
UNSUPERVISED ALGORITHMS FOR SEGMENTATION AND
CLUSTERING APPLIED TO SOCCER PLAYERS
CLASSIFICATION
P. Spagnolo, P. L. Mazzeo, M. Leo and T. D’Orazio
Institute of Intelligent Systems for Automation – National Research Council
Via Amendola 122/D-I 70126 - Bari, Italy
Keywords: Sport scene analysis, Motion Detection, Background Subtraction, Data Clustering.
Abstract: In this work we consider the problem of soccer player detection and classification. The approach we
propose starts from the monocular images acquired by a still camera. Firstly, players are detected by means
of background subtraction. An algorithm based on pixels energy content has been implemented in order to
detect moving objects. The use of energy information, combined with a temporal sliding window procedure,
allows to be substantially independent from motion hypothesis. Then players are assigned to the
correspondent team by means of an unsupervised clustering algorithm that works on colour histograms in
RGB space. It is composed by two distinct modules: firstly, a modified version of the BSAS clustering
algorithm builds the clusters for each class of objects. Then, at runtime, each player is classified by
evaluating its distance, in the features space, from the classes previously detected. Algorithms have been
tested on different real soccer match of the Italian Serie A.
1 INTRODUCTION
In last years sport applications of computer vision
are increasing in many contexts, such as tennis,
football, golf, and so on. Many works focus on
soccer applications, because of it is very popular,
and is often broadcasted on television. Segmentation
and team discrimination are key-tasks for such kind
of applications.
The research activities in sports video have
focused mainly on semantic annotation (Assfalg et
al., 2003), event detection (Zhang et al., 2004),
generic content structure analysis (LeXing et al.,
2004) and summarization (Ekin et al., 2003). The
high level applications above mentioned are based
on structural low level procedures: the player
segmentation, tracking and their classification.
In this work we focus our attention mostly on
two aspects of sport image analysis: the
segmentation of players from static cameras and
their classification in the standard RGB color space.
The correct segmentation of players is
fundamental for any further algorithm. The main
algorithms for moving objects detection are based on
background subtraction; a good review on these
approaches can be found in (Kanade et al., 1998)
and (Toyama et al., 1999).
Focusing the attention on sport applications,
interesting works are based on mathematical
morphology: in (Naemura et al., 2000) a
segmentation algorithm based on the watershed
transform is proposed. In (Misu et al., 2004) two
distinct modules (based on background subtraction
and chroma-key information) for player
segmentation have been implemented as plug-ins in
a more complex architecture. In (Xu, Orwell et al.,
2005) spectral and topological information are
integrated to model the background by means of a
mixture of Gaussians. The main drawback of this
approach is its dependence from several thresholds
manually defined. Thresholds are also critical for the
work proposed in (Xu and Shi, 2005). A different
approach is proposed in (Mathes et al, 2005): here
the goal of the work is the tracking of players, and it
appears to work well even in presence of moving
cameras. Tracking is also the main argument of
works proposed in (Misu et al., 2004), (Xu and Shi,
2005) and (Xu, Orwell et al., 2005).
Another aspect of sport images analysis is the
team discrimination. In (Xu, Orwell et al., 2005)
color information and local position in the field are
129
Spagnolo P., L. Mazzeo P., Leo M. and D’Orazio T. (2007).
UNSUPERVISED ALGORITHMS FOR SEGMENTATION AND CLUSTERING APPLIED TO SOCCER PLAYERS CLASSIFICATION.
In Proceedings of the Second International Conference on Signal Processing and Multimedia Applications, pages 129-134
DOI: 10.5220/0002139501290134
Copyright
c
SciTePress

integrated for the team discrimination. In
(Vandenbroucke et al, 2003) a supervised approach
based on a manual initialization of the required
classes has been used for the player classification. A
similar supervised approach is used in (Ekin et al,
2003) but now authors use color histograms to
characterized players and referees. In (Yu et al,
2005) SVM is used to assign each segmented object
to one of 5 relevant classes manually initialized.
Recently, in (Beetz et al., 2006) authors have
realized a system that uses the a priori knowledge to
analyze broadcast images for segmentation and
classification.
