
A VIRTUAL REALITY SYSTEM FOR MEDICAL IMAGING
Giuseppe De Pietro, Ivana Marra and Carmela Vanzanella
Institute for High-Performance Computing and Networking, CNR, Via P. Castellino111, Naples, Italy
Keywords: OSG, Immersive Medical Imaging, VR Juggler, 3D interaction.
Abstract: In recent years significant advances in the field of Immersive Medical Imaging Analysis have made it
essential to many disciplines related to medicine, such as radiology, neurology, cardiology, radiotherapy.
Starting from three dimensional (3D) image datasets produced by computed tomography (CT) or magnetic
resonance imaging (MRI) scans, for these areas it can be very useful to use simulated visualizations of
human organs. By viewing the inside of anatomical structures and interacting with them, doctors can better
understand the data of interest for medical training, surgical simulations, examination and diagnosis aims.In
this paper we present a virtual reality system, that involves new software components based on top of open-
source and cross-platform libraries; it consists of a set of services implementing immersive 3D navigation
and interaction of virtual representations of human organ structures, starting from DICOM data.
These features have been developed to be integrated into a medical imaging component-based architecture,
which at present is under development.
1 INTRODUCTION
The field of Virtual Reality for Medical Image
Analysis has been strongly investigated over the past
decade. Innovations in imaging and immersive
technologies and techniques have enabled many
improvements in 3D visualization of complex
anatomical models (Bartz, 2005
). However, existing
software tools have only basic support for
interaction and immersive features. Moreover, many
commercial applications for medical imaging are
platform dependent and freeware ones are often
developed for specific fields of medicine on the top
of proprietary libraries (Rosset, Spadola, Ratib,
2004
) so to make it difficult to easily implement new
features when needed.
In this paper we propose an implementation of
an open-source software components system able to
provide immersive visualization and interaction with
3D models (Angel, 2002) which are reconstructed
from DICOM image series (Suetens, 2002
); the
system is essentially based on Open Scene Graph
(OSG www.openscenegraph.org) and Virtual
Juggler (VR Juggler www.vrjuggler.org) open-
source and cross-platform libraries.
OSG is a graphic library used to organize data
into scene graph structures, and to provide a set of
methods to efficiently handle 3D models. VR
Juggler allows to visualize, navigate and interact
with 3D models through different devices such as
data gloves, HMDs, sensors, and any Immersive
Projection Technology (IPT).
The developed system provides some of the most
used medical imaging functionalities such as the
selection of Region of Interest (ROI), Segmentation,
Co-Registration, Fusion and measurements on the
synthetic model, besides standard 3D visualization
and interaction features.
Another important characteristic of the
developed system is that it can be easily integrated
within the most popular freeware medical imaging
visualization toolkits.
Moreover, we developed a set of OSG-based VR
Juggler components which invoke some OSG
classes methods in order to encapsulate the
advanced features of both libraries.
The virtual reality system is based on a set of
components which have been tested by integrating
them into a software architecture we developed for
medical imaging applications (Von Rymon-Lipinski,
215
De Pietro G., Marra I. and Vanzanella C. (2007).
A VIRTUAL REALITY SYSTEM FOR MEDICAL IMAGING.
