
CLASSIFICATION OF HUMAN PHYSICAL ACTIVITIES
FROM ON-BODY ACCELEROMETERS
A Markov Modeling Approach
Andrea Mannini and Angelo Maria Sabatini
Arts Lab, Scuola Superiore Sant’Anna, Piazza dei Martiri della Libertà, Pisa, Italy
Keywords: Human activity classification, Statistical pattern recognition, Accelerometers, Hidden Markov Models,
Human robot interaction, Machine learning.
Abstract: Several applications demanding the development of small networks of on-body sensors, such as motion
sensors, are currently investigated. Accelerometers are a popular choice as motion sensors: the reason is
partly in their capability of extracting information that can be used to automatically infer the physical
activity the human subject is involved, beside their role in feeding estimators of biomechanical parameters.
Automatic classification of human physical activities is highly attractive for pervasive computing systems,
whereas contextual awareness may ease the human-machine interaction, and in biomedicine, whereas
wearable sensor systems are proposed for long-term monitoring of physiological and biomechanical
parameters. This paper is concerned with the machine learning algorithms needed to perform the
classification task. Hidden Markov Model (HMM) classifiers are studied by contrasting them with Gaussian
Mixture Model (GMM) classifiers. HMMs incorporate the statistical information available on movement
dynamics into the classification process, without discarding the time history of previous outcomes, as
GMMs do. In this work, rather than considering them as models for single motor activities, we apply
HMMs as models suitable for sequences of chained activities. An example of the benefits of the statistical
leverage by HMMs is illustrated and discussed by analyzing a dataset of accelerometer time series.
1 INTRODUCTION
Many technical applications could greatly benefit
from the availability of systems that are capable of
automatically classifying specific physical activities
of human beings. In this paper, either static posture,
e.g., standing, or dynamic motion, e.g., walking is
included in the term physical activity. The sort of
contextual awareness coming from this knowledge
(Brézillon, 1999) may help improving the
performance of healthcare monitoring devices or
promoting the development of advanced human-
machine interfaces. In fact, the precise activity
performed by the subject helps defining the context
in which further estimation can be conducted.
Consider, for instance, the problem of estimating the
metabolic energy expenditure of a human subject by
indirect methods (Meijer et al., 1991): these methods
are reported to incur severe estimation errors in the
absence of any information about the particular
functional task the subject is actually involved
(Meijer et al., 1991 and Bouten et al., 1997). In
robotics, several applications which demand some
capability by the robot controller of recognizing the
user’s intent are, for instance, in the field of
rehabilitation engineering, where smart walking
support systems are developed to assist motor-
impaired persons and elderly in their efforts to stand
and to walk (Yu et al., 2003 and Chuy et al., 2007),
or to detect gait instabilities of the user (Sabatini et
al., 2002 and Hirata et al., 2008) and minimize the
risk of fall (Hirata et al., 2008).
In principle, the wearable sensors needed to elicit
the contextual information would be characterized
by low power consumption, small size and weight,
adequate metrological specifications. Micro
electromechanical systems (MEMS) motion sensors
appear well matched to these requirements. The
methods investigated in this paper revolve around
the processing of acceleration signals acquired from
small nets of MEMS accelerometers affixed to
selected points of the human body.
201
Mannini A. and Sabatini A..
CLASSIFICATION OF HUMAN PHYSICAL ACTIVITIES FROM ON-BODY ACCELEROMETERS - A Markov Modeling Approach.
DOI: 10.5220/0003151102010208
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing (BIOSIGNALS-2011), pages 201-208
ISBN: 978-989-8425-35-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

A major part of this paper consists of illustrating
and discussing an approach to classification of
human physical activities, which is based on using
Hidden Markov Models (HMMs). In principle, this
approach aims at exploiting the information
available on the movement dynamics, namely the
capability of recognizing activities performed at the
current time is related to the classification outcomes
provided in the past by the classifier. Accordingly,
we talk about sequential classifiers, which differ
from the so-called single-frame classifiers, in the
sense that the latter ones are interested to single
activity primitives, in other words elementary
activities are studied in isolation from the history of
previously detected activities (Allen et al., 2006;
Bao & Intille, 2004; Begg & Kamruzzaman, 2005;
Foerster et al., 1999; Karantonis et al., 2006; Mathie
et al., 2004; Ravi, 2005 and Van Laerhoven &
Cakmakci, 2000).
