
A SIMULATION-BASED DIFFERENCE DETECTION
TECHNIQUE FOR BOTTOM-UP PROCESS RECONCILIATION
Xi Chen and Paul W. H. Chung
Department of Computer Science, Loughborough University, Loughborough, Leicestershire, United Kingdom LE11 3TU
Keywords: Business process, reconciliation, simulation, B2B e-commerce.
Abstract: With the increasing dynamic and changing business environment, bottom-up approaches for business
process collaboration is currently receiving a great deal of attention in the research community. Bottom-up
approaches are seen to be more flexible then top-down approaches. However, none of the available
techniques for process collaboration are suitable for process reconciliation, which is a common problem
when different organisations have to work together. In order to address the issue in a bottom-up way, a
simulation-based technique for detecting differences between any two given processes is proposed. It is
based on the extended definitions of process compatibility for collaboration and is the core of the process
reconciliation mechanism.
1 INTRODUCTION
In modern enterprises, workflow technology is
commonly used for business process automation.
Established business processes represent successful
work practice and become a crucial part of corporate
assets. In the era of Internet, business processes are
unlikely to remain within the boundary of a single
organisation. In response to the need for B2B e-
commerce, the concept of business process
collaboration is emerging.
However, before any two business partners can
proceed in conducting B2B e-commerce
transactions, their business processes that are
involved in the transactions must be compatible with
each other at business level (Yang and Papazoglou,
2000), i.e. they have a commonly agreed sequence
of exchanging collaborative messages (e.g. a
business object like a purchase order or a service
invocation request). In general, there are two general
approaches to achieve compatibility for process
collaboration between two trading partners, namely,
top-down and bottom-up. A top-down approach
normally involves that people meet and discuss the
collaboration, design the collaborative process and
implement it locally. On the contrary, a bottom-up
approach derives collaborative process from local
processes, which is known a difficult task. However,
because the top-down approach is labour intensive
and expensive (Wombacher, 2005), it is necessary
and worthwhile to explore the feasibility of the
bottom-up approach in the face of an increasingly
dynamic and changing business environment.
Current techniques for process collaboration are
not able to provide sufficient computer assistance for
bottom-up process reconciliation for a number of
reasons. First, the definition of absolute
compatibility, adopted by the top-down approach, is
too limited. Other categories of compatibility will
need to be identified. Secondly, a process
reconciliation mechanism is required to consider all
the relevant activities. Thirdly, as the core of the
mechanism, a technique for process difference
detection is needed to be able to address the
differences encountered and guide the user towards a
possible common process.
In section 2, definitions of process compatibility
for collaboration are reviewed and new definitions
proposed. On these definitions process reconciliation
activities are based. Section 3 depicts the desired
process reconciliation mechanism with emphasis on
support for a unilateral decision-making process. In
section 4, a simulation-based technique for detecting
process differences is proposed and is explained by
walking through an example. Conclusion is drawn in
chapter 5 and future work is described.
The activity-based workflow modelling
formalism (Bi and Zhao, 2004) is used in the rest of
the paper as it is useful visual representation of
72
Chen X. and W. H. Chung P. (2007).
A SIMULATION-BASED DIFFERENCE DETECTION TECHNIQUE FOR BOTTOM-UP PROCESS RECONCILIATION.
In Proceedings of the Ninth International Conference on Enterprise Information Systems - SAIC, pages 72-77
DOI: 10.5220/0002394600720077
Copyright
c
SciTePress
business processes. In this representation a vertical
synchronisation bar is used as the symbol for an
AND vertex; a circle with a cross inside is for an
XOR vertex; a rectangle is for a normal activity
vertex and an arrow is a directed arc. The only
difference from the formalism is the type of split or
join (AND or XOR) of a routing vertex is expressed
by the pre-condition or post-condition of its
neighbour activity vertex, which makes the routing
vertex merged with its neighbour. Further more,
when needed, an activity vertex explicitly shows its
role in the collaboration as either a message sender
(s) or receiver (r) (Chen and Chung, 2006) as a
superscript.