In Proceedings of the Second International Conference on Computer Graphics Theory and Applications - AS/IE, pages 215-220
DOI: 10.5220/0002075002150220
Copyright
c
SciTePress
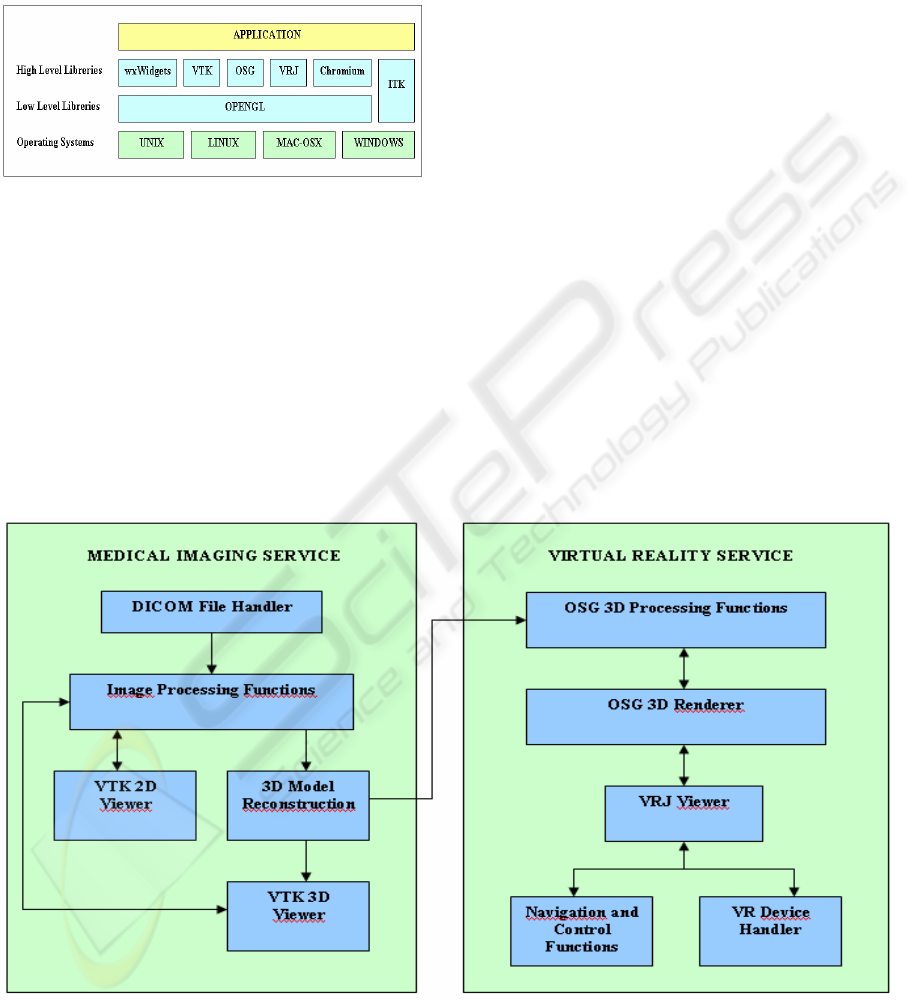
Jansen, Hanssen, Lievin, Keeve, 2002). This architecture, which is shown in figure 1, is based on
open-source and cross-platform libraries,
combined and extended in order to support medical
imaging processing, basic 3D visualization and
interaction functionalities.
Figure 1: Software Architecture for Immersive Medical
Imaging Applications.
In particular, wxWidgets is used for GUI
implementation, VTK for 2D and 3D visualization,
while ITK for realizing image processing
functionalities.
In addition, if virtual reality is required, the Open
Scene Graph toolkit is used to organize data into
scene graph structures, and the VR Juggler
framework to provide the necessary interface to
virtual reality devices.
Additional C++ code provides efficient
integration of the above mentioned libraries and
adds new functionalities.
2 SYSTEM ARCHITECTURE
OVERVIEW
As said in the previous section, we are currently
developing a component-based framework for
immersive medical imaging, which essentially
implements two services (fig. 2):
1) the Medical Imaging Service,
2) the Virtual Reality Service
The first service provides the user with typical
functionalities for visualization and image
processing of medical data coming from DICOM
images, such as segmentation, co-registration,
fusion, and ROI.
Moreover, 3D models can be reconstructed both
through a surface and direct volume rendering.
Figure 2: Component-based Architecture.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
216
The Virtual Reality Service gives the user all the
functionalities for immersive visualization and
interaction with the 3D model (Forsberg, Kirby,
2000). This service consists of five components:
1) the VRJ Viewer which is the component
for immersive visualization of the synthetic model.