Nowadays HMMs find applications in a large
number of recognition problems, including, but not
limited to, speech recognition (Rabiner, 1989), hand
gesture and sign language recognition (Liang &
Ouhyoung, 1995), controlling robotic tools by hand
gesture (Yang et al., 1997). Concerning the human
activity recognition, most studies on the application
of HMMs (Babu, 2002; Martìnez-Contreras, 2009)
are based on camera recordings, as shown by
Yamato (1992). These studies focus on the
validation of statistical models of each considered
activity. In a different way, our approach is based on
using lightweight wearable sensors and is oriented to
exploit HMMs at a higher level. In particular, their
use can be oriented towards modelling time relations
between elements of a sequence of activities. Few
applications of HMMs are reported in the literature
as for the problem of classifying human physical
activities from inertial sensors, probably because
HMMs are known potentially plagued by severe
difficulties of parameter estimation. In this paper we
propose a way of alleviating this difficulty by
adopting a supervised approach to classifier training.
This approach is feasible when the data available in
the training set are annotated.
2 MATERIALS AND METHODS
2.1 Datasets for Physical Activity
Classification
The present work is based on analyzing the dataset
of acceleration waveforms published by Bao &
Intille (2004), and disclosed to us by the authors.
Acceleration data, sampled at 76.25 Hz, are acquired
from five bi-axial accelerometers, located at the hip,
wrist, arm, ankle, and thigh. The original protocol is
based on testing 20 subjects, who are requested to
perform 20 activities. In this paper, we select the
seven activities shown in Figure 1, giving rise to a
reduced dataset, henceforth called seven-activity
dataset. These activities involve primarily the use of
the lower limbs; the rationale for their inclusion is
consistent with the most important item in our
current research agenda, namely the development of
a system for pedestrian navigation and gait
parameter estimation.
Since the research goal in Bao & Intille, (2004)
is exclusively to test single-frame classifiers, the
available data for each subject concern acceleration
time series that are known to correspond to each
activity primitive. Simulating a composite activity
by a single subject in our study (virtual experiment)
requires that one data frame is associated to each
state of the model. The associated data frame is
randomly sampled (with replacement) from the
maximum number N of frames available in the
reduced dataset for each primitive and subject (18 ≤
N ≤ 58). We assume that a sequence of elementary
activities, say, an activity at the motor sentence
level, can be modeled as a first-order Markov chain,
composed of a finite number Q of states S
i
; each
state accounts for an activity primitive, say, an
elementary activity at the motor word level. The
time evolution of a first-order Markov chain is
governed by the vector π of prior probabilities, and
the transition probability matrix (TPM) A. We opt
for a subject-specific training, i.e. a distinct classifier
is trained for each individual subject and we build a
Q-state model (π, A), so as to generate motor
sentences from the vocabulary of motor words
shown in Figure 1 (Q = 7).
Figure 1: Scheme of a sequential classification based on
HMMs.
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
202
A number S = 20 of virtual experiments is
synthesized, each of which composed of T = 300
data frames. A subset of P virtual experiments is
included in the training set. The procedure of
synthesizing virtual experiments in the manner
described above implies the existence of clear-cut
borders between data frames associated to different
primitives, without unknown transients between
consecutive classifiable frames. This problem is
managed by manual data cropping in creating the
original dataset (Bao & Intille, 2004). Of course,
real-life composite activities would be more
complex and fuzzy, especially as for the postural
transitions between different activities. In the
attempt to get a more realistic picture of the HMM-
based sequential classifier performance, data frames
from the original dataset not included in the reduced
dataset are randomly interspersed in the tested data
sequences generated by the OMM, in variable
proportions, from null to 1:3 (max.). The resulting
garbage is managed in our system by the spurious
rejection algorithm described in Section 2.5.
