
FALL DETECTOR BASED ON NEURAL NETWORKS
Rubén Blasco, Roberto Casas, Álvaro Marco, Victorián Coarasa, Yolanda Garrido and Jorge L. Falcó
Instituto de Investigación en Ingeniería de Aragón, Universidad de Zaragoza, María de Luna 1, Zaragoza, Spain
Keywords: Fall detector, neural networks, ZigBee, wearable sensors, pattern recognition.
Abstract: Falls are one of the biggest concerns of elderly people. This paper addresses a fall detection system which
uses an accelerometer to collect body accelerations, ZigBee to send relevant data when a fall might have
happened and a neural network to recognize fall patterns. This method presents improved performance
compared to traditional basic-threshold systems. Main advantage is that fall detection ratio is higher on
neural network based systems. Another important issue is the high immunity to events not being falls, but
with similar patterns (e.g. sitting in a sofa abruptly), usually confused with real falls. Minimization of these
occurrences has big influence on the confidence the user has on the system.
1 INTRODUCTION
Aging of population is a well-known problem in
developed countries. Nowadays, elderly people (+65
years old) represents in Spain more than 16% of the
population (Eurostat, 2007). Falls are one of the
major fears of the elderly and their relatives. Indeed,
some authors estimate the amount of falls of people
aged over 75 to be at least 30 percent per year
(Sixsmith and Johnson, 2004). In the end, people’s
concern about falls and whether there will be
someone there to help them in case of an emergency,
prevent them to age at home (Rodriguez et al, 2005).
As a result, people have to move to residences,
usually causing negative effect in their health and
happiness and resulting in high costs to the
individual, their family or the Social Welfare
System.
Fortunately, many initiatives are going on in
order to increase the time people can stay at home.
We will further see many fall detection systems
enabling people to receive quickly assistance even
when they are not able to request the assistance by
themselves (e.g. immobilized or unconscious). Also,
combination of these systems with telemedicine
allows closer monitoring or collaboration of various
experts in the diagnoses (Tunstall web, 2007).
Various methods have been described in order to
detect falls in the elderly. Those based in a sensing
infrastructure - infrared cameras (Alwan, et al.,
2006), vision systems (Williams et al., 1998) or
smart floors (Williams et al., 1998) - can be hardly
used in many cases. We find wearable systems more
appropriated in real scenarios because people refuse
to have cameras everywhere in their homes and
systems are much more expensive.
Inertial elements are mostly used for mobile
monitoring, but still the perfect detector does not
exist. Main reason is the difficulty in modelling a
fall, it can happen in many different ways; it will not
always be the typical big impact followed by
inactivity and horizontality. Williams et al. use a
shock sensor and a tilt switch to measure the
inclination after the impact (Williams et al., 1998).
Doughty et al. also use two sensors to perform the
same two-stage-analysis (Doughty et al, 2000),
which moreover is concreted in a commercial gadget
from Tunstall (Nait-Charif and McKenna, 2004).
Noury refines the procedure using an accelerometer
to detect the shock, also a tilt switch, and adding a
vibration sensor to estimate the physiological
activity (Noury, 2002). Of course, the more
variables measured, the more accurate the detection
can be, but also the more complicated and expensive
the hardware will be. Many actual works propose
just using accelerometers to carry out the full
detection (Noury, 2002; Degen et al, 2005; Chen et
al., 2005). Main reasons are their low power
consumption, reduced cost and versatility detecting
different events -shocks, inclination and activity-.
The devices presented in these works perform
satisfactory fall detection: more of 80% of falls are
correctly detected (Noury, 2002).
540
Blasco R., Casas R., Marco Á., Coarasa V., Garrido Y. and L. Falcó J. (2008).
FALL DETECTOR BASED ON NEURAL NETWORKS.
