
IMPROVING PERSON DETECTION IN VIDEOS BY AUTOMATIC
SCENE ADAPTATION
Roland M
¨
orzinger and Marcus Thaler
Institute of Information Systems, Joanneum Research, Steyrergasse 17, 8010, Graz, Austria
Keywords:
Object detection, Ground plane, Surveillance, Robust statistics, RANSAC, Adaptation.
Abstract:
The task of object detection in videos can be improved by taking advantage of the continuity in the data stream,
e.g. by object tracking. If tracking is not possible due to missing motion features, low frame rate, severe occlu-
sions or rapid appearance changes, then a detector is typically applied in each frame of the video separately.
In this case the run-time performance is impaired by exhaustively searching each frame at numerous locations
and multiple scales. However, it is still possible to significantly improve the detector’s performance if a static
camera and a single planar ground plane can be assumed, which is the case in many surveillance scenarios.
Our work addresses this issue by automatically adapting a detector to the specific yet unknown planar scene.
In particular, during the adaptation phase robust statistics about few detections are used for estimating the
appropriate scales of the detection windows at each location. Experiments with an existing person detector
based on histograms of oriented gradients show that the scene adaptation leads to an improvement of both
computational performance and detection accuracy. For scene specific person detection, changes to the im-
plementation of the existing detector were made. The code is available for download. Results on benchmark
datasets (9 videos from i-LIDS and PETS) demonstrate the applicability of our approach.
1 INTRODUCTION
The performance of computer vision applications can
be optimized by incorporating scene context, such as
the knowledge about background, ground plane and
objects of interest. In the case of object detection,
the task of object detection can be simplified by fo-
cusing only on the scales and image regions where
the objects would typically appear. Consequently a
considerable speedup and increase in accuracy can be
achieved.
Prior work on exploiting scene context showed
that object tracking can be improved by relying on
the knowledge about a ground plane (Greenhill et al.,
2008; Renno et al., 2002). This work estimates the
depth of the scene at each pixel by observing mov-
ing objects in order to improve tracking of occluded
moving regions. It builds on the valid assumption
that in typical surveillance settings the object height
in the image varies linearly with its vertical position
in the image. The drawback of these approaches is
that the linear model, i.e. the camera viewpoint con-
sisting of gradient and horizon line, has to be de-
fined manually. Another work (Hoiem et al., 2006)
obtains an improvement over standard low-level de-
tectors by putting objects in perspective and reason-
ing about the underlying 3D scene structure. Specifi-
cally, estimates about the rough scene surface geom-
etry and the camera viewpoint supply likely scales
of the objects in the image. These estimates were
formed based on learning from a set of manually la-
beled horizons and available statistics for height dis-
tributions of 3D world objects. In their experiments
they used the Dalal&Triggs person detector (Dalal
and Triggs, 2005) to show how their approach im-
proves object detection of pedestrians and cars. A
framework for inferring scene information in monoc-
ular videos such as the relative depth and unevenness
of ground is proposed in (Zhu et al., 2008). The oc-
currence probability of pedestrians at each location
of the scene is learned in a semi-supervised fashion.
This process requires a large amount of video data
and a number of manually marked pedestrian samples
which are collected over time at different positions in
the scene. Recently, in (Stalder et al., 2009) the rough
3d scene context is explored for learning grid-based
object detectors. This approach assumes overlapping
calibrated views of the same scene so that correspond-
ing regions from the different views can be used as
training samples.
333
Möerzinger R. and Thaler M. (2010).
IMPROVING PERSON DETECTION IN VIDEOS BY AUTOMATIC SCENE ADAPTATION.
In Proceedings of the International Conference on Computer Vision Theory and Applications, pages 333-338
DOI: 10.5220/0002820203330338
Copyright
c
SciTePress

Recently a work that is able to deal with arbi-
trary ground surfaces using online learning has been
proposed (Breitenstein et al., 2008). Multiple walk-
able surfaces of a scene are derived from the output
of a pedestrian detector based on an entropy frame-
work. According to the authors, this is the first work
to exploit scene structure for optimizing the location-
dependent scale range parameters used for improving
object detection. They show that their method effec-
tively limits the number of detection windows com-
pared to an original pedestrian detector (Dalal and
Triggs, 2005). Conceptually, the above work is most
closely related to ours, but we try to simplify the task
by introducing additional assumptions that are valid
in many surveillance scenarios, namely a static cam-
era and a single planar ground plane.
