
ACHIEVING ROBUSTNESS IN ADAPTIVE SYSTEMS
Can Hierarchies Help?
Dragana Laketic and Gunnar Tufte
Department of Computer and Information Science, Norwegian University of Science and Technology
Sem Saelands vei 7-9, NO-7491 Trondheim, Norway
Keywords:
Robustness, Adaptive systems, Environmental fluctuations, Living systems organisation, Modularity, Hierar-
chies.
Abstract:
In this paper we present the latest research directions within the investigation of adaptive autonomous systems.
Originally inspired by biological solutions for performing adaptive processes, we have engaged into investi-
gating organisation of living systems with the aim of extracting useful principles for man–made systems. The
work so far has demonstrated in simulation how principles of endocrine system can be used for the initia-
tion and support of adaptive processes until the adaptation to new environmental fluctuation is achieved. Our
current research considers robustness of the system and sets the stage for the investigation into hierarchical
organisation of such a system. The main question we ask is if the robustness of the proposed system could be
improved if hierarchies in its architecture and (or) functional operation are taken into account.
1 INTRODUCTION
The motivation behind the work presented herein lies
in one of the greatest challenges today’s electronic
systems face when set to operate within the harsh
varying environments. On one hand, the system needs
to adapt to variations in the environment so that it
preserves desired functionality; on the other, harsh
environments impose additional requirements which,
when summed up, come to the necessity for robust
operation. Different techniques exist for achieving ro-
bustness in such systems (see (Laketic and Haddow,
2007) for the example of extreme temperature envi-
ronments). However, achievement of the robust adap-
tive process presents an additional challenge when
adaptive systems are considered. Moreover, opera-
tions within harsh environments as a rule exclude hu-
man intervention so that the system is to operate and
adapt in autonomous fashion.
Living systems are faced with similar demands –
they need to survive despite the varying environment.
Therefore, our investigation into autonomous adap-
tive systems has lead us to taking a closer look into
the mechanisms and principles through which adap-
tation is achieved in these systems. In particular, we
have considered the processes through which a living
system preserves its homeostasis. The focus has been
set on endocrine system and its role within homeo-
static processes for performing control and communi-
cation. Through simulations on a simple model, we
have demonstrated how adaptation to a fluctuation in
some environmental parameter is achieved when ini-
tiated and sustained by hormonal flows.
The aim of this paper is to present our current
activities and considerations which are focused on
the living systems’ organisation, in particular its hi-
erarchical organisation and the impact the hierarchies
may have on the system’s adaptability and robustness.
In the further text, we first present some background,
section 2, and introduce the reader to the previous
work, section 3, through the introduction of the model
of the system under investigation and brief summary
of the results achieved so far. There, we also intro-
duce novel features of such model with the aim of es-
tablishing more formal framework for tackling the ro-
bustness issue. Also, we draw a parallel between the
organisation of a living system unit and the cell within
our modular system. This all offers firmer grounds for
the introduction of hierarchical organisation as is dis-
cussed in section 4. Finally, we conclude the paper
with the discussion on the results achieved and con-
sideration of the work that lies ahead.
422
Laketic D. and Tufte G. (2010).
ACHIEVING ROBUSTNESS IN ADAPTIVE SYSTEMS - Can Hierarchies Help?.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Artificial Intelligence, pages 422-427
DOI: 10.5220/0002762004220427
Copyright
c
SciTePress
2 PRINCIPLES TO BORROW
FROM LIVING SYSTEMS:
SETTING THE STAGE
Living systems’ viability is the result of their adapt-
ability. This remarkable ability is the result of a
long term process of evolution. More precisely, it
is through a process of coevolution with the environ-
ment that living systems have been created. As no
environment is static so the coevolutionary process
needed to account for these environmental variations
and equip the living systems with mechanisms to aid
them in survivingdespite varying environment. These
mechanisms are activated when variation in the envi-
ronment is detected or sensed, the term better suited
for a living system.
But firstly, the distinction between different terms
need be explained which are used throughout the text
to denote environmental variations. These distinc-
tions are primarily made based on the temporal du-
ration of the variation. The long–term variations will
be referred to as changes. Their effect is imposed over
a longer period on a scale measured from one individ-
ual’s lifetime. Therefore, effects of such variations
are noticable at the population level and are tackled
by evolutionary processes. The short–term variations,
i.e. those whose effect happens at the time scale much
shorter than individual’s lifetime, will be referred to
as disturbances.
