
KNOWLEDGE REPRESENTATION
An Ontology for Managing a Virtual Environment
Lydie Edward, Kahina Amokrane
Heudiasyc Laboratory UMR 6599 CNRS, University of Technology of Compi`egne, France
Centre de Recherches de Royallieu, 60200 Compi`egne, France
Domitile Lourdeaux, Jean-Paul Barth`es
Heudiasyc Laboratory UMR 6599 CNRS, University of Technology of Compi`egne, France
Keywords:
Ontology, Virtual environment for training, Multi-agent systems, Knowledge representation.
Abstract:
This paper presents an ontology developed in order to manage a virtual environment for risk prevention. This
ontology represents the objects composing the environment, the agents operating in the environment and the
events that can happened. In the virtual environment, different entities cohabit: virtual operators represented
by cognitive agents and the learner’s avatar that represents a real operator. They can interact with the objects.
It is therefore useful to have on one hand a managing system that well define the framework in which the
interactions or actions can be allowed and on the other hand a representation of the knowledge involve in
such interactions. To do this, we combine artificial intelligence and knowledge engineering to propose agent
COLOMBO. It is composed with the developed ontology and a set of reasoning rules.
1 INTRODUCTION
In our work we are interested in virtual environments
with enough credibility that offer human users an at-
tractive platform through which they can gain some
experience for training and decision-making (Edward
et al., 2007). For training and even more for decision-
making, it is necessary to reproduce the criteria/events
that are useful for the operator to decide (for example
if he does not close the gate properly we must have a
leak). We seek to model autonomous virtual charac-
ters interacting with avatars in such environments to
perform a task at a high-risk industrial plant and show
the results of their activity and the risks incurred. It
is therefore useful to have on one hand a world model
and a managing system and on the other hand a repre-
sentation of the knowledge involve in such interac-
tions. Above all existing approaches, we chose to
develop a world model using ontology. The goal of
creating such ontology is to allow users to have ac-
cess to various information (example: what are all
the actions possible on an object? What is the link
between object i and objet j). The representation of
the environment integrates knowledge on the objects
that composed the environment but also on the activ-
ity that agents or avatars have to realized. We com-
bine artificial intelligence and knowledge engineering
to propose agent COLOMBO
1
associated with an on-
tology that permits us to represent the working envi-
ronment (objects, agents), actions and events that can
happened in the environment. COLOMBO manages
the actions and interactions with the environment in
the way that it determines if an action is possible and
if all the conditions are satisfied to realize the action.
2 STATE OF THE ART
Kallmann proposed Smart Objects that integrate the
informationneeded for creating the character’sbehav-
iors. They provided information are oriented toward
the interaction between the characters and the objects
(Kallman, 2004). He distinguishes several types of
information: (i) intrinsic properties of the object (se-
mantic, physics), (ii) information on interaction (ac-
tions, positions, gestures), (iii) object behavior in re-
sponse of an interaction. In line with the research of
Kallman, Chevallier and Querrec proposed an exten-
sion of UML 2.1 model and developed a metamodel
1
French Translation : Ontological Creation linked to the
Modeling of the Objects
332
Edward L., Amokrane K., Lourdeaux D. and Barthès J. (2010).
KNOWLEDGE REPRESENTATION - An Ontology for Managing a Virtual Environment.
In Proceedings of the 2nd International Conference on Agents and Artificial Intelligence - Agents, pages 332-335
DOI: 10.5220/0002735903320335
Copyright
c
SciTePress

called VEHA
2
. VEHA is used for modeling semantic,
structural, geometrical and topological properties and
agents reactive behaviors (Chevaillier et al., 2009).
3 DEVELOPED ONTOLOGY
The approaches presented above are not sufficient for
our needs. The Smart Objects proposed by Kallmann
fill this lake but do not let the learner to do some er-
rors. The object behaviors are scripted and correct.
