
COOPERATIVE APPROACH TO SELF-MANAGED VANETS
J. Molina-Gil, C. Caballero-Gil and P. Caballero-Gil
Department of Statistics, Operations Research and Computing, University of La Laguna
38271 La Laguna, Tenerife, Spain
Keywords: Self-management, VANET, Cooperation, Security.
Abstract: Vehicular networks are becoming more and more important in our society because of the great benefits that
can be obtained from them. Most research contributions propose specific mechanisms where the presence of
a Certification Authority is necessary, which implies a centralized system in charge of certification and
revocation services. In our work we propose a more realistic view of what will be the beginning of these
networks, where privacy and integrity are required and where misbehaving or faulty nodes have to be
detected and prevented from disrupting the network operation in a self-organized way.
1 INTRODUCTION
A Vehicular Ad-hoc NETwork (VANET) is a
special type of ad-hoc network used to provide
communications between On-Board Units (OBUs)
in nearby vehicles, and between OBUs in vehicles
and Road-Side Units (RSUs), which are fixed
equipment located on the road (
Yousefi, Mousavi, and
Fathy, 2006). Many ideas have been proposed for
vehicular networking to avoid or reduce traffic jams.
However, none of them have been implemented in
the real world till now.
The cryptographic needs of these networks such
us authentication, data integrity, privacy and
confidentiality have been analyzed in several
works. To meet these needs various known
mechanisms as digital signatures, hash codes or
MACs and even the use of pseudonyms have been
proposed. However, all these tools require
Certification Authorities (CA), responsible for
delivering public/private key pairs and certificates
(Raya, et al. 2007). Some authors propose a
Regional Transportation Authority that can be a
state, province, etc. (Sun and Fang, 2008). Other
authors propose a Department of Motor Vehicles (Li
and Wu, 2009). However, none of these proposals
are expected to be implemented in a near future.
An essential element when implementing these
networks is the cooperation between vehicles
because
being self-managed, the exchange of
messages about road conditions is vital. Therefore
this paper proposes new cooperative mechanisms to
ensure that the information is not lost within the
network.
The rest of the paper is organized as follows. We
describe the background in Section 2 and introduce
our approach in Section 3. In Section 4 we provide a
detailed description of the system. In Section 5 we
analyse our proposal. Finally, we present our
conclusions in Section 6.
2 BACKGROUND
In this network, each node is responsible for
determining the authenticity of the information and
reporting detected forgeries. If this happens, the
forgery node will not be authenticated by anybody in
the network and will be unable to get any profit from
this received information. The whole process will be
automatic and transparent to the network user. So,
there will be a responsible module for detecting false
or altered information and the information must be
signed to enable nodes to determine which, is the
node that presents a bad behavior, without revealing
its real identity. In order to do it, pseudonyms will
be used (Buttyan, Holczer and Vajda, 2007). In
addition, hash functions are used as a mechanism to
determine whether the information has been altered
or not.
It is required that users cooperate by relaying
packets to their neighboring nodes. Therefore, a
possible attack could come from a passive user of
the network. Such a user would benefit from getting
94
Molina-Gil J., Caballero-Gil C. and Caballero-Gil P. (2010).
COOPERATIVE APPROACH TO SELF-MANAGED VANETS.
In Proceedings of the International Conference on Wireless Information Networks and Systems, pages 94-97
DOI: 10.5220/0002991600940097
Copyright
c
SciTePress

information from the network but not participate in
the relay to its neighbor nodes. Consequently, we
need a module to determine if nodes cooperate by
relaying packets to their neighboring nodes. There
exists another type of attack that consists in relaying
packets to overload the network. In this case, nodes
would cooperate in the attack by contributing to
disseminate information that is useless or repeated.
These tools to avoid such attacks and their operation
will be detailed in Section 3.
During the network construction, each user must
get a pair of public and private keys in a
decentralized way. Additionally, a pseudonym will
be given to each new node so that it will be
associated to its cooperative or selfish behavior
without revealing its identity. This alias will be
created with an automatic generator to prevent the
existence of two identical pseudonyms.
3 SYSTEM DESIGN
This design is based on a store-and-forward routing
model (Li and Wu, 2008). In a typical packet
forwarding process in VANETs, vehicles encounter
one another at different times, and packets are
opportunistically forwarded. If an intermediate
vehicle stores a packet for a fixed time or actively
sprays the packet to other vehicles, the packet will
be more likely to reach a greater number of vehicles.