Secondly, we need to explain the view of living
systems from the framework of the general system
theory (von Bertalanffy, 1973). Within such a frame-
work, living systems are viewed as open systems
which are in stable or steady state, a consequence of
this being preservation of homeostasis (Ganti, 2003;
Walter, 1967). Therefore, disturbance is any variation
in environment which momentarily moves the system
from its steady state. Further, we recognise that some
disturbances will lead the system to such states from
which they can re–gain the steady state after hav-
ing performed some adaptive process(es) (short–term
in comparison with coevolutionary processes), while
some of the disturbances will take the system to the
states from which they will not be able to recovertheir
stability (steady state) i.e. where they will lose their
viability and die.
The first group of disturbances we term fluctu-
ations and our previous work (Laketic et al., 2009;
Laketic and Tufte, 2009a; Laketic and Tufte, 2009b)
has considered mainly this kind of environmental
variations. Our current work considers the system’s
ability to escape from the states where no return to a
steady state is possible. This ability is considered to
be robustness of the system. To sum up, we say that a
system is robust if it can return to its steady state af-
ter it has been moved from it by some environmental
disturbance. Out of many ways in which robustness
can be improved, we are, in particular, posing a ques-
tion if hierarchical organisation of an adaptive system
could enhance the degree of the system’s robustness
and, if so, how.
3 MODEL OF THE SYSTEM
UNDER INVESTIGATION
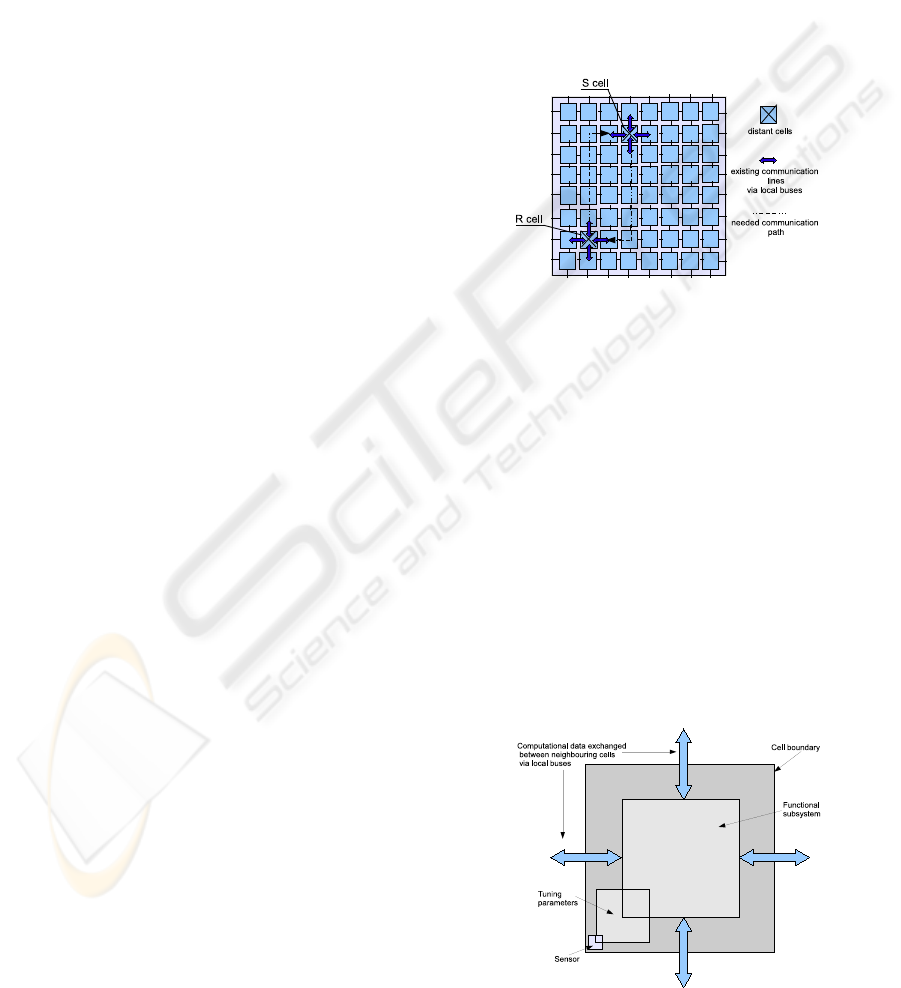
Figure 1: Schematic view of the system’s architecture.
