
ADAPTIVE STATE REPRESENTATIONS FOR MULTI-AGENT
REINFORCEMENT LEARNING
Yann-Micha
¨
el De Hauwere, Peter Vrancx and Ann Now
´
e
Computational Modeling Lab, Vrije Universiteit Brussel Pleinlaan 2, 1050 Brussels, Belgium
Keywords:
Multi-agent Reinforcement Learning.
Abstract:
When multiple agents act in the same environment, single-agent reinforcement learning (RL) techniques often
fail, as they do not take into account other agents. An agent using single agent RL generally does not have
sufficient information to obtain a good policy. However, multi-agent techniques that simply extend the state
space to include information on the other agents suffer from a large overhead, leading to very slow learning.
In this paper we describe a multi-level RL algorithm which acts independently whenever possible and learns
in which states it should enrich its state information with information about other agents. Such states, which
we call conflict states are detected using statistical information about expected payoffs in these states. We
demonstrate through experiments that our approach learns a good trade-off between learning in the single-
agent state space and learning in the multi-agent state space.
1 INTRODUCTION
Multi-agent systems (MAS) are a natural way of solv-
ing certain distributed problems such as task alloca-
tion, networking or mobile robotics such as for in-
stance robosoccer. Learning techniques and more
specifically reinforcement learning (RL) are a power-
ful tool to perform tasks in an unknown environment
(Sutton and Barto, 1998). However, learning algo-
rithms do not scale well from single agent to multi-
agent settings. A straightforward approach would be
to treat the MAS as a large Markov Decision Process
(MDP) using the combined states of all agents and
all possible combinations of actions as single actions.
This approach becomes untractable very quickly due
to the exponential nature in which the state-action
space increases with the number of agents. Using this
technique becomes even less attractive knowing that
in many MAS, agents only rarely interact with each
other. As agents converge, these interactions might
however occur more often if the policy the agents are
converging to causes them to attain the same state at
the same time. These situations usually occur in a
same small set of states.
These properties of certain MAS describe the
main intuition for our approach. We propose to learn
the set of system states in which agents have interac-
tions with each other and augment their state space
with a global view of the system in these situations.
As such, agents act most of the time as if they were
alone in the environment, learning in a compact state
space, but use a more global view of the system in
states where this is necessary. Hence our main fo-
cus here lies on problem settings where conflict sit-
uations can be solved in those states where the im-
mediate reward reflects the conflict. An application in
which agents can act independent most of the time but
should adapt if they experience influence from other
agents are automated guided vehicles (AGV). They
are most often used in industrial applications to move
materials around a manufacturing facility or a ware-
house. When many AGV are operating in the same
environment, some form of coordination is necessary
to avoid that AGV would for instance block each other
at the entrance of a corridor. As long as AGV are not
in each others neighbourhood however, they should
not take each other in consideration and can plan in-
dependently where to go. In our experiments we use
a simpler version of this problem in the form of grid-
worlds in which agents have to navigate to a goal.
These kind of MAS have received a lot of atten-
tion in the last couple of years. Various approaches
have been developed such as Utile Coordination (Kok
and Vlassis, 2004; Kok et al., 2005) which learns co-
ordination graphs to model the interdependencies be-
tween agents or learning when coordination is neces-
181
De Hauwere Y., Vrancx P. and Nowé A..
ADAPTIVE STATE REPRESENTATIONS FOR MULTI-AGENT REINFORCEMENT LEARNING.
DOI: 10.5220/0003145701810189
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 181-189
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

sary (Melo and Veloso, 2009). In Section 2 we pro-
vide an overview of the existing techniques and de-
scribe how our approach is different. We introduce
our approach of learning in which states the agents
must take each other into account in Section 3 and il-
lustrate our approach in various gridworlds of differ-
ent complexity in Section 4. We conclude this paper
with some final remarks in Section 5.
2 CONTEXT AND BACKGROUND
Markov Decision Processes are a theoretical frame-
work for decision making under uncertainty on which
reinforcement learning is based. For multi-agent set-
tings Markov Games can be used to model the system.
We will begin by explaining these frameworks before
giving an overview of related work.
2.1 MDPs and Markov Games
An MDP can be described as follows. Let S =
{s
1
, . . . , s
N
} be the state space of a finite Markov chain
{x
l
}
l≥0
and let A = {a
1
, . . . , a
r
} be the action set avail-
able to the agent. Each combination of starting state
s
i
, action choice a
i
∈ A and next state s
j
has an associ-
ated transition probability T (s
i
, a
i
, s
j
) and immediate
reward R(s
i
, a
i
). The goal is to learn a policy π, which
maps an action to each state so that the expected dis-
counted reward J
π
is maximised:
J
π
≡ E
"
∞
∑
t=0
γ
t
R(s(t),π(s(t)))
#
(1)
where γ ∈ [0, 1) is the discount factor and expectations
are taken over stochastic rewards and transitions.
