
STRUCTURED LIGHT BASED STEREO VISION FOR
COORDINATION OF MULTIPLE ROBOTS
Gui Yun Tian, Duke Gledhill
School of Computing & Engineering, University of Huddersfield, Huddersfield, England, HD1 3DH
Keywords: Active stereo vision, Robots and automation, Distributed system, Location, Image processing
Abstract: This paper reports a method of coordinating multiple robots for 3D
-object handling using structured light
based stereo vision. The system structure of using two robots (puma and staubli) for playing chess has been
proposed. The key techniques for surface reconstruction and rejection of ‘spike’ are discussed. The feature
of the active vision system for 3D object acquisition and their application for robotics and automation are
introduced. Following experimental studies, conclusion and further work have been derived.
1 INTRODUCTION
We want multiple robots to operate in unknown,
unstructured environments. To achieve this goal,
the robots must be able to perceive its environment
sufficiently to allow it operate with that
environment safely. Most robots that successfully
navigate in unconstrained environments use sonar
transducers or laser range sensors as their primary
spatial sensor ( Lim and Leonard 2000, Guivant
etc 2000). Although many indoor surfaces are
indeed specular, rough surface reflections can be
important in many environments. Incorporation of
echolocation constraints from rough surfaces is
more difficult because diffracted sonar returns
provide weaker geometric constraints than specular
sonar returns. Sonar barrier test may cause
problems in situations when there are unmodeled
objects present or when there are objects in the
model, which are no longer in the same positions
in the environment. Ultrasonic sensors have been
widely used in indoor applications, but they are not
adequate for most outdoor applications due to
range limitations and bearing uncertainties.
Stereovision has been the object of research in
m
a
ny important research laboratories around the
world. Recently, stereoscopic omni directional
systems were used in indoor localisation
applications (Drocout 1999). This type of sensor is
based on conical mirror and a camera that returns a
panoramic image of the environment surrounding
the vehicle. Although a promising technology, the
complexity and its poor dynamic range made this
technique still not very reliable for unstructured
environments, particularly handling mechanical
components where texture are not rich presented.
Because stereo vision mapping is very sensitive to
errors, as the process of collapsing the data from
3D to 2D encourages errors in the form of ‘spikes’
to be propagated into the map.
Our recent work on 3D Reconstruction of a
Reg
ion
of Interest Using Structured Light and
Stereo Panoramic Images has good results
(Gledhill etc 2004), where 360
0
C degrees of scene
and 3D of region of interest can be easily captured
and visualised. This paper focuses on the structure
of robot sensing systems and the techniques for
measuring and pre-processing 3-D data. To get the
information required for controlling a given robot
function, the sensing of 3-D objects is divided into
four basic steps: transduction of relevant object
properties (primarily geometric and photometric)
into a signal; pre-processing the signal to improve
it; extracting 3-D object features; and interpreting
them. Each of these steps usually may be executed
by several alternative techniques (tools). Tools for
the transduction of 3-D data and data pre-
processing are surveyed. The performance of each
tool depends on the specific vision task and its
environmental conditions, both of which are
variable. Such a system includes so-called tool-
boxes, one box for each sensing step, and a
supervisor, which controls iterative sensing
158
Tian G. and Gledhill D. (2004).
STRUCTURED LIGHT BASED STEREO VISION FOR COORDINATION OF MULTIPLE ROBOTS.
In Proceedings of the First International Conference on Informatics in Control, Automation and Robotics, pages 158-161
DOI: 10.5220/0001139401580161
Copyright
c
SciTePress
feedback loops and consists of a rule-based
program generator and a program execution
controller. The rest of the paper is organised as
follows. Section 2 introduces the system design of
vision based multiple robot applications; Section 3
discusses the 'spike' noise and its solution by using
structured light based vision system; Section 4
reports experimental studies and conclusion is
derived in session 5.