In this paper we propose a robust model for au-
tomatically adapting a person detector to an unknown
ground plane. The adaptation phase is based on statis-
tics about detection results received from the detector
itself. It densely scans a few frames of the sequence at
a large number of scales and locations. This informa-
tion is used for estimating the specific scene scales.
In the scene specific detection phase, the search space
for this detector is pruned and thus an improvement
of computational time and accuracy is achieved.
2 AUTOMATIC SCENE
ADAPTATION
By focusing on visual surveillance scenarios where
static cameras observe areas containing a single pla-
nar ground plane, the general problem of scene adap-
tation can be simplified. It is assumed that objects of
interest are of approximately equal size and that they
are located on the ground plane. Therefore the object
size depends on the projected position in the image
coordinate system. If the camera is mounted horizon-
tally with respect to the ground plane, i.e. there is no
camera roll, the size of the object is solely linearly
dependent on its vertical position in the image.
Our approach aims at automatically estimating
this relationship based on robust statistics about de-
tection results. The goal is to get by with only a small
number of detections in a few video frames. Addi-
tionally, the usage of a single frame detector avoids
a dependency on successful object tracking which be-
comes difficult in scenes with severe occlusions, rapid
appearance changes and crowds. Our proposal to im-
prove a person detector is summarized in Figure 1.
First, the detector densely scans sample frames of the
input video at multiple locations as well as scales and
collects detection results and their confidence scores,
if available. Second, based on these detection re-
sults the scene scales are estimated during the adap-
tation phase. Third, this information is used for scene
specific person detection by pruning the search space
which in turn provides a computational speedup and
higher detection accuracy.
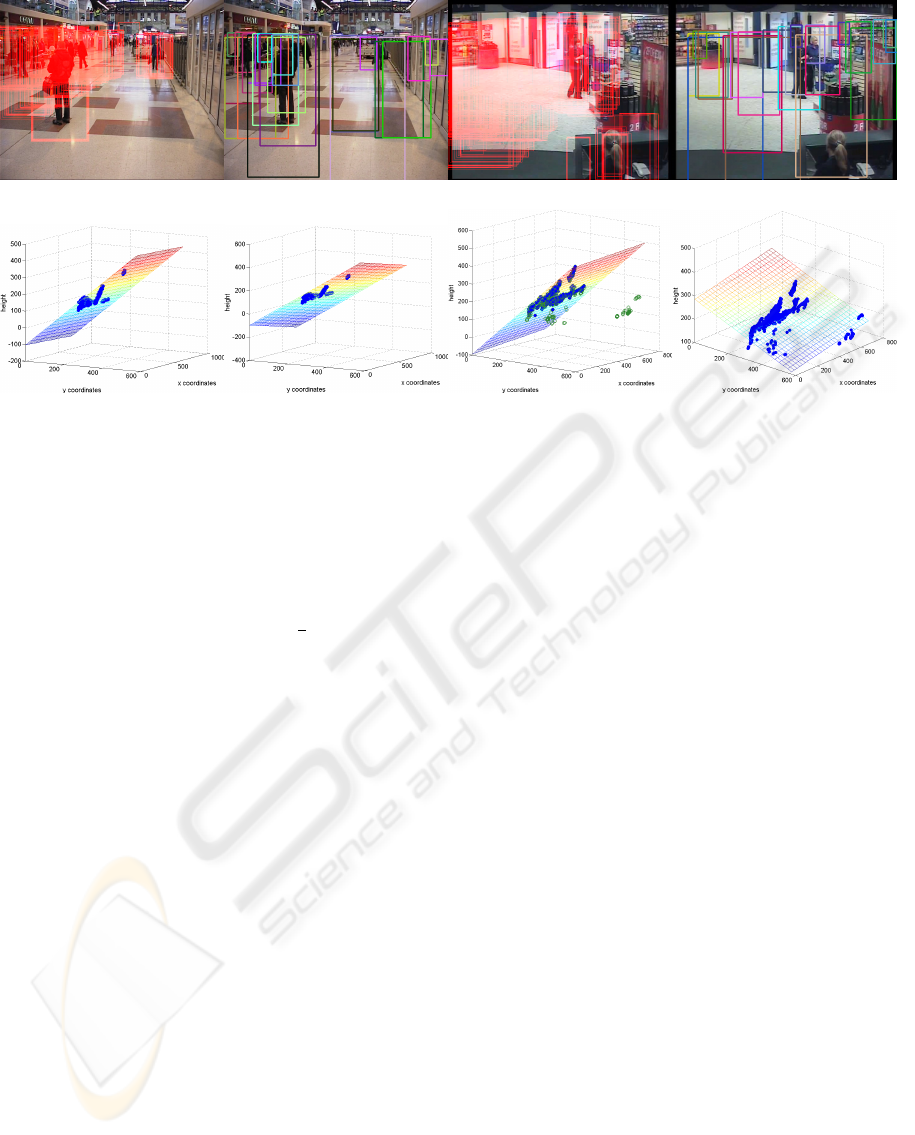
Figure 1: Scene adaptation. Positive detections (white) are
collected by exhaustive scanning in multiple scales with a
sliding window. After adaptation to the scene, the optimized
detector scans the different image areas with detection win-
dows of appropriate scale.