2 PROCESS COMPATIBILITY
FOR COLLABORATION
The purpose of reviewing the definitions of process
compatibility for collaboration is to clarify the goal
that process reconciliation needs to achieve if a
bottom-up approach is followed. According to
Hiltrop and Udall (1995), one of the essential
principles of negotiation is to get what both sides
want rather than to win at any cost. Apart from the
unanimously agreed absolute compatibility, another
two types of compatibility can be named as
deadlock-free compatibility and reconcilable
compatibility (Wombacher, 2005; Krukkert, 2003).
These three types of compatibility for collaboration
are defined below.
Definition 1: Absolute compatibility. Two
abstract collaborative processes have the same set of
activity vertices, routing vertices and arcs.
Definition 2: Deadlock-free compatibility. If the
difference between two processes are only XOR
activities on the receiving process and the
corresponding sending activities do not split into
XOR branches then the two processes are deadlock-
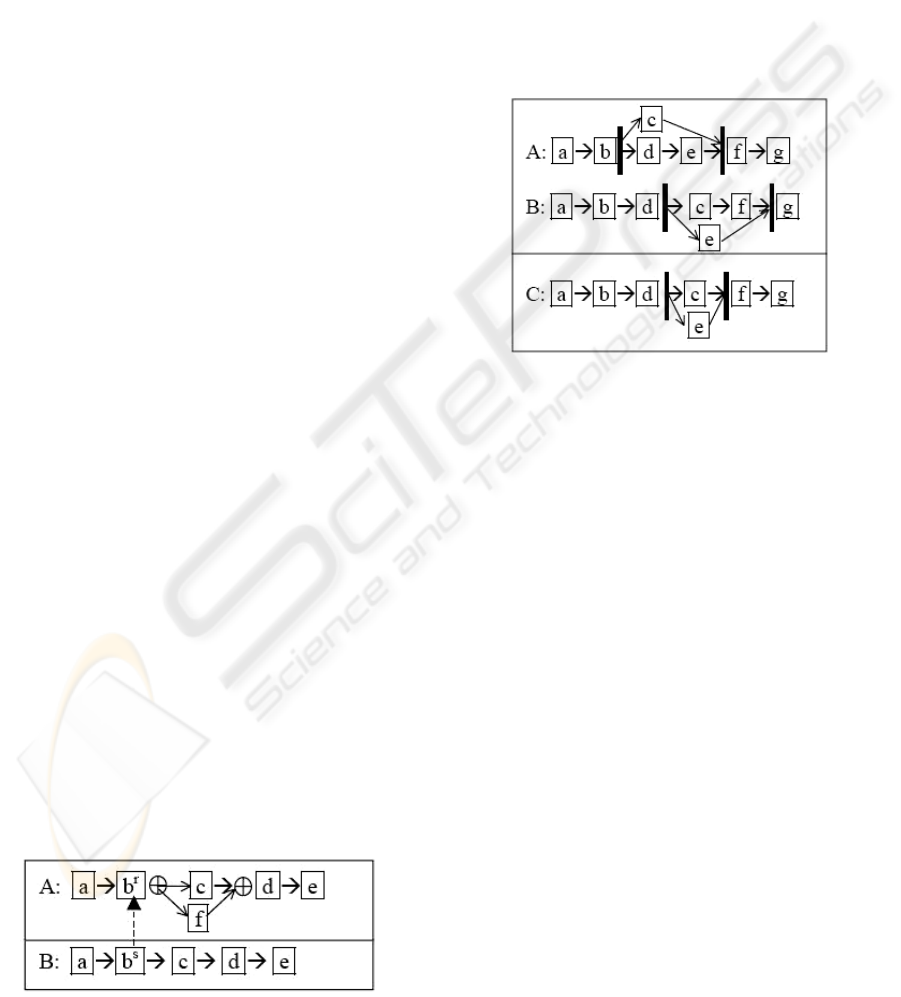
free compatible. For example, in Figure 1, process A
and B are different but are deadlock-free compatible.