In order to examine adaptive processes in a man–
made system, we have made a model of such a system
as a basis for simulations. It is schematically depicted
in figure 1. Detailed introduction of the model can be
found in (Laketic et al., 2009), while at this place we
only briefly number its fundamental properties: the
system is modular and consists of a number of cells
(modules), the cells are placed in a grid formation, the
cells are identified by two types of identifiers (physi-
cal ID referring to the cell’s position witin the grid
and encoding ID referring to the cell’s functional re-
latedness with other cells). The system’s functionality
is dependent on the functionality of its cells.
3.1 The System’s Cell
Figure 2: Schematic view of the cell’s subsystems.
ACHIEVING ROBUSTNESS IN ADAPTIVE SYSTEMS - Can Hierarchies Help?
423

0
(L,Li,Ei)
4
(RP,Li,Ei)
3
(P,Li,Ei)
1
(S,Li,Ei+/-1)
9
(P,F,Ei+/-1)
2
(R,Li,Ei)
8
(L,F,Ei+/-1)
5
(SP,Li,Ei+/-1)
6
(S,A,Ei+/-1)
7
(SP,A,Ei+/-1)
4
()
0
(L,Li+/-1,Ei+/-1)
3
()
2
()
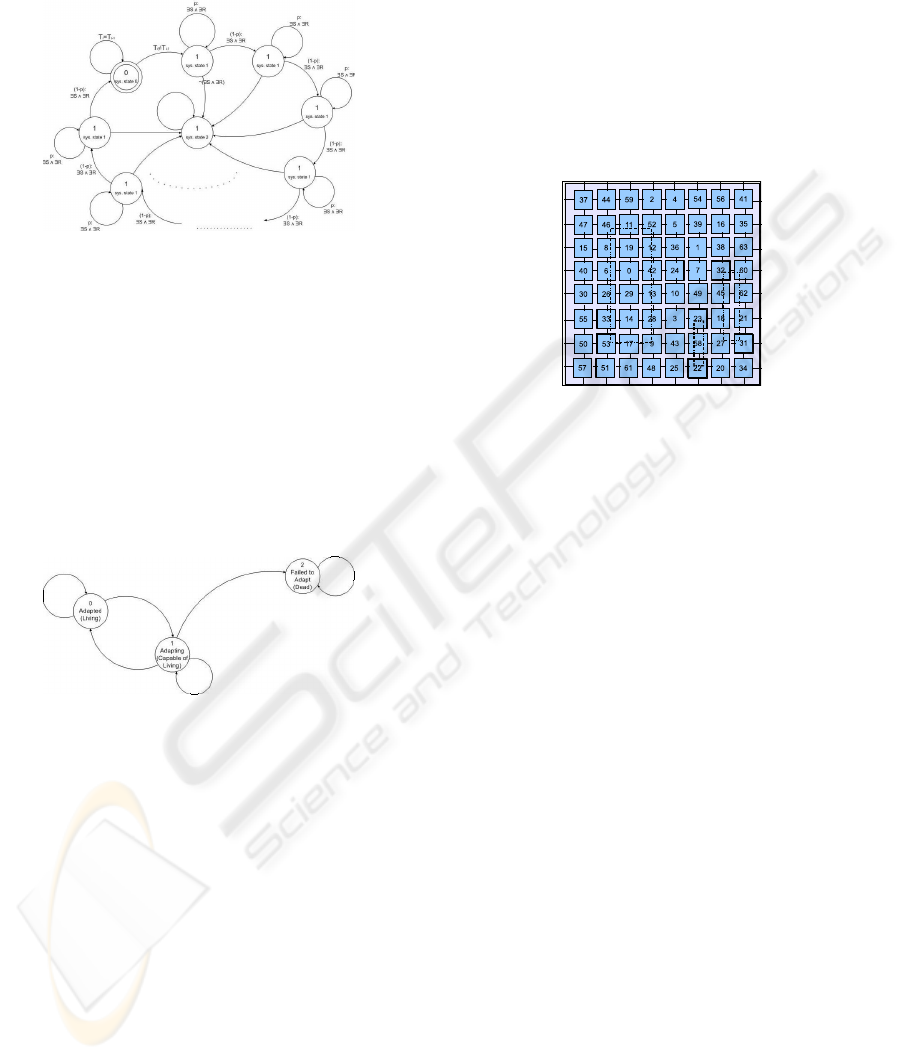
Figure 3: Finite state machine describing the cell’s be-
haviour.