In Proceedings of the First International Conference on Bio-inspired Systems and Signal Processing, pages 540-545
DOI: 10.5220/0001066205400545
Copyright
c
SciTePress
2 SYSTEM DESCRIPTION
Users must find fall detection systems trust-worthy
and efficient in order to use them. Systems which
detect all falls but generate many false alarms make
users unconfident about it. Moreover, if we consider
the difficulty of distinguishing between some kind of
falls and ordinary movements in elderly people’s
life, threshold systems (those that generate an alert
when acceleration rise above a fixed value) become
not be reliable enough (Noury, 2002).
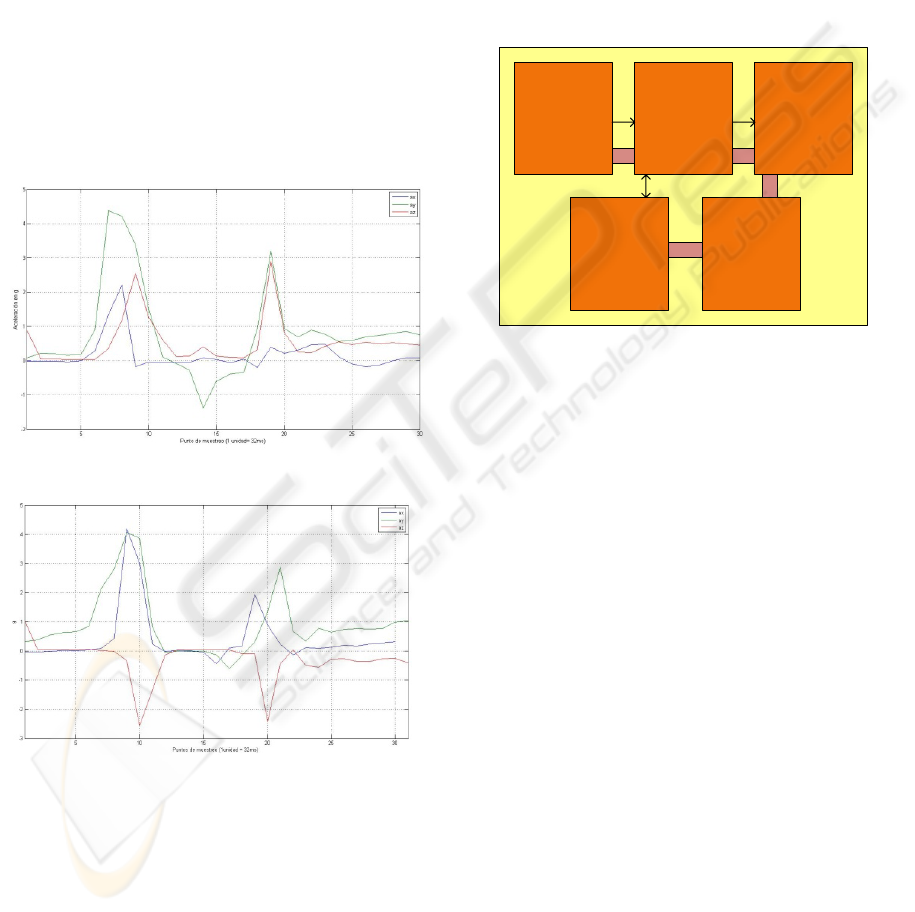
Figure 1.a. shows tri-axial acceleration when a
person has a sideward fall. On the other hand, Figure
1.b. shows accelerations when a person sits down on
a sofa abruptly. Both figures were obtained with a
device which measures triaxial accelerations, hanged
around the neck.
Figure 1a: Acceleration in three axes in a sideward fall.
Figure 1b: Acceleration in three axes while sitting abruptly
in a sofa.
As we can see, both figures have similar
acceleration peaks being also the shapes pretty
similar.
Our solution aims to distinguish falls from
movements that have similar acceleration patterns
not being falls using neural networks; that is to say,
separate occurrences into true and false falls.
2.1 Blocks Diagram
The fall detector consists of a mobile device with an
inertial sensor which is able to communicate through
a ZigBee network. The system also needs a
computer that analyzes data using a neural network.
