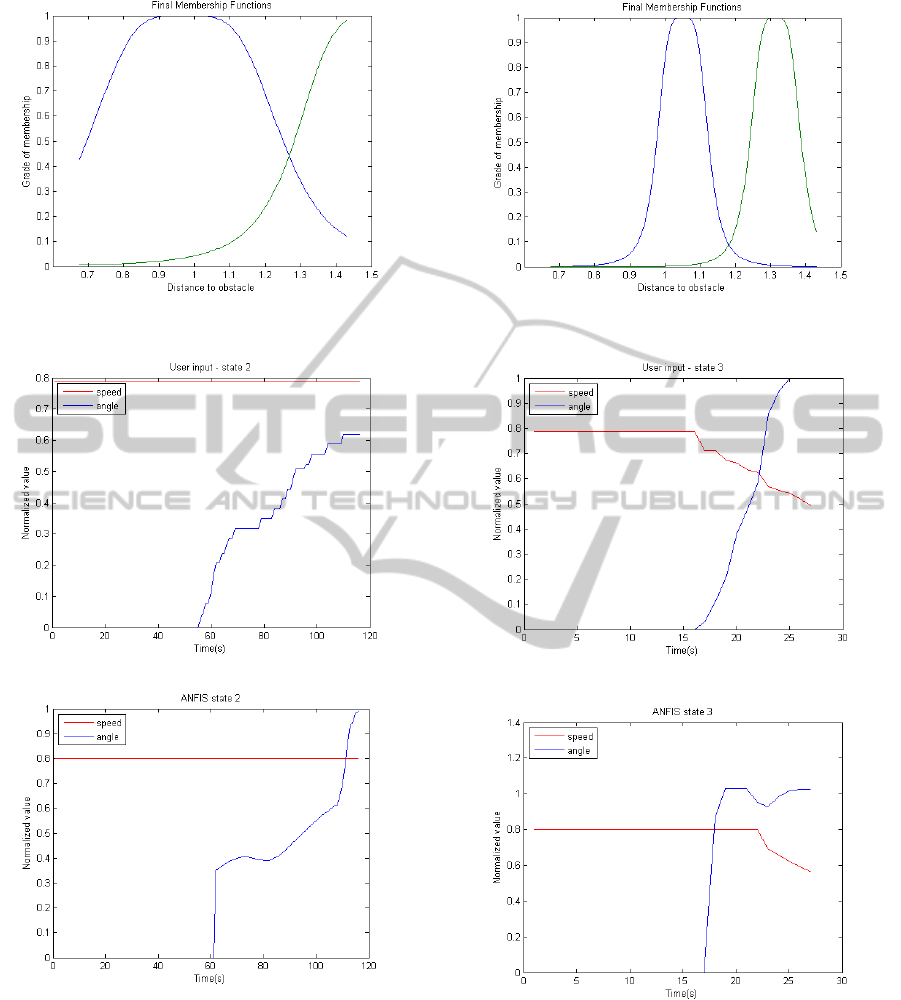
Figure 12: Membership functions for angle inference in
state 3.
(a) Signal from the Joystick
(b) ANFIS generated signal
Figure 13: State 2: Slow trajectory change.
delay in reducing the linear velocity, however the an-
gle reference tries to avoid the obstacle (changing the
direction) as soon as the state is detected. Moreover,
the model initiates a reduction of the speed when the
driving task persists. Finally, we can note the return
to the normal behaviour (maximum speed and no de-
viation) when the vehicle has overcame the obstacle.
Figure 14: Membership functions for speed inference in
state 3.
(a) Signal from the Joystick
(b) ANFIS generated signal
Figure 15: State 3: Collision avoidance manoeuvre.
5 CONCLUSIONS
The results show the possibility of an assisted con-
trol adapted to the behaviour of the user. The imple-
mented ANFIS model is to serve as generator of the
reference signal for the user input. The combination
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
128

of the two signal is the input to the wheelchair sys-
tem. A future improvement of the overall system may
include a state estimator at the output of the system,
in order to implement a feedback controller using op-
timal control theory.
ACKNOWLEDGEMENTS
The authors would like to thank the Tshwane Uni-
versty of Technology (TUT) for the financial support,
and also the French South African Institute of Tech-
nology (F’SATI) for providing the necessary tools
permitting to conduct this work.
REFERENCES
Araghi, M. H. and Menhaj, M. B. (2008). A combined col-
lision cone and fuzzy based obstacle avoidance algo-
rithm for the small size soccer robots. International
Conference on Automation, Robotics and Control Sys-
tems, pages 151–158.
Ayari, I. and Chatti, A. (2007). Reactive control using be-
haviour modelling of a mobile robot. International
Journal of Computers, Communications & Control,
Vol. II, pages 217–228.