In modelling the system’s cell, several theories have
been considered which present the living system or-
ganisation (Ganti et al., 2003; Maturana and Varela,
1973; Eigen and Schuster, 1979). Their, perhaps
greatest, commonality lies in underlying cyclic na-
ture of this organisation and, as nicely put in (Ganti,
2003), that living is happening rather than being.
Ganti’s chemoton theory was chosen for further work
(Ganti et al., 2003), in which a model of a minimal liv-
ing system is presented. Such choice was motivated
by the theoretical rigour with which the theory is pre-
sented as well as for its clarity.
In short, according to this theory, living system
consists of three subsystems: one corresponds to
metabolic network, the second carries information for
template polymerisation and the third one is a mem-
brane which divides the living system from its sur-
roundings. Conceptually, we also recognise three
subsystems within the cell of our modular system
model. The functional part of the cell i.e. the sub-
system within the cell which is performing some
functionality, corresponds to the information carry-
ing subsystem. The tuning parameters which deter-
mine operation of the functional part correspond to
the metabolic network. These parameters’ values are
being adjusted during the adaptation process so that
the functionality they influence is preserved.
It can be argued if the analogy is righteous be-
cause in living systems these subsystems can be al-
tered through evolutionary variations while in our sys-
tem it corresponds to the case when it is altered by
some adaptive processes which occur at a smaller
time scale, as distinguished in section 2. However, at
this stage we leave it as simple as that and recognise
that such choice leaves the room for further work to
include evolutionary processes as well into the subset
of processes which can alter the cell’s tuning parame-
ters.
Further, as explained in chemoton theory, these
subsystems within the living system are stoichiomet-
rically coupled. In our model this coupling is realised
through the functionality being dependent on the tun-
ing parameters value. In a real electronic system,
for example, this coupling would be realised through
functional interdependency of various electrical val-
ues involved.
Let us take a brief look into the cell’s behaviour.
The cell’s state is represented as a 3-tuple (H,A,E),
the first value, H, referring to the hormonal flows, the
second, A, to the cell’s functionality and the third, E,
to the value of some environmental parameter con-
sidered for the description of fluctuation in the cell’s
environment. Their possible values are, respectively:
• H, presence or absence of hormones: L - no hor-
mone present, S - sending S hormone (the hor-
mone secreted in response to the sensed environ-
mental fluctuation), R - sending R hormone (the
hormone secreted by the cell when it recognises
that the incoming S hormone comes from its func-
tionally related cell), P - passing hormone not
functionally related to the cell, SP - both S and
P, PR - both P and R;
• A, functionality the cell performs: L0, L1, L2, L3
or L4 - functionality adapted to E0, E1, E2, E3
and E4 respectively, A - adapting or F - failed to
adapt;
• E, the cell’s local environment: E0, E1, E2, E3
and E4 - five different values of the environmental
parameter under consideration.
Now, let us take a closer look into the cell’s be-
haviour with respect to hormonal secretion. Seen
through the formalism of cellular automata, our sys-
tem represents a uniform cellular automata which
means that all the cells are behaving according to
the same finite state machine, as given in figure 3.
Control variables for state transitions are following:
the change in the environmental parameter (EE), the
cell’s S hormone present (SM), the cell’s R hor-
mone present (RM), hormones from functionally un-
related cells present (HO), the incoming S hormone
recognised (RR), the incoming R hormone recognised
(FB). They have been omitted from the figure for the
sake of clarity. The states referring to cases when the
cell’s functionality is corresponding to the value of its
environmental parameter are considered stable states.
In figure 3, these are the states 0 and 3. When the
cell is in one of these two states, it is in a stable state.
When the adaptation is achieved, the cell movesto an-
other stable state which corresponds to the new value
of the environmental parameter (in figure 3 it is the
states 0 and 3 in the region to the right from the dot-
ted line, see (Laketic et al., 2009) for detailed descrip-
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
424
tion). Thus, our system preserves its homeostasis by
achieving (ultra)stability, which is in accordance with
the seminal work of W.R. Ashby (Ashby, 1960).
Figure 4: Cell’s functional states during adaptation process.
The information sent by the cell to its neighbours,
as dependent on the states, is as following, see fig-
ure 4: ’0’ when in adapted states and not sending S
hormone (states 0,2,3 and 4), ’1’ when secreting S
hormone (1,5,6 and 7), -1 when failed to adapt (8,9).