The UML approach gives a good framework to spec-
ify relations between objects and actions but it is not
a generic language. Furthermore, it does not gives us
the opportunity to add rules on objects. Thus, in our
approach, we chose ontology as an effective structure
for knowledge representation : “An ontology is an
explicit specification of conceptualization ” (Gruber,
1993). Noy and McGuinness defined an ontology as
a formal explicit description of concepts in a specific
domain, properties of each concept describing vari-
ous features and attributes of the concept and restric-
tions on properties (Noy and McGuinness, 2001). In
addition to these elements, an ontology may contain
different types of relations between its concepts.
Our domain knowledge is situated in the indus-
trial activity on SEVESO sites. To construct the on-
tology, we used knowledge provided by ergonomists.
In addition, knowledge concerning risks are provided
by experts of INERIS
3
. During the process of on-
tology creation we paid attention to be agree on the
vocabulary. The world domain is different from
the activity domain. We distinguished the ontol-
ogy that is made of the concepts (screw, gate, han-
dle) and the knowledge base that is composed with
the individuals or instances of the different concepts
(screw
0
5, gate
0
7, handle
0
2). We explain in the fol-
lowing the main concepts and relations of our ontol-
ogy (Figure 1).
3.1 Main Concepts
• Object-V3S
The main components of the environment are
the objects. They are represented in the ontol-
ogy by the root concept “Object-V3S” (Figure
2). There is also subconcepts such as: opening-
object (valve, door), container-object (toolbox,
cupboard), tools (screwdriver, hammer, Swiss
army knife). Each real object in the environment
is represented by an instance in the knowledge
2
Virtual Environment supporting Human Activities
3
Industrial Environment and Risk National Institute
base. During a working session, the state of a
given object may change from a value to another
(opened, shut, taken) and its decay characteris-
tic (normal, rusted, broken) may change also, and
thus we added respectively the attributes “state”
and “status”. At each moment, an object has one
or several states but only one status. An object is
also described by its position and its orientation
in the world. We distinguish several categories of
objects according to their function and utility. If
the object is linked to another object (i.e a door
and its handle) we called it a cognitive object oth-
erwise it is a reactive object.
• Action-V3S
Each autonomous agent or learner may perform
one or more tasks on objects in the virtual environ-
ment. We have thus added the “Action-V3S” con-
cept that represents all the actions that can be per-
formed in the environment(open, close, unscrew).
These actions are classified according to the ob-
jects on which they can be applied. We have for
example the subconcepts: valve-action, loading-
arm-action. This distinction is useful to abstract
the relations between concepts. During the exe-
cution of an action, it changes from one state to
another. It can be current (active), awaiting (pend-
ing), ended (finished) or in failure (failed).
• Agent
To represent the work team (team leader, operator,
manager) at a site, we added the “Agent” concept.
Team members are represented by autonomous
virtual agents and the avatar of the learner in the
virtual environment. We have different categories
of agents according to their function. It corre-
sponds to the following subconcepts: Operator,
Manager and Project Manager. An agent has a po-
sition and orientation in the environment, a tool-
box containing its tools and an equipment box
with its protection clothes.
3.2 Ontology Relations
In addition to the classical subsumption relation be-
tween concepts, we enriched our ontology with other
(horizontal) relations. We describe below some of
these relations :
• “has-main-resource” relation between an action
and an object. It specifies the appropriated objects
needed to realize the action. For example, the ac-
tion ”loosen” on the object ”screw” has for main
resource the object ”screwdriver”.