At the time being, the wearable system ActiNav
is moving its first steps in our lab for applications in
the field of pedestrian navigation and smart
estimation of biomechanical parameters and it is
therefore a welcome addition to our opportunities to
test the developed algorithm. ActiNav revolves
around an ARMadeus Board (APF27). It is equipped
with an ARM9 based Freescale processor, having
128 MB of RAM, 256 MB of FLASH memory, and
a 200K-gates Xilinx FPGA. A custom printed circuit
board allows arming the APF27 with a 12-bit
Successive Approximation Register ADC (AD7490,
Analog Devices, Inc.). This converter operates up to
1 MSPS; moreover, since it is endowed with 16
analog channels, up-to-five tri-axis analog
accelerometers or gyros can be integrated in
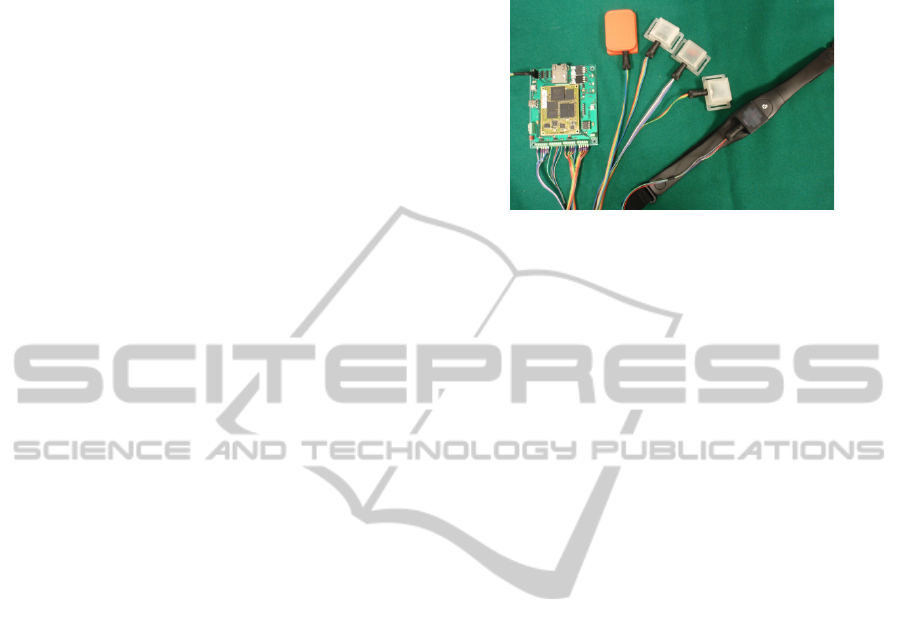
ActiNav. The system with the main board
(100×84×16 mm) and different sensors connected is
shown in Figure 2. For the aim of this work a single
tri-axis accelerometer (ADXL325, Analog Devices,
Inc.) with FS = ±5 g is fastened on the right thigh of
a single tested subject. The acquired dataset is
limited to 20 sit-stand-walk sequences. This low-
complexity dataset allows us in testing the proposed
methods on a real sequential dataset that includes a
postural transition and the incipient locomotion
situation. These aspects are particularly relevant for
our studies in robotic walking aids for rehabilitation.
Accelerometer data, acquired at a sampling
frequency of 250 Hz, are labeled using the activity
class reported by the experimenter (supervised
approach). Henceforth, we refer to this reduced-
complexity dataset as the sit-stand-walk dataset, so
as to differentiate it from the seven-activity dataset.
Figure 2: The ActiNav board is shown with several
sensors connected to its input ports
.
2.2 Data Processing: Feature Vectors
The automatic classification of acceleration data
requires a pre-processing phase in which feature
variables with high information content are extracted
from the raw sensor data. The feature vectors are
computed from acceleration samples within sliding
windows with finite and constant width, henceforth
called data frames.
According to the indications reported in previous
works (Bao & Intille, 2004; Ravi et al., 2005), the
following feature variables are selected in this paper:
DC component. This feature is helpful in
discriminating static postures; it is evaluated
by averaging the raw samples in each data
frame. One feature per data channel is
obtained.
Energy. This feature is helpful in assessing the
motor act strength. It is evaluated as the sum
of squared spectrogram coefficients within
each data frame. The first coefficient that
includes information about the DC component
is excluded from the sum. One feature per data
channel is obtained.
Entropy of spectrogram coefficients. This
feature is helpful in discriminating primitives
that differ in frequency domain complexity
(Bao & Intille, 2004). A kernel density
estimator is applied to spectrogram
coefficients for its determination. One feature
per data channel is obtained.
Correlation coefficients between pair of
accelerometer signals. They are obtained by
computing the dot product of pairs of frame
vectors, normalized to their length, and are
helpful in discriminating activities that involve
motions of several body parts. A total of 55
coefficients can be computed in our
application.
CLASSIFICATION OF HUMAN PHYSICAL ACTIVITIES FROM ON-BODY ACCELEROMETERS - A Markov
Modeling Approach
203

Before applying the classification algorithm, the
computed feature vectors are selected in order to
reduce the dimensionality of the problem. This is
required to limit the risk of bad parameter estimation
(Jain et al., 2000). In particular, we use the Pudil's
algorithm that is a sequential forward-backward
floating search (SFFS-SFBS) (Pudil, 1994); this
algorithm uses the Euclidean distances between each
pair of feature vectors of the same class in the
training set as a criterion for selection.
For the sit-stand-walk dataset we limit ourselves
to computing the DC components and the correlation
coefficients. Moreover, rather than applying the
Pudil’s feature selection approach, we prefer to
apply a feature extraction method (Jain et al., 2000).
Hence, a Principal Component Analysis (PCA) is
applied, in order to reduce the dimensionality from
nine (3 DC components + 6 Correlation coefficients)
to three.