2.1 Scene Scale Estimation
For collecting the person detections we use the pub-
licly available implementation
1
of the histograms of
oriented gradients based pedestrian detector from
Dalal&Triggs (Dalal and Triggs, 2005). This detec-
tor achieves state-of-the-art performance on full-body
pedestrian detection (Doll
´
ar et al., 2009). For each
input image the detector classifies detection windows
at multiple scales and locations into ’no pedestrian’
or ’pedestrian’ each with a confidence score. The in-
put data to the scene scale estimation is a collection
of positive person detection results. Specifically, it
consists of the persons’ feet positions (x and y image
coordinate of the bottom center of each detection),
the height of the detections and their classification
scores. Obviously these observations may contain er-
rors especially in cluttered background and difficult
illumination conditions. The task is to robustly esti-
mate the object scale as a linear function of x and y in
the presence of false-positive errors. Since noisy data
strongly influences linear regression we propose to re-
move the outliers by fitting a plane into the 3D point
cloud using RANSAC (Fischler and Bolles, 1981).
1
INRIA Object Detection and Localization Toolkit for
Windows (http://pascal.inrialpes.fr/soft/olt/), source code
from http://www.computing.edu.au/ 12482661/hog.html
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
334
(a1) (b1) (a2) (b2)
(c1) (d1) (c2) (d2)
Figure 2: Scene scale estimation for example data with (*2) and without (*1) outliers. Accumulated detections from original
detector during adaptation phase (a*), sampled scene specific detection windows obtained from proposed scale estimation
(b*), estimated scale model using proposed approach (c*), baseline scale model using robust regression (d*). In the presence
of outliers (green circles in c2) a proper scale model is only obtained from the proposed approach. Best viewed in color.
RANSAC is a method for estimating the parameters
of a model that optimally fits data with many outliers.
The critical threshold value t for determining when a
data point fits the model was set to
1
4
th of the aver-
age observed person height which allows for a certain
variance in person heights. Subsequently, the linear
scale model is robustly fitted on the remaining in-
liers by taking into account their confidence scores,
i.e. considering them as weights. The idea is to down-
weight the influence of an unreliable observation on
the fit. For that purpose we obtain the weighted least-
squares solution to the linear system
h(x, y) = b(1) ∗ x + b(2) ∗ y + b(3)
where - after solving the set of linear equations - b
is a vector of size 3 containing the 3D plane coeffi-
cients and h represents the estimated scale function
depending on the image coordinates x and y. In the
above multiple linear regression problem, the weight-
ing is equivalent to multiplying each observation by
its confidence score. The greater the weight given to
an observation, the more reliable it is. Figure 2 illus-
trates the idea of using outlier removal and weighted
regression for scene scale estimation by means of two
examples. For two different scenes 200 collected
detections obtained from the detector by exhaustive
search during the adaptation phase are shown (a*).
The figures in the subplots (c*) show the results of
the proposed scene scale estimation by plotting the
height over the x and y image coordinates of the ob-
servations and the resulting linear scale model. For
comparison and baseline, results when using a ro-
bust multi-linear regression (robustFit in Matlab) are
given in subplot (d*). The figures in the subplots (b*)
show examples of estimated detection windows after
scene scale estimation. The example on the right (*2)
contains false positive observations as can be seen in
the bottom right corner of the image with the col-
lected detections (a2) and the data plots. The baseline
approach estimated an obviously wrong scale model
(d2) because the regression method was strongly in-
fluenced by these outliers, plotted with green circles.