Such functionality is included into the model for
the sake of simplicity and clarity when analysing
adaptive processes.
3.2 System’s Behaviour
Figure 5: Finite state machine describing the system’s be-
haviour.
The state of the system is dependent on the states of
its cells. We distinguish the following three states in
which the system can be:
• Stable, when all the cells are in one of the adapted,
stable states
• Adapting, when at least one of the cells is per-
forming adaptation process
• Failed to adapt, when at least one of the cells has
failed to adapt to environmental fluctuation
We can relate these system states to the levels of
life as distinguished by Ganti in (Ganti, 2003; Ganti
et al., 2003). The stable state (state 0) would cor-
respond to the living system in the state living; the
state adapting to the state capable of living; finally,
the state failed to the state dead. It can be noticed
that while living systems are possible to move from
the state living to the state dead, in our state diagram
such transition is not made possible, see figure 5. This
has been made so on purpose with the aim of keeping
the attention only on adaptive processes and the abil-
ity of the system to adapt. In our case, such transi-
tion would, namely, correspond to the case when the
system’s functionality deteriorates due to some other
cause, not the environmental fluctuation.
3.3 A Glimpse to Previous Findings
Figure 6: Encoding IDs and hormonal loops between func-
tionally related cells.
As mentioned, our investigation so far has considered
autonomous adaptation to environmental fluctuations,
as introduced in section 2. We have examined the
possibility for the achievement of adaptation by the
assumed system and several aspects of such adapta-
tion processes. In particular, in (Laketic et al., 2009)
it has been shown how adaptation process inspired
by human hormonal control and communication can
initiate and sustain adaptation process until adapta-
tion is achieved. There, we have also considered op-
timal amounts of hormones needed for the achieve-
ment of adaptation under stochastic adaptation pro-
cess. This has been subject of particular interest be-
cause these amounts are related to the use of the sys-
tem’s resources, a requirement for the efficient use of
resources being one of the ever–lasting challenges in
man–made systems. Further, in (Laketic and Tufte,
2009a) it has been pointed that adaptation may be
viewed as a result of a particular pattern formation
within the system’s tissue, see figures 6 and 7. These
patterns which arise upon the environmental fluctua-
tion are due to the formation of hormonal loops and
are dependent on the functional interdependency be-
tween the system’s cells. Also, further research di-
rections have been addressed in (Laketic and Tufte,
2009b) for which the considerations presented at this
place represent a continuation of reasoning.
ACHIEVING ROBUSTNESS IN ADAPTIVE SYSTEMS - Can Hierarchies Help?