Figure 2 shows the portable device blocks: battery,
sensor, microcontroller (µC), interface and Zigbee
transceiver. Reduced size and low power
consumption had been considered in the design
process of every block.
Vbat
Sensor
BATTERY
uC Transceiver
INTERFACE
Vbat
Vbat
Figure 2: Blocks of the portable device.
The chosen sensor is MMA7260Q Freescale
accelerometer because of its wide input voltage
range (2,2 V - 3,6 V), current consumption (typically
less than 500 µA and 3 µA in sleep mode) and
reduced size (6x6x1,45mm). It also has three analog
outputs that give the acceleration value in axis X, Y
and Z. Its sensitivity is configured digitally into
some ranges (1,5 g; 2 g; 4 g or 6 g). As some falls
are above 4 g, our application uses the maximum
range (6 g) and minimum sensitivity (200 mV/g).
The chosen microcontroller is Microchip’s
PIC16F688. It has eight A/D channels that can be
configured to 10 bits. As well as working within a
wide voltage supply range (2 V - 5,5 V), it also has
very low current consumption (800 µA in active
mode and 1 nA while sleeping).
Regarding communications, we discarded the
development of a proprietary network for
interoperability reasons. Other standard wireless
protocols such as Bluetooth or WiFi consume too
much energy as they are intended for higher data
rates. We decided to use ZigBee because its
adequate data rate (250 kbps), security (128 bits
AES encryption), low latency (30 ms to join and 15
ms to access the network) and energy efficiency. Its
interoperability with other potential applications
(home control and automation), future projection of
FALL DETECTOR BASED ON NEURAL NETWORKS
541
the protocol, and its consequent cost reduction were
other strategic reasons behind our decision (Geer,
2005).
The chosen ZigBee chip is ETRX2 from
Telegesis. This is a ZigBee module on the 2,4 GHz
ISM band based upon the Ember’s EM250 chip. We
used the development environment proposed by
Ember to develop a ZigBee-compliant network