3.1 Cooperation
A bad behavior of a vehicle within a self-managed
network can consist in:
Inserting in the network false packets with
spoofed content on the state of the road or
inserting many times the same packet in search
of a Denegation of Service (DoS).
Not cooperating in relaying packets of its
neighbor nodes so that, it benefits from the
network without cooperating in its operation.
Detection of attackers should be automatic and
transparent to the user
. Hence, in order to detect
them, the packet must contain information about
management. The packets will include the following
information:
Coordinates and movement direction.
Vehicle speed.
TimeStamp.
Next Via.
The coordinates combined with movement
direction will provide information about the place
where the packet was generated and about the traffic
address where the problem is located. Besides, this
will allow dropping packets generated in a certain
defined range. A packet can be generated in
coordinates (X, Y) and certain range of interest for
this packet can be defined within a radius R. In this
way, the packet will be dropped when it reaches R.
The packet will be also discarded when its
TimeStamp passes
. Vehicle speed will allow making
decisions and altering the route to reach the
destination. One parameter to detect the fastest or
shortest route to the destination is the sum of all
speeds in the used vias. In this sense, our system can
detect whether there is a traffic jam in a specific
highway and provide the speed at which vehicles
move on it. This makes possible to have updated
information about the road all the time. Finally, the
information about the next via let us know whether
the traffic jam is across the entire highway or only in
a given road of the highway.
3.1.1 Detecting Misbehavior
Each vehicle must have a list where it store
information on those vehicles that have reported
misbehavior. This list is maintained by each node
and is modified during the interaction with other
vehicles. It can be updated whenever it detects a
vehicle's misbehavior and when vehicles exchange
packets. During the exchange of packets between
two vehicles, they have to swap their lists. Thus,
legitimate nodes in the network will have always an
updated list so that they will not send information to
nodes that have not worked on the network. Each
record in this list will contain the misbehaving
vehicles’ pseudonyms which will allow determining
who they are when they meet. The date of a bad
behavior is used to keep the list updated by deleting
old records. Another field with the signature of the
node who presented the complaint is also stored,
which allows avoiding a false allegations.
3.1.2 Characteristics
A good detection mechanism for cooperation must
have the following characteristics:
Flexibility
Protection
With regard to flexibility, we should note that a
hardware malfunction can make the device sends
messages with an incorrect or expired timestamp.
Therefore we should not be too strict and allow
nodes to recover from this problem.
Moreover, it
would be unfair to prevent the access of
COOPERATIVE APPROACH TO SELF-MANAGED VANETS
95
misbehaving nodes to the network forever after a
bad behavior.
The protection that this facility should offer must
ensure that the information that reaches the network
nodes is true, which avoids that nodes can
impersonate other nodes by sending fake packets on
their behalf. To ensure this, each intermediate
vehicle must be able to determine whether the
information generated by the source node has not
been altered. In this case, the source node will
compute a hash function of the packet signed with
its private key and will send its public key. Thus, if
the information has been altered, the intermediate
node will be able to detect it. Furthermore, thanks to
these detection mechanisms, selfish nodes can be
isolated from the network, which ensures that those
nodes involved in the network are reliable and so the
information they send.
4 OPERATING MODE
Each vehicle will store a list called General
Cooperation List (GCL) containing revoked
pseudonyms corresponding to vehicles that have
behaved badly against the operation of the network.
Thus, if a vehicle has useful information about the
state of the road and find another node that is within
its GCL, it will not provide it with such information.
Thanks to this procedure, nodes reject selfish
behavior within the network. Moreover, if a node
receives a packet from someone who is in its GCL, it
will discard the packet so that the misbehaving node
will not be able to continue attacking the network.
To update these lists it is important that the process
is efficient and based on a fast search algorithm.
Table 1 shows four possible fields in this list.
Table 1: Possible fields of the GCL.