When B informs A the only available option by
sending a message from B.b
s
to A.b
r
, a deadlock
situation will not arise. Therefore, no adjustment is
required for both sides.
Figure 1: Deadlock-free compatibility.
Definition 3: Reconcilable compatibility. Two
processes may appear differently but are
reconcilably compatible if they have the same set of
activity vertices and the maximum intersection of
the sets of possible paths contains at least one path
that leads to success. A path denotes a possible
execution sequence of all the activities that can be
reached based on the current process definition.
As illustrated in Figure 2, process A is different
from process B but there exists process C that can be
successfully traced through both A and B. Thus,
process C can be adopted, which meets the
requirements of A and B, and collaboration can
proceed.
Figure 2: Reconcilable compatibility.
These definitions collectively form a set of
acceptance criteria when considering in a bottom-up
manner whether any two given processes can be
simply adjusted to be compatible for collaboration.
For processes that are not compatible, i.e. they
do not meet any one of above definitions, then
differences between them must be detected and
appropriate changes must be made by either or both
partners in order to bring about collaboration.
3 PROCESS RECONCILIATION
MECHANISM
Bilateral negotiation is an effective way of
reconciling differences in a distributed manner (Li et
al., 2003). According to Li et al., such a negotiation
comprises a series of unilateral decisions within the
control of an underlying negotiation protocol. Since
it is common that more than one discrepancy exist
between two processes, partners involved are very
likely to negotiate and make decisions on multiple
issues, which makes the bilateral negotiation a
multi-attribute (or multi-issue) one (Fershtman,
1990). Whether to apply a simultaneous or
A SIMULATION-BASED DIFFERENCE DETECTION TECHNIQUE FOR BOTTOM-UP PROCESS
RECONCILIATION
73
sequential protocol for a multi-attribute negotiation
depends on the problem itself. This is because
discrepancies between processes are often
interdependent, in order to prevent simultaneous
controversial decisions from being made, the
negotiation protocol can only be set as a sequential
one in the form of alternate proposal of counteroffer
after the initial offer. Therefore, within a bilateral
negotiation process are many unilateral decision-
making steps that take place on both sides.
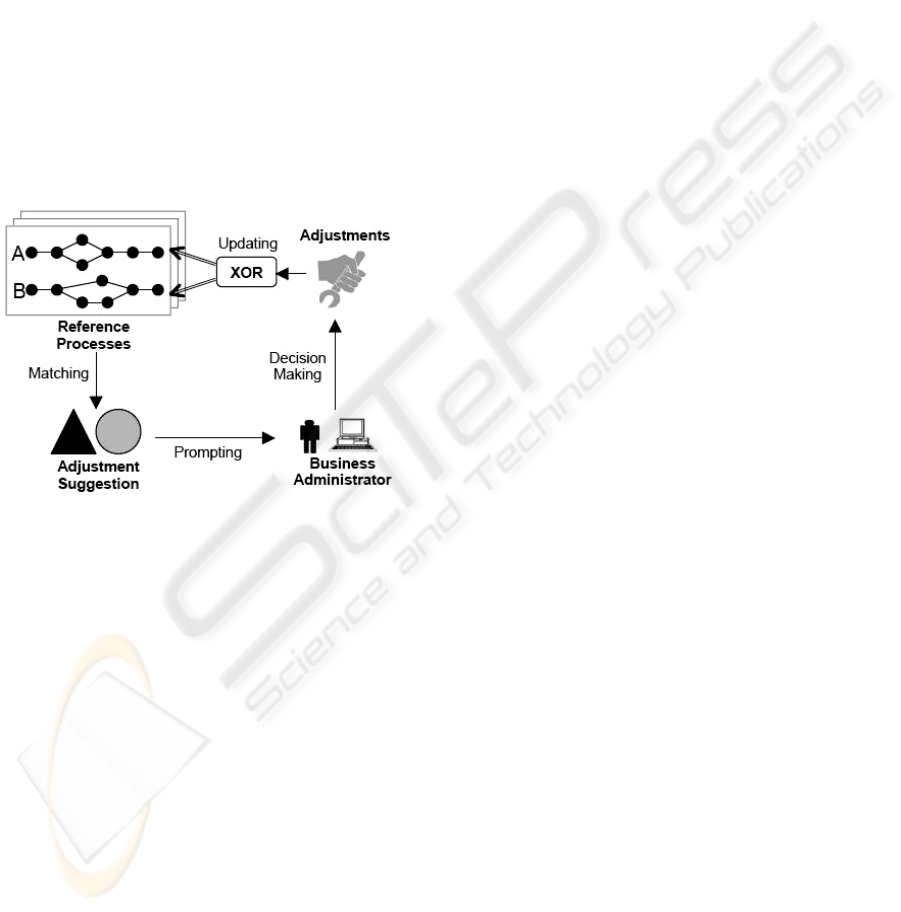
In the light of the requirement of privacy and the
complexity of the decision making process, it is
assumed that within a distributed B2B environment,
the unilateral decisions are made by people on both
sides of the negotiation as shown in Figure 3. This
process is repeated until a modified collaborative
process is completely formed or collaboration is
abandoned.