The proposed approach, however, generates a valid
scene scale model (c2).
2.2 Scene Specific Person Detection
To demonstrate the benefit of the scene scale esti-
mation for person detection, we extended the exist-
ing implementation of the person detector of Dalal
and Triggs (Dalal and Triggs, 2005). This detector
densely scans each input image at a large number of
possible scales and locations with detection windows
of 128x64 pixel size. To this end, the gradients of
the image are computed from a scale space pyramid.
By default, the pyramid starts at scale 1.0 and gets in-
creased by 5% until the size of the detection window
exceeds the dimension of the input image. Subse-
quently, all detection windows are classified accord-
ing to their feature descriptor (histogram of oriented
IMPROVING PERSON DETECTION IN VIDEOS BY AUTOMATIC SCENE ADAPTATION
335
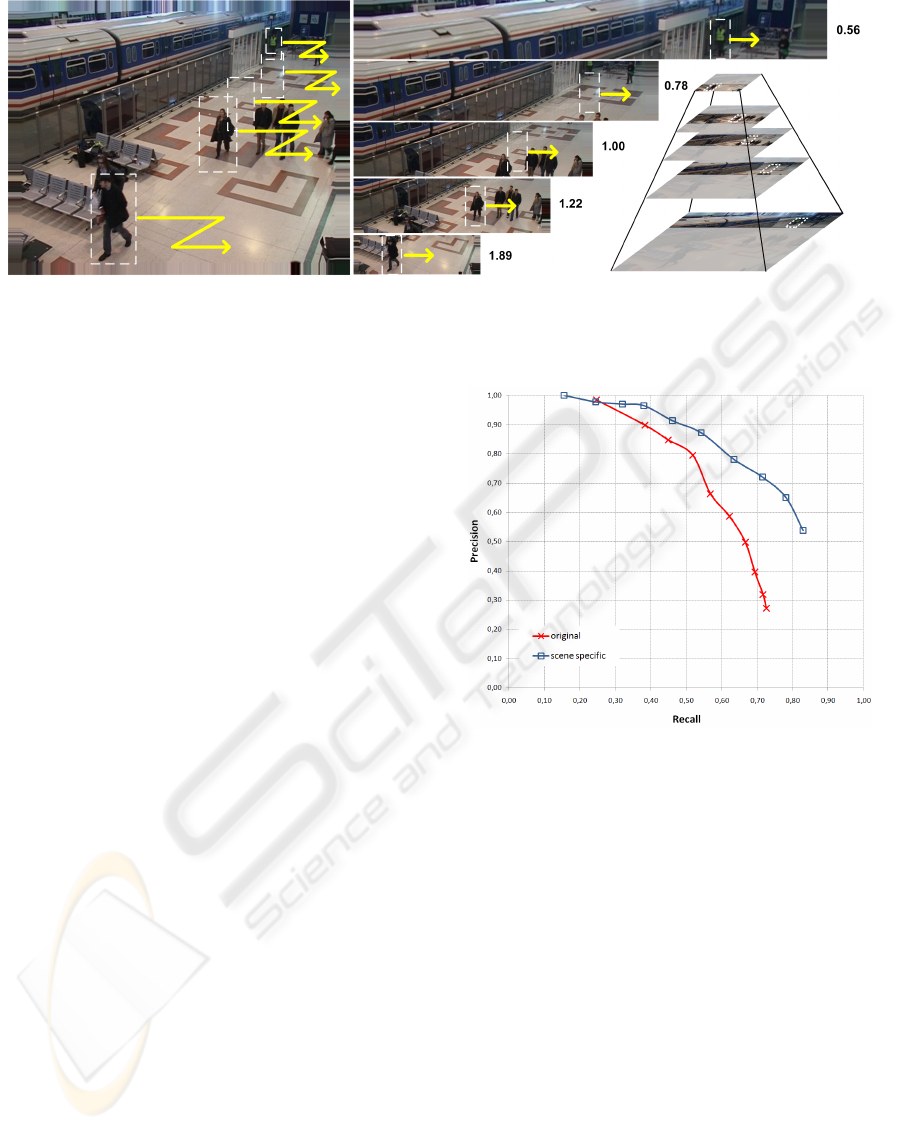
Figure 3: Pruned scale space shown for 5 exemplary scales. Instead of densely scanning the input image (left) at each location
and numerous scales, only a subset of the scale space pyramid needs to be processed (center) if scene scale information is
used. The bigger part of the scale space remains unprocessed (shaded area on the bottom right).
gradients).