Selfish
node’s
pseudonym
Selfishness
date
Complainant
node’s
pseudonym
Coordinates
(X,Y)
As previously discussed, a vital aspect for the
operation of the network is that nodes cooperate in
relaying packets of their neighboring nodes. To meet
this need, we propose the use of the Individual
Cooperation List (ICL). This list will not be shared
with any other vehicle in the network, as in the
previous case. It allows the vehicle to store
information about cooperation got from different
nodes it meets during its life on the network. Also
thanks to the ICL, the node can make decisions on
whether to cooperate or not with other nodes. To
control cooperation, an ACKnowledgment (ACK) is
used, so that it is received by each node which has
sent a packet. If a node A has some traffic
information, before providing it to B, it will question
it about B’s cooperation in the network. The node B
will answer with the last ACK it has received. If the
date of such ACK exceeds a limit m, defined by the
protocol in terms of network size, node A does not
retransmit the packet. Thus the nodes will be
motivated to cooperate in order to upgrade their
ACKs. We could think that there might exist certain
selfish behavior on the sending of the ACKs.
However this is not possible due to the
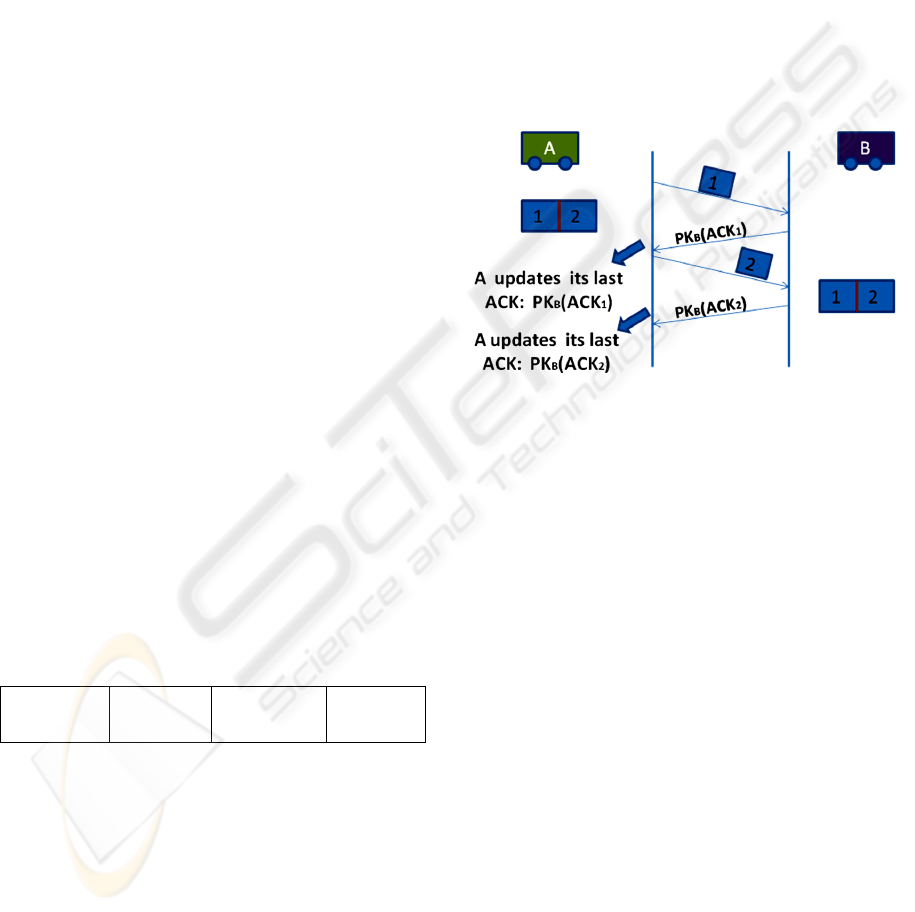
implementation of the protocol. Figure 1 shows in
more detail this operation.
Figure 1: Sending packets and confirmation of receipt with
ACK.
One node A that wants to send a packet of traffic
to B, first splits it into two parts. The purpose of this
split is to ensure that node A receives at least an
ACK as proof that it is cooperating before B
receives the complete information. So when B
receives the first part of the packet, it sends the ACK
signed by B (PK
B
(ACK)). Then A sends to B the
second part of the information so that B can recover
the contents of the packet. Finally B sends the final
ACK to node A.
If some of these nodes decide not to relay all
necessary packets for the exchange they will be
introduced in the ICL of the other detecting node.