In a Markov Game, actions are the joint result
of multiple agents choosing an action individually.
A
k
= {a
1
k
, . . . , a
r
k
} is now the action set available to
agent k, with k : 1 . . . n, n being the total number of
agents present in the system. Transition probabil-
ities T (s
i
, a
i
, s
j
) now depend on a starting state s
i
,
ending state s
j
and a joint action from state s
i
, i.e.
a
i
= (a
i
1
, . . . , a
i
n
) with a
i
k
∈ A
k
. The reward function
R
k
(s
i
, a
i
) is now individual to each agent k, meaning
that agents can receive different rewards for the same
state transition.
In a special case of the general Markov game
framework, the so-called team games or multi-
agent MDPs (MMDPs) optimal policies still exist
(Boutilier, 1996; Claus and Boutilier, 1998). In this
case, all agents share the same reward function and
the Markov game is purely cooperative. This spe-
cialisation allows us to define the optimal policy as
the joint agent policy, which maximises the payoff of
all agents. In the non-cooperative case typically one
tries to learn an equilibrium between agent policies
(Hu and Wellman, 2003; Greenwald and Hall, 2003;
Vrancx, 2010). These systems need each agent to cal-
culate equilibria between possible joint actions in ev-
ery state and as such assume that each agent retains
estimates over all joint actions in all states.
2.2 Q-Learning
Reinforcement Learning (RL) is an approach to solv-
ing such an MDP. Q-Learning is the most well-known
RL algorithm. This algorithm uses Q-values which
explicitly store the expected discounted reward for ev-
ery state-action pair:
Q
∗
(s, a) = R(s, a) + γ
∑
s
0
T (s, a, s
0
)max
a
0
Q(s
0
, a
0
) (2)
So in order to find the optimal policy, one can learn
this Q-function and subsequently use greedy action
selection over these values in every state. Watkins
described an algorithm to iteratively approximate Q
∗
.
In the Q-learning algorithm (Watkins, 1989), a table
consisting of state-action pairs is stored. Each entry
contains the value for
ˆ
Q(s, a) which is the learner’s
current hypothesis about the actual value of Q(s, a).
The
ˆ
Q-values are updated according to following up-
date rule:
ˆ
Q(s, a) ←
ˆ
Q(s, a) +α
t
[R(s, a) +
γmax
a
0
ˆ
Q(s
0
, a
0
) −
ˆ
Q(s, a)] (3)
where α
t
is the learning rate at time step t.
Provided that all state-action pairs are visited in-
finitely often and an appropriate learning rate is cho-
sen, the estimates
ˆ
Q will converge to the optimal val-
ues Q
∗
(Tsitsiklis, 1994).
2.3 Related Work
A lot of attention has been given to local interaction
problems and selective coordination among agents in
the RL-community the last years. We present a brief
overview of the most relevant work done in this area
and describe in which way our work differentiates
from these approaches.
In (Kok and Vlassis, 2004) Kok et al. describe an
approach where agents know in which states coordi-
nation is beneficial. As such they are learning in a
sparse joint state-action space. In later work, they in-
troduced Utile Coordination. An algorithm in which
they used coordination graphs to describe the depen-
dencies between agents in states where coordination
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
182

improved the performance of the system (Kok et al.,
2005). These coordination graphs were learned by
maintaining statistical information about the obtained
rewards conditioned on the states and actions of all the
other agents. As such, the approach always uses com-
plete information about the joint state-action space in
which the agents are learning (i.e. agents are fully ob-
servable). This approach however is limited to fully
cooperative MAS. The technique we introduce in this
paper will learn when it is necessary to observe the
joint state space. Whereas Utile Coordination will
learn to coordinate actions in a certain set of states
in order to improve the global common payoff of the
system, our approach will learn in which states other
agents have to be taken into account while selecting
an action without conditioning this on the entire joint
state-action space.
