
INVARIANT CATEGORISATION OF POLYGONAL OBJECTS
USING MULTI-RESOLUTION SIGNATURES
Roberto Lam
Instituto Superior de Engenharia, Universidade do Algarve, Campus da Penha, Faro, Portugal
J. M. Hans du Buf
ISR-Vision Laboratory, FCT, Universidade do Algarve, Campus de Gambelas, Faro, Portugal
Keywords:
3D Shape matching, Volumetric models, Manifold meshes.
Abstract:
With the increasing use of 3D objects and models, mining of 3D databases is becoming an important issue.
However, 3D object recognition is very time consuming because of variations due to position, rotation, size
and mesh resolution. A fast categorisation can be used to discard non-similar objects, such that only few
objects need to be compared in full detail. We present a simple method for characterising 3D objects with
the goal of performing a fast similarity search in a set of polygonal mesh models. The method constructs,
for each object, two sets of multi-scale signatures: (a) the progression of deformation due to iterative mesh
smoothing and, similarly, (b) the influence of mesh dilation and erosion using a sphere with increasing radius.
The signatures are invariant to 3D translation, rotation and scaling, also to mesh resolution because of proper
normalisation. The method was validated on a set of 31 complex objects, each object being represented with
three mesh resolutions. The results were measured in terms of Euclidian distance for ranking all objects, with
an overall average ranking rate of 1.29.
1 INTRODUCTION AND
RELATED WORK
One might say that technological developments will
lead us towards using increasingly complex illustra-
tions, i.e., moving from 2D to 3D space. There are
digital scanners which produce 3D models of real ob-
jects. CAD software can also produce 3D models,
from complex pieces of machinery with lots of cor-
ners and edges to smooth sculptures. Very complex
protein structures play an important role in pharma-
cology and related medical areas. Many actors in the
World Wide Web have started to incorporate 3D mod-
els in sites and home pages. As a consequence of
this trend, there is a strong interest in methods for 3D
similarity analysis (Bustos et al., 2005; Tangelder and
Veltkamp, 2007). Similarity analysis is a fast way to
discard many irrelevant objects from a database, i.e.,
before precise object recognition (matching) which
may be very time consuming because of all variations
that may occur: different position (object origin), ro-
tation, size and also mesh resolution.
Similarity analysis does not require precise shape
comparisions, global nor local. Instead, this approach
is based on computing sets of features (FV or feature
vector) of a query object and comparing its FV with
all FVs of known objects in a database. The FVs can
be obtained by a variety of methods, from very sim-
ple ones (bounding box, area-volume ratio, eccentric-
ity) to very complex ones (curvature distribution of
sliced volume, spherical harmonics, 3D Fourier coef-
ficients) (Saupe and Vranic, 2001; Pang et al., 2006;
Sijbers and Dyck, 2002). We mention two approaches
which are related to our own approach. Assfalg et
al. (2006) projected a 3D object onto 2D curvature
maps. This is preceded by smoothing and simplifica-
tion of the polygonal mesh, and final retrieval is based
on comparing the 2D curvature maps. Chuang et al.
(1991) and Suzuki (2007) used the fractal dimension
for characterising 3D objects.
The intrinsic nature of the objects may pose
some constraints, and some methods may be more
168
Lam R. and M. Hans du Buf J. (2009).
INVARIANT CATEGORISATION OF POLYGONAL OBJECTS USING MULTI-RESOLUTION SIGNATURES.
In Proceedings of the International Conference on Knowledge Discovery and Information Retrieval, pages 168-173
DOI: 10.5220/0002301401680173
Copyright
c
SciTePress
suitable—and faster—for the extraction of FVs than
others. For example, methods based on spherical har-
monics and 3D Fourier coefficients are not suitable
for concave objects (non-star-shaped), whereas other
methods have problems with open (non-closed) ob-
jects. Some limitations can be solved by combin-
ing two or more methods. However, since many ob-
jects can yield very similar FVs by applying only one
method, i.e., mathematically possibly an infinite num-
ber of objects, normally several methods are com-
bined to achieve the best results.
