
STATE INDEPENDENT RESOURCE MANAGEMENT
FOR DISTRIBUTED GRIDS
Aysan Rasooli and Douglas G. Down
Department of Computing and Software, McMaster University, Main St. West, Hamilton, Canada
Keywords:
Grid scheduling, Scheduling algorithms, Shadow routing approach.
Abstract:
In practice, a scheduling algorithm should consider multiple objectives. Typically, there are two kinds of ob-
jectives. The first is the performance of the system in terms of quantities related to the completion time of
tasks, the second is the amount of state information required, which is often measured in terms of quantities
such as communications costs. These two objectives are often in tension with one another. In this work, we
introduce a scheduling algorithm which simultaneously addresses the objectives listed above namely, min-
imizing completion times, while requiring zero dynamic state information. Using simulation, we show the
promising performance of our algorithm, and its robustness with respect to errors in parameter estimates.
1 INTRODUCTION
Task scheduling is an integral part of a distributed
computing system. The scheduling algorithm in-
volves matching of application needs with resource
availability. Grid scheduling is a problem with mul-
tiple objectives, and it is extremely difficult to satisfy
all of the objectives with one scheduling algorithm.
To the best of our knowledge there is no single Grid
scheduling algorithm which is the optimum over all
Grid systems with their different applications and fea-
tures. In this work, we address the scheduling prob-
lem of Grid systems whose resources are widely dis-
tributed, and there is a considerable communication
cost between the resources. The most well-known
application of these Grid systems is in the Enabling
Grids for E-sciencE (EGEE) (Erwin and Jones, 2009)
project. The main contributions of our work are:
• We bring a theoretical idea from the literature (the
so-called Shadow Routing algorithm), to a prac-
tical scheduling algorithm implemented in Grid
systems.
• We modify this basic theoretical approach to be
efficient for Grid systems, and study the advan-
tages of the proposed algorithm in widely dis-
tributed Grid systems.
In general, the Grid scheduling algorithm should
improve the performance of the Grid system, which
can be evaluated by various criteria such as Flowtime
or Makespan. Furthermore, if an algorithm reduces
the amount of state information required at the time
of scheduling, this leads to reductions in the com-
munication cost and synchronization overhead. In
fact, a large system that requires full state informa-
tion for scheduling may suffer from increasing limita-
tions due to significant communication and synchro-
nization overheads.
The Shadow Routing method is a robust, generic
scheme, introduced in (Stolyar and Tezcan, 2009) for
routing of arriving tasks in systems of parallel queues
with flexible, many-server pools. This algorithm has
proven to achieve good performance levels in queu-
ing systems. However, its structure is designed in a
way which is not directly applicable in Grid systems.
In this paper we modify the structure of the Shadow
Routing approach in two key ways, and introduce
a scheduling algorithm for Grid systems, called the
Grid Shadow Routing algorithm. First, we change the
structure of the basic Shadow Routing algorithm to be
applicable for a typical Grid workload model (Iosup
et al., 2006). Second, we add to the basic Shadow
Routing algorithm, which causes significant improve-
ment in its performance in Grid systems.
The Grid Shadow Routing algorithm uses virtual
queues to keep track of the loads on resources in the
system. These are used as estimates of the actual
queue lengths in the system, thus removing the need
to gather real-time load information. The only infor-
mation that the Grid Shadow Routing algorithm re-
quires are estimates of the lengths of tasks and the
execution rates of resources in the system. By using
131
Rasooli A. and G. Down D..
STATE INDEPENDENT RESOURCE MANAGEMENT FOR DISTRIBUTED GRIDS.
DOI: 10.5220/0003469701310136
In Proceedings of the 6th International Conference on Software and Database Technologies (ICSOFT-2011), pages 131-136
ISBN: 978-989-8425-76-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

this information, the algorithm properly balances the
loads on the resources. The two estimated parame-
ters are used in most Grid scheduling algorithms. In
order to provide this information various prediction
methods are applied to forecast them, and in turn to
guide task scheduling and load balancing strategies to
achieve high performance and more efficient resource
usage (Zhang et al., 2006; Lu et al., 2004). An im-
portant advantage of our algorithm is that it does not
require highly accurate estimates- even highly inac-
curate estimates can be satisfactory for our algorithm.