425
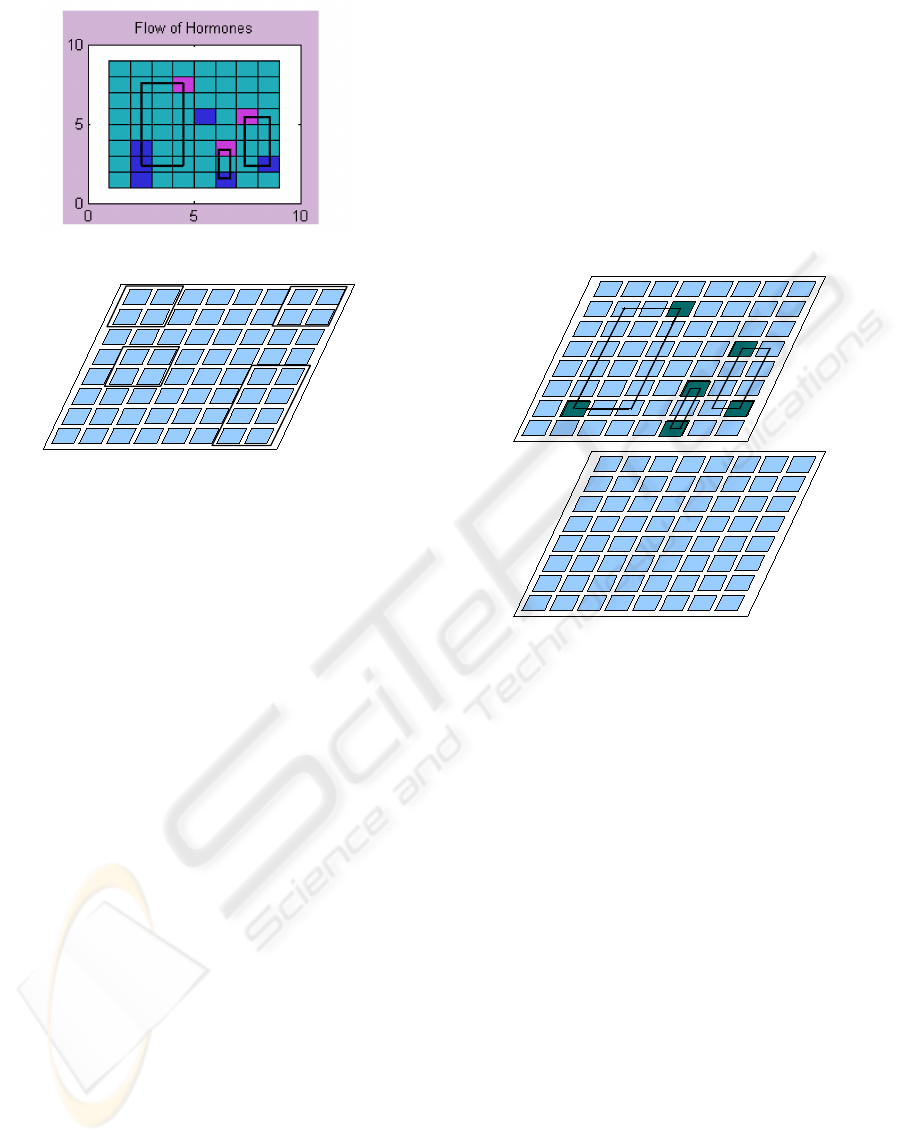
Figure 7: Hormonal loops during simulation runs.
Figure 8: Schematic view of hierarchical architecture based
on the underlying structure.
4 INTRODUCING HIERARCHIES
Complex adaptive systems coming from nature are
characterized by hierarchical organization. Such or-
ganization gives rise to novel properties and processes
to occur at a higher hierarchical level. In biology, hi-
erarchical structure is believed to be essential for the
correct and efficient functioning of natural systems.
Hierarchical structure has been adopted in man–made
systems as well. Therefore, we would like to further
develop our model so as to incorporate different hier-
archical levels. However, this does not appear to be
a trivial task. Several possible hierarchical architec-
tures have been considered based on the criteria for
defining a hierarchy.
One possibility is shown in figure 8 where higher
structural level is defined based on the position of
the cells within the architecture. Cells close to each
other form organ which is assumed to perform some
functionality based on the functionality of the cells
pertaining to it. Although such introduction of hi-
erarchies may seem somewhat trivial, it bears with
it possibilities for further improvement of adaptation
process: the role of sensing the environmental fluc-
tuation may be assigned to the organ instead of be-
ing performed by the cell; local control of adaptation
process may be performed by the organ; the number
of the cells pertaining to the organ may vary as the
adaptation process proceeds i.e. organ can grow and
shrink.
Further considerations with respect to this sys-
tem’s robustness may be addressed. Inclusion of the
information on the current state of adaptation process
into the dynamic formation of organs may increase
the system’s ability to avoid the dead state (state 2
in figure 5) i.e. increase its robustness according to
our definition. Moreover, the local control within the
organ may ensure that adaptation is achieved at the re-
gion which is critically affected by the environmental
fluctuation before this fluctuation takes effect on the
functionality of the system as a whole thereby pre-
venting it from loosing its functionality.
Figure 9: Schematic view of hierarchical architecture based
on the hormonal loops which arise upon the detection of
environmental fluctuation.
However, our results have also opened new way
of thinking with respect to the introduction of hierar-
chies see (Laketic and Tufte, 2009a). Let us assume
that higher hierarchical levels become ’visible’ only
after the fluctuation is detected. In figure 9, this idea
is schematically represented for the hormonal loops
which arise between functionally related cells. If
they, or similar formations, are considered higher hi-
erarchical level, then further question would be what
novel information they would contain. How would
this novel information affect system robustness?