2 OVERVIEW OF OUR
APPROACH
We use a set of 31 models, each one represented with
four different mesh resolutions. The models were se-
lected from the (AIM@SHAPE, 2008) database. This
database has high-definition objects which can be
converted to other mesh resolutions by means of one
parameter between 9.9 (max mesh size) and 5.5 (min
mesh size). The models were downloaded in PLY
format and only “watertight” ones—closed, without
gaps and with regular meshes—were selected. Fig-
ure 1 shows a few examples, and Table 1 a list of all
objects with their mesh resolutions: the first three res-
olutions are used for creating the training set FVs, the
fourth one as test object for similarity search.
In order to obtain invariance to translation and
scale (size), the models were normalised to the uni-
tary sphere (radius 1.0) after the origin of the models
was translated to the center of the sphere. Rotation in-
variance is achieved by the fact that our FV is global
to the model as proven in (Vrani´c, 2004). Invariance
to mesh resolution is obtained by proper feature nor-
malisations, which will be explained below. We ap-
ply two different but complementary methods in order
to generate two kinds of features for object retrieval.
These are based on mesh smoothing (Section 2.1) and
on dilation and erosion (Section 2.2).
2.1 Mesh Smoothing
Mesh smoothing serves to reduce noise, for example
for decreasing the mesh size by re-triangulation of
planar areas. (Glendinning and Herbert, 2003) used
smoothing of principal components for shape classi-
fication in 2D. Here, the idea is related to iterative
and adaptive (nonlinear) mesh smoothing in 3D, i.e.,
smoothing in quasi-planar regions but not at sharp
edges (Lam et al., 2001). However, here we simply
apply the linear version which will smooth the mesh
Table 1: All 31 models with their mesh resolutions, the last
resolution was used in similarity search.
N Model Resolutions
1 Blade 6.5; 7.5; 9.9; 8.0
2 Bimba 6.0; 8.5; 9.5; 8.0
3 Block 5.0; 6.5; 8.0; 8.5
4 Bunny 6.5; 7.5; 9.9; 8.0
5 Cow 6.0; 6.4; 9.9; 7.1
6 Cow2 6.0; 7.5; 9.9; 8.9
7 DancingChildren 6.0; 7.5; 9.9; 6.8
8 Dragon 6.0; 8.0; 9.5; 7.7
9 Duck 6.0; 7.5; 9.9; 6.7
10 Eros 6.0; 7.5; 9.9; 6.5
11 Fish 6.0; 7.5; 8.0; 8.0
12 FishA 6.0; 7.5; 9.9; 7.0
13 GreekSculpture 6.5; 7.0; 7.7; 8.5
14 IsidoreHorse 6.0; 7.5; 9.9; 7.0
15 Mouse 6.0; 7.5; 9.9; 7.8
16 Pulley 6.0; 7.5; 9.9; 7.0
17 Torso 6.0; 7.5; 9.9; 7.7
18 CamelA 6.0; 7.5; 9.9; 7.8
19 Carter 6.0; 8.5; 9.5; 7.3
20 Chair 6.5; 7.5; 9.9; 6.9
21 Dancer 6.0; 7.5; 99; 7.7
22 Dente 6.0; 7.5; 9.9; 7.0
23 Elk 6.0; 7.5; 9.9; 7.9
24 Grayloc 6.0; 7.5; 9.9; 7.8
25 Horse 6.0; 7.5; 9.9; 8.0
26 Kitten 6.0; 7.5; 9.9; 7.3
27 Lion-dog 6.0; 7.5; 9.9; 8.0
28 Neptune 6.0; 8.0; 9.5; 7.6
29 Ramesses 6.0; 7.5; 9.9; 8.0
30 Rocker 6.0; 7.5; 9.9; 7.1
31 Squirrel 6.0; 7.5; 9.9; 7.2
at all vertices: it starts by eliminating very sharp ob-
ject details like in- and protruding dents and bumps,
and then, after more iterations, less sharp details. The
sum of the displacements of all vertices, in combi-
nation with the contraction ratio of the surface area,
generates a quadratic function which can characterise
the model quite well.
If V
i
,i = 1, N, is the object’s vertex list with as-
sociated coordinates (x
i
,y
i
,z
i
), the triangle list T(V)
can be used to determine the vertices at a distance of
one, i.e., all direct neighbour vertices connected to V
i
by only one triangle edge. If all neighbour vertices
of V
i
are V
i, j
, j = 1,n, the centroid of the neighbour-
hood is obtained by
¯
V
i
= 1/n
∑
n
j=1
V
i, j
. Each vertex
V
i
is moved to
¯
V
i
, with displacement
¯
D
i
= ||V
i
−
¯
V
i
||.