• “has-secondary-resource” relation between an ac-
tion and an object. It specifies the other objects
KNOWLEDGE REPRESENTATION - An Ontology for Managing a Virtual Environment
333
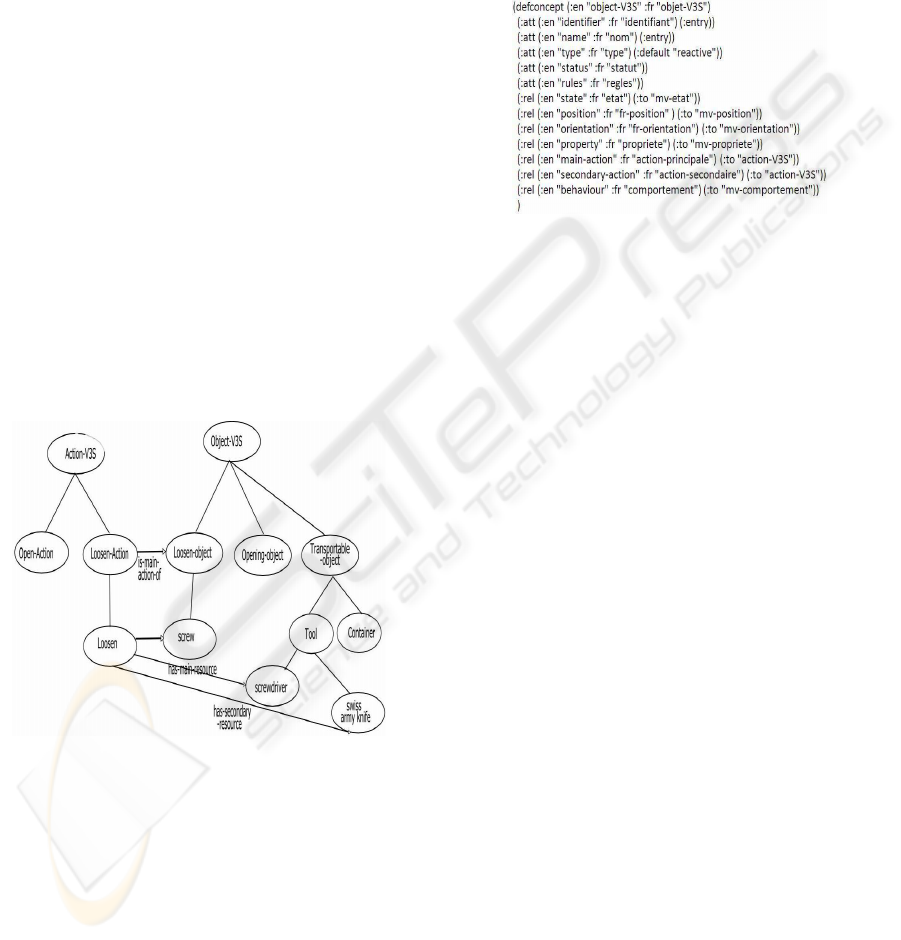
that can be used to realize the action. For exam-
ple, the action ”loosen” on the object ”screw” has
for secondary resource a sort of screwdriver such
as a ”Swiss army knife”.
• “has-target” relation between an action and an ob-
ject. It means the instance of the object concerned
by the action.
• “has-main-action” : relation between an action
and an object. Main actions are the tools main
function (i.e screwdriver : unscrew, screw).
• “has-in-hand” : relation between an agent and an
object. It specifies which tools are in the agent
hand.
The relation has-secondary-resource between an
object and an action is created automatically at the
loading of the knowledge base. We added a rule-
based system that identifies according to certain con-
straints, the objects to link with an action. For exam-
ple all the objects with a certain weight and geometry
will be secondary-resource-of the action knock. The
rules are specifically based on the objects properties.
This system is very helpful to maintain the ontology.
If we add some new concepts, with their attributes and
properties we do not need to specify for which action
they can be secondary resource.
Figure 1: Ontology.
3.3 Implementation
Our ontology has been constructed with MOSS
(Barth`es, 2009), a modeling language implemented
with the Lisp language. MOSS has a powerful engine
that permits to access to the entire ontology and the
knowledge base through simple or complex queries.
The query system takes a formal query as input, fo-
cusing on a particular concept : the question ”Per-
sons whose name is Dupond” gives the query (”per-
son” (”name” :is ”Dupond”)). It then computes a set
of possible candidates, and tries to validate each can-
didate in turn. Creating a concept is simple and can
be done with the defconcept macro as follows: (de-
fconcept ”Gate”). MOSS objects have two kinds of
properties: immediate values that qualify the object,
and links to other objects. The first kind is called an
attribute (:att), the second kind is called a relationship
or relation (:rel).
Figure 2: Concept Object-V3S.
4 RULES
We do not aim at only describing the objects and
actions. But we want to let the learner and the
autonomous agents to do some errors (pedagogical
choice). But we avoid the errors that can not be done
in real life. For example to unscrew with a hammer.