Figure 3: Unilateral decision-making process.
Most current techniques for process matching
take a static view towards the differences between
two processes. Few have considered process
reconciliation when mismatches are encountered. If
these techniques were applied directly to process
reconciliation, they either confine themselves to
minor passive adaptations (Krukkert, 2003; Du et
al., 2005; Wombacher, 2005) or handle drastic
changes without giving user any selection right
(Yeoh et al., 2004). Juan (2006) proposes a string
comparison approach to tackling process logic
differences however the preliminary case study
shows that the approach is restrictive because it
requires to express the process in digraph form into
strings that is on sequential level. Demanded by the
interactive and repetitive nature of the process
reconciliation task, discrepancies must be identified
according to the progress of reconciliation. Also, the
current reference process needs to be continuously
updated to reflect the user’s decision regarding the
previous discrepancy. Such dynamism can also be
seen from Figure 3.
4 SIMULATION-BASED
PROCESS DIFFERENCE
DETECTION TECHNIQUE
Since the unilateral decision-making is based on the
discrepancy currently identified, it is required to
detect and prompt the discrepancy to the user
appropriately. Focusing on the process diagram or
the corresponding adjacent matrix would not
contribute further to the desired manner of
difference detection. What these techniques can
reveal are merely structural differences between two
digraphs. From process logic’s point of view, such
differences are trivial. Therefore, the desired
technique should be able to reveal process logic
information.
In theoretical computer science, a simulation
pre-order describes a relation between two state
transition systems that one system behaves in the
same way as the other or one simulates the other.
Although being used only to match two
processes by identifying whether any possible
common paths exist, the simulation-based technique
proposed by Krukkert (2003) does suggest another
view on the problem of process difference detection.
According to Krukkert, an activity-based process
diagram can be converted to a state transition system
(STS) if several prerequisites are met. Related
conversion algorithms are also provided.
Therefore, on the one hand, a simulation-based
technique can be used to identify common paths that
exist between two processes if there are any, which
meets the need of matching for reconcilable
compatibility. On the other hand, even if no such
common path exists, it can be used to reveal to what
extend common states exist as well as from which
point difference occurs. The differences encountered
in the way can be further compared, analysed and
prompted to the user to support the decision-making
task. Since the simulation-based technique is only
valid for processes with the same number of
vertices, a pre-treatment and a post-treatment are
required to deal with unmatched vertices. The
algorithm is constructed as in Table 1.