2.3 Single-frame Classification
Although several single-frame classifiers can be
proposed, we consider here a particular technique
for single-frame classification, namely the Gaussian
Mixture Model (GMM) classifier. This approach is
reported by Allen et al. (2006) to achieve very
promising results. In particular, the authors discuss
the high adaptability of the classifier, a good feature
to analyze data from subjects that are not included in
the training set.
Of course, other methods for single-frame
classification of human physical activity can be
chosen, and they may also outperform GMMs
(Mannini & Sabatini, 2010). Here, the GMM
classifier is selected as the single-frame classifier of
reference, in particular for its resemblance to the
structure of a cHMM. As a matter of fact, the
probability density of emissions of each state in a
cHMM is modeled as a Gaussian mixture.
The GMM classifier first performs a parametric
estimation of class-conditional probability density
functions p(x|w
i
), which assign the probabilities of
the feature vector x given its membership to the class
w
i
. During the training phase of a GMM classifier,
class-conditional probabilities are estimated on the
feature-space as Gaussian mixtures. Each feature
vector x is then classified in the class yielding the
highest value of p(x|w
i
).
2.4 cHMM-based Classification
In modeling sequences of human activities as first-
order Markov chains we propose that the prior and
transition probabilities that are associated to the
model are empirically determined by observing the
subject behavior. If the TPM and the state at the
current time are known, then the most likely state
that will follow is probabilistically determined.
However, each activity primitive can only be
observed through a set of raw sensor signals (the
measured time series from on-body accelerometers,
in the present case). In other terms, the states are
hidden and only a second-level process is actually
observable (emissions). The statistical model
including the pair (π, A) and the emission process is
an HMM. We opt for a continuous emissions
approach (continuous emissions densities HMM, aka
cHMM, Rabiner, 1989). The most common
approach to the problem of modeling continuous
emissions is parametric. In particular we consider
mixtures of M multivariate normal distributions
N(μ
jm
,Σ
jm
) that are specified by assigning the mean
value vectors µ
jm
, the covariance matrices Σ
jm
, and
the mixing parameters matrix C. The mixture is used
to model the emissions from each state in the chain.
An excellent reference source for HMMs and
algorithms for their learning and testing in a
recognition problem is in Rabiner (1989).
For our particular problem we consider a Q-state
cHMM as represented in Figure 1 (Q = 7). One of
the main problems may be in the high number of
parameters to be identified. In fact, a Gaussian
cHMM trained in a d-dimensional feature space,
with Q primitives to be classified and M components
for each mixture requires the specification of the
following parameters:
π, prior probability vector, 1 × Q;
A, transition probability matrix Q × Q;
μ, set of mean value matrices, Q × M × d;
Σ, set of covariance matrices, Q × M × d × d;
C, set of mixing parameters, Q × M.
The approach to deal with the parameter
identification problem is to split the training phase
into two different steps: a first-level supervised
training phase is followed by a second-level training
phase, which is performed by running the Baum-
Welch algorithm (Rabiner, 1989). Indeed, the
particular problem we are facing with is typically
supervised. It is also known that an inaccurate
initialization of parameters could lead to suboptimal
results by using the Baum-Welch algorithm, due to
the presence of many local maxima in the
optimization surface (Rabiner, 1989). Accordingly,
the first level supervised training becomes the
proposed particular way for achieving a good
initialization of parameters entering the second
“traditional” phase.
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
204
In order to simplify the estimation process, the
parameter set is divided into two main groups,
namely transition parameters (π, A) and emission
parameters (μ, Σ, C). This separation allows us to
train separately two parameter sets with reduced
size, yielding a relevant reduction of the overall size
of the training set. Transition parameters can be
estimated through an OMM. In fact, under
supervised conditions, activity labels from training
set sequences, which in our model correspond to
hidden states, are actually known. Emission
parameters can be estimated by running a GMM
classifier. The training process at the second level
exploits the values of the parameters estimated
during the training process at the first level, as initial
values for running the Baum-Welch algorithm.