5 ANALYSIS OF THE PROPOSAL
During the analysis of the proposed protocol, we
realized that many vehicles try to profit from the
network without participating in it. The cooperation
mechanism described above can solve this problem.
While the system cannot ensure 100% participation
of the nodes in the network, it can ensure that at
some point, selfish nodes try to avoid being isolated
WINSYS 2010 - International Conference on Wireless Information Networks and Systems
96

from the network and so participate in it.
As discussed above, nodes exchange their GCLs.
This implies that a node can try to attack other nodes
by inserting false records in its list. Therefore we
must define a criterion for determining whether a
node must be isolated or not, according to its
appearance in the GCLs. On the one hand a
minimum number of complaints could be defined
before marking a node as selfish. That is, if X nodes
agree that a particular node is selfish, it is probably
true. On the other hand, at least two of these
complaints should have different coordinates (x,y) in
order to avoid specific problems detailed below. To
choose the minimum number of complaints about
the same node that must be recorded before marking
it like a selfish node, one possible solution would be
to set this parameter as a function of the network
size. Therefore, the larger the network, the greater
this number must be. Another strange situation
happen when a vehicle is stopped on the roadway
due to an accident, car malfunction or even a phone
conversation. In any of those situations, the
automatic mechanism will detect a vehicle at 0 km/h
on a road and send a warning about a traffic jam that
does not exist. One option to solve this problem
would be to revoke the car, which then should ask
for a new key pair after explaining what has
happened. Another solution would be to use the
above idea and only revoke a node having a record
of misconduct in more than one place from more
than one node.
A third analyzed problem comes from the use of
ACK as a cooperative mechanism. New nodes that
have not participated in any retransmission will have
no ACK to receive packets from the network. One
solution would be that the authenticator node gives
them an ACK. Another option would be to wait till
the new nodes generate own packets, and after
sharing them with other cars, they will get an ACK
and will be able to participate in the network. The
best option will be determined during the
implementation of the proposal.
6 CONCLUSIONS
This paper proposes a new vision of a VANET in
which there is no centralized authority. This would
allow addressing all the weaknesses of this type of
networks and studying whether they are viable or
not. To carry out this process certain needs or
security requirements must be met to obtain the
contribution of the nodes that participate in it. This
paper proposes cooperation tools to ensure that the
information is reliable and that the nodes cooperate
in relaying it. We propose two lists as well as
mechanisms that allow nodes automatically to detect
misbehavior. Although so far these are only ideas,
the next step is the simulation and installation of a
wireless network to study the speed of transmission
of packets and the range of the connections.
ACKNOWLEDGEMENTS
Research supported by Ministerio Español de
Educación y Ciencia and European FEDER Fund
under TIN2008-02236/TSI Project, and by Agencia
Canaria de Investigación, Innovación y Sociedad de
la Información under PI2007/005 Project.
REFERENCES
Yousefi, S., Mousavi, M. S., Fathy, M., 2006. ‘Vehicular
Ad Hoc Networks (VANETs)’, Challenges and
Perspectives, 6th Int. conference on ITS
Telecommunications. China.
Raya, M., Papadimitratos, P., Aad, I., Jungels, D.,
Hubaux, J.-P., 2007. ‘Eviction of Misbehaving and
Faulty Nodes in Vehicular Networks’. IEEE Journal
on Selected Areas in Communications, Special Issue
on Vehicular Networks
Sun, J., Fang, Y., 2008. ‘A defense technique against
misbehavior in VANETs based on threshold
authentication.’, Proc. IEEE MILCOM 2008.
Li, F., Wu, J., 2009. ‘FRAME: An Innovative Incentive
Scheme in Vehicular Networks.’ Proc. of IEEE
International Conference on Communications, (ICC).
Buttyan, L., Holczer, T., Vajda, I., 2007. ‘On the
effectiveness of changing pseudonyms to provide
location privacy in vanets ’ Proceedings of the Fourth
European Workshop on Security and Privacy in Ad
hoc and Sensor Networks (ESAS2007). Springer.
Li, F., Wu, J., 2008. ‘A Winning-Probability-based
Incentive Scheme in Vehicular Networks.’ Proc. of
IEEE International Conference on Network Protocols,
(ICNP).
COOPERATIVE APPROACH TO SELF-MANAGED VANETS
97