Generally, based on the information that can be
used, and the timing of the scheduling decision,
scheduling algorithms are classified as either static
or dynamic algorithms. Static scheduling algorithms
do not use any dynamic state information, but there
can be a huge performance degradation in comparison
to dynamic algorithms. On the other hand, dynamic
scheduling algorithms can make better scheduling de-
cisions, while increasing the communication cost. If
a Grid system has low communication overhead, a
dynamic scheduling algorithm with full state infor-
mation can make a significant improvement in the
performance of the system. On the other hand, in a
widely distributed system in which the time to gather
full state information is significant (as in the systems
in which we are interested), a dynamic scheduling
algorithm which requires full state information can
potentially create severe additional overheads. The
main advantage of our proposed Grid Shadow Rout-
ing algorithm is that it requires zero state information
from resources at the time of scheduling, and it can
achieve much better performance than dynamic algo-
rithms that require full state information. This is par-
ticularly advantageous for large, highly loaded sys-
tems with widely distributed resources, where com-
munications costs are significant.
Using simulation, we evaluate the Grid Shadow
Routing algorithm by comparing to two other algo-
rithms. Minimum Completion Time (MCT) is a dy-
namic scheduling algorithm, commonly used in Grid
systems. This algorithm greedily attempts to reduce
the mean completion time, and does not consider the
communication overhead in scheduling. The second
algorithm that we employ is Join the Shortest Queue,
which uses partial state information and does not re-
quire task lengths in making scheduling decisions. In
order to evaluate the performance of our algorithm in
a real system in which the parameters may be esti-
mated inaccurately, we implement our algorithm in a
system which has various levels of error in the esti-
mates. Moreover, we evaluate our algorithm by us-
ing inaccurate parameters, to show that the significant
performance gain of our algorithm can be achieved
even in an environment in which there are errors in
estimating required parameters.
2 CURRENT ALGORITHM AND
RELATED WORK
In this section, rather than presenting a complete sur-
vey of current Grid scheduling algorithms, we list two
of the commonly used scheduling algorithms for Grid
environments, those for which we compare perfor-
mance with our proposed algorithm.
• Minimum Completion Time (MCT). Assigns each
task to the resource which has the minimum ex-
pected completion time for that task (Dong and
Akl, 2006). The expected completion time for
a newly arriving task will be computed at each
resource; the scheduler collects this state infor-
mation from all resources and chooses the re-
source with the minimum expected completion
time for execution of the new task. This algorithm
can cause a significant improvement in maximum
completion time of all tasks. However, it has the
cost of requiring full state information, and con-
sequently may have a large communication cost.
This algorithm requires the estimated length of in-
coming task, current resource execution rate, cur-
rent available bandwidth, and the real-time load
on each resource.
• Join the Shortest Queue
∗
(JSQ
∗
). This algorithm
assigns each task to the resource which has the
smallest number of waiting tasks in its queue. The
advantage of this approach is that it does not re-
quire the length of tasks to make a scheduling de-
cision. This algorithm just requires one parame-
ter: the real-time number of tasks in each resource
queue. However, this parameter should be col-
lected from all resources at the time of schedul-
ing.
3 PROPOSED ALGORITHM
In this Section we describe the problem of task
scheduling and our workload model. Then, we pro-
vide the details of our proposed scheduling algorithm.
3.1 Workload and System Model
In order to describe and evaluate our scheduling algo-
rithm, we define a workload model based on a typical
Grid workload (Iosup et al., 2006). In our workload
model, we let the number of resources in the system
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
132
be M. The actual resource execution rate for resource
r is given by µ
r
, and the task length for task k is given
by L
k
. We assume the use of one of the available es-
timation methods to provide estimates of resource ex-
ecution rates for all resources and the length of each
incoming task. We define the estimated length of task
k as
ˆ
L
k
, and the estimated execution rate of resource r
as ˆµ
r
.