It provides functionalities for different navigation
devices, active and passive stereoscopic systems,
and cave systems;
2) the OSG 3D Renderer which provides
both surface rendering and direct volume rendering
algorithms, to be applied on the model deriving from
the 3D reconstruction of volumetric data. It has been
designed and implemented as an independent
module from the VRJ Viewer, because they usually
need different computational resources;
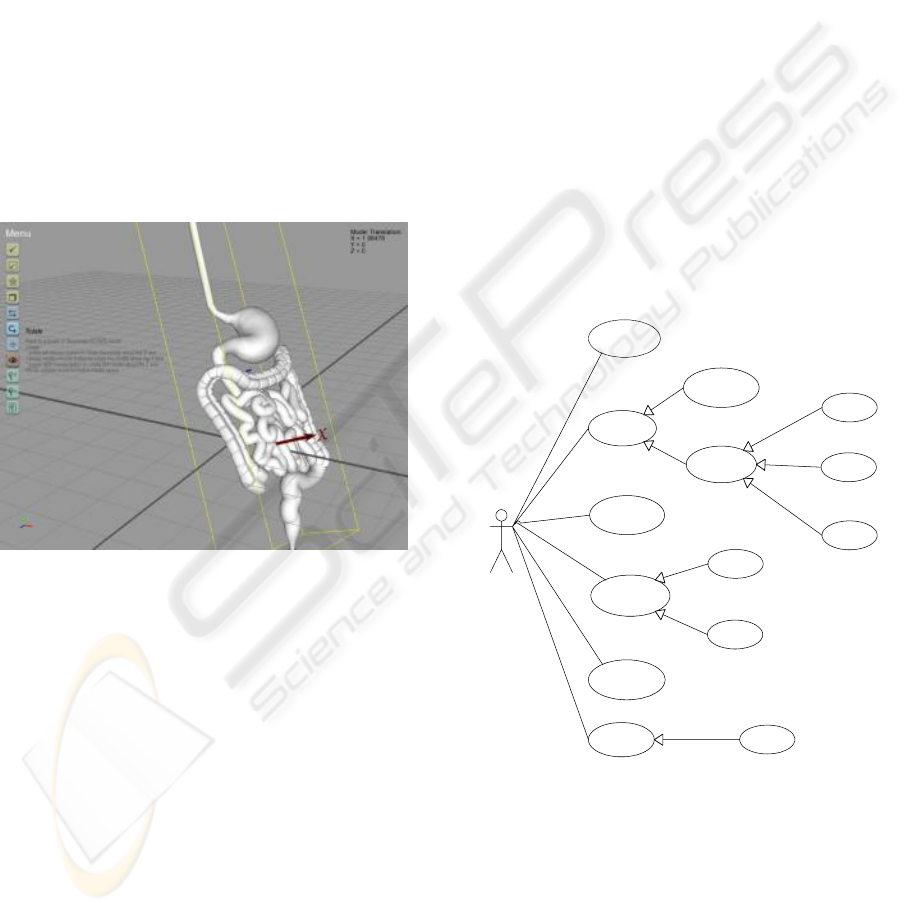
Figure 3: OSG user-interface.
3) the OSG 3D Processing Functions is the
key component of the Virtual Reality Service.
Through a user-friendly interface (fig. 3) it is
possible to choose among several functionalities,
such as 3D model transformations, component
selection, bounding box extraction. All of them
allow the user to directly interact with the synthetic
scene, so to select a part of the object, to move the
camera in any direction within the scene, zoom in
and out, pan left or right, or change the 3D model
coordinates;
4) the Navigation and Control Functions
component which gives all the functionalities to get
a natural real-time interaction with the virtual
environment. A user can navigate around a virtual
scene using a control menu, through some pointing
device. For this aim we have used the VR Juggler
configuration manager paradigm combined with
OSG setting parameters, so to allow the application
to run in the virtual system described in the
following section;
5) the VR Device Handler supplies an
interface to easily integrate most of commonly used
virtual reality devices (HMD, Data Gloves, MoCap,
mouse, joystick, etc.) into applications. It is based
on the VR Juggler proxy paradigm, which hides
hardware details of the selected devices.