Spaan and Melo approached the problem of co-
ordination from a different angle (Spaan and Melo,
2008). They introduced a new model for multi-agent
decision making under uncertainty called interaction-
driven Markov games (IDMG). This model contains
a set of interaction states which lists all the states in
which coordination should occur. In later work, Melo
and Veloso (Melo and Veloso, 2009) introduced an al-
gorithm where agents learn in which states they need
to condition their actions on other agents. As such,
their approach can be seen as a way of solving an
IDMG where the states in which coordination is nec-
essary is not specified beforehand. To achieve this
they augment the action space of each agent with a
pseudo-coordination action. This action will perform
an active perception step. This could for instance be
a broadcast to the agents to divulge their location or
using a camera or sensors to detect the location of the
other agents. This active perception step will decide
whether coordination is necessary or if it is safe to
ignore the other agents. Since the penalty of misco-
ordination is bigger than the cost of using the active
perception, the agents learn to take this action in the
interaction states of the underlying IDMG. This ap-
proach solves the coordination problem by deferring
it to the active perception mechanism. The pseudo
code for this technique is given in Algorithm 1. We
will refer to this technique further in this paper as LoC
(Learning of Coordination).
LoC uses an active perception step to determine
whether coordination with another agent is necessary
in this state. This perception step can consist of the
use of a camera, sensory data, or communication to
reveal the local state information of another agent.
The technique we introduce will learn independently
in which states coordination is necessary, without re-
lying on active perception to decide whether coordi-
nation would be beneficial.
Algorithm 1: Learning of Coordination (LoC).
1: Initialise Q
∗
k
and Q
C
k
;
2: Set t = 0;
3: while forever do
4: Choose A
k
(t) using π
e
5: if A
k
(t) = COORDINATE then
6: if ActivePercept = TRUE then
7:
ˆ
A
k
(t) = π
g
(Q
C
k
, X(t));
8: else
9:
ˆ
A
k
(t) = π
g
(Q
∗
k
, X
k
(t));
10: end if
11: Sample R
k
(t) and X
k
(t +1);
12: if ActivePercept = TRUE then
13: QLUpdate(Q
C
k
;X(t),
ˆ
A
k
(t), R
k
(t), X
k
(t +
1), Q
∗
k
);
14: end if
15: else
16: Sample R
k
(t) and X
k
(t +1);
17: end if
18: QLUpdate(Q
∗
k
;X(t),
ˆ
A
k
(t), R
k
(t), X
k
(t +
1), Q
∗
k
);
19: t = t + 1
20: end while
where QLUpdate(Q;x; a; r;y;Q
0
) is equivalent to
Q(x, a) = (1 − α)Q(x, a) + α(r + γ max
b
Q
0
(y, b)) (4)
The main intuition behind our approach is simi-
lar to the techniques explained above. However, we
only want to observe the full joint state information
in those local states where this is necessary, not al-
ways observe this information and condition our ac-
tions on it as in the work of Kok & Vlassis (Kok et al.,
2005). Also contrary to the work of Melo & Veloso
(Melo and Veloso, 2009), our algorithm intends to
learn without external help or information, such as
an active percetion function, in which states coordi-
nation is necessary. Our main goal is thus to learn in
which states observing the global state information is
necessary.
3 CQ-LEARNING
In previous work a similar approach was described,
which assumes that agents are aware of the ex-
pected payoffs for selecting actions beforehand (De
Hauwere et al., 2010). This can either be because
they are aware of the reward function or because they
were initially acting alone in the environment. In this
version of Coordinated Q-learning (CQ-learning)
ADAPTIVE STATE REPRESENTATIONS FOR MULTI-AGENT REINFORCEMENT LEARNING
183

this requirement is no longer needed. We assume that
in the initial stage of the learning process, agents are
still acting quite random to explore the environment
and rarely encouter other agents. In the experiments
we show that this assumption is fair. As such, we
can also assume that the rewards an agent receives
in this initial learning stage are comparable to the
rewards it would receive if it were acting alone in the
environment. This assumption can then be exploited
to detect conflict situations that might occur in a later
stage of the learning process, when agents start to
converge to a policy.
Initially agents act in an individual state space,
in which they can only observe their own local state
information. The agents maintain a list of rewards
for every action in a state is maintained. The first N
rewards received for a certain action a in a local state
s are stored forever in W 1. Every reward received for
this particular pair (s, a) after the first N samples, is
added to a sliding window W 2 each time replacing
the oldest sample in a first-in-first-out way. This
concept is shown graphically in Figure 1.
Detecting Conflict Situations: At every timestep
the agent will perform a statistical test between its
last received rewards and the rewards it received
during the initial stage of the learning process in
order to detect a discrepancy between the received
rewards. We explain in depth how this statistical test
works in one of the following paragraphs. If such a
discrepancy is detected, the agent will expand its own
local state information with global information about
the states of the other agents.
Selecting Actions: If an agent selects an action it
will check if its current local state is a state in which
previously a discrepancy has been detected. If so, it
will observe the global state information to determine
if the state information of the other agents is the
same as when the conflict was detected. If this is
the case, it will condition its actions on this global
state information, otherwise it can act independently
using only its own local state information. If its local
state information has never caused a discrepancy
it can also act without taking the other agents into
consideration.