The total displacement is D =
∑
N
i=1
¯
D
i
. The en-
tire procedure is repeated 10 times, because we are
mainly interested in the deformation of the object at
INVARIANT CATEGORISATION OF POLYGONAL OBJECTS USING MULTI-RESOLUTION SIGNATURES
169
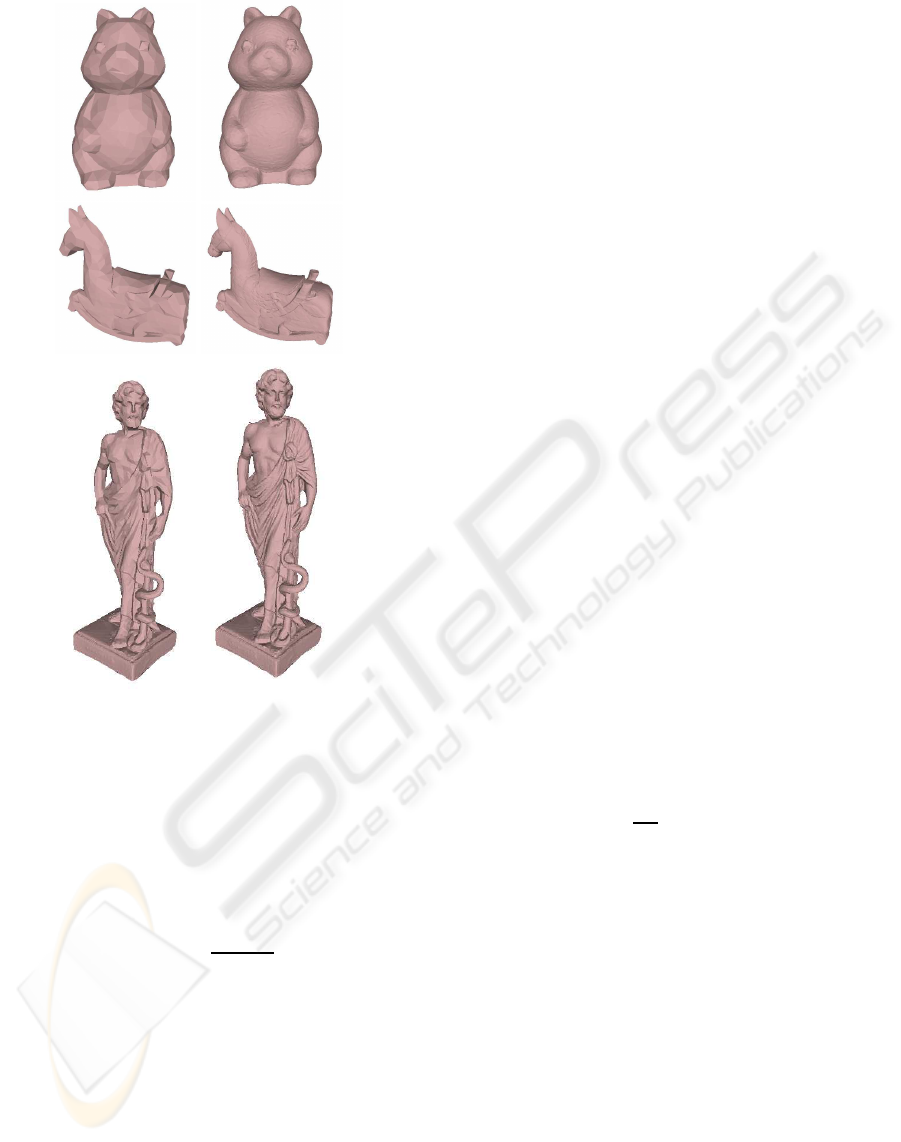
Figure 1: Examples of models: Squirrel (top), IsidoreHorse
(middle) and GreekSculpture (bottom). Low resolutions at
left and high ones at right.