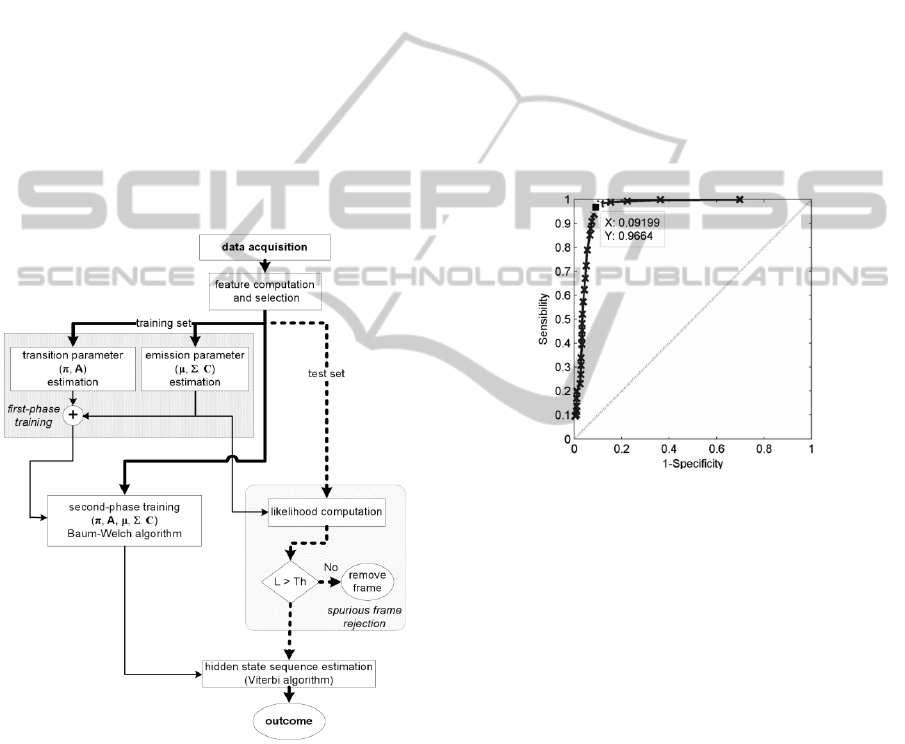
In Figure 3 a conceptual scheme of the whole
sequential classification algorithm is depicted: thin
lines refers to parameters, bold lines represent data
frames.
Figure 3: Block diagram of the developed cHMM-based
sequential classifier.
2.5 Spurious Data Rejection
The introduced classification strategy allows us to
define a criterion for automatic rejection of spurious
feature vectors. If a threshold-based detector is
applied to estimated class-conditional probabilities
p(x|w
i
), it is straightforward to reject those feature
vectors the classification of which is believed too
uncertain, without introducing an additional model
for unknown data. In fact the probability p(x|w
i
) in
the cHMM refers to the probability of the feature
vector x of being the emission of the model state w
i
.
If, for any feature vector, the probabilities relative to
each state are below the threshold, the feature vector
itself can be marked as spurious and removed,
without affecting the cHMM operation. Low values
of p(x|w
i
) are typical when unknown activities are
hidden in the data presented to the classifier, or
when too much uncertainty affects them.
The threshold value can be optimized upon
assessment of the ROC curves; in Figure 4, the
specificity-sensibility curve, averaged over the 20
subjects, is reported for the data in the seven-activity
dataset. The threshold is settled in our application by
retaining the value when the sensibility of rejection
is slightly greater than the specificity.
Figure 4: ROC curve obtained for different threshold
values.
3 RESULTS
3.1 The seven-activity Dataset
After applying the Pudil's feature selection algorithm
to data, the number of features is reduced from 85 to
17, namely 4 DC components of accelerations and
13 correlation coefficients are retained. The training
set for the single-frame classifier is composed of K
frames per class and per subject. According to the
results of some preliminary testing, K = 7 turns out
to be a convenient choice. Testing is performed
using the remaining N–K frames available for each
subject.
The number of Gaussian components of the
mixture is taken M = 1, either in the GMM or the
cHMM-based classifiers. Indeed the experimental
evidence is in strong support of the assumption of
unimodal data distributions. Algorithm testing up to
CLASSIFICATION OF HUMAN PHYSICAL ACTIVITIES FROM ON-BODY ACCELEROMETERS - A Markov
Modeling Approach
205
M = 5 indicates only marginal improvements over
the simpler choice M = 1 discussed in the following.