Updates: We distinguish two cases for updating the
Q-values:
• An agent is in a state in which it used the global
state information to select an action. In this situa-
tion the following update rule is used:
Q
j
k
( js, a
k
) ← (1 − α
t
)Q
j
k
( js, a
k
)
+α
t
[r( js, a
k
) + γmax
a
0
k
Q
k
(s
0
, a
0
k
)]
Algorithm 2: CQ-Learning algorithm for agent k.
1: Initialise Q
k
and Q
j
k
to 0;
2: while forever do
3: js ← All stored combinations of local state in-
formation of Agent k with the state information
of another agent i ([k, 1], . . . , [k, i] with i 6= k);
4: if ∀ Agents k, state s
k
of Agent k is a safe state
then
5: Select a
k
for Agent k from Q
k
;
6: Lower the confidence values ∀ js in which
s
k
occurs;
7: else
8: Select a
k
for Agent k from Q
j
k
;
9: Increase the confidence value for j;
10: end if
11: ∀ Agents A
k
, add hs
k
, a
k
, r
k
i to W 1 if |W 1| < N
else add it to W 2;
12: if t-test rejects hypothesis that W 2 and W 1
come from the same distribution then
13: if t-test fails to reject hypothesis that r
k
is
smaller than the mean of W 2 then
14: add js to Q
j
k
and store js;
15: end if
16: end if
17: if s
k
is safe for Agent k then
18: Update Q
k
(s) ← (1 − α
t
)Q
k
(s) +
α
t
[r(s, a
k
) +γ max
a
Q(s
0
k
, a)];
19: else
20: Update Q
j
k
( js) ← (1 − α
t
)Q
j
k
( js) +
α
t
[r( js, a
k
) +γ max
a
Q(s
0
k
, a)];
21: end if
22: end while
where Q
k
stands for the Q-table containing the lo-
cal states, and Q
j
k
contains the joint states using
global information ( js). Note that this second Q-
table is initially empty. The Q-values of the lo-
cal states of an agent are used to bootstrap the
Q-values of the states that were augmented with
global state information.
• An agent is in a state in which it selected an ac-
tion using only its local state information. In this
case the Q-learning rule of Equation 3 is used with
only local state information, so the
ˆ
Q-values of the
formula are the Q
k
-values used for agent k.
We do not consider the case where we use the Q-table
with joint states to bootstrap in our update scheme
since at timestep t an agent can not know that it will
be in a state where coordination will be necessary at
timestep t + 1.
Statistical Test: The statistical test used in this
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
184
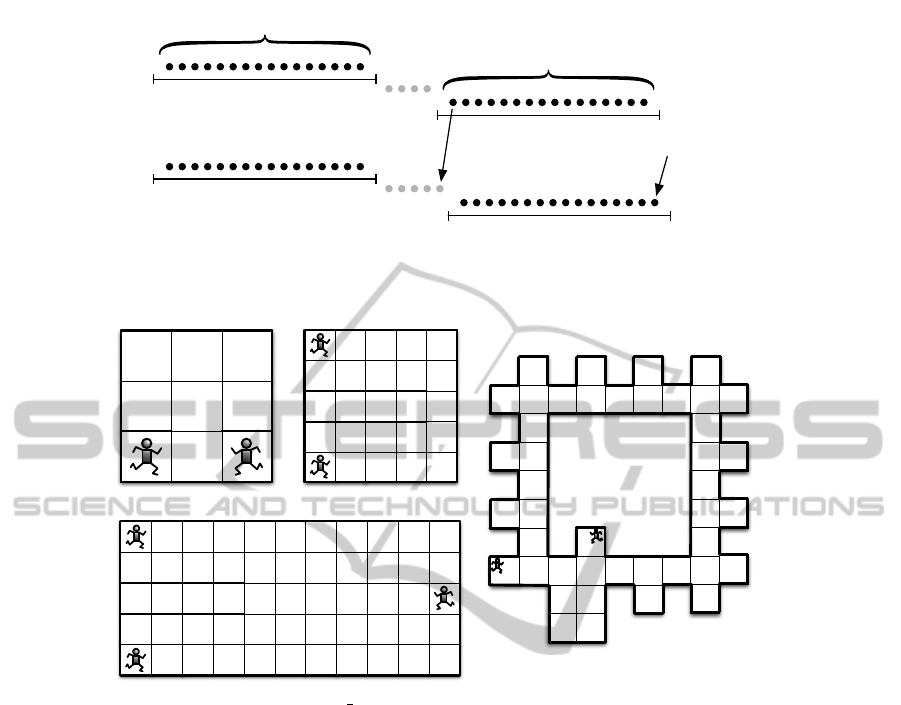
W1
W1
W2
W2
new reward
N samples
N samples
Figure 1: Sliding window principle of CQ-Learning. W 1 is fixed, W 2 contains the last N received rewards for a certain
state-action pair (s, a).