the start, when there still are many object details,
and more iterations do not add useful information
anymore. Hence, displacements are accumulated by
A
l
=
∑
l
m=1
D
m
with m = 1...10. In order to obtain
invariance to mesh size, in each iteration m the dis-
placement D
m
is corrected using
D
m
:= D
m
·
NP
m
· N
A
10
· S
m
, (1)
with N the total number of vertices, NP
m
the number
of participating vertices (in non-planar regions which
contributed to the displacement), S
m
the surface of the
object (sum of all triangles) after the smoothing step,
and A
10
the final, maximum accumulated displace-
ment after all 10 iterations. Then the curve of each
object and each mesh resolution is further normalised
by the total contraction ratio defined by S
10
/S
0
(final
surface and original surface), and the three curves (10
data points) are averaged over the three mesh resolu-
tions. In the last step, the averaged A
l
is least-squares
approximated by a quadratic polynomial in order to
reduce 10 parameters to 3. Figure 3 shows represen-
tative examples of curves A
l
. It should be stressed
that, in contrast to the second method as described be-
low, no re-triangulation of the mesh of the object after
each iteration is done, i.e., the number of vertices—
and triangles—remains the same. Figure 2 shows a
model and the influence of mesh smoothing.
2.2 Mesh Dilation and Erosion
The second method is based on the estimation of the
3D fractal dimension by applying a sphere as struc-
tural element with increasing radius. A sphere is ap-
plied to the model, its origin being placed at each
vertex. This yields two surfaces: the dilated surface
grows and the eroded one shrinks as a function of
sphere radius, both showing less object detail. In-
stead of computing the fractal dimension, we com-
pute the volume between the two surfaces as a func-
tion of sphere radius in order to obtain characteristic
curves, like the ones described in the previous sec-
tion, for characterising the objects. The growth (in-
creasing radius) of the sphere is related to the mesh
resolution of the model. Therefore, before comput-
ing the volumes, we eliminate vertices which are in-
side the neighbourhooddefined by the sphere with the
radius used in the dilation-erosion process. If ∆L is
the difference between the maximum and minimum
edge lengths of a model, i.e., ∆L = L
max
− L
min
, then
∆R = 0.05∆L. Hence, the radius at iteration m is
R
m
= m∆R, which results in volumes V
0
(the volume
of the original model) andV
m
(the volume between di-
lated and eroded models at iteration m). For obtaining
invariance to mesh size, we apply
V
m
:= V
m
·
V
0
R
m
; m = 1,2,... (2)
As can be seen in Fig. 4, the dilation-erosion curves
are quite similar, for different mesh resolutions, at the
start of the process, but then start to diverge when the
radius becomes too big and noise is introduced to the
model. Therefore we averaged the V
m
of the three
mesh resolutions and only included in the FV two pa-
rameters: V