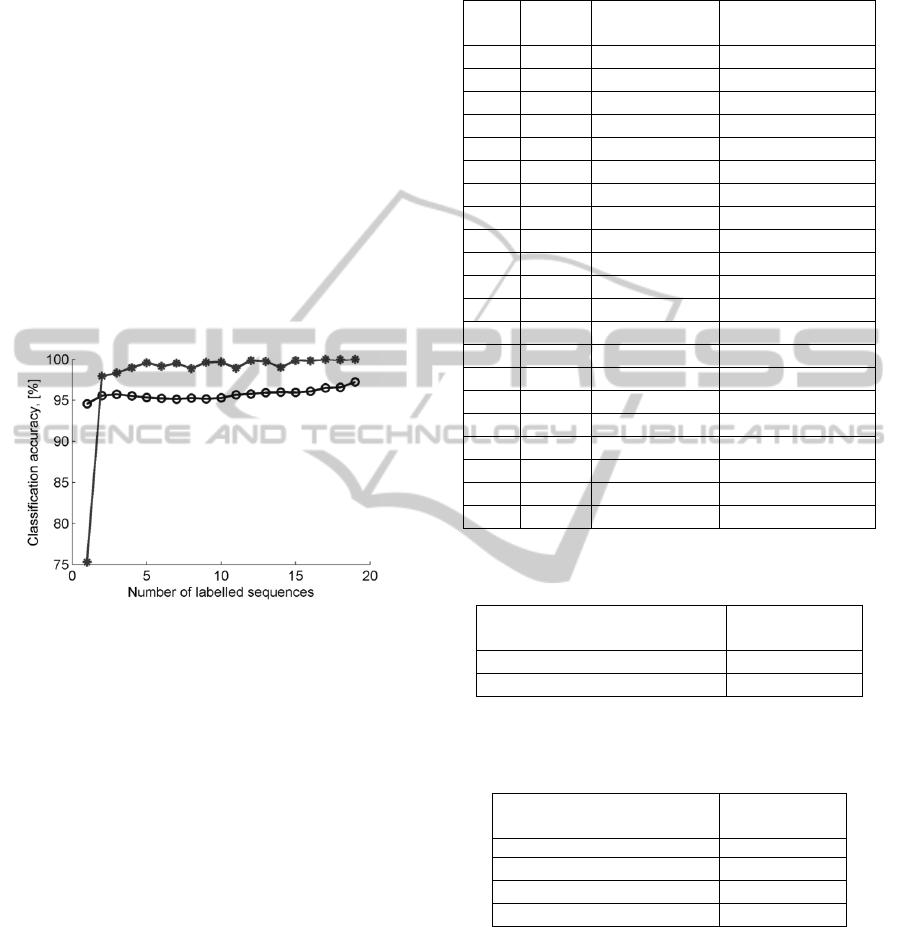
We consider the value K = 7 for the cHMM-based
classifier too. The effect of the number P of motor
sentences in the training set is then analyzed and
results are shown in Figure 5, either in the case that
the second-level training is performed or not,
yielding P = 5 as a reasonable value for sizing the
training set. A subject-specific training and test is
performed for both GMM and cHMM-based
classifiers. In Table 1 the classification accuracy is
reported for each tested subject.
As far as the algorithm for spurious data
rejection is concerned, the threshold is fixed so as to
achieve sensibility Se = 96.6% and specificity Sp =
90.8%. In Table 2 the classification accuracy in the
presence of spurious data and after their automatic
rejection is presented.
Figure 5: Classification accuracy vs. number of P motor
sentences in the training set. o: only first-level training is
applied; *: first-level training is followed by second-level
training.
3.2 The sit-stand-walk Dataset
This dataset is processed using the same sequential
classification methodology as for the seven-activity
dataset. However, the presence of a single subject
dataset requires a different validation method. A
leave-one-out approach is followed: 20 classifiers
are trained, and each time a single sequence is used
to validate the classifier. Classification results in
terms of recognition accuracy are reported in Table
3. As far as spurious data, there is no need to add
spurious data, as described before for the seven-
activity dataset. The spurious rejection algorithm is
now applied to tag data from the sit-stand-walk
dataset, whose reliability for classification is deemed
questionable. Of course, we expect to observe a
higher number of tagged data where activity
transitions take place. In Figure 6 the classifier
outcome and the spurious rejection effect are
reported.
Table 1: Recognition accuracies (percentage values) for
each subject and mean accuracy value over 20 subjects
(seven-activity dataset, before introducing spurious data).
Subject
GMM
cHMM
(First level only)
cHMM
(First and second level)
1 97.6 97.2 99.6
2 93.9 95.6 99.7
3 94.9 94.9 99.7
4 99.9 96.1 99.7
5 82.1 92.2 97.8
6 91.6 89.8 99.5
7 89.5 90.5 97.7
8 98.3 90.6 99.7
9 87.2 94.5 99.6
10 95.6 96.3 99.7
11 98.3 96.2 98.8
12 90.4 89.2 98.1
13 79.9 86.7 99.2
14 92.7 87.2 98.8
15 64.3 94.2 99.6
16 98.7 97.9 98.9
17 53.6 94.8 97.6
18 67.9 81.7 83.4
19 86.9 96.5 99.5
20 75.2 98.5 99.7
Mean 86.9 93.0 98.3
Table 2: Classification accuracy (mean percentage values)
in the presence of spurious data, seven-activity dataset.
Implementation
Classification
accuracy, [%]
Without rejection of spurious data
72.1
With rejection of spurious data
95.7
Table 3: Classification accuracy (mean percentage values)
after and before spurious data rejection, sit-stand-walk
dataset.