G
G
G1
G2
1
2
(a) Grid Game 2 (b) TunnelToGoal
G
(d) ISR
(c) TunnelToGoal 3
Figure 2: Gridworld environments used in the experiments. G indicates the goal. The agents are positioned in their initial
location.
algorithm is a Student t-test. This test can determine
whether the means of two normally distributed
populations of samples are equal or if the mean of a
population is equal to a certain value. By substracting
the samples of both populations and testing whether
the mean is zero, we can determine if the samples
from one population are significantly smaller than the
samples from the other population. At every timestep
such an independent two sample Student t-test is per-
formed for the current state-action pair of the agent to
determine whether the hypothesis that the currently
received rewards (W 2) come from a distribution with
the same or a higher mean than the rewards of W 1
can be rejected. If this is the case, i.e. our agent
is observing significantly different (lower) rewards
than in the initial learning phase, the algorithm will
perform a one sample Student t-test to determine if
the last received reward is smaller than the mean
from W 2. If this is the case, we can conclude that our
last action resulted in negative reward, due to a lack
of coordination with other agents. The algorithm will
then observe the global state information, augment its
own local state information with information about
the other agents, and mark this state as a state in
which coordination is necessary.
For every state which requires coordination
a confidence value is maintained wich gives an
indication of how often this joint state is observed.
If this confidence value drops below a certain value,
this state is removed from the joint state list and
agents will no longer use global state information in
this state and act independent again. The algorithm is
formally described in Algorithm 2.
4 EXPERIMENTAL RESULTS
The testbed for our algorithms is a set of gridworld
games with varying difficulty in terms of size com-
ADAPTIVE STATE REPRESENTATIONS FOR MULTI-AGENT REINFORCEMENT LEARNING
185
0 500 1000 1500 2000
0 1 2 3 4 5
Epsiodes
# collisions
Indep
JS
JSA
LoC
CQ−Learning
0 500 1000 1500 2000
0 1 2 3 4 5
Epsiodes
# collisions
Indep
JS
JSA
LoC
CQ−Learning
(a) Grid Game 2 (b) TunnelToGoal
0 500 1000 1500 2000
0 5 10 15 20
Epsiodes
# collisions
Indep
JS
JSA
LoC
CQ−Learning
0 500 1000 1500 2000
0 1 2 3 4 5
Epsiodes
# collisions
Indep
JS
JSA
LoC
CQ−Learning
(c) TunnelToGoal 3 (d) ISR
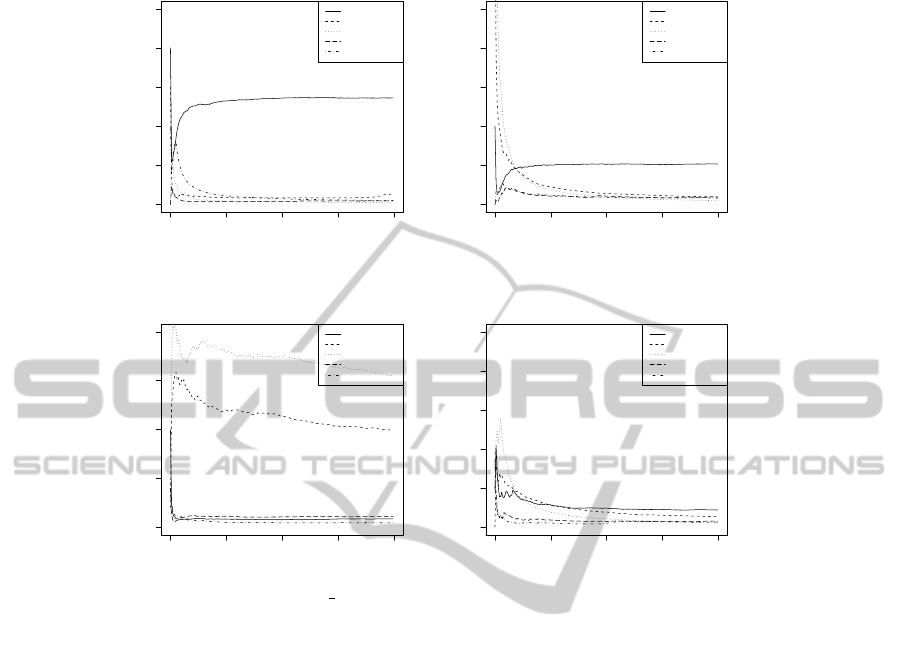
Figure 3: Number of collisions that occured in the different environments.