All works above mentioned try to solve the
problem of player team discrimination in a
supervised way, by means of human-machine
interaction for the creation of the reference classes.
On the contrary, in this work we propose an
unsupervised algorithm for the creation of the
classes in the scene (players and referee).
Firstly, for the segmentation phase we propose
an approach based on background subtraction; we
present a novel background modeling algorithm able
to build the background model with an unsupervised
approach; no assumptions about the
presence/absence of foreground objects and changes
in light conditions was required. So it is particularly
suitable for sport scene analysis, where the
constraint of absence of actors during the
initialization phase is practically unachievable. The
main idea is to exploit the pixels energy information,
integrated with a sliding windows procedure, in
order to distinguish static points from moving ones.
After the segmentation step, an unsupervised
procedure of player classification based on a
modified version of the BSAS algorithm will be
proposed. In the learning phase, a certain number of
segmented player are added to the training set; then,
all feature vectors are provided to the clustering
algorithm. Its constraints are the max number of
output clusters and a threshold on the adopted metric
measurement. The algorithm runs and adapt itself in
order to obtain the best configuration of output
clusters with respect to the application domain. At
runtime, after this training procedure, the feature
vector is extracted for each player and is provided to
the classifier, that assigns it to the correct cluster.
In the rest of the paper, firstly the background
model is presented (sec. 2); then, the feature
extraction (3) and classification steps (4) are
explained. Finally, the experimental results obtained
on real image sequences acquired during soccer
matches of the Italian Serie A are reported (5).
2 PLAYER SEGMENTATION
The first step of each background-based algorithm is
the background modelling. Here we focus our
attention on this phase, using the popular
background subtraction approach suggested in
(Kanade et al., 1998), for the segmentation.
The implemented modeling algorithm evaluates
the energy content for each point in a small temporal
window: the statistical values relative to slow energy
points are used for the background model, while
they are discarded for high energy points. In the
current temporal window, a point with a small
amount of energy is a static point; otherwise it
corresponds to a non static point, in particular it
could be a foreground point belonging to a
foreground object presents in the scene; or a
background point corresponding to a moving
background object. A coarse-to-fine approach for the
background modeling is applied in a sliding window
of size W (number of frames). The first image of
each window is the coarse background model
B
C
(x,y). In order to have an algorithm able to create
at runtime the required model, instead of building
the model at the end of a training period, the mean
and standard deviation eq. (1-2) are evaluated at
each frame; then, the energy content of each point is
evaluated over the whole sliding window, to
distinguish real background points from the other
ones. Formally, for each frame the algorithm
evaluates mean and standard deviation:
1
)1(),(),(
−
−+=
ttt
yxyx
μααμμ
(1)
1
)1(|),(),(|),(
−
−+−=
tttt
yxyxyx
σαμμασ
(2)
only if the intensity value of that point is
substantially unchanged with respect to the coarse
background model, that is:
thyxByxI
C
t
<− ),(),(
(3)
where th is a threshold experimentally selected.
In this way, at the end of first W frames, for each
point the algorithm evaluates the energy content as:
2
),(),(),(
∫
∈
−=
Wt
C
t
yxByxIyxE
(4)
The first fine model of the background B
F
is
generated, as
⎩
⎨
⎧
>
<
=
)(),(
)(),()),(),,((
),(
WthyxEif
WthyxEifyxyx
yxB
F
φ
σμ
(5)
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
130

A low energy content means that the considered
point is a static one and the corresponding statistics
are included in the background model, whereas high
energy points, corresponding to foreground or
moving background objects cannot contribute to the
model. The whole procedure is iterated on another
sequence of W frames, starting from the frame W+1.