Classifier
Classification
accuracy (%)
GMM 89.7
cHMM (First level only)
86.4
cHMM (First and second level)
96.0
cHMM (With spuria rejection)
99.2
4 DISCUSSIONS AND
CONCLUSIONS
Referring to the seven-activity dataset, the Pudil’s
feature selection scheme individuates a subset of
features that simply consist of gross postural
information (DC components) and movement
coordination information (correlation coefficients).
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
206

Figure 6: Classification and spurious data rejection on a
sequence of the sit-stand-walk dataset.
Nonetheless, it is argued that energy and entropy
time-domain features would be highly valuable,
provided that we decide to investigate other
activities, e.g., those from the set studied in (Bao &
Intille, 2004) that are not considered in this paper.
Our decision to concentrate on a basic vocabulary of
activities is motivated by our ongoing work aimed at
developing a wearable sensor system for pedestrian
navigation and human locomotion rehabilitation.
The applicability of Markovian modeling to the
classification of human physical activities - the
subject of this paper - is demonstrated. In particular
we highlight the importance of exploiting the
statistical knowledge about the human motion
dynamics that can be “trapped” within the Markov
chain. The cHMM-based classifier, owing to the
exploitation of statistical information about the
activity dynamics it provides, systematically
outperforms the GMM classifier (the classification
accuracy, averaged across the pool of tested
subjects, raises from about 87% to 98%).
A subject-specific training is considered in this
work. Especially for the cHMM-based sequential
classifier indeed, this approach is more appropriate
than training a single net for a pool of subjects; this
is because of the high variability in how humans
perform a given physical activity.
The supervised training is pursued in this paper
with the idea to split the process of estimating the
parameters of the cHMM-based classifier into two
distinct levels. We can observe that considering only
the first-level training the accuracy of the cHMM-
based classifier performance goes down to about
93% from 98%, still superior to the performance of
the single-frame GMM classifier. Splitting the
training process in two distinct levels is helpful to
effectively cope with the size limitations of the
training set: P = 5 sequences lasting each just few
minutes are enough to yield a suitable training set in
the present application.
A final point is related to the proposed method
for managing spurious feature vectors. Most
published studies, including (Bao & Intille, 2004),
handle the problem of the fuzzy borders by manual
data cropping. Clearly this is neither useful nor
applicable if we look for a real-time system for
activity classification. In our approach, the whole
spurious rejection process is made automatic. When
up to one third of the whole feature vectors in the
data are spurious, the cHMM-based classifier
accuracy is limited to about 72% in the absence of
the proposed threshold-based detector. If the
threshold-based detector is actually implemented the
performance ramps up to about 96%.
Although being limited to three activities chained
in a fixed order, and lasting few seconds only, the
tests on the sit-stand-walk dataset show that the
proposed algorithm can be applied to data in which
transitions are not removed by data cropping. The
beneficial effect of the dynamic information of
HMMs respect to GMMs is confirmed and high
classification accuracy is obtained (> 95 %). This
capability encourages the application of the
proposed methods even for subjects that are affected
by pathologies. As it is shown in Figure 6, the
spurious rejection system is able to identify those
data that actually correspond to postural transitions,
whose classification would be troublesome. This
allows using the proposed methodology, without any
particular attention to how the dataset is labeled
during data acquisition.
In conclusion, a Markov modeling approach to
the design of a sequential human activity classifier
has been pursued. The requirements in terms of
dataset size are not prohibitive, owing to the
proposed subdivision of the training process into two
distinct levels. The supervised machine learning
algorithm also includes a very effective device for
rejecting spurious feature vectors, which turns out to
show high sensibility and specificity of detection.
Ongoing work will concern the extension of the
proposed algorithm in the ActiNav system for
applications in the field of pedestrian navigation,
human robot interaction and smart estimation of
biomechanical parameters.
ACKNOWLEDGEMENTS
The authors are indebted to Prof. Stephen S. Intille,
for allowing them to use his acceleration dataset for
the computer experiments in this paper.
CLASSIFICATION OF HUMAN PHYSICAL ACTIVITIES FROM ON-BODY ACCELEROMETERS - A Markov
Modeling Approach
207

REFERENCES
Allen, F. R., Ambikairajah, E., Lovell, N. H. & Celler, B.
G., 2006. Classification of a known sequence of
motions and postures from accelerometry data using
adapted gaussian mixture models. Physiol. Meas., 27,
935–951.
Babu, R. V., Anantharaman, B., Ramakrishnan, K. &
Srinivasan, S., 2002. Compressed domain action
classification using hmm. Pattern Recognit. Lett.,
23(10), 1203 – 1213.