In order to model a widely distributed Grid sys-
tem, we assume that the Grid network has associated
delays. The delay in the network is calculated based
on the bandwidth and the load on the Grid network.
When a task arrivesto the system, the Grid scheduling
algorithm is used to route the arriving task to one of
the available resources in the system. Here we assume
that all local schedulers are using the classical FIFO
algorithm, however in general each resource can use
its own local scheduling algorithm.
3.2 Grid Shadow Routing Algorithm
The basic Shadow Routing algorithm was first intro-
duced in (Stolyar and Tezcan, 2009) as an algorithm
for routing in systems of parallel queues. This algo-
rithm has significant advantage in properly balancing
the load of the system without requiring any state in-
formation. However, the basic Shadow Routing al-
gorithm is defined on a workload model which is not
applicable in Grid systems.
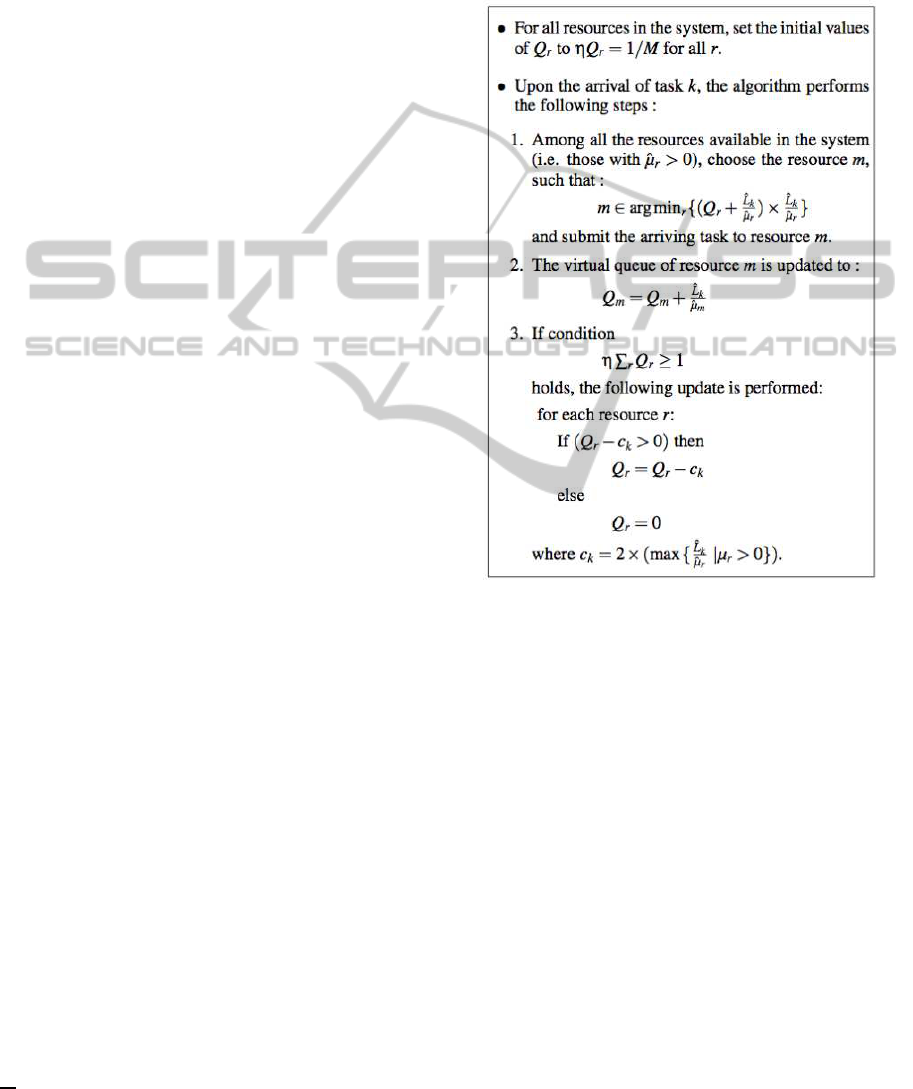
In this Section, we introduce a new Grid schedul-
ing algorithm, called the Grid Shadow Routing algo-
rithm (Grid Shadow), which is presented in Figure 1.