The coarse model of the background is now the
frame W+1, and the new statistical values (1) and
(2) are evaluated for each point, like as the new
energy content (4). The relevant difference with (5)
is that now the new statistical parameters are
averaged with the previous values, if they are
present; so, the new formulation of (5) becomes:
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
>
≠∧<
−+
=∧
<
=
)(),(
),()(),(
)),(),,((*)1(),(*
),(
)(),()),(),,((
),(
WthyxEif
yxBWthyxEif
yxyxyxB
yxB
WthyxEifyxyx
y
xB
F
F
F
F
φ
φ
σμββ
φ
σμ
(6)
The parameter β is the classic updating parameter
introduced in several works on background
subtraction (Kanade et al., 1998, and Toyama et al.,
1999). It allows to update the existent background
model values to the new light conditions in the
scene. A dynamic termination criteria is introduced:
the modeling procedure stops when a great number
of background points have meaningful values:
0)),((# ≅
=
φ
yxB
F
(7)
This approach has been improved in order to
distinguish movements of the background objects
from foreground objects. Because of in sport scene
analysis probably this generalization is redundant,
this improvement has not been used in our
experiments, so it is not reported here. However this
upgrade makes the segmentation procedure more
general, and suitable for being applied in each kind
of motion detection problem.
3 FEATURES EXTRACTION AND
DISTANCE SELECTION
After the segmentation of actors, it is necessary to
correctly assign them to the relative classes; to make
it, a feature vector is extracted from each actor, and
provided to a classification phase. These features
must be able to discriminate the different classes of
interest. In this way a class is represented by a point
in the multidimensional feature-space: the
performance of the system is obviously strictly
dependent on the selected features. A wrong choice
of the multidimensional space can make the data not
separable, preventing any useful classification. The
selected features need to offer a wide discrimination
capability at the minimum computational cost.
Histograms in the RGB color space are a good trade-
off between these requisites. Color histograms
present a lot of advantages, first of all the
independence from the posture of players and their
scale factor, as remarked in the next sections. In
particular, to obtain more stable results with respect
to scaling, we have chosen to effect an area
normalization of histograms: In this way the
histogram shapes remain substantially unchanged;
but it is possible to obtain a smoothing of the
histograms that can reduce interclass variations. The
advantages obtained by normalizing are
compensated by the greater proximity of feature
vectors in the multidimensional space that makes
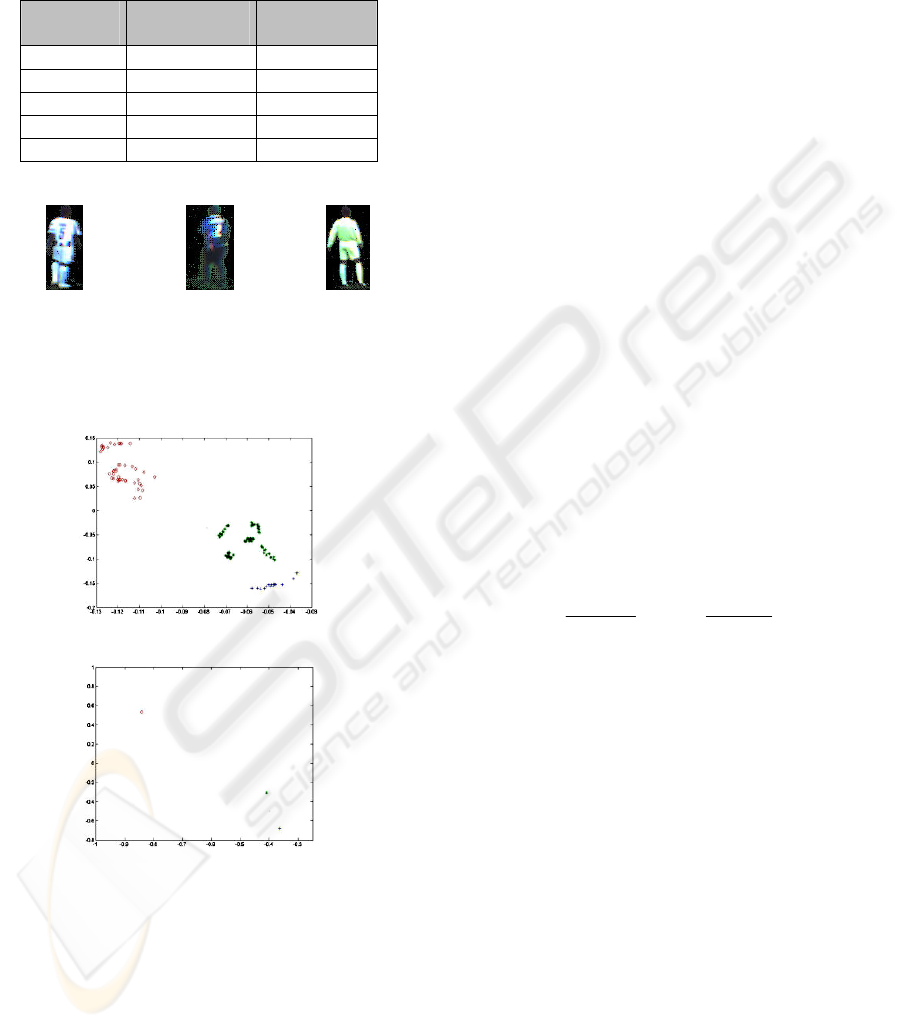
harder the correct clustering. In fig. 1 normalized
histograms of three different actors in a soccer
matches are plotted.