ICEIS 2007 - International Conference on Enterprise Information Systems
74
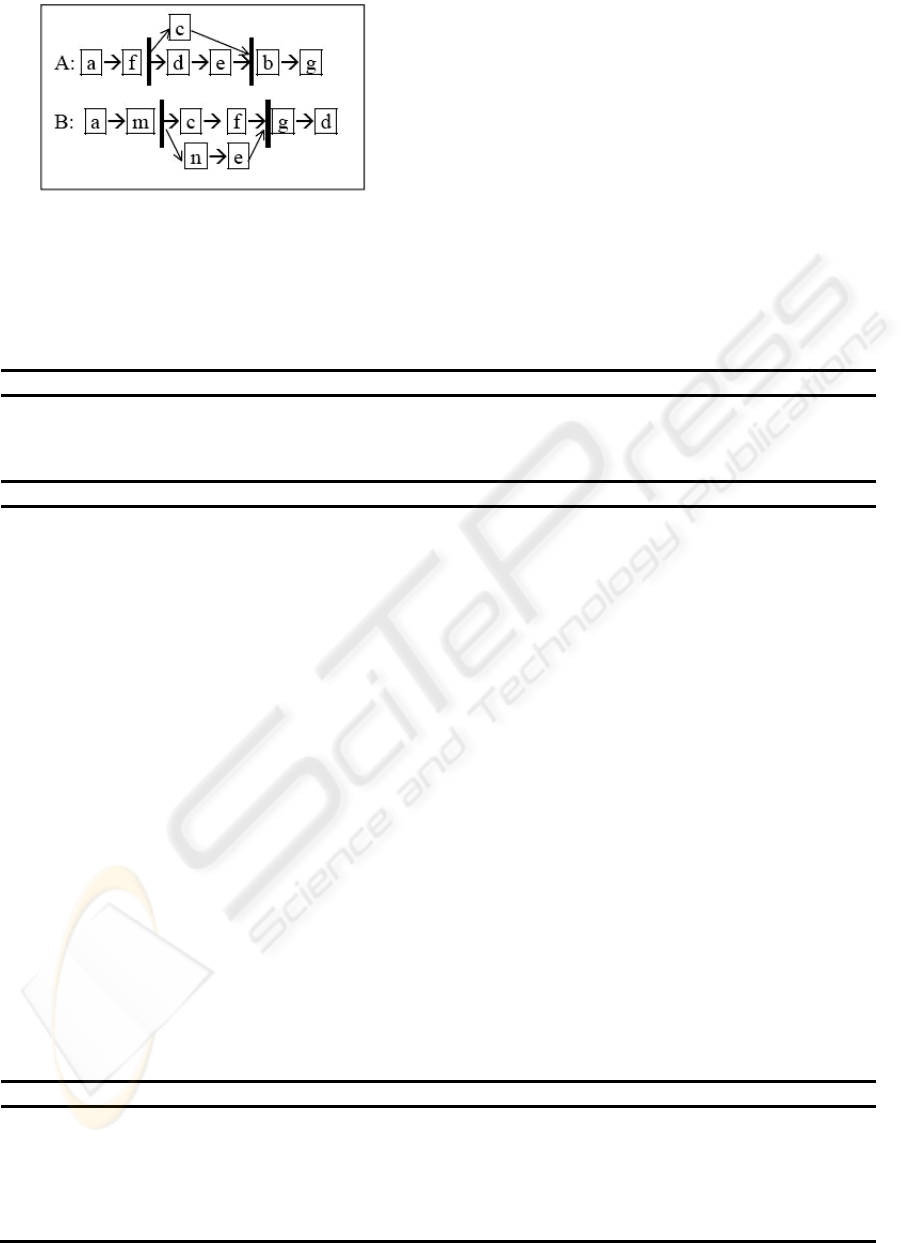
Table 1: Simulation-based difference detection algorithm.