In order to apply the idea of the Shadow Routing al-
gorithm in Grid systems, first we should eliminate the
class-based setting of the basic Shadow Routing al-
gorithm. As we know, a Grid is a dynamic system in
which the resources may join and leave at any time,
and various types of tasks may be assigned to the sys-
tem. So, it is unrealistic to assume that we have pre-
defined types (class) of tasks, and that the execution
rate of each class on each resource is known.
Instead of using the workload model of the ba-
sic Shadow Routing algorithm, we consider each task
separately. We introduce our algorithm based on our
typical Grid workload model. As mentioned before,
various estimation methods have been introduced to
estimate task lengths and resource execution rates
(see (Zhang et al., 2006; Lu et al., 2004) for exam-
ple). Rather than going into detail on any particular
estimation method, we simply assume that such es-
timates have been provided, with associated errors.
By applying these two parameters, we estimate the
expected execution time of task k on resource r by
ˆ
L
k
ˆµ
r
, where
ˆ
L
k
and ˆµ
r
are estimates of the length of
task k and the execution rate of resource r, respec-
tively. Also, we assume that each resource has a vir-
tual queue (Q
r
), which is used to estimate loads on re-
sources, and the parameter η > 0 is used to control the
tradeoff between responsiveness of the algorithm and
its accuracy. In Grid scheduling, taking into account
Figure 1: The Grid Shadow Routing Algorithm.
the load that an incoming task adds to each resource,
is important when the resources are heterogeneous,
and the load of the system is moderate or light. The
basic Shadow Routing algorithm only considers the
current load of each resource in making the schedul-
ing decision for each incoming task. In our schedul-
ing decision, instead of comparing the current loads,
we consider the current size of the virtual queue plus
the expected load of the incoming task on the corre-
sponding resource. Another way to look at this is that
from an analytic perspective, if the load on the system
approaches 1 (as in (Stolyar and Tezcan, 2009)), then
the effect of the incoming task is negligible. This may
not be true in practice, and should be accounted for.
For each incoming task, we aim to increase the
total amount in the virtual queues by the minimum
possible amount, then the normalization step will be
triggered less frequently. This results in less overhead
due to scheduling decisions, which improves the per-
formance of the basic Shadow Routing algorithm sig-
STATE INDEPENDENT RESOURCE MANAGEMENT FOR DISTRIBUTED GRIDS
133

nificantly. Science Grid systems have a large number
of resources, and the basic Shadow Routing algorithm
requires searching over all resources to update all the
virtual queues. The algorithm will be more efficient,
if it reduces the number of time it triggers the virtual
queue updating process.
When a new task arrives to the system, our
scheduling algorithm considers three factors for
choosing a resource: the current load on each re-
source, the estimated execution time of the arriving
task on each resource, and the effect of the incoming
task on each resource load. So, we define the first
step of our algorithm as follows: the algorithm com-
pares the quantity ((Q
r
+
ˆ
L
k
ˆµ
r
) ×
ˆ
L
k
ˆµ
r
) for all resources,
and chooses the resource with the smallest value. The
algorithm has a trade-off between a resource which
finishes the currently assigned tasks earlier, and a re-
source which executes the incoming task faster. Also,
it aims to minimize the load which is going to be
added to each resource. The algorithm adds the es-
timated execution time of the task on the selected re-
source to the virtual queue of that resource, which is
given by
ˆ
L
k
ˆµ
m
for task k on resource m.
If the loads on faster resources increase such that
the proper balancing of loads is going to be vio-
lated, the total virtual queue length of all resources
will reach a predefined limit. In this case, the virtual
queue lengths of all resources are reduced by a spe-
cific amount. This is a normalization step of the al-
gorithm, by which the algorithm is making the virtual
queue length of slower resources smaller, and is in-
creasing the chance of slower resources being chosen
for executing future tasks. The parameter η should be
chosen based on the features of the system. For the
workloads considered in this work, we conclude that
a good value of η is 1/300.