The above illustrated components offer the end-
user many functionalities, as described in the use-
case diagram of figure 4.
The most important ones are:
1. Navigate 3D world
2. Render mode
3. Transform object
4. Show bounding box
5. Show object
User
navigate 3D world
render mode
stereoscopic mode
transform object
show bounding box
show object
volume rendering
surface rendering
move
rotate
component
point
wireframe
fill
Figure 4: Use Case Diagram.
The Navigate 3D world allows the user to move
through a scene modifying its point of view by
implicitly changing camera movements. Moreover,
it is possible, with the same mechanism, to
implement rotate pan and scale functions.
The Render mode function allows to select
between two rendering techniques: Volume and
Surface. In particular, for Surface rendering it is
A VIRTUAL REALITY SYSTEM FOR MEDICAL IMAGING
217
vrj::App
vrj::GlApp
vrj::OsgAppMenubar
osg::Referenced
osg::NodeVisitorosg::Object MenuCommandCallback
MenuCallback
BoundingBoxEstractor
osg::Drawable osg::NodeCallback osg::Drawable::EventCallback
RefAxes RefGrid
osgGA::GUIEventHandler
TransformManager PickHandler
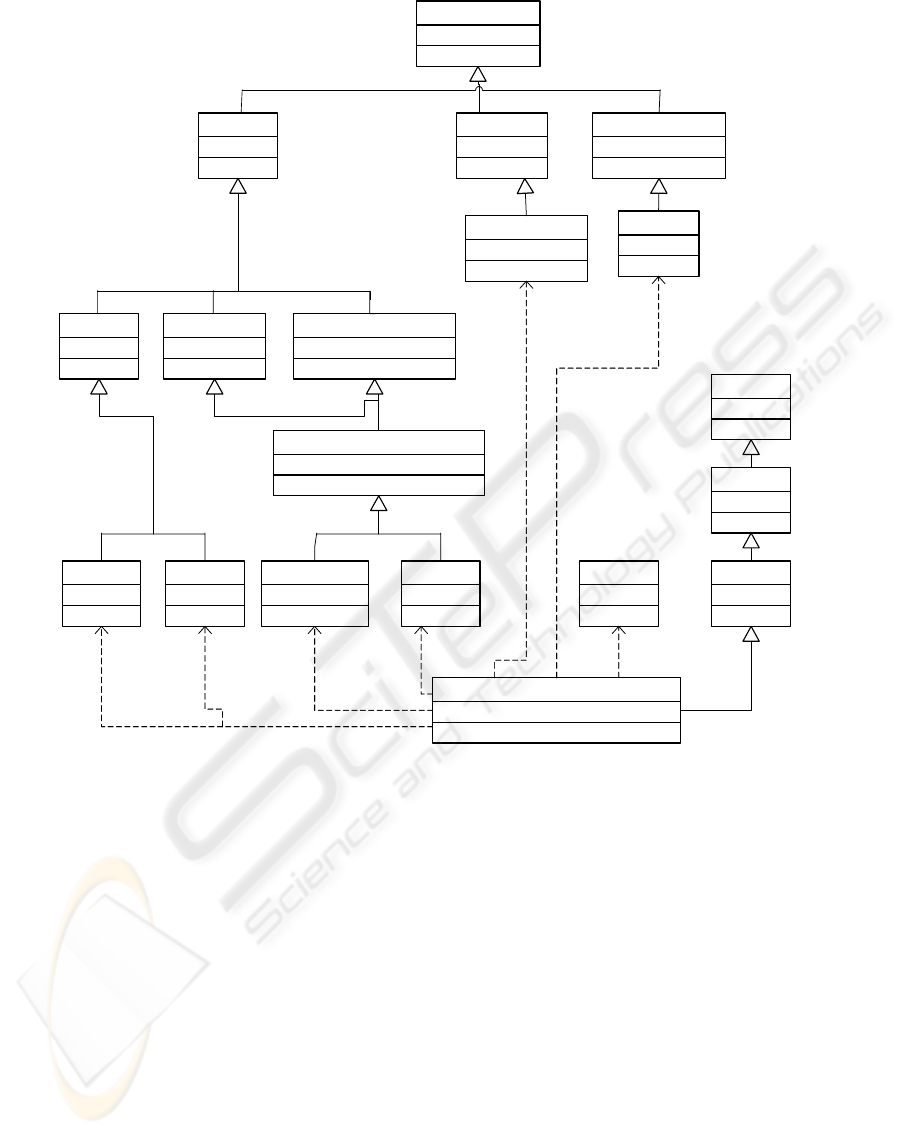
Application
Figure 5: Component Class Diagram.