Bao, L. & Intille, S. S., 2004. Activity recognition from
user-annotated acceleration data. In Ferscha, A. &
Mattern, F. Pervasive Computing, Springer, 301,1-17.
Bouten, C., Koekkoek, K., Verduin, M., Kodde, R. &
Janssen, J., 1997. A triaxial accelerometer and
portable data processing unit for the assessment of
daily physical activity. IEEE Trans. Biomed. Eng.,
44(3):136–147.
Brézillon, P., 1999. Context in problem solving: a survey.
Knowl. Eng. Rev., 14(1), 47–80.
Chuy, O., Hirata, Y., Wang, Z. D. & Kosuge, K., 2007. A
control approach based on passive behavior to enhance
user interaction. IEEE Trans. Rob., 23(5), 899–908.
Foerster, F., Smeja, M. & Fahrenberg, J., 1999. Detection
of posture and motion by accelerometry: a validation
study in ambulatory monitoring. Comput. Hum.
Behav., 15, 571 –583.
Hirata, Y., Komatsuda, S. & Kosuge, K., 2008. Fall
prevention control of passive intelligent walker based
on human model. IEEE Int.Conf. on Intell. Robots
Syst, 1222–1228.
Jain, A. K., Duin, R. P. W. & Mao, J., 2000. Statistical
pattern recognition: A review. IEEE Trans. Pattern
Anal. Mach. Intell., 22(1), 4–37.
Karantonis, D., Narayanan, M., Mathie, M., Lovell, N., &
Celler, B., 2006. Implementation of a real-time human
movement classifier using a triaxial accelerometer for
ambulatory monitoring. IEEE Trans. Informat.
Technol. Biomed., 10(1), 156–167.
Liang, R. & Ouhyoung, M., 1995. A real-time continuous
alphabetic sign language to speech conversion VR
system. Comput. Graph. Forum, 14(3), 67–76.
Mannini, A. & Sabatini, A. M., 2010. Machine learning
methods for classifying human physical activity from
on-body accelerometers. Sensors, 10(2), 1154–1175.
Martinez-Contreras, F., Orrite-Urunuela, C., Herrero-
Jaraba, E., Ragheb, H. & Velastin, S. A., 2009.
Recognizing human actions using silhouette-based
hmm. IEEE Conf. on Adv. Video Signal Based
Surv.,43–48.
Mathie, M. J., Celler, B. G., Lovell, N. H. & Coster, A. C.,
2004. Classification of basic daily movements using a
triaxial accelerometer. Med. Biol. Eng. Comput.,
42,679 – 687.
Meijer, G., Westerterp, K., Verhoeven, F., Koper, H. &
Ten Hoor, F., 1991. Methods to assess physical
activity with special reference to motion sensors and
accelerometers. IEEE Trans. Biomed. Eng., 38(3),
221–229.
Pudil, P., Novovicová, J. & Kittler, J., 1994. Floating
search methods in feature selection. Pattern Recogn.
Lett., 15(11), 1119–1125.
Rabiner, L. R., 1989. A tutorial on hidden markov models
and selected applications in speech recognition. Proc.
IEEE, 77(2), 257–286.
Ravi, N., Dandekar, N., Mysore, P. & Littman, M. L.,
2005. Activity recognition from accelerometer data.
American Association for Artificial Intelligence, 5,
1541–1546.
Sabatini, A., Genovese, V. & Pacchierotti, E., 2002. A
mobility aid for the support to walking and object
transportation of people with motor impairments.
IEEE Int.Conf. on Intell. Robots Syst, 2, 1349–1354.
Sabatini A. M., 2006, Inertial sensing in biomechanics: a
survey of computational techniques bridging motion
analysis and personal navigation.In Begg, R. &
Palaniswami, M., Computational Intelligence for
Movement Sciences: Neural Networks and Other
Emerging Techniques;Eds.; Idea Group Pubilishing:
Hershey, PA, USA, 70–100.
Van Laerhoven, K. & Cakmakci, O., 2000. What shall we
teach our pants? Proc. IEEE Int. Symposium on
Wearable Computers, 77.
Yamato J., Ohya J. & Ishii K., 1992, Recognizing human
action in time-sequential images using Hidden Markov
Models, Proc. Conf. Comp. Vision and Pattern Rec.,
379-385.
Yang, J., Xu, Y. & Chen, C., 1997. Human action learning
via hidden markov model. IEEE Trans. Syst. Man and
Cyb., Part A, 27(1), 34–44.
Yu, H., Spenko, M. & Dubowsky, S., 2003. An adaptive
shared control system for an intelligent mobility aid
for the elderly. Auton. Rob., 15(1), 53–66.
BIOSIGNALS 2011 - International Conference on Bio-inspired Systems and Signal Processing
208