following mesh topology (ZigBee Alliance, 2007).
The chip consumes 30 mA when receiving or
transmitting data and 10 µA in sleep mode. As we
will use the radio exceptionally, just when are
reasonable indications about a fall (when a threshold
is exceeded), average power consumption due to
communication is reduced.
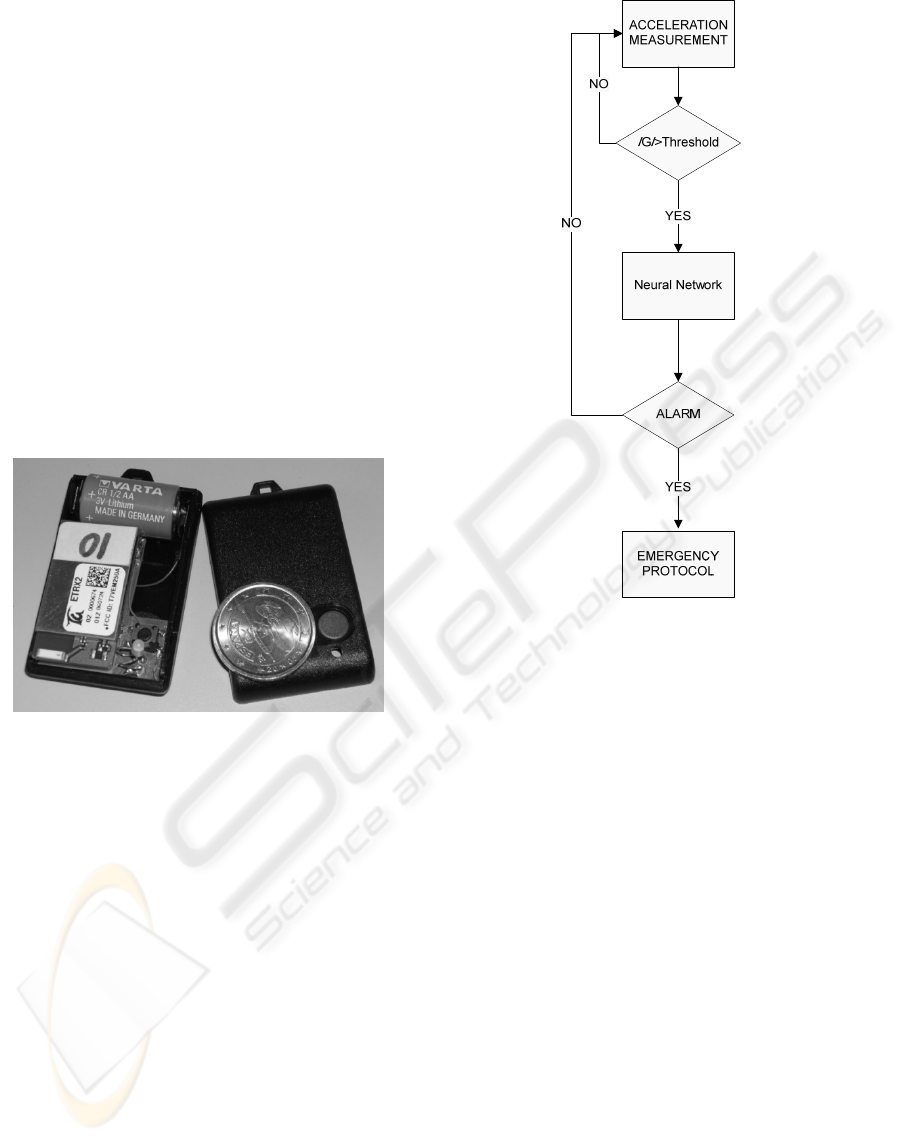
The user interface consists of a single button and
a buzzer for user interaction. Figure 3 shows the
mobile device prototype. Its size, including battery,
is 58x36x16 mm and it weights 30 gr.
Figure 3: Mobile device prototype.
In order to make the device useful is extremely
important to keep it on working long time using the
same set of batteries. That is why we gave
preference to power-conservative and size of
batteries among other designing requirements like
transmission rate or processing time. Precise battery
life estimation is very difficult because it will
depende on the number of false alarms generated;
every time the threshold is exceeded it sends data via
ZigBee. Anycase, with the battery used (3 V, 1000
mA·h), it can last for several months daily sending
several false falls to analize.
2.2 Software
As we said before, we designed a neural net to detect
falls also aiming to minimize the number of false-
falls compared to simple threshold based detectors.
Figure 4: System’s simplified flow diagram.
In our case, we use an acceleration threshold to
get the “acceleration pattern” of the possible fall to
be studied. Every 32 ms the device stores the current
acceleration measurements. It keeps a buffer with
the last 5 samples (t
1
≈ 160 ms). If the threshold is
exceeded, a possible fall might have happened. Then
we gather 25 samples more (t
2
≈ 800 ms) and all the
data (960 ms) is sent via ZigBee to the PC. As we
will see in section 3.2, those times and the threshold
have been empirically set through acceleration
pattern analysis of many falls and false-falls.