possible to select between three representations
(point, wireframe, fill) in order to visualize a 3D
model from abstraction level of detail.
The Show bounding box functionality is used to
optimize geometrical operations by using simple
volumes to contain more complex objects and it is
useful to show the actual size of a partially visible
part of the model from the actual angle-shot.
The Transform object refers to the geometric
manipulation process of the object transform matrix,
and allows to modify the object coordinates to
translate and rotate itself. It should be noted that
such transformations are different from the
Navigation ones because they are linked to the
object itself and not with the camera.
Once the model has been loaded, the user
through the Show object use case can choose an
object within the scene and interact with it.
3 SOFTWARE
IMPLEMENTATION
The Visualization and Interaction Components of
Virtual Reality Service, presented in the previous
section, have been implemented in C++; many
support classes derive from OSG and VR Juggler
libraries. We tested the implementation of the two
software services, the Medical Imaging Service and
the Virtual Reality Service, by using some DICOM
image data sets, coming from MRI and CT scans.
The modular approach used for the implementation
is strongly related to Scene Graph (SG) data
structure, which is used to efficiently represent
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
218

complex scenes in the graphical environment. In
figure 5 the diagram of the main classes, used to
develop software components, is shown. Most of
these classes can be grouped into three categories:
A) Basic Graphic Classes, which provides
methods for graphic interfaces and for setting
environmental graphic options;
B) Events Classes, which includes all the classes
used to handle events generated by user’s
commands;
C) Application Class, which includes the
methods to properly integrate OSG and VR Juggler
libraries
3.1 Basic Graphic Classes
BoundingBoxExtractor class calculates the bounding
boxes of all objects in the scene during the traversal
of the scene graph. The user can select an object and
visualize its bounding box to define a bounding box
of a scene graph.
MenuBar is used to generate the graphical menu
with push-buttons. When an instance of this class is
created, it executes one or more calls to the
addButton () method specifying the data of the push-
buttons to be added; therefore the buildSceneGraph
() method is called in order to generate the subgraph
of the menu. At this point the instance of the
MenuBar class can be destroyed;
RefAxes class is responsible for the visualization
of the reference axes. It inherits from osg::Drawable
class which allows to design geometries
compounded by lines, triangles, etc. An instance of
this class visualizes a system of three orthogonal
axes in the left inferior angle of the window. The
guideline of the axes is calculated for every frame
and is updated according to camera orientation;
RefGrid class allows the visualization (if
required) of the reference grid. Like RefAxes class it
inherits from osg::Drawable class. Instance of this
class visualizes a grid with variable dimension and
step, layered on a plane with z=0.
3.2 Event Classes
MenuCommandCallback is a virtual class in which
are defined the virtual methods for activate or
disable the menu commands.
MenuCallback class inherits from the previous
class and implements the virtual methods enable()
and disable() which are called by an activation/de-
activation action from the menu.
PickHandler class intercepts the mouse events to
make possible the selection and the highlighting of
the nodes of interest of the 3D model. This is
obtained through Application::selectNode() and
Application::highlightNode() methods.
TransformManager class manages the
transformations (translation and rotation) on the 3D
model. It is an event handler that concurs to modify
the transformation matrix of a MatrixTransform
node. These modifications are performed according
to the user input device movements.