2 SYSTEM DESIGN
The aims of the projects are to build a multiple
robot networks, where all the robot locations and
the locations of targets can be monitored by their
individual active vision system on each robot in
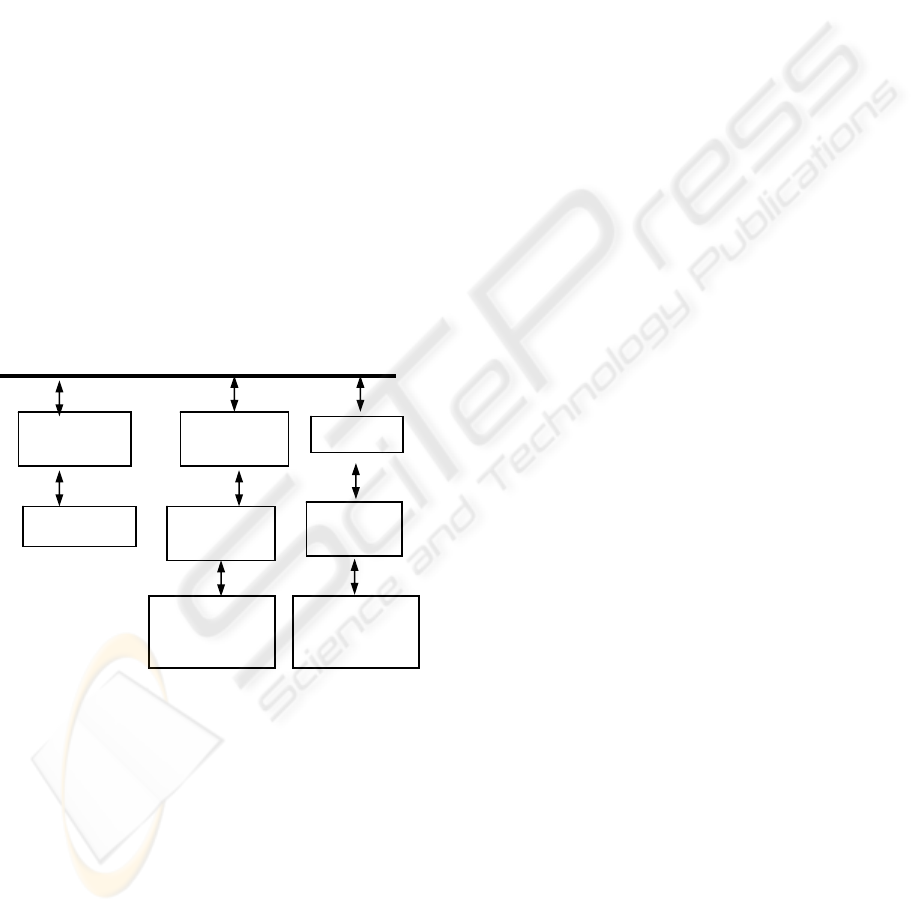
the systems. A system design of the distributed
system is illustrated in Fig. 1. The robots used are
a Staubli robot and a Puma robot in our lab. For
large scale of robot networks, a low cost vision
system will be developed. Therefore, we design
and develop a structured light based vision system,
where two webcams are used for each robot.
Figure 1: the system design of using structured light
based vision system for multiple robot control
3 STRUCTURED LIGHT BASED
STEREO VISION
Stereo vision normally uses correspondence
methods for 3D-reconstruction (
Nitzan 1988).
Correspondence methods are less accurate in areas
of low texture (
Murray and Jennings 1997, Xiao etc
2004, Tian etc 2003).
For example in an outdoor
environment where texture is in abundance
correspondence is very accurate, but an indoor
environment usually has walls, and indoor walls
usually have low texture, e.g. white paint. To
overcome this lack of texture, it is proposed that a
light pattern is projected onto the low texture areas
to aid the correspondence search. Once a texture
has been applied the correspondence algorithms
achieve higher accuracy results. For this system a
Gaussian noise pattern is produced. The image is
filtered to ensure that no two dark pixels are next
to each other, so that no ‘blocks’ of black are
produced. Large areas of black result in inaccurate
removal of the noise later. The structured light
pattern has to be dense enough to create a useable
texture for the correspondence algorithm, but with
small enough dots to be able to remove them for
visualisation. The result is then projected into the
environment. Fig. 2 shows an example of 'spike'
noise of 3D reconstructed object for a typical
mechanical part illustrated in Fig. 5. To overcome
the 'spike' noise, a structured light based stereo
vision system is developed as illustrated in Fig. 3.
The structured light can be laser light or any other
visible light, which will depend on the targets to be
handled or monitored as shown in Fig. 4.
The disparity results are validated in two ways.
First, there is a ‘sufficient texture’ test. This test
checks that there is sufficient variation in the
image patch that is to be correlated by examining
the local sum of the Laplacian of Gaussian of the
image. Low texture areas score low in this sum. If
there is insufficient variation the results will not be
reliable, thus the pixel is rejected because there
will be too much ambiguity in the matches. If there
is not a sufficient texture, a structured light is
exploited. Secondly, there is a ‘quality of match’
test, using structured light in particular. Rather
than regular pattern structured light, a random
Gaussian noise pattern is used, which can be easily
filter out by using median filters from the captured
images. Fig. 5. shows the flowchart of the image
reconstruction and understanding. In this test, the
value of the score is normalised by the sum of all
scores for this pixel. If the result is not below a
threshold, the match is consider to be insufficiently
unique and therefore a likely mismatch. This kind
of failure generally occurs in occluded regions
where the pixel cannot be properly matched
.
RX
controller
Computer
Other robots
Staubli
Robot
Puma robot
Controller
Structured
light based
vision system
Structured
light based
vision system
STRUCTURED LIGHT BASED STEREO VISION FOR COORDINATION OF MULTIPLE ROBOTS
159
Figure 2: 'Spike' noise
Figure 3: Structured light based stereo vision system
Figure 4: Alternative system with visible light instead of
laser light
Figure 5: A real-time stereo vision system
4 EXPERIMENTAL STUDIES
In the experimental studies, two images were
captured by two webcams displayed in Fig. 6. The
structured light was used due to lack of the texture
in the mechanical parts. The reconstructed 3D
image in Fig. 7 has much better quality than the
reconstructed 3D image without using structured
light in Fig. 2, where 'spike' noise existed. Through
the 3D-model acquisition systems, 3D objects as
illustrated in Fig. 8 can be perceived by robots.