plexity and number of possible encounters with other
agents. The action set available to the agents is
hNORT H, EAST, SOUT H,W EST i, where each ac-
tion moves the agent once cell up, right, down or
left, respectively. If an agent chooses an action that
would result in hitting the wall, a penalty is given
and the agent remains in the same location. We com-
pared our algorithms to independent Q-learners (In-
dep) that learned without any information about the
presence of other agents in the environment, joint-
state learners (JS), which received the joint location
of the agents as state information but chose their
actions independently and joint-state-action learners
(JSA) which also received a joint location as input,
but selected a joint action (a so-called superagent).
Because this approach was developed for pure co-
operative MAS we gave the reward for reaching the
goal state only when all the agents reached their goal
states. As soon as an agent reached its goal state it
could however not leave this state anymore. As such,
we could apply joint-state-action learners even though
most of our environments the agents have a different
reward function. Finally, we also tested against the al-
gorithm described in (Melo and Veloso, 2009) (abbre-
viated in the figures as LoC, which stands for Learn-
ing of Coordination).
The environments we used are depicted in Figure
2. Environment (a) originates from (Greenwald and
Hall, 2003) and environment (d) is an adaptation of
the game used by Melo & Veloso (Melo and Veloso,
2009). However, in our game collisions are not lim-
ited to a small predetermined set, but can occur in ev-
ery location of the gridworld. The initial locations of
the agents, as well as the goal state(s) are shown.
Environment (a) was chosen because the only
good action in the initial positions would immediately
result in a collision with another agent.
All experiments were run for 10.000 episodes (an
episode was completed when all agents were in the
goal state) using a learning rate of 0.1. Exploration
was regulated using a fixed ε-greedy policy with ε =
0.1. If agents collided they remained in the same loca-
tion and received a penalty for colliding. On all other
occasions, transitions and rewards were determinis-
tic. For CQ-learning the sliding windows W 1 and W 2
contained 60 samples. The results described in the re-
mainder of this paragraph are the averages taken over
10 independent runs. For LoC we implemented the
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
186

active perception function as follows:
• return TRUE if another agent is less than 2 loca-
tions away (i.e. agents could collide in the current
timestep);
• return FALSE otherwise.
In related work was demonstrated how generalized
learning automata were capable of learning an area
around an agent where other agents had to be ob-
served (De Hauwere et al., 2009). We used the re-
sults of this study for the implementation of the active
perception step as this gives the same results as using
a predefined list of states in which coordination was
necessary for the active perception step, as was done
in the paper by Melo & Veloso
Figure 3 shows the average number of collisions
that occured for the different environments using the
different algorithms. We see that independent learn-
ers perform bad throughout all environments, except
for TunnelToGoal 3 (Environment (c)). This can be
explained by the size of the state space in that environ-
ment. Since our exploration strategy is fixed, agents
might make a mistake before reaching the entrance of
the tunnel and as such avoid collisions (by luck). In
this environment both joint-state learners and joint-
state action learners perform quite bad. This is also
due to the size of the state space. The number of
states these agents have to observe is 3025. Joint-
state-action learners then have to choose between 16
possible actions. These algorithms still haven’t learnt
a good policy after 2000 episodes. We see through-
out all environments that CQ-Learning finds collision
free policies, and finds these faster than any other al-
gorithm we compared with.
Two of the five algorithms used in the experiments
search for states in which observing the other agent
is necessary: CQ-learning and LoC. In Figure 4 we
show the number of times these algorithms decide to
observe the other agent per episode. For CQ-learning
this is the number of times an agent is in a state in
which it uses global state information to select an ac-
tion. For LoC this is the number of times the CO-
ORDINATE action is chosen (which triggers an ac-
tive perception step). We see that in the TunnelTo-
Goal 3 environment LoC uses a lot of coordinate ac-
tions in the beginning, as this action has initially an
equally high chance of getting selected as the other
actions. Due to the size of the environment it takes a
long time for this algorithm to choose the best action.
CQ-learning can be seen in a bottom-up way, which
initially never plays joint, and then expands its state
space. If the agents can solve the coordination prob-
lem independently, as can be seen in Figure 4(d), they
never use global state information to learn a solution.