The “window time” (t
w
=t
1
+t
2
) represents the time
that the neural net analyzes the data in order to
relation the detected event to a true fall.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
542
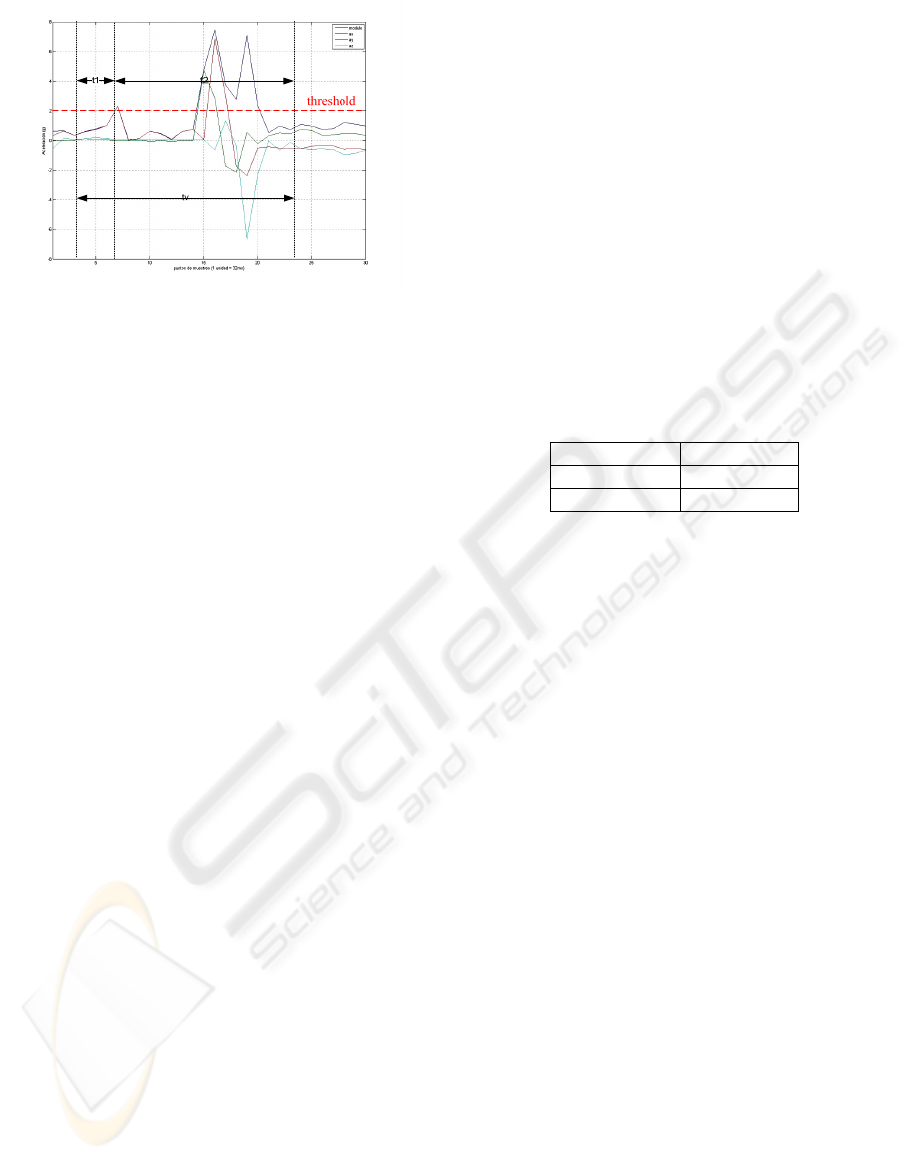
Figure 5: Window time.
In case the neural network detects a real fall, the
PC asks the mobile device to buzz for one minute.
During this time, the user can cancel the fall
situation pressing the button; the user is okay and
does not need assistance. In other case, an alert is
sent to an assistance center asking for help.
3 NEURAL NETWORK DESIGN
We have chosen MLP (MultiLayer Perceptron)
architecture because is the best neural network for
pattern classification (Del Hoyo Alonso, 2003).
MLPs are feedforward neural networks trained with
the standard backpropagation algorithm. They are
networks that learn how to transform input data into
a desired response. As they are supervised, they
require a set of known patterns with known
responses to get trained. With one or two hidden
layers, they can approximate virtually any input-
output map. They have been shown to approximate
the performance of optimal statistical classifiers in
difficult problems (Neurosolution web, 2007).
Every acceleration point, within window time, is
considered as input data to train neural network to
distinguish between true and false falls (figures 1a
and 1b). That is to say, if an event is represented by
30 samples for each axis (X, Y and Z), the number
of inputs will be 90 (30x3). Consequently, it is the
same as we give the net the whole graph to compare
and classify.
We have decided to train the net with one hidden
layer. To check if our choice is convenient or not,
we have designed a test bench with different
numbers of neurons, studying the absolute error in
each case. To accelerate the training, we have
chosen a bipolar sigmoid activation function for
neurons of the hidden layer. The activation function
of the output neuron is unipolar sigmoid so the
output looks like a binary signal (1 = TRUE FALL;
0 = FALSE FALL).