Pre-treatment
Conduct bipartite matching of vertices of both process diagrams, extract only
the matched vertices, record the unmatched vertices and their causal relations
with the matched ones of both sides;
Check for isomorphic sub-structure and replace them with single dummy vertex;
Core part of the difference detection algorithm
WHILE maxCommonPathFlag == FALSE AND terminationFlag == FALSE
STSD_A = activityDtoSTSD(activityD_currRefA);
STSD_B = activityDtoSTSD(activityD_currRefB);
FOR (currLayer = 1; currLayer <= matchedVertexNum; currLayer++)
commonState = StateComparison(currLayer);
IF(commonState)
maxCommonPath = maxCommonPath + commonState;
verifyMaxCommonPath(maxCommonPath);
IF(currLayer == matchedVertexNum)
maxCommonPathFlag = TRUE;
break;
ELSE
dispFwd = getDispFwd();
dispBkwd = getDispBkwd();
adjustmentSuggestion = getAdjustmentSuggestion(dispFwd, dispBkwd);
tempActivityD = adjust(adjustmentSuggestion, activityD_currRefA);
association = checkAssociation(adjustmentSuggestion);
IF(association)
promptUser(theUnmatchedVertices);
decision_unmatched = getUserDecision();
recordDecision(decision_unmatched);
promptUser(adjustmentSuggestion, tempActivityD);
decision = getUserDecision();
adjust(decision, activityD_compromising);
END-FOR
END-WHILE
Post-treatment
adjust(decision_unmatched, activityD_compromising);
Prompt the remaining unmatched vertices and unique exclusive OR branches (if
any) as discrepancies to the user;
decision_unmatched = getUserDecision();
adjust(decision_unmatched, activityD_compromising);
Figure 4: Example processes A, B.
The example illustrated in Figure 4 is used to
explain the algorithm.
After a bipartite matching, a, c, d, e, f and g are
identified as matching vertices. ‘b’ is uniquely
possessed by A whilst ‘m’ and ‘n’ by B. No
isomorphic sub-structure is identified. After the
matching vertices being deposited, process A
1
and
B
1
are the results (illustrated in Figure 5), which are
converted to state transition system graphs as shown
in Figure 6.
A SIMULATION-BASED DIFFERENCE DETECTION TECHNIQUE FOR BOTTOM-UP PROCESS
RECONCILIATION
75
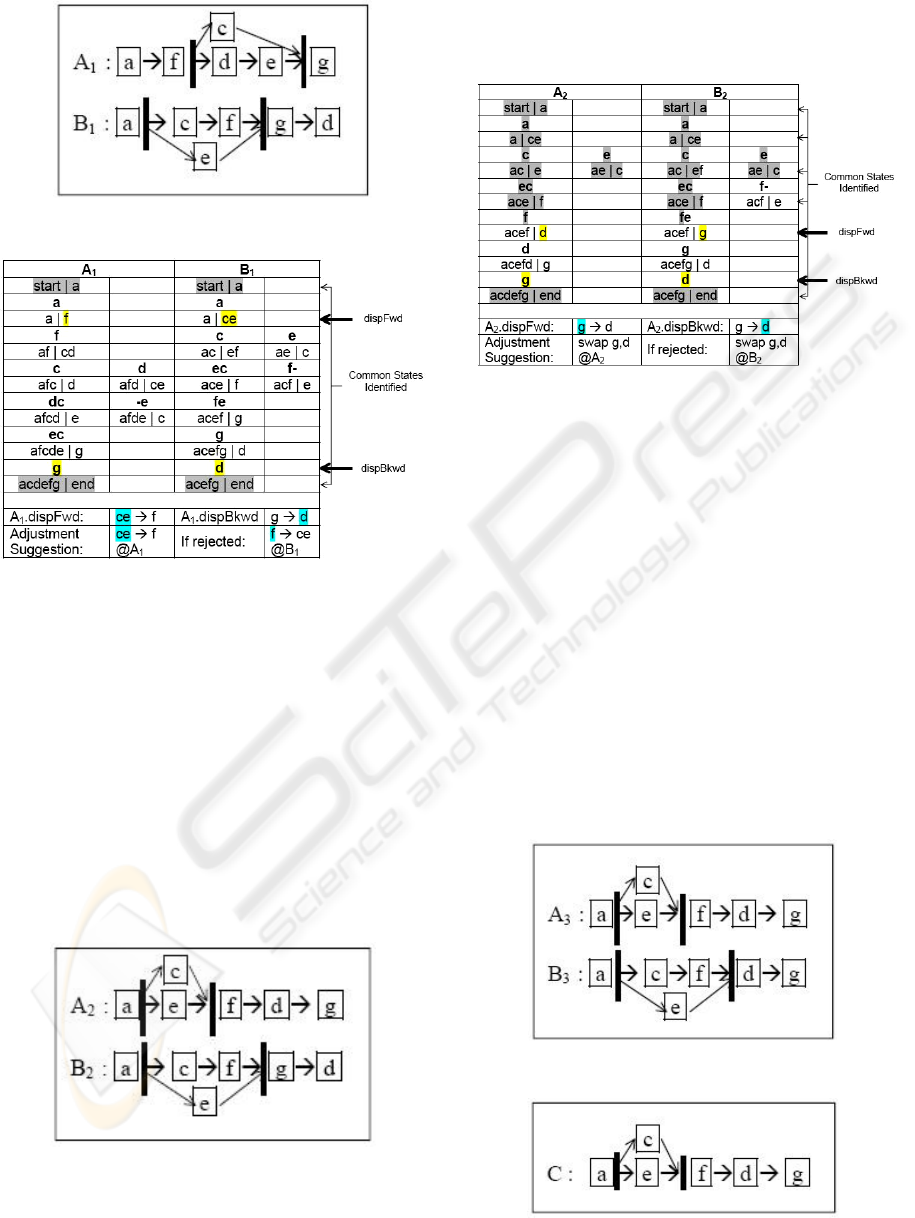
Figure 5: Result of matched vertices’ extraction.
Figure 6: 1st round comparison between STS graphs of A
1
and B
1
.
Common states are examined in a forward
direction. When discrepancy is encountered, it is
recorded as forward discrepancy (dispFwd) and a
backward examination is carried out with the