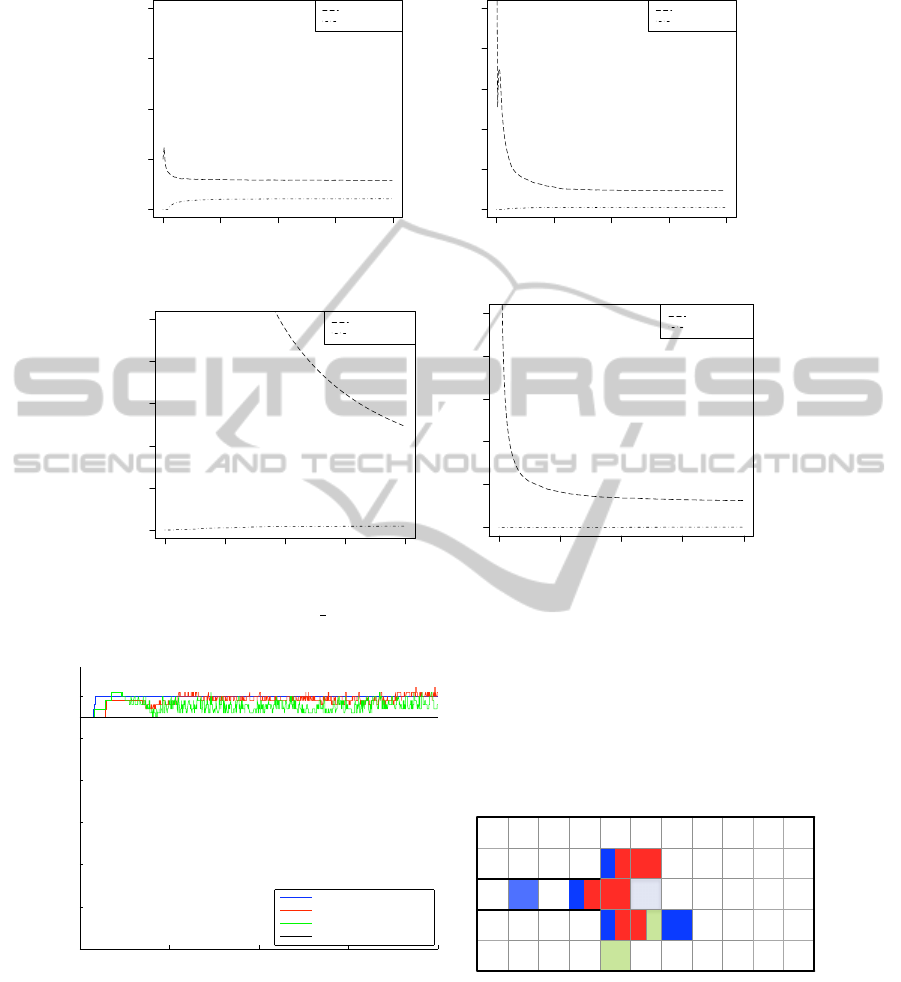
In Figure 5(a) we show the evolution of the size
of the state space when using CQ-learning in the Tun-
nelToGoal 3 environment. We have also plotted the
line which indicates the size of the state space in
which independent Q-learners are learning. For joint-
state and joint-state-action learners this line would be
constant at 3025. The variation in this line can be
explained by the fixed exploration strategy which is
used. This causes agents to deviate from their pol-
icy sometimes which causes new states in which col-
lisions occur to be detected. These states however are
removed pretty quickly again thanks to the confidence
level. These states are only occasionally visited and
the other agents are only rarely at the same location
as when the collision state was detected, so the confi-
dence level of these states decreases rapidly. In Fig-
ure 5(b) we show in which locations the agents will
observe other locations in order to avoid collisions.
We used the same color codes as in Figure 5(a). The
alpha level of the colors indicate the confidence each
agent has in that particular joint state. The agents
have correctly learned to observe other agents around
the entrance of the tunnel, where collisions are most
likely, and play independent using their local state in-
formation in all other locations.
5 CONCLUSIONS
This paper described an improved version of CQ-
Learning. This algorithm is capable of adapting
its state space to incorporate knowledge about other
agents, in those states where acting independent does
not suffice to reach a good policy. As such this
techniques takes the midground between acting com-
pletely independentlocal state space and acting in a
complete joint-state space. This is done by means of
statistical tests which will indicate whether a richer
state representation is needed for a specific state. In
these states the state information the agent uses is
augmented with global information about the other
agents. By means of a confidence value that indi-
cates to what degree coordination is necessary for a
given state, it is possible that states are reduced again
to only containing local state information. We have
shown through experiments that our algorithm finds
collision free policies in gridworlds of various size
and difficulty and illustrated the set of states in which
the agents use global state information. We compared
our technique to commonly accepted RL-techniques
as well as to state-of-the-art algorithms in the field
of sparse interactions and illustrated that CQ-learning
outperformed the other approaches.