The basic idea of scene specific person detection
in videos is to restrict the detection area to the relevant
parts in the scale space. A list of detection windows
is constructed where for each detection window the
scale and location is specified as a result of the scene
scale estimation. We extended the existing implemen-
tation so that it accepts this list via the newly added
command line option (-sc). Attention is paid to the
fact that the locations and dimensions of the detection
windows need to be aligned on a spatial grid because
the base implementation tries to cache the feature de-
scriptors for performance reasons. Every different
scale involves a preprocessing step where the image
is rescaled accordingly, followed by a computation
of the image gradients. The benefit of the restricted
scale space is that the preprocessing is only made in
relevant image parts and scales (see Figure 3).
Summarizing, the scene estimation entails the fol-
lowing performance improvements. First, for each
scale the number of detection windows subject to
classification is generally reduced. Second, only the
relevant scales need to be processed. The number
of relevant scales is typically smaller than with ex-
haustive search. Third, the preprocessing step of each
scale speeds up since only subparts of the image are
analyzed.
3 EXPERIMENTS AND RESULTS
This section presents evaluation results of the im-
proved scene specific person detector on a variety of
different datasets. Figure 5 shows qualitative results
on 9 different examples from the i-LIDS(UK Home
Office, 2008) and various PETS datasets which are
commonly used for benchmarking of detection and
Figure 4: Precision recall graph for varying discrimination
thresholds of the scene specific and original person detector.
tracking systems. For each of the different videos
the scene scale is estimated using detection results ob-
tained in the first 150 to 500 video frames (the exact
number is shown in the image captions in brackets).
Figure 5 demonstrates that false positive detections
at wrong scales are generally eliminated if the detec-
tor uses the scene scale information (i-LIDS camera
1 and PETS 2009 view 002). The original detector
scans the image at scale 1.0 and above, whereas the
scene specific detector analyzes the priorly estimated
relevant scales. Thus a higher recall is achieved as can
be seen from a better detection of people at smaller
scales (i-LIDS and PETS 2006).
For qualitative evaluation we compare the results
of the scene specific detector and the original detec-
tor. To this end, the number of recognizable persons
(ground truth), true positive and false positive detec-
tions are manually determined for 50 test images of
each of the 9 videos. These test images are randomly
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
336

i-LIDS MCTS camera 1 (500) i-LIDS MCTS camera 3 (250) i-LIDS MCTS camera 5 (300)
PETS 2006 cam 1 (250) PETS 2006 cam 4 (150) PETS 2007 cam 1 (400)
PETS 2007 cam 4 (400) PETS 2009 view 001 (200) PETS 2009 view 002 (200)
Figure 5: Different test images and detection results obtained from proposed scene specific person detector (white dashed)
and the original detector (solid black). The number of images used for the scene scale estimation is given in brackets.
taken from the parts of the videos that have not been
used for estimating the scene scale. The criteria for
recognizable persons is a person size greater than or
equal to 90 pixels and an unoccluded view of at least
80% of the full body. Detections in over-crowded
scenes are not taken into account. Further, the dis-
crimination threshold (SVM) of the detectors is var-
ied by using a set of 10 thresholds (0.5, 0, -0.25, -0.5,
..., -1.75, 2.0). In total, detection results for 9000 im-
ages (2 detectors * 9 sequences * 50 test images *
10 thresholds) are evaluated. The mean difference in
precision and recall is demonstrated in Figure 4. The
scene specific detector increases the maximum recall
by 10% to 83%. As a result of the increasing number
of false positive detections at lower thresholds, the
precision of both detectors generally decrease while
higher recall values are obtained. Yet, for the scene
specific detector the threshold can be lowered with
less significant loss in precision. Using the scene
scale estimation the improvement in recall is 10% at
the precision of 80%, and at the recall of 70% the pre-
cision is increased from 38% to 73%.