It is not possible. Thus, if the learner or the agent
decides to do an action, it does not mean that the ac-
tion will be done. For example, if the agent wants to
close the gate and the gate is already closed, the ac-
tion will not be done (no changing state). Thus we
add information into the objects and also into the ac-
tion in order to manage how an object can change its
state and when an action can be executed. We distin-
guish two kind of objects, reactive objects (screw) and
cognitive objects (loading-arm). The reactive objects
are just like reactive agent, they respond directly to a
certain stimuli (an action). For example, if the learner
decides to unscrew the screw, the result of the action
will not depend on other parameters than the con-
cerned object state. The cognitive objects are more
complex as cognitive agents (Demazeau, 1995) (Fer-
ber, 1995). For example, let us take the loading-arm.
There is a link called ”connect” between the concept
loading-arm and the concept gate. In order to remove
the loading-arm, we have to be sure that the loading-
arm’s handle is turned and that the appropriated gate
is unlocked. To manage these different situations, we
add two kind of rules into the cognitive objects and
into the actions : execution rules and transition rules.
• Execution rules
ICAART 2010 - 2nd International Conference on Agents and Artificial Intelligence
334

In response to the agent or learner actions the en-
vironment should be able to respond correctly. If
the agent wants to do an action we need to know if
this action is possible. This role is done by agent
COLOMBO. When the agent or the learner wants
to do an action, COLOMBO receives a query.
Then it verifies the execution rules linked to the
action (Figure 3). If the conditions are satisfied
then the action is possible and an animation is
started in the environment.
Figure 3: Concept action unscrew.
• Transition rules
The transition rules are the conditions that permit
an object to change its state. They are stored in the
object concept (Figure 4). As we said above, the
realization of an action does not necessary implies
that the target object change its state. Thus, only
if they transition rules are satisfied, COLOMBO
sets the new value of the object state.
Figure 4: Concept object loading-arm.
5 CONCLUSIONS
In this paper we present the development of an ontol-
ogy for managing a virtual environment. Our ontol-
ogy is not only a formal description of the concepts
of a domain but we also aim at building a intelligent
system that decides : (i) if the action is possible, (ii)
if the object can change its state. To reach this goal,
we proposes two kind of rules : (i) execution rules
defined in the action concept and (ii) transition rules
defined in the cognitive object concept. The next step
of our work will be to enrich the system and to found
solutions for the maintenance of the ontology.
ACKNOWLEDGEMENTS
Authors want to thank the ergonomists of the Univer-
sity of Paris Descartes; INERIS for providing the nec-
essary information. We also thank the persons who
worked with us on the development of the ontology
and the virtual environment.
REFERENCES
Barth`es, J.-P. (2009). OMAS - A Flexible Multi-Agent En-
vironment for CSCWD. CSCWD.
Chevaillier, P., Querrec, R., and Septseault, C. (2009). Veha
: Un m´eta-mod`ele d’environnement virtuel inform´e
et structur´e. Revue des Sciences et Technologies de
l’Information, s´erie Techniques et Sciences Informa-
tiques (RSTI-TSI).
Demazeau, Y. (1995). From interactions to collective be-
haviour in agent-based systems. European Conference
on cognitive sciences.
Edward, L., Lourdeaux, D., Lenne, D., Barth`es, J.,
Burkhardt, J., and Camus, F. (2007). V3S: A Training
and Decision Making Tool to Model Safety Interven-
tions on SEVESO Sites. VRIC.
Ferber, J. (1995). Les syst`emes multi-agents - vers une in-
telligence collective. Paris : InterEditions.
Gruber, T. (1993). A translation approach to portable on-
tology specifications. Knowledge acquisition, 5:199–
220.
Kallman, M. (2004). Interaction with 3-d objects. In
Magnenat-Thalmann, N. and Thalmann, D. editors,
Handbook of Virtual Humans, chapter 13, pages
303322.
Noy, N. and McGuinness, D. (2001). Ontology develop-
ment 101 : A guide to creating your first ontology.
Technical Report KSL-01-05 and SMI-2001-0880.
KNOWLEDGE REPRESENTATION - An Ontology for Managing a Virtual Environment
335