Since the Grid Shadow Routing algorithm makes
each decision based on the values of virtual queues,
if task input rates, or resource execution rates change
in the system, no explicit detection of such an event
(or any other input rate measurement/estimation) is
necessary. The virtual queues automatically readjust
and the algorithm starts routing along the new best
matchings of resources to tasks.
4 EXPERIMENTAL SET-UP
We use simulation to evaluate the scheduling algo-
rithms. This section gives details of the simulation
toolkit used, the performance metrics applied, and
the experimental set-up. Simulation models were im-
plemented with the Java package GridSim (Buyya
and Murshed, 2002). Depending on the Grid sce-
nario and applications run in the system, there ex-
ist different performance metrics for evaluating Grid
scheduling algorithms. We use two of the most impor-
tant performance metrics to evaluate the algorithms
from different aspects. The metrics that we consider
are: Makespan (the maximum completion time of all
tasks), and Flowtime (the average completion time of
all tasks).
We consider a Grid system consisting of 50 ded-
icated resources with different CPU speeds, working
in parallel with an overall high load. To simulate a
widely distributed Grid system, and because the band-
width between elements of the system which are far
from each other is low, we set the bandwidth inside
the elements of the system to be 1 Gbps, and the band-
width between the scheduler and each of the 50 re-
sources to be 10 Mbps.
As mentioned before, our proposed algorithm is
mostly advantageous for EGEE Grids, so we evalu-
ate our algorithm in a real workload from the CERN
Grid project. We use a workload from the Grid Work-
load Archive, in Grid Workloads Format (GWF). This
workload is collected from the LCG project. The
LCG testbed represents the Large Hadron Collider
(LHC) Computing Grid. We use the LCG trace, ver-
sion 0.1 which is provided by the Grid Workloads
Archive (Iosup et al., 2006). We use the first 20,000
tasks in this trace for our experiment. We run our
simulation until 20, 000 tasks arrive to the system and
then wait until the system becomes empty.
Our algorithm uses estimates of the task lengths
and resource execution rates. However, various esti-
mation methods may have differentlevelsof accuracy.
So, we evaluate our algorithm in a system that has var-
ious levels of error in the estimated task lengths and
resource execution rates. In order to completely study
the robustness of our algorithm, we examine cases
that have 0% to 40% error in our estimates; however,
typically these errors are on the order of 10% (Akioka
and Muraoka, 2004). We evaluate our proposed al-
gorithm by considering the error model discussed in
(Iosup et al., 2008) for estimating task lengths and re-
source execution rates. Generally the two models of
error in these estimates are:
• Over and Under Estimation Error. In our sim-
ulations,
ˆ
L
k
and ˆµ
r
are obtained using the fol-
lowing relations:
ˆ
L
k
= L
k
× (1 + E
k
) and ˆµ
r
=
µ
r
× (1 + E
r
). Here, E
k
and E
r
are the errors for
task lengths and resource execution rates, respec-
tively, which are sampled from the uniform distri-
bution [−I, +I], and I is the maximum error.
• Over Estimation Error. The main error models
are obtained using the relations
ˆ
L
k
= L
k
×(1+E
′
k
)
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
134

and ˆµ
r
= µ
r
× (1+ E
′
r
). The parameters E
′
k
and E
′
r
are the errors for task lengths and resource exe-
cution rates, respectively, and are sampled from
the uniform distribution [0,+I], in which I is the
maximum error. This model is used for systems
which always over estimate the parameters (pow-
ers of resources are estimated to be the maximum
amount without considering fluctuation of their
power caused by increasing the load).
5 EXPERIMENTAL RESULTS
In this Section we consider the various error mod-
els. The complete results of our experiments are pro-
vided in (Rasooli and Down, 2011), and for the sake
of space, we will not present those results in this pa-
per.