encountered backward discrepancy (dispBkwd)
recorded. Since the vertices involved in A
1
.dispFwd
and A
1
.dispBkwd are not the same, no swap
operation is required. The A
1
.dispFwd is by default
selected as the current adjustment suggestion and is
prompted to the user as “‘ce’ should be moved
immediately in front of ‘f’ in process A
1
” together
with a corresponding activity diagram
representation.
Figure 7: Activity diagrams of A
2
and B
2
.
Assuming that user A accepts this suggestion
and therefore process A
1
needs to be adjusted
accordingly to A
2
whilst B
2
remains the same as B
1
,
whose activity diagrams and corresponding STS
graphs are shown in Figure 7 and Figure 8.
Figure 8: 2nd round comparison between STS graphs of
A
2
and B
2
.
During the second round comparison, four more
common states are identified, which are ‘a | ce’, ‘ac |
e’, ‘ae | c’ and ‘ace | f’. Following on from this,
A
2
.dispFwd and A
2
.dispBkwd are identified and the
involving vertices are evaluated as the same, which
implies the adjustment suggestion should be a
vertices swap operation between ‘g’ and ‘d’ in
process A
2
. After being prompted both in words and
graphically, assuming that user A rejects the
discrepancy this time, process B
2
is expected to
make concession by being adjusted instead, i.e.
swapping ‘g’ and ‘d’ in B
2
to form B
3
whilst, A
3
remains the same as A
2
. Shown in Figure 9 are the
resulting activity diagrams of A
3
and B
3
. After the
third round comparison between STS graphs, a
common path is found, whose corresponding activity
diagram C is shown in Figure 10.
Figure 9: Activity diagrams of A
3
and B
3
.
Figure 10: Common path identified between A
3
and B
3
.
ICEIS 2007 - International Conference on Enterprise Information Systems
76

Vertices that have no match (b, m and n) are
highlighted to user A for further decisions. C
1
is
shown in Figure 11 as one of the possible resulting
common collaborative process following
organisation A’s unilateral decisions.
Figure 11: One possible resulting common collaborative
process following organisation A’s unilateral decisions.
When process C
1
, as the counteroffer, is passed
to organisation B, the same procedure is followed by
user B to carry out their own decision-making. Other
issues, e.g. strategy of unilateral decision-making,
negotiation termination condition, are also important
but beyond the scope of this paper.