Player team A
Player team B
Referee
Figure 1: Three patches of different actors, and the relative
normalized histograms.
Using the selected features, images become
points in a feature space and the class recognition
can be seen as a clustering problem. In a generic
clustering algorithm it is necessary to define a metric
as a way for estimating the “proximity” of two
items, according to the selected features. The
selected measurement is the Manhattan distance:
∑
=
−=
l
1i
iii1
yxw),(d yx
(8)
UNSUPERVISED ALGORITHMS FOR SEGMENTATION AND CLUSTERING APPLIED TO SOCCER PLAYERS
CLASSIFICATION
131

where x and y are the histograms (with values x
i
,
y
i
) and w
i
are the weight coefficients. In this context
there is no difference in significance of vector
elements so all weights have been set to 1. This
proximity measurement has the advantage of being
simple and fast with respect to other more complex
distances (such as the Euclidean one).
4 CLASSIFICATION
The classification procedure is composed by two
steps: firstly, during a training phase, the classes are
created by means of a clustering algorithm based on
a modified version of the BSAS algorithm; it is an
unsupervised approach, so it is substantially
independent from human interaction. Then, at
runtime, each object detected by the segmentation
procedure is assigned to one of the classes
previously extracted. So, it is clear that the most
important step is the clusters creation procedure: an
erroneous clusterization of the feature space will
provide a wrong classification of actors.
For the clusters building phase, a training set is
created by adding a certain number of objects
randomly selected. Each object is represented by its
normalized histogram, as explained in the previous
section; after the creation of the training set, it is
examined by the BSAS algorithm with the goal of
detecting the interest classes.
BSAS is a very basic and simple clustering
algorithm; vectors are presented only once and the
number of clusters is not known a priori. What is
needed is the similarity measure d(x,C), a threshold
th on this measure, and the number of maximum
clusters allowed q. The idea is to assign every newly
presented vector to an existing cluster or create a
new cluster for this sample, depending on the
distance to the already defined clusters. More details
about this algorithm can be found in [7].
Different choices for the distance function lead
to different results and unfortunately the order in
which the samples are presented can also have a
great effect to the final result. What’s also very
important is the value of th. If th is too small,
unnecessary clusters are created, and if too large a
value is chosen less than required number of clusters
are formed.
In our implementation we have lightly modified
the classic version of the algorithm. In particular, we
have chosen to fix the threshold th to a small value,
that is increased if the number of detected cluster
exceeds the predefined value q. In this way the
algorithm converges to the correct cluster
configuration with the best (smallest) value of th.
Moreover, in order to smooth the dependence from
the order in which the samples are presented, a
merge procedure is carried out on the output
clusters, using th as a merge threshold: if the
distance between two clusters is less than th, then
they are merged, and the clustering procedure is
started again. If the algorithm is not able to detect a
consistent number of clusters, a new training set is
built, and the whole training procedure is repeated. It
happens, for example, if the training set in composed
only by actors belonging to the same class (players
of the same team). At runtime, for each actor
selected by the segmentation procedure, the relative
feature vector is compared with the representatives
of each clusters (also called prototypes); the distance
(7) is used again to select the winner class. After
this, the winner prototype is updated in order to
adapt itself to the variations in light conditions; this
updating is carried out by means of a weighed mean
between the actual value of the prototype for the
(winner) class k and the feature vector of the
classified object, as follow:
)(
1
1
VCw
w
C
kk
k
k
+
+
=
(9)
where C
k
has to be intended as the prototype of
the cluster k, V is the feature vector of the examined
objects, and w
k
is the weigh of the cluster k, i.e. the
number of objects classified as belonging to the
cluster k before then.