5 DISCUSSION AND FURTHER
WORK
Autonomousadaptive systems which achieve stability
through processes analogous to the homeostatic pro-
cesses within the human body, show certain degree
of robustness to environmental fluctuations. In this
paper, we have presented some initial findings into
the adaptive processes within such systems. Through
simulations, we have shown how the achievement of
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
426

the system’s stability (or ultrastability to put it into the
words of W.R. Ashby (Ashby, 1960)) can lead to the
preservation of the system’s homeostasis. It can be
said that the achievement of stability corresponds to
the achievement of adaptation. In this way, the system
exhibits robustness to the environmental fluctuations
by preserving the stable state despite the variation in
environmental parameter(s).
However, many additional aspects of the adapta-
tion process may be considered so that the process
efficiency and system robustness are enhanced. One
thing would be inclusion of some long–term adaptive
process(es) in analogy to evolutionary processes, as
mentioned in section 3.1. Our work so far has as-
sumed that the architecture of the system is endowed
with adaptive mechanisms which are the result of the
coevolution with the environment. Then, we have set
to investigating these mechanisms. However, it might
be worth considering how some processes of evolu-
tionary nature could improve robustness. In this re-
spect, we think of addressing information within in-
dividual cells and the system as a whole and choosing
information content to be evolutionary unit. Further,
we have addressed possibilities for the hierarchical
organisation of the system under investigation. Such
considerations are justified by the living systems’ or-
ganisation. However, at this stage of our investiga-
tion, there is a number of issues that need be tackled.
The major ones consider the ’building’ of hierarchies
which, in this case, is not a trivial task. we argue that
in buildingup hierarchical organisationinto the model
more significance should be given to a choice of what
information should be exchanged between the hierar-
chical levels. Useful ideas for setting the framework
might be obtained from the work related to dynamical
hierarchies (Rasmussen et al., 2001).
Moreover, if not the structure but the patterns
formed are considered a higher hierarchical level, as
is the case with the hormonal loops formation shown
in previous work (Laketic and Tufte, 2009a), then new
aspects into the very nature of the phenomena arising
at the higher level may be questioned. Is it to be pre-
dicted from the operation of individual cells? Does
it contain some fundamental novelty? Our specula-
tion is that the answers may indicate emergent na-
ture of the phenomena arising upon the occurrence
of environmental fluctuation. Once the decisions on
the system’s hierarchical organisation are made, fur-
ther investigation into robustness of such systems will
be continued. Moreover, our intuition and common
sense tell us that absolute robustness does not exist.
We hope to show it and prove it within the framework
set for further simulations. With the great enthusiasm
we are looking forward to doing it.
REFERENCES
Ashby, W. R. (1960). Design for a Brain, the origin of adap-
tive behaviour. Chapman & Hall Ltd.
Eigen, M. and Schuster, P. (1979). The Hypercycle, a Prin-
ciple of Natural Self-Organisation. Springer-Verlag.
Ganti, T. (2003). Chemoton Theory Vol.2., Theory of Living
Systems. Kluwer Academic/Plenum Publishers.
Ganti, T., (contributor), J. G., and (contributor), E. S.
(2003). The Principles of Life. Oxford University
Press.
Laketic, D. and Haddow, P. (2007). Extreme temperature
electronics – from materials to bio–inspired adapta-
tion. In NASA/ESA Adaptive Hardware and Systems,
AHS 2007. IEEE Computer Society.
Laketic, D. and Tufte, G. (2009a). Adaptation in tissue sus-
tained by hormonal loops. In 10th European Confer-
ence on Artificial Life.
Laketic, D. and Tufte, G. (2009b). Living systems’ organ-
isation and processes for achieving adaptation. In In-
ternational Conference on Evolutionary Computation.
Laketic, D., Tufte, G., and Haddow, P. (2009). Stochas-
tic adaptation to environmental changes supported by
endocrine system principles. In NASA/ESA Adaptive
Hardware and Systems, AHS 2009, pages 215–222.
IEEE Computer Society.
Maturana, H. and Varela, F. (1973). Autopoiesis and Cog-
nition: the Realization of the Living. Dordecht: D.
Reidel Publishing Co.
Rasmussen, S., Baas, N., Mayer, B., Nilsson, M., and Ole-
sen, M. (2001). Ansatz for dynamical hierarchies. In
Artificial Life. Massachusetts Institute of Technology.
von Bertalanffy, L. (1973). General System Theory. George
Braziller, Inc., Revised edition, Fourth printing.
Walter, C. B. (1967). Wisdom of The Body. W.W.Norton
and Company, Inc, Copyright 1932.
ACHIEVING ROBUSTNESS IN ADAPTIVE SYSTEMS - Can Hierarchies Help?
427