A possible avenue for future research is to detect
ADAPTIVE STATE REPRESENTATIONS FOR MULTI-AGENT REINFORCEMENT LEARNING
187
0 500 1000 1500 2000
0 5 10 15 20
Epsiodes
# joint plays
LoC
CQ−Learning
0 500 1000 1500 2000
0 10 20 30 40 50
Epsiodes
# joint plays
LoC
CQ−Learning
(a) Grid Game 2 (b) TunnelToGoal
0 500 1000 1500 2000
0 100 200 300 400 500
Epsiodes
# joint plays
LoC
CQ−Learning
0 500 1000 1500 2000
0 10 20 30 40 50
Epsiodes
# joint plays
LoC
CQ−Learning
(c) TunnelToGoal 35 (d) ISR
Figure 4: Number of joint plays for CQ-Learning and LoC.
0 500 1000 1500 2000
0
10
20
30
40
50
60
Episodes
#States
Agent 1
Agent 2
Agent 3
Independent Q−Learning
G
(a) Size of the state space (b) Global states used
Figure 5: Evolution of the size of the state space in which CQ-learning is learning (a) and graphical representation of states
in which global state information is used (b).
in which states coordination is necessary, if the neg-
ative influence of an interaction is only detected in a
further stage. CQ-Learning expects that a coordina-
tion problem occurs in the state where the immediate
reward changes, but in reality it is possible that agents
must coordinate several timesteps before a negative
reward is given. An example of such a situation is
related to our TunnelToGoal environment where the
reward given to the agents might be dependent on the
order in which they enter the tunnel. One possible ap-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
188

proach to solve this would be to perform the statistical
test of CQ-Learning on the Q-values instead of on the
immediate rewards and as such backtrack the problem
to the original conflict state.
REFERENCES
Boutilier, C. (1996). Planning, learning and coordination in
multiagent decision processes. In Proceedings of the
6th Conference on Theoretical Aspects of Rationality
and Knowledge, pages 195–210, Renesse, Holland.
Claus, C. and Boutilier, C. (1998). The dynamics of re-
inforcement learning in cooperative multiagent sys-
tems. In Proceedings of the Fifteenth National Confer-
ence on Artificial Intelligence, pages 746–752. AAAI
Press.
De Hauwere, Y., Vrancx, P., and Now
´
e, A. (2009). Multi-
layer learning and knowledge transfer in mas. In
Proceedings of the 7th European Workshop on Multi-
Agent Systems.
De Hauwere, Y., Vrancx, P., and Now
´
e, A. (2010). Learn-
ing multi-agent state space representations. In Pro-
ceedings of the 9th International Conference on Au-
tonomous Agents and Multi-Agent Systems.
Greenwald, A. and Hall, K. (2003). Correlated-q learning.
In AAAI Spring Symposium, pages 242–249. AAAI
Press.
Hu, J. and Wellman, M. (2003). Nash q-learning for
general-sum stochastic games. Journal of Machine
Learning Research, 4:1039–1069.
Kok, J., ’t Hoen, P., Bakker, B., and Vlassis, N.
(2005). Utile coordination: Learning interdependen-
cies among cooperative agents. In Proceedings of the
IEEE Symposium on Computational Intelligence and
Games (CIG05), pages 29–36.
Kok, J. and Vlassis, N. (2004). Sparse cooperative q-
learning. In Proceedings of the 21st international con-
ference on Machine learning. ACM New York, NY,
USA.
Melo, F. and Veloso, M. (2009). Learning of coordination:
Exploiting sparse interactions in multiagent systems.
In Proceedings of the 8th International Conference on
Autonomous Agents and Multi-Agent Systems.
Spaan, M. and Melo, F. (2008). Interaction-driven markov
games for decentralized multiagent planning under
uncertainty. In Padgham, Parkes, M
¨
uller, and Parsons,
editors, Proceedings of the 7th International Confer-
ence on Autonomous Agents and Multiagent Systems,
pages 525–532.
Sutton, R. and Barto, A. (1998). Reinforcement Learning:
An Introduction. MIT Press.
Tsitsiklis, J. (1994). Asynchronous stochastic approxima-
tion and q-learning. Journal of Machine Learning,
16(3):185–202.
Vrancx, P. (2010). Decentralised Reinforcement Learning
in Markov games. PhD thesis, Vrije Universiteit Brus-
sel.
Watkins, C. (1989). Learning from Delayed Rewards. PhD
thesis, University of Cambridge.
ADAPTIVE STATE REPRESENTATIONS FOR MULTI-AGENT REINFORCEMENT LEARNING
189