This procedure for the classification of players
has a great number of advantages with respect to the
other proposed in literature. First of all, it is very fast
and can be implemented in real time systems.
Moreover, it works well in RGB color space, so it is
not necessary to convert images in another color
space, as HSI. Finally, the proposed approach is
totally unsupervised, and no human interaction is
required for the creation of the cluster and the
classification.
5 EXPERIMENTAL RESULTS
AND CONCLUSIONS
We have tested the proposed algorithms on different
sequences acquired during real soccer matches of the
Italian Serie A, in different conditions, in presence
of both natural and artificial lights. The images used
for our experiments are provided by a static camera
pointed at the middle of the field. So only a max of
three classes of objects will be present (player of the
two teams, and referee); however, this is a limit
strictly related with the experimental setup adopted,
and it doesn’t depend from the implementation of
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
132
the algorithm, that can work reliability even in
presence of a greater number of classes.
Table 1: Evaluation of the capability of the clustering
procedure to correctly detect the required clusters.
Test
Sequence
Training Set
Ground Truth
Detected
clusters
A
3
3
B 2 2
C 3 3
D 3 2
E 2 2
a b c
Figure 2: examples of actors from the sequence D: player
of team A (a), player of team B (b) and referee (c);
clusters (a) and (c) are similar, and the algorithm is not
able to correctly distinguish them.
a – spatial distribution of feature vectors
b – position of representatives of clusters
Figure 3: The spatial distribution of feature vectors for the
test sequence C (a) and the position of the representatives
of the three clusters founded by the algorithm
The first experiment regards the reliability of the
class detection phase, i.e. the capability of the
clustering algorithm to find the correct classes of
objects belonging to the training set. In table 1 we
propose the output of experiments carried out on 5
different matches (from A to E). As it can be noted,
in 4 experiments the algorithm has correctly detected
the clusters: the number of detected clusters matches
with the number of cluster that composed the
training set (ground truth). Only for the sequence D
the algorithm finds a number of clusters less than the
ground truth. In fig. 2 some patches extracted from
the training set for that experiment are represented :
due to the light conditions, images are saturated and
patches related to the team A and patches related to
the referee are very similar, and the clustering
algorithm has not distinguished them.
In order to give a visual representation of such
experiment, in fig. 3-a we have plotted the spatial
distribution of the training set for one of the test
sequence above mentioned (in particular the
sequence C). It appears evident that feature vectors
are well separated, and the clustering algorithm here
proposed have found three clusters, as reported in
table 1; the positions of representatives of the three
clusters in the feature space are plotted in fig 3-b.
The main aim of the second experiment is to give
a quantitative evaluation of the performance of the
whole classification procedure. To do it, we have
manually built the ground truth by labelling actors in
the scene on the basis of their class (player team A,
team B, and referee). The results proposed in table 2
depending on both the clusters building phase and
the effective classification phase (minimum distance
criteria). For each test sequence the performances of
the algorithms are presented in term of the detection
rate (DR) and false alarm rate (FAR), as proposed in
several works:
F
N
T
P
TP
DR
+
=
F
P
T
P
FP
FAR
+
=
(10)
where TP (true positive) are the actors correctly
classified; FP (false positive) are the objects
classified as belonging to the examined class while
in the ground truth they correspond another class;
and FN (false negative) are objects of a certain class
not correctly classified. In table 2 we can see the
summarization of the results obtained on the test
sequences after a manual segmentation of the ground
truth. It can be noted that the FAR parameter is
always under the 6%, while the detection rate is
always over 90%. The worst results have been
obtained in the sequence D: as reported in the
previous experiment (see table 1 and fig. 2) this
sequence is very hard to handle because of the
similarity between the shirts of the referee and
players of one team, as remarked previously (see fig.
2).