A comparison of computational performance pa-
rameters between the original and the scene specific
detector is given in Table 1. It shows the average num-
ber of detection windows, scales and run-time perfor-
mance measured on 100 random images taken from
each of the 9 sequences shown in Figure 5.
IMPROVING PERSON DETECTION IN VIDEOS BY AUTOMATIC SCENE ADAPTATION
337

Table 1: Comparison between the scene specific detector
(center column) and the original detector using exhaustive
search (left). For achieving comparability, the scene spe-
cific detector is also applied on scale 1.0 and above (right).
exhaust. scene scene
scales used all ≥ 1 relevant rel. ≥ 1
nr. det. windows 48016 3672 2409
nr. scales 33 29 16
time preproc. 4.82 3.64 1.62
time analysis 10.66 4.26 1.97
time total (sec.) 15.48 7.90 3.59
It has to be noted that the original detectors scans
the image at all possible scales greater than 1.0 with
an increment of 5%. The proposed scene specific de-
tector analyzes all relevent scales (with the same scale
increment), which may include scales smaller than
1.0. To enable direct comparison Table 1 also gives
results for the proposed scene specific detector apply-
ing a same minimum scale of 1.0. Using the scene
scale estimation the number of detection windows and
the number of processed scales can be significantly
reduced resulting in an average computational speed-
up by a factor of 4. The increased run-time perfor-
mance is mainly due to the reduced number of scales
and locations at which the feature descriptors have to
be computed. Since the base implementation already
caches and reuses priorly computed descriptors the
20-fold reduction of the number of detection windows
only leads to a 5-fold reduction of analysis time.
4 CONCLUSIONS
A robust approach for automatically adapting a de-
tector to an unknown planar scene is described. Ex-
periments on a variety of datasets demonstrate that
scene specific detection gives a speed-up by a factor
of 4 and a significant improvement in precision and
recall compared to an existing person detector. The
Matlab implementation of the scene scale estimation
and the code changes to the original person detector
in C++ (Dalal and Triggs, 2005) are made available
for download
2
. One open issue is the number of ob-
servations that are needed for a robust scene scale es-
timation. Although theoretically only few (3) good
detections are required for a planar scene model, the
estimate gets more reliable the more detections are
available. In our experiments promising results were
obtained using a few hundred detections. If many ob-
servations are available it is preferable to sample the
most probable detections (according to the detector’s
2
http://scovis.joanneum.at/sceneadaptation
confidence score) with a large coverage of the image
area. Given the low computational complexity of the
scene scale estimation an incremental application of
the approach is proposed.
ACKNOWLEDGEMENTS
The authors would like to thank their colleague Georg
Thallinger, Helmut Neuschmied and Werner Haas.
The research leading to these results has received
funding from the European Community’s Seventh
Framework Programme FP7/2007-2013 - Challenge
2 - Cognitive Systems, Interaction, Robotics - under
grant agreement n216465 - SCOVIS.
REFERENCES
Breitenstein, M. D., Sommerlade, E., Leibe, B., van Gool,
L., and Reid, I. (2008). Probabilistic parameter se-
lection for learning scene structure from video. In
BMVC.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR.
Doll
´
ar, P., Wojek, C., Schiele, B., and Perona, P. (2009).
Pedestrian detection: A benchmark. In CVPR.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM.
Greenhill, D., Renno, J., Orwell, J., and Jones, G. A. (2008).
Occlusion analysis: Learning and utilising depth maps
in object tracking. Image Vision Computing.
Hoiem, D., Efros, A. A., and Hebert, M. (2006). Putting
objects in perspective. In CVPR.
Renno, J. R., Orwell, J., and Jones, G. A. (2002). Learning
surveillance tracking models for the self-calibrated
ground plane. In BMVC.
Stalder, S., Grabner, H., and van Gool, L. (2009). Explor-
ing context to learn scene specific object detectors. In
Performance Evaluation of Tracking and Surveillance
workshop at CVPR.
UK Home Office (2008). i-LIDS multiple camera tracking
scenario definition.
Zhu, L., Zhou, J., Song, J., Yan, Z., and Gu, Q. (2008).
A practical algorithm for learning scene information
from monocular video. Optics Express.
VISAPP 2010 - International Conference on Computer Vision Theory and Applications
338