5 CONCLUSIONS
The simulation-based process difference detection
technique is proposed to provide support during
distributed process compatibility negotiation by
helping users concentrate on a series of adjustment
suggestions to agree on a common path as soon as
possible. With the support of such a technique,
human efforts are saved from the labour-intensive
task and corporate assets in terms of business
processes are preserved and put into good use. Also,
the ability to start from two predefined process
logics enables the technique to be used from bottom
up, which makes it possible to replace the expensive
top-down approach to cross-organisational process
reconciliation. Furthermore, the technique can also
be applied in the area of process compliance
(Cheung, 2003) as well as process benchmarking
(Juan and Ou-Yang, 2005; Juan, 2006), in which
customer defined processes are checked for
compliance issues against certain standard or best-
of-breed process.
In addition to preliminary case studies having
been carried out, the effectiveness of the technique
needs to be further evaluated through a full range of
real life business processes. It is also envisioned that
a comprehensive business process collaboration
framework is needed to take full advantage of such a
technique, within which the execution components
are mentioned in Chen and Chung (2006).
REFERENCES
Bi, H., Zhao, J., 2004. Applying Propositional Logic to
Workflow Verification. Information Technology and
Management 5, 293–318, 2004.
Chen, X., Chung, P., 2006. Cross-Organisational
Workflow Enactment Via Progressive Linking by
Run-Time Agents. In Ali, M. and Dapoigny, R. (Eds.):
Proceedings of 19th International Conference on
Industrial Engineering and Other Applications of
Applied Intelligent Systems, IEA/AIE 2006, LNAI
4031, pages 54-59, 2006.
Cheung, Y.C., 2003. COMPLIANCE FLOW - AN
INTELLIGENT WORKFLOW MANAGEMENT
SYSTEM TO SUPPORT ENGINEERING
PROCESSES, Ph.D. Thesis, Loughborough
University, 2003.
Du, Z., Huai, J., Liu, Y., Hu, C., and Lei., 2005. IPR:
Automated Interaction Process Reconciliation. In
Proceedings of IEEE/ACM International Conference
on Web Intelligence (WI), 2005.
Fershman, C. The importance of the agenda in bargaining.
Games and Economic Behavior, 2(224-238), 1990.
Hiltrop, J., Udall, S., 1995. The Essence of Negotiation,
Prentice Hall, London 1995.
Juan, Y.C. and Ou-Yang, C., 2005. A process logic
comparison approach to support business process
benchmarking, International Journal of Advanced
Manufacturing Technology, Vol. 26, pages 191-210,
2005.
Juan, Y.C., 2006. A String Comparison Approach to
Process Logic Differences between Business Process
Models. In Proceedings of the Joint Conference on
Information Sciences 2006, Atlantis Press, October
2006. doi:10.2991/jcis.2006.23
Krukkert, D., 2003. Matchmaking of ebXML business
processes, Technical Report IST-28584-
OX_D2.3_v.2.0, openXchange Project, Oct 2003.
Li, C., Giampapa, J.A., and Sycara, K., 2003. A Review of
Research Literature on Bilateral Negotiations, Tech.
Report CMU-RI-TR-03-41, Robotics Institute,
Carnegie Mellon University, November, 2003.
Wombacher, A., 2005. Decentralized establishment of
consistent, multi-lateral collaborations, PhD Thesis at
Technical University Darmstadt, Facultiy of
Informatics, 2005.
Yang, J., Papazoglou, M., 2000. Interoperation Support for
Electronic Business. COMMUNICATIONS OF THE
ACM June Vol. 43, No. 6, 39-47, 2000.
Yeoh, M.L., Chung, P.W.H., Anumba, C.J., El-Hamalawi,
A., Motawa, I.A., 2004. Process change identification
using workflow specification matching. In
Proceedings of the Tenth Americas Conference on
Information Systems, New York, New York, August
2004.
A SIMULATION-BASED DIFFERENCE DETECTION TECHNIQUE FOR BOTTOM-UP PROCESS
RECONCILIATION
77