UNSUPERVISED ALGORITHMS FOR SEGMENTATION AND CLUSTERING APPLIED TO SOCCER PLAYERS
CLASSIFICATION
133
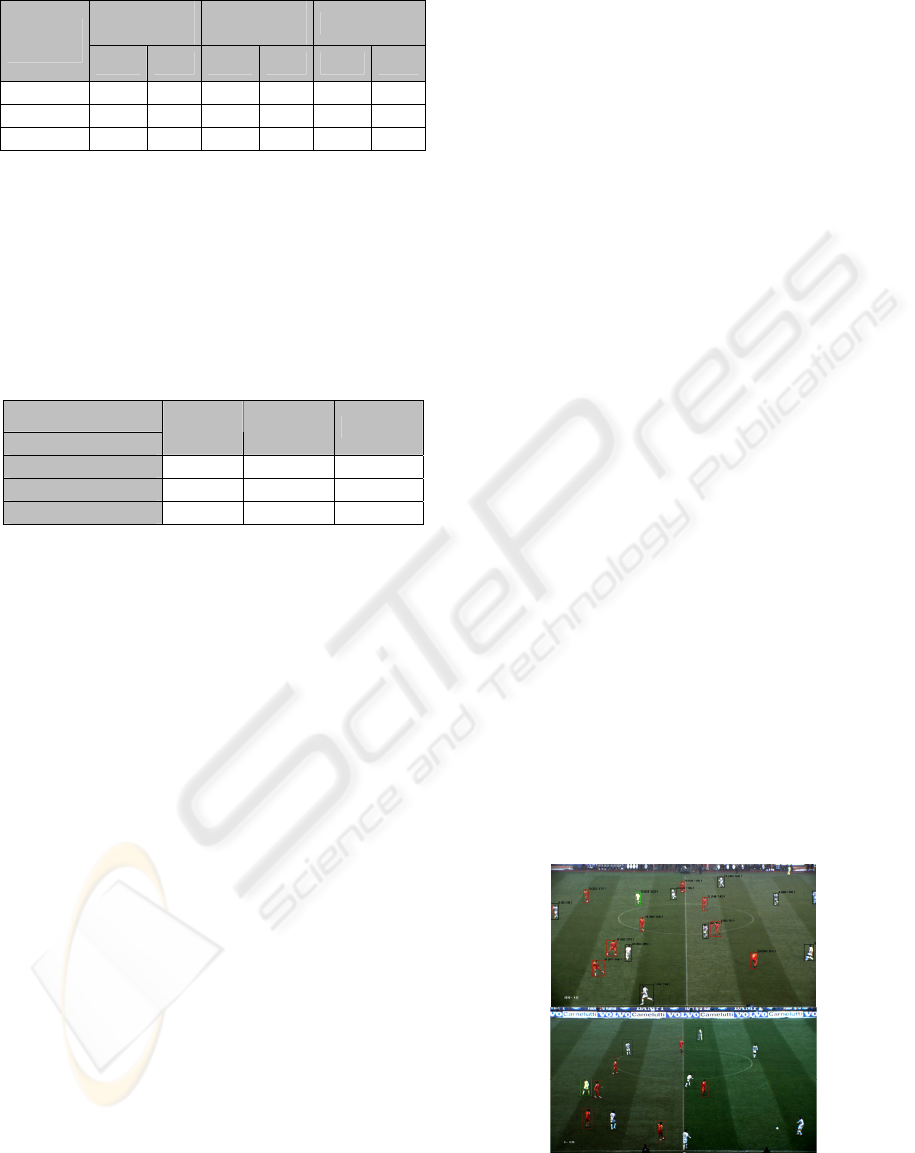
Table 2: Rates to measure the confidence.
Player
Team A
Player
Team B
Referee
Test
sequence
DR FAR DR FAR DR FAR
A 94.55 2.45 98.33 3.11 93.72 4.33
C 93.34 3.55 97.61 2.98 94.16 3.07
D 82.21 8.83 91.22 3.09 78.26 9.03
In order to give a more detailed analysis of the
results, in table 3 the confusion matrix relative to the
test sequence D is represented. As evident by
examining this table, players of the team B are
substantially correctly classified. Otherwise, the
players of team A and referee are often misclassified
(in the table we have bolded values relative to these
misclassification).