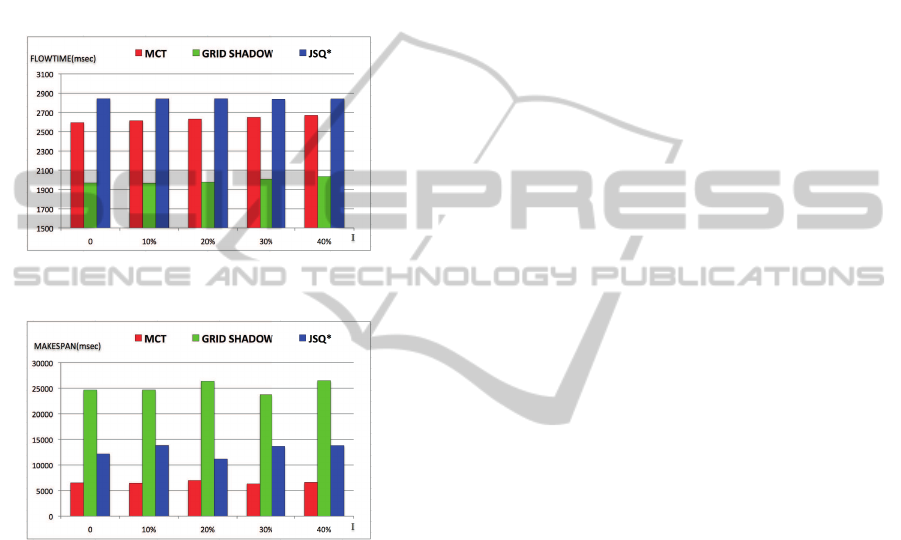
5.1 Over and Under Estimation
In this part, we assume the over and under estimation
error model applies. First, we evaluate our algorithm
in an environment with accurate resource execution
rates, and errors in estimating task lengths, whose re-
sult, from the Flowtime perspective, is provided in
Figure 2. Then, we consider an environment with
Figure 2: Flowtime-over & under estimating task length.
errors in estimating both task lengths and resource
execution rates, whose result is provided in Figure
3. Different error levels are considered in these fig-
ures. Among the algorithms presented in this work,
the MCT algorithm is the only one that uses full state
information in order to make scheduling decisions.
So, we expect that in the absence of overhead, this
algorithm should achieve the smallest Makespan and
Flowtime, and should lead to a good balance between
the loads of resources. Since our simulations con-
sider a highly loaded system, in which gathering full
state information causes large overhead, the MCT al-
gorithm can not achieve good Flowtime compared to
our proposed algorithm. However, the MCT algo-
rithm does achieve the best Makespan by minimiz-
ing the completion time for each individual incom-
ing task. Generally, minimizing Flowtime can be at
the expense of the largest task taking a long time,
whereas minimizing Makespan asks that no task takes
too long, at the expense of most tasks generally taking
a longer time. In summary, minimizing Makespan can
result in maximizing Flowtime. So, the poor Flow-
time performance of the MCT algorithm results from
the combination of its high overhead and its greedy
approach in minimizing the completion time for each
individual task. Since the Grid Shadow Routing algo-
Figure 3: Makespan-over & under estimating task length &
resource rate.
rithm does not use any state information, one might
expect a large difference between its performance and
the MCT algorithm. However, the results illustrate
that our algorithm has much better Flowtime than the
MCT algorithm. This is due to the fact that the Grid
Shadow Routing algorithm does not use the greedy
view point of the MCT algorithm in optimizing the
completion time for any single task. Instead, our pro-
posed algorithm considers a long term approach for
minimizing the completion times, and balancing the
loads in the system, so it can achieve good perfor-
mance for aggregate metrics like Flowtime. Another
reason for better Flowtime of our algorithm compared
to the MCT algorithm is the large overhead of the
MCT algorithm in gathering full state information
from the system, while our proposed algorithm has
no such overhead. As the Grid Shadow Routing algo-
rithm does not have the goal of minimizing the com-
pletion time for each individual task, and it considers
overall balancing of loads, this can increase the com-
pletion time for a small number of tasks, which results
in larger Makespans for the Grid Shadow Routing al-
gorithm. Still, its Makespan is competitive with the
JSQ
∗
algorithm. We believe that in some Grid sys-
tems the Flowtime (which is interpreted as QoS (Mah-
eswaran et al., 1999)) of the system is more important
than the Makespan (which is interpreted as through-
put of the system). According to the results, even in
systems which have large estimation errors, our pro-
STATE INDEPENDENT RESOURCE MANAGEMENT FOR DISTRIBUTED GRIDS
135
posed Grid Shadow Routing algorithm still has much
better Flowtime than the MCT algorithm.