The suitable number of neurons of the hidden
layer is obtained doing simulations of different
neural nets. Finally, we choose the one which
produces the minimum absolute error. To reduce the
number of simulations and to get patterns from the
inputs able to generalize the results, we have defined
a requirement: the number of inputs is greater than
the number of neurons of the hidden layer.
3.1 Input Data Harvesting
Ten people of different ages, weight, height and sex
imitated the movements of elderly people to create a
data base of falls.
Table 1: Volunteers’ characteristics.
Age range 25-40 years
Weight range 44-105 kg
Height range 1.58-1.90 m
To get the data as close to reality as possible, the
volunteers had the acceleration detector hanged
around the neck. Volunteers were asked to simulate
true and false falls situations.
TRUE falls:
Every volunteer falls down 10 times on a
straw mat. The fall intensity changed (rough
and soft) and the way of falling down too
(side, front, backwards), hitting the ground
with their back, hip, knees, etc.
FALSE falls:
Every volunteer flings himself down 5 times
on the center and 5 times on the side of a sofa.
Every volunteer stumbles and hits a wall
without falling down 5 times.
Every volunteer walks around for 2 minutes
doing normal movements like sitting up and
down in chairs, picking up things, etc.
During the test, the fall detector continuously
samples the three acceleration axes each 32 ms
sending them to a PC working as a data logger. In
the end, we get a file with all the acceleration
samples in axis X, Y and Z for every volunteer. The
resulting data base consists of 99 samples of true
falls (we had one error while collecting data) and
150 of false falls.
FALL DETECTOR BASED ON NEURAL NETWORKS
543
3.2 Input Data Analysis
First of all, data analysis has determined the window
time length. After studying all the falls, we decided
that an event could be represented with 30 samples
(tv = 960 ms; t1 = 160 ms; t2 = 800 ms). This means
that the microcontroller has to store always in
memory the last five samples to send, in case the
acceleration threshold is exceeded, the event to the
PC to be analyzed.
With the window time selected, the number of
inputs to the neuronal network is set to 90. In order
to reduce the number of network entries -and
consequently the network size- we have done a PCA
(Principal Component Analysis). This method lies in
referencing input data to a new origin and coordinate
base.
In the new reference, the main components are
chosen to be those with the maximum variance
among samples (those with the highest covariance).
Therefore, if we take the samples representing
more than 95% of covariance, the number of input
will be reduced without losing significant
information. This leads to suppose that the greater is
the variance of an input, the more information it
gives.
The acceleration threshold was decided
experimentally. At first, guided by most of the
bibliography (Chen et al., 2005), we chose a 3 g
value. Then 97 out of 99 true falls and 121 out of
150 false falls surpassed the selected threshold.
Missing true falls is far worse than over-
detecting false falls, thus we reduced the threshold to
2 g to prevent losing any fall. As expected, we got
all the falls, but the number of false falls which
surpassed the threshold, increased to 241 because
even normal movements triggered the detection
process.
After using PCA analysis with the 340 events (99
falls plus 241 false-falls), the number of inputs was
reduced from 90 to 55, keeping the 95% of the
covariance of the original data.
3.3 Network Performance
The network was trained used Levenberg-Marquardt
algorithm (Neural-toolbox in Matlab).
We trained different MLP architectures 55xMx1
(being M the number of neurons in the hidden layer,
5≤M≤35). We repeated this process ten times in
order to ensure the network design and its
performance. Each test randomly selected 80% of
the events for training and 20% for validating. That
is to say, from the whole 340 events (99 falls plus
241 false-falls), the validation group had 20 true
falls and 48 events that could be confused with falls.
In the end, a neural net with 22 hidden neurons was
able to classify falls correctly.
When interpreting the neural net output give
precedence to the fall detection. Thus, we decided
that if the output is above or equal to 0.3, a fall is
detected. On the other hand, if the output is below
0.3, the analyzed event was not a true fall.