Table 3: Confusion Matrix for the sequence D-1 (in %).
This situation is due to the similarity between
these two classes, as evident seeing fig. 2: even if for
the human observer they are different, for the
classifier they are similar; probably it is due to the
feature vectors: another feature extraction procedure,
more refined, probably could improve the results. In
fig. 4 some images from the test sequences of our
experiments can be seen. We have used bounding
box of different color for each different class.
As a future work, we are testing different kind of
features that could provide information about the
spatial distribution of color instead of the simple
spectral distribution information typical of
histograms. Moreover, we are testing different
clustering algorithms in order to select the most
reliable for this applicative context.
REFERENCES
Assfalg, J., Bestini, M., Colombo, C., Del Bimbo, A.,
Nunziati, W. , 2003. Semantic annotation of soccer
videos: automatic highlights identification, in CVIU
92(2) pp. 285-305.
Zhang, Di, Chang, S.F., 2004. Real-time view recognition
and event detection for sports video, in J. Vis.
Commun. Image r. 15, pp. 330-347.
LeXing Xie, Peng Xu, Shih-Fu Chang, Divakaran, A.,
2004. Structure analysis of soccer video with domain
knowledge and Hidden Markov Models, in Patt. Rec.
Lett. 25 pp. 767-75.
Ekin, A., Tekalp, A.M., Mehrotra, R., 2003. Automatic
soccer video analysis and summarization, in IEEE
Trans. on Image Processing, 12(7), pp 796-807
Kanade, T., Collins, T., Lipton, A., 1998. Advances in
Cooperative Multi-Sensor Video Surveillance, in
Darpa Image Und. Work., Morgan Kaufmann,pp.3-24.
Toyama, K., Krumm, J., Brumitt, B., Meyers, B., 1999.
Wallflower: Principles and practice of background
maintenance, in ICCV, pp. 255-261
Theodoridis, S., Koutroumbas, K., 2003. Pattern
Recognition, Academic Press, San Diego, ISBN 0-12-
686140-4.
Naemura, M., Fukuda, A., Mizutani, Y., Izumi, Y.,
Tanaka, Y., Enami, K., 2000. Morphological
Segmentation of Sport Scenes using Color
Information, in IEEE Tr. on Br.,46(3) pp.181-8.
Misu, T., Gohshi, S., Izumi, Y., Fujita, Y., Naemura, M.,
2004. Robust tracking of athletes using multiple
features of multiple views, Journ. of WSCG, vol.12, 1-3
Xu, M., Orwell, J., Lowey, L., Thirde, D., 2005.
Architecture and algorithms for tracking football
players with multiple cameras, in IEE Proc. Vis. Im.
and Sign. Proc,152 (2) pp.232-41.
Xu, Z., Shi, P., 2005. Segmentation of players and team
discrimination in soccer videos, in IEEE int. Work.
VLSI Design & Video Tech., May 28-30, Suzhou,
China.
Mathes, T., Piater, J., 2005. Robust Non-rigid Object
tracking using Point Distribution Models, in BMVC
Vandenbroucke, N., Macaire, L., Postaire, J.G., 2003.
Color image segmentation by pixel classification in an
adapted hybrid color space. Application to soccer
image analysis, CVIU(90), 2, pp. 190-216.
Ekin, A., Tekalp, A.M., 2003. Robust dominant color
region detection and color-based applications for
sports video, in ICIP (1), pp. 21-24.
Yu, X., Sen Hay, T., Yan, X., Chng, E., 2005. A Player-
Possession Acquisition System for Broadcast Soccer
Video, in ICME July, 6-8, Singapore, pp. 522-525.
Beetz, M., Bandouch, J., Gedikli, S., 2006. Camera-based
Observation of Football Games for Analyzing Multi-
agent Activities, in Proc. of AAMAS, pp. 42-49.
Figure 4: Output images after the classification phase:
boxes of the same colours refer to players classified as
belonging to the same team.
Ground truth
Output results
Player
team A
Player
team B
Referee
Player team A 82.21 5.12 17.92
Player team B 4.33 91.22 3.82
Referee 13.46 3.66 78.26
SIGMAP 2007 - International Conference on Signal Processing and Multimedia Applications
134