5.2 Over Estimation
In this part, we assume the over estimation error
model applies. First, we evaluate our algorithm in
an environment with various error levels in estimat-
ing task length, whose result is provided in Figure 4.
Figure 4: Flowtime-over estimating task length.
Figure 5: Makespan-over estimating task length and re-
source rate.
Later, we consider an environment with error in both
task length and resource execution rate estimation,
whose result is provided in Figure 5. Different error
levels are considered in these figures. Based on the re-
sults, up to 40 percent over estimation does not signif-
icantly affect performance of our algorithm. The Grid
Shadow Routing algorithm has the best Flowtime and
the MCT algorithm has the best Makespan. To sum-
marize the observations in this section, in a real Grid
workload, the Grid Shadow Routing algorithm has
much better Flowtime than the MCT algorithm, and
the Grid Shadow Routing algorithm achieves this per-
formance without collecting any state information.
The MCT algorithm achieves the best Makespan at
the cost of collecting full state information. So, our
Grid Shadow Routing algorithm is a promising can-
didate for widely distributed, and highly loaded Grid
systems.
ACKNOWLEDGEMENTS
This work was supported by the Natural Sciences and
Engineering Research Council of Canada. The LCG
Grid traces are provided by the HEP e-Science group
at Imperial College London.
REFERENCES
Akioka, S. and Muraoka, Y. (2004). Extended forecast of
cpu and network load on computational grid. In Pro-
ceedings of the 4th IEEE International Symposium on
Cluster Computing and the Grid(CCGrid’04), pages
765–772, USA. IEEE Computer Society.
Buyya, R. and Murshed, M. (2002). Gridsim: A toolkit for
the modeling and simulation of distributed resource
management and scheduling for grid computing. Con-
currency and Computation: Practice and Experience,
14(13-15):1175–1220.
Dong, F. and Akl, S. G. (2006). Scheduling algorithms for
grid computing: State of the art and open problems.
Technical Report 504, School of Computing, Queens
University, Canada.
Erwin, L. and Jones, B. (2009). Enabling grids for e-
science: The egee project, egee-pub- 2009-001.
Iosup, A., Li, H., Jan, M., Anoep, S., Dumitrescu, C., and
et al. (2006). The Grid Workloads Archive.
Iosup, A., Sonmez, O., Anoep, S., and Epema, D. (2008).
The performance of bags-oftasks in large-scale dis-
tributed systems. In Proceedings of the 17th Interna-
tional Symposium on High Performance Distributed
Computing, pages 97–108.
Lu, D., Sheng, H., and Dinda, P. (2004). Size-based
scheduling policies with inaccurate scheduling infor-
mation. In Proceedings of the 12th IEEE Interna-
tional Symposium on Modeling, Analysis, and Simu-
lation of Computer and Telecommunications Systems,
pages 31–38, USA. IEEE Computer Society.
Maheswaran, M., Ali, S., Siegel, H. J., Hensgen, D., and
Freund, R. F. (1999). Dynamic matching and schedul-
ing of a class of independent tasks onto heterogeneous
computing systems. In Proceedings of the 8th Hetero-
geneous Computing Workshop, page 30, USA. IEEE
Computer Society.
Rasooli, A. and Down, D. G. (2011). State independent
resource management for distributed grids. Techni-
cal Report CAS-11-01-DD, Department of Comput-
ing and Software, McMaster University, Canada.
Stolyar, A. L. and Tezcan, T. (2009). Control of systems
with flexible multi-server pools: a shadow routing ap-
proach. Bell Labs Technical Memo, revised.
Zhang, Y., Sun, W., and Inoguchi, Y. (2006). Predicting
running time of grid tasks based on cpu load predic-
tions. In Proceedings of the 7th IEEE/ACM Interna-
tional Conference on Grid Computing (Grid06), pages
286–292, USA. IEEE Computer Society.
ICSOFT 2011 - 6th International Conference on Software and Data Technologies
136