3.3 Application Class
A very important class, which is not included in the
previously mentioned class categories is the
Application class.
Application is the core class of the whole
system. Through the vrj::App interface, the VR
Juggler kernel runs an instance of the class and
manages all the computations required by the user
inputs, updates consequently the 3D scene and can
detect collisions among the objects.
In order to have an integrated use of OSG and
VR Juggler, the Application class implements the
vrj::OsgApp::initscene() method which initializes
the SG structure, that represents all the 3D scene
elements. The currently active SG is accessed
calling the vrj::OsgApp::getScene() method
whenever it is required (i. e. for rendering or
updating aims).
4 SYSTEM PROTOTYPE
We developed a first prototype of the Virtual Reality
System implementing the software architecture
described in section 2.
This prototype includes the following hardware
devices:
a graphical bi-processor workstation;
a Stereoscopic Video Projection System,
with two DLP 3000ANSI LUMEN
projectors and a 1,5X2 Mt screen;
a HiRes900 Cybermind Head Mounted
Display;
an HP iPAQ hx2490 Pocket PC with PDA
functionalities.
A VIRTUAL REALITY SYSTEM FOR MEDICAL IMAGING
219

Figure 6: VR System.
In figure 6 it is shown the application used for
testing the whole system. It consists of immersive
stereoscopic visualization of a 3D model
representing a human gut obtained from a series of
DICOM slices acquired as CT datasets scans.
Through a PDA, the user is able to navigate and
interact with the model in a very user-friendly
manner.
5 CONCLUSIONS AND FUTURE
WORK
In this paper we presented a system for immersive
medical imaging.
It is based on visualization and interaction
components which have been realized on the top of
Open Scene Graph and VR Juggler open source
libraries, and integrated into a software architecture
for immersive medical imaging applications
currently under development.
The modularity of the Virtual Reality System can
allow an easy extension of its capabilities. At
present, we are working at the implementations of
some crucial medical imaging functionalities, such
as ROI, Segmentation and Image Fusion, so to make
them work directly on 3D model. In particular, to
reach this aim we are extending some VTK classes
with new methods, and integrating them directly into
VR Juggler, without switching between 2D and 3D
data representation, whenever some kind of 3D
model manipulation is required.
Finally, we are testing effective performance
improvements for highly complex scenes through
the parallelization (Bajaj, Ihm, Koo, 1999) of the
rendering phase.
REFERENCES
Dirk Bartz , “Virtual Endoscopy in Research and Clinical
Practice”ACM CCS: I.3.7 Computer Graphics:
Three-dimensional graphics and realism, J.3
Computer Applications: Life and Medical Sciences
Volume 24 (2005), number 1 pp. 111–126.
Rosset A., Spadola L., Ratib O., “OsiriX: an open-source
software for navigating in multidimensional DICOM
images”, Journal of digital imaging: the official
journal of the Society for Computer Applications in
Radiology., Springer-Verlang .
Von Rymon-Lipinski, B., Jansen, T., Hanssen, N., Lievin,
M., Keeve, E., 2002. A software framework for
medical visualization. In Poster Compendium of IEEE
Visualization_02, pp. 100–101.
P. Suetens, “Fundamentals of Medical Imaging”,
Cambridge University Press.
Andrew S. Forsberg, Robert M. Kirby, David H. Laidlaw,
George E. Karniadakis, Andries van Dam, and
Jonathan L. Elion.” Immersive virtual reality for
visualizing flow through an artery”. In Proceedings
Visualization ’00. IEEE Computer Society Press,
2000.
E. Angel, “Interactive Computer Graphics”, ed. Addison
Wesley.
Chandrajit Bajaj, Insung Ihm, Gee-Bum Koo, et al.
“Parallel Ray Casting of Visible Human on
Distributed Memory Architectures”, Proc on Data
Visualization '99.
GRAPP 2007 - International Conference on Computer Graphics Theory and Applications
220