In table 2 we can see the network performance for
the ten tests.
Table 2: Validation group detection results.
Network fall
detection /
Fall events
Network fall
detection /
False-fall events
Test 1 20 / 20 0 / 48
Test 2 20 / 20 0 / 48
Test 3 20 / 20 1 / 48
Test 4 20 / 20 0 / 48
Test 5 18 / 20 1 / 48
Test 6 20 / 20 1 / 48
Test 7 16 / 20 1 / 48
Test 8 18 / 20 0 / 48
Test 9 17 / 20 1 / 48
Test 10 15 / 20 0 / 48
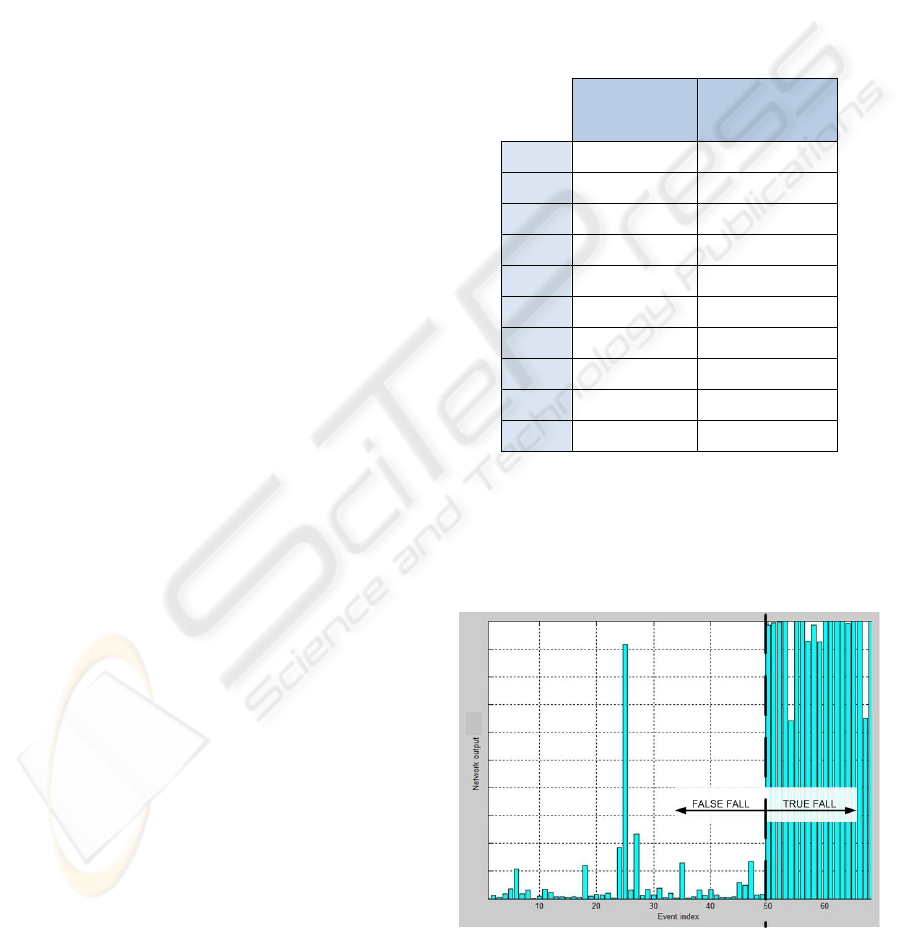
We can see how the network is able to detect
92% of all the falls and filter up 99% of the events
that can be confused with falls.
In figure 6, we show the network output we got
for the validating group in third test.
Figure 6: Network output for the third validation group.
BIOSIGNALS 2008 - International Conference on Bio-inspired Systems and Signal Processing
544

4 CONCLUSIONS
The final results using MLP neural networks for fall
detection have been quite satisfactory. The
application classifies correctly 92% of the validation
group falls, better performance than other detection
methods: 80% in (Chen et al., 2005). Moreover, the
number of false alarms is drastically reduced to 1%,
which leads to enhance users trust on the fall
detector. Nevertheless, a more extensive study with
more users being also elderly has to be developed in
order to gather more data and confirm the results.