0
and V
2
. Figure 5 shows the Bimba model
with erosion and dilation.
3 RESULTS AND DISCUSSION
The 31 models listed in Table 1 were used, each
with four mesh resolutions. As explained before,
the first three mesh resolutions were used for con-
structing the FV of the model, and the last one was
used for testing. Each model was characterised by
KDIR 2009 - International Conference on Knowledge Discovery and Information Retrieval
170
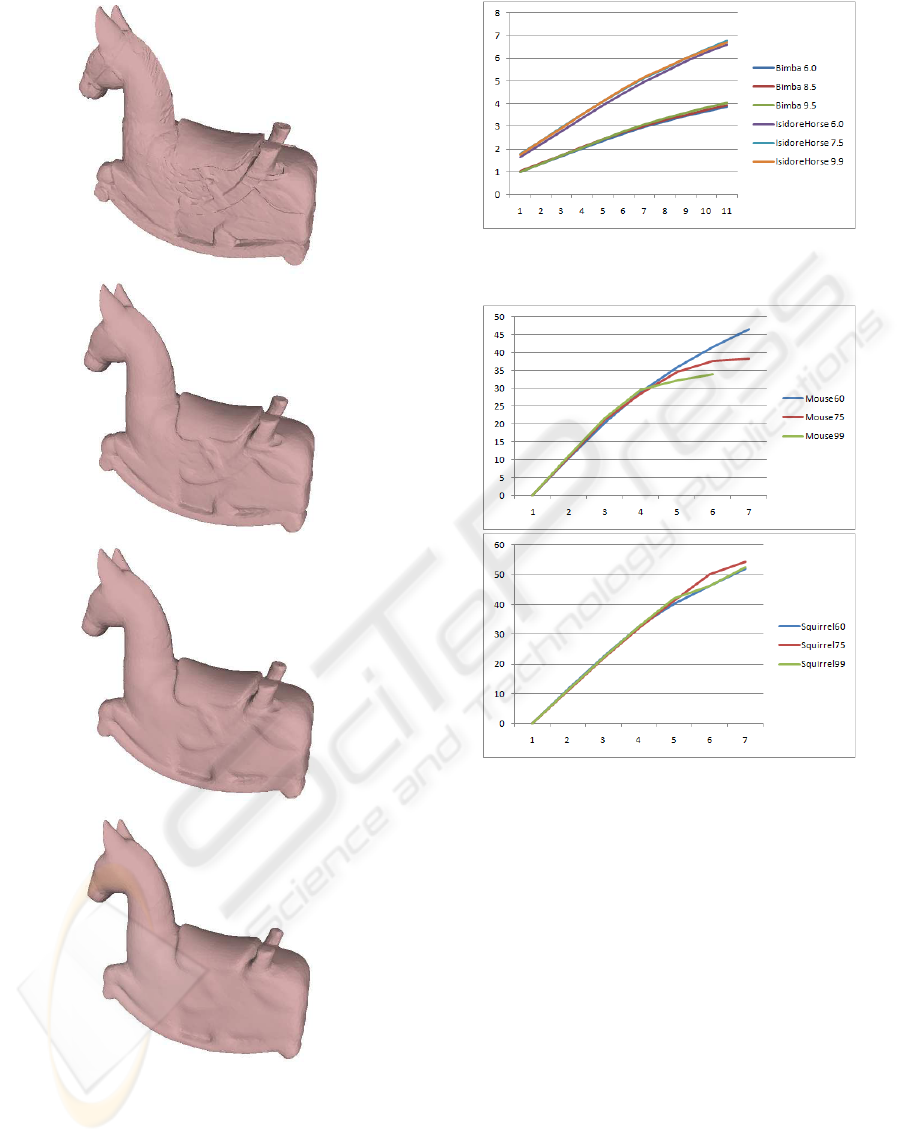
Figure 2: Mesh smoothing applied to IsidoreHorse. From
top to bottom: original and smoothed meshes after 3, 6 and
10 iterations.
7 parameters, 5 from the method described in Sec-
tion 2.1 (surface of original model after normalisation
to unit sphere; contraction ratio after 10 iterations;
3 coefficients of the quadratic approximation of the
Figure 3: Characteristic curves from mesh smoothing of the
Bimba and IsidoreHorse models.
Figure 4: Characteristic curves from mesh dilation and ero-
sion of the Mouse and Squirrel models.
smoothing curves), and 2 from Section 2.2 (volume
of original model after normalisation to unit sphere;
volume between dilated-eroded surfaces after 2 itera-
tions). The FVs of the objects’ test resolutions were
compared with all FVs of the database, and the ob-
jects were sorted by using the Euclidean distance be-
tween the FVs. Table 2 lists the results, starting with
the object with the smallest distance, then the object
with the next smallest distance, and so forth, until the
fifth object. Table 2 shows that in 26 of 31 cases
the correct object was ranked first. Similar objects
(IsidoreHorse, 14; CamelA, 18; Horse, 25) were al-
ways ranked at position 1 to 3. The average ranking
rate R = (1/31)
∑
31
i=1
P
i
, where P
i
is the ranked posi-
tion of object i, is 1.29. This means that the majority
of objects is ranked at position 1 or 2, at least within
the first 3 or 5 positions for narrowing a full object
comparison in a big and complex database. It should
INVARIANT CATEGORISATION OF POLYGONAL OBJECTS USING MULTI-RESOLUTION SIGNATURES
171
Figure 5: Mesh dilation and erosion applied to the Bimba
model. From top to bottom: original plus eroded and dilated
models after 4 iterations.
be stressed that, although 26 objects were ranked first,
this does not mean that the correct object has been
identified. The most similar object may have been de-
tected, but in real conditions, i.e., with big and com-
plex databases like protein structures, the search has
been narrowedin order to save time for detailed object
comparisons. Future work involves improving further
the methods described in this paper, but in relation to
detailed object comparisons which may provide addi-
tional parameter models for a similarity search. Most
important is to improve the erosion-dilation method
such that identical curves are obtained for different
object resolutions at larger sphere radii, after which
the relative importance of the individual features and
feature sets can be studied.