Bouslimi, W., Kassaagi, M., Lourdeaux, D., and Fuchs, P.
(2005). Augmented nave bayesian network for driver
behaviour modelling. Intelligent Vehicles Symposium,
IEEE Proceedings.
Burnham, G. O., Seo, J., and Bekey, G. A. (1974). Identifi-
cation of human driver models in car following. IEEE
transactions on automatic control.
Chakravarthy, A. and Ghose, D. (1998). Obstacle avoidance
in a dynamic environment: A collision cone approach.
IEEE transactions on systems, Man and cybernetics
part A: systems and human, Vol. 28.
Dario Salvucci, E. R. B. and Liu, A. (2001). Toward an
integrated model of driver behaviour in a cognitive ar-
chitecture. Transportation Research Record.
Denai, M. A., Palis, F., and Zeghbib, A. (2004). Anfis based
modelling and control of non-linear systems: a tuto-
rial. IEEE International Conference on Systems, Man
and Cybernetics, pages 3433–3438.
Emam, H. (2010). dynamic modelling and control for the
electronic wheelchair. PhD thesis, University of Ver-
sailles, France.
Fiorini, P. and Shiller, Z. (1998). Motion planning in dy-
namic environment using velocity obstacles. Interna-
tional Journal of Robotics Research, Vol. 17, pages
760–772.
Jang, J.-S. R. (1993). Anfis: Adaptive-network-based fuzzy
inference systems. IEEE Trans. on Systems, Man, and
Cybernetics, vol. 23, pages 665–685.
Kim, J.-H., Hayakawa, S., Suzuki, T., Hayashi, K., Okuma,
S., Tsuchida, N., Shimuzu, M., and Kido, S. (2004).
Modelling of drivers collision avoidance behaviour
based on piecewise linear model. IEEE conference
on decision and control.
Koashi, M., Hayakawa, S., Suzuki, T., Okuma, S.,
Tsuchida, N., Shimuzu, M., and Kido, S. (2003).
Measurement and modelling of collision avoidance
behaviour of drivers using three dimensional driving
simulator. SICE annual conference in FUKUI.
Koren, Y. and Boreinstein, J. (1991). Potential field meth-
ods and their inherent limitations for mobile robot
navigation. Proceedings of the IEEE Conference on
Robotics and Automation, pages 1398–1404.
Kuge, N., Yamamura, T., Shimoyama, O., and Liu, A.
(1998). A driver behaviour recognition method based
on a driver model framework. society of automotive
engineers.
Langer, D., Rosenblatt, J., and Hebert, M. (1994). A
behavior-based system for off-road navigation. IEEE
Trans. Robotics and Automation, Vol. 10, No. 6, pages
776–782.
Masoud, A. A. (2002). Evasion of multiple, intelligent pur-
suers in a stationary, cluttered environment: A har-
monic potential field approach. Proceedings of the
IEEE International Symposium on Intelligent Control.
Murphy, K. (2007). Bayes net toolbox for matlab.
http://code.google.com/p/bnt/.
Nefti, S., Oussalah, M., Djouani, K., And Pontnau, J.
(2001). Intelligent adaptive mobile robot naviga-
tion. Journal of Intelligent and Robotic Systems, pages
311–329.
Rosenblatt, J. K. (1997). DAMN: A Distributed Architec-
ture for Mobile Navigation. PhD thesis, The Robotics
Institute of Carnegie Mellon University, Pittsburgh,
Pennsylvania.
Shimizuhira, W., Fujii, K., and Maeda, Y. (2004). Fuzzy
behavior control for autonomous mobile robot in dy-
namic environment with multiple omnidirectional vi-
sion system. Proceedings of IEEE /RSJ International
Conference on Intelligent Robots and Systems.
Suzuki, T., Yamada, S., Hayakawa, S., Tsuchida, N., Tsuda,
T., and Fujinami, H. (2005). Modelling of drivers
collision avoidance behavior based on hybrid system
model an approach with data clustering.
Tezuka, S., Soma, H., and Tanifuji, K. (2006). A study
of driver behaviour inference model at time of lane
change using bayesian networks. Proceedings of IEE,
ICIT.
Thakur, K. P. (1997). Simulation of driver behaviour as a
function of driver error and driver daydream factor.
Yinka-Banjo, C. O. (2010). Collision avoidance in un-
structured environments for autonomous robots: A
behavioural modelling approach. Master’s thesis,
African Institute for Mathematical sciences, Cape
Town, South Africa.
ADAPTIVE COMPENSATION SIGNAL FOR A WHEELCHAIR CONTROL USING ANFIS MODEL
129