Although the portable device can run for months
with the same battery, the system needs a computer
to analyze all the data. In order to reduce costs, it is
possible to analyze the pattern remotely. As the
amount of exchanged data is reduced, it could be
sent via ADSL (if the person is at home), GPRS or
even SMS to a service center. Anyhow our
application gets better performance than others
embedded in a microcontroller but a higher cost and
complexity. To overcome this, we are currently
minimizing the neural network size so it can run in a
microcontroller or FPGA.
ACKNOWLEDGEMENTS
This work was supported by the Spanish MCYT
under project Ambiennet (TIN2006-15617-C03-02)
and by the EU under projects MonAmi (IST-5-
0535147) and EasyLine+ .
REFERENCES
Alwan, M., et al., 2006. ‘A Smart and Passive Floor-
Vibration Based Fall Detector for Elderly’. Proc. The
2nd IEEE International Conference on Information &
Communication Technologies: from Theory to
Applications ICTTA’06, Damascus, Syria, April 2006.
Chen, J., et al., 2005. ‘Wearable Sensors for Reliable Fall
Detection’. Proc. 27th Annual International
Conference of the Engineering in Medicine and
Biology Society, IEEE-EMBS 2005, September 2005,
pp. 3551–3554.
Degen, T., et al, 2005. ‘SPEEDY: a fall detector in a wrist
watch’. Proc 7th IEEE International Symposium on
Wearable Computers, October 2005, pp. 184–187.
Del Hoyo Alonso, R. 2003. ‘Supervised classification with
Associative SOM.’ IWANN 2003: 334-341
Doughty, K., et al, 2000. ‘The design of a practical and
reliable fall detector for community and institutional
telecare’, Journal of Telemedicine and Telecare,
February 2000, 6, (1), pp. 150–154.
Eurostat web: http://epp.eurostat.ec.europa.eu/ last visited
2007
Geer, D., 2005. ‘Users make a Beeline for ZigBee sensor
technology’. IEEE Computer Magazine, 38, pp. 16–
19.
Hansen, T.R., et al., 2005. ‘Using smart sensors and a
camera phone to detect and verify the fall of elderly
persons’. Proc. European Medical & Biological
Engineering Conference (EMBEC 2005), November
2005.
Nait-Charif, H., and McKenna, S. J., 2004. ‘Activity
Summarisation and Fall Detection in a Supportive
Home Environment’. Proc. of the 17th international
Conference on Pattern Recognition, (Icpr'04),
Washington DC, August 2004, 4, pp. 323–326.
Neurosolution web.
http://www.nd.com/definitions/mlp.htm last visited 2007.
Noury, N., 2002. ‘A Smart Sensor for the remote follow
up of activity and fall detection of the elderly’. Proc.
2nd Annual International Special Topic Conference on
Microtechnologies in Medicine & Biology, IEEE-
MMB2002, Madison-USA, May 2002, pp. 314–317.
Rodriguez J.M., et al, 2005. ‘Portable System for Patient
Monitoring With Wireless Technologies’. The
European Journal for the Information Professional,
October 2005, 5, (5), pp. 46–52.
Sixsmith, A., and Johnson, N., 2004. ‘A smart sensor to
detect the falls of the elderly’, IEEE Pervasive
Computing, April-June 2004, 3, (2), pp. 42–47.
Tunstall web. http://www.tunstall.co.uk last visited 2007.
Williams, G., et al., 1998. ‘A smart fall and activity
monitor for telecare applications’. Proc. of the 20th
IEEE Annual International Conference of the
Engineering in Medicine and Biology Society,
October 1998, 3, pp.1151–1154.
ZigBee Alliance: ‘ZigBee Standard’, 2007
FALL DETECTOR BASED ON NEURAL NETWORKS
545