Table 2: Results.
N Testing Model Ordered output
1 Blade 1-6-30-22-12
2 Bimba 2-26-31-22-15
3 Block 3-27-9-15-31
4 Bunny 4-7-23-14-25
5 Cow 12-5-6-17-11
6 Cow2 6-12-30-22-1
7 DancingChildren 7-4-23-14-10
8 Dragon 8-31-23-9-2
9 Duck 9-31-15-8-2
10 Eros 18-25-10-14-26
11 Fish 11-6-12-1-30
12 FishA 12-6-1-5-11
13 GreekSculpture 13-28-20-17-5
14 IsidoreHorse 14-25-18-10-26
15 Mouse 15-31-9-22-2
16 Pulley 16-24-19-3-9
17 Torso 17-5-12-20-6
18 CamelA 25-18-14-10-26
19 Carter 19-24-16-8-9
20 Chair 20-17-5-12-1
21 Dancer 11-12-5-6-21
22 Dente 22-26-30-2-6
23 Elk 23-7-4-14-8
24 Grayloc 24-19-16-8-9
25 Horse 25-14-18-10-26
26 Kitten 26-2-22-10-30
27 Lion-dog 27-3-9-15-17
28 Neptune 28-21-5-20-17
29 Ramesses 29-10-14-4-7
30 Rocker 22-30-26-2-6
31 Squirrel 31-15-9-2-22
ACKNOWLEDGEMENTS
We would like to thank the author of Binvox software,
Patrick Min. Binvox was used in order to compute the
volume of the models.
Research supported by the Portuguese Foundation
for Science and Technology (FCT), through the pluri-
annual funding of the Inst. for Systems and Robotics
through the POS Conhecimento Program (includes
FEDER funds), and by the FCT project SmartVision:
active vision for the blind (PTDC/EIA/73633/2006).
KDIR 2009 - International Conference on Knowledge Discovery and Information Retrieval
172

REFERENCES
AIM@SHAPE. (2008). http://www.aimatshape.net
Assfalg, J., Del Bimbo, A. and Pala, P. (2006). Content-
based retrieval of 3D models through curvature maps:
a CBR approach exploiting media conversion. Multi-
media Tools Appl., 31(1):29–50.
Bustos, B., Keim, D. A., Saupe, D., Schreck, T. and Vrani´c,
D.V. (2005). Feature-based similarity search in 3D
object databases. ACMComput. Surv., 37(4):345–387.
Chuang, K., Valentino, D. and Huang, H. (1991). Measure-
ment of fractal dimension using 3-D technique. Proc.
SPIE, Vol 1445,:341-34.
Glendinning, R.H. and Herbert, R.A. (2003). Shape classi-
fication using smooth principal components. Pattern
Recognition Letters, 24(12):2021-2030.
Lam, R., Loke, R. and du Buf, H. (2001). Smoothing and
reduction of triangle meshes. Proc. 10th Portuguese
Computer Graphics Meeting, 97–105.
Pang, M., Wenjun, D., Gangshan, W. and Fuyan, Z. (2006).
On volume distribution features based 3D model re-
trieval. Proc. Advances in Artificial Reality and Tele-
Existence ICAT, LNCS Vol. 4282, 928–937.
Saupe, D. and Vrani´c, D.V. (2001). 3D model retrieval with
spherical harmonics and moments. Proc. DAGM Sym-
posium, 392–397.
Sijbers, J. and Dyck, D.V. (2002). Efficient algorithm for
the computation of 3D Fourier descriptors. Proc. Int.
Symp. 3D Data Processing Visualization and Trans-
mission, 640–643.
Suzuki, M. (2007). A three dimensional box counting
method for measuring fractal dimension of 3D mod-
els. Proc. 11th IASTED Int. Conf. on Internet and
Multimedia Systems and Applications, PID:577-082.
Tangelder, J. and Veltkamp, R. (2007). A survey of content
based 3D shape retrieval methods. Multimedia Tools
and Applications, 441–471.
Vrani´c D.V. (2004). 3D Model Retrieval. Ph.D. Thesis
University of Leipzig.
INVARIANT CATEGORISATION OF POLYGONAL OBJECTS USING MULTI-RESOLUTION SIGNATURES
173