The four images in Fig. 8 illustrate the different 3D
views from different viewpoints.
The active vision system with adaptable
structured light is uncalibrated 3D reconstruction.
Uncalibrated reconstruction of a scene is desired in
many practical applications of computer vision (Li
and Lu 2004). We present a method for true
Euclidean 3-D reconstruction using an active
vision system consisting of a pattern projector and
two low-cost cameras. When the intrinsic and
extrinsic parameters of the camera are changed
during the reconstruction, they can be self-
calibrated and the real 3-D model of the scene can
then be reconstructed. The parameters of the
projector are precalibrated and are kept constant
during the reconstruction process. This allows the
configuration of the vision system to be varied
during a reconstruction task, which increases its
self-adaptability to the environment or scene
structure in which it is to work.
The robot controllers will process the 3D
images and extract information about the target
pose and location, which are important for the plan
of actions e.g. gripper control for the robot
network. Further data fusion and communication
control about the system will be published in a
different paper.
Figure 6: The left and right images from the capture
system
Camera 1
Pattern
Pro
j
ecto
r
Camera 2
Left
Ima
g
e
Right
Ima
g
e
Derived
De
p
th
3D objects
Remove
pattern
from
image
Face
ICINCO 2004 - ROBOTICS AND AUTOMATION
160

Figure 7: The depth map from the stereo system
Figure 8: 3D images perceived by robots
5 CONCLUSION AND FURTHER
WORK
Stereoscopic systems for robot navigation and
robot networks are currently possible using
structured light and low-resolution real-time
devices. Although these devices don’t have the
same performances as the human depth perception
system, they seem efficient for simple applications
such as obstacle avoidance and co-ordination
control for multiple robots. The system is low cost
and easily implemented for autonomous systems.
The active vision system can adapt different
lighting environment and camera intrinsic and
extrinsic parameters by using our normalisation
algorithms (Finlayson and Tian 1999) and data
fusion from the redundancy data of the structured
light based stereo vision.
Until recently certain distributed systems
aspects of multi-robot teams were not given much
attention. A sensing approach has been proposed
for cooperative robotics. In the future, the system
will be integrated with panoramic stereo vision
systems for wide range of position monitoring
(Bunschoten and Kröse 2002). Further data fusion
for robot networks or sensor networks will be
investigated (Büker etc 2001).
REFERENCES
Büker U., Drüe S., Götze N., Hartmann G., Kalkreuter
B., Stemmer R. and Trapp R., 2001. Vision-based
control of an autonomous disassembly station,
Robotics and Autonomous Systems, Volume 35,
Issues 3-4, Pages 179-18.9.
Bunschoten R. and Kröse B., 2002. 3D scene
reconstruction from cylindrical panoramic images,
Robotics and Autonomous Systems, Volume 41,
Issues 2-3, Pages 111-118.
Drocout C., Delahoche L., Pegard C., Clerentin A.,
1999. Mobile robot localisation based on an
omnidirectional stereoscopic vision perception
system, Proc. Of the 1999 IEEE Conference on
Robotics and Automation, Detroit, USA, pp 1329-
1334.
Finlayson G D. and Tian G Y, 1999. Colour
normalization for colour object recognition”,
International J. of Pattern Recognition and
Artificial Intelligence, Vol.13, No.8, pp 1271-
1285.
Gledhill D., Tian G. Y., Taylor D. and Clarke D.,
2004,
3D Reconstruction of a Region of Interest
Using Structured Light and Stereo Panoramic
Images, accepted for IV04, London.
Guivant J., Eduardo Nebot E. and Baiker S., 2000.
Autonomous navigation and map building using
laser range senosors in outdoor applications, Journal
robotic systems, Vol 17, No. 10, , pp 565-583.
Li, Y.F., Lu, R.S., 2004. Uncalibrated Euclidean 3-D
Reconstruction Using an Active Vision System,
Volume: 20, Issue: 1, pp. 15- 25.
Lim J. H. and. Leonard J. J, 2000. Mobile Robot
Relocation from Echolocation Constraints, IEEE
Transactions on Pattern Analysis and Machine
Intelligence, Vol. 22, No. 9, pp. 1035-1041.
Murray D. and Jennings C., 1997. Stereo vision based
mapping for a mobile robot, In Proc. IEEE Conf. On
Robotics and Automation.
Nitzan D., 1988.
Three-Dimensional Vision Structure
for Robot Applications,
IEEE Transactions on
Pattern Analysis and Machine Intelligence
,Vol.
10, No. 3.
Tian, G. Y., Gledhill, D., Taylor, D., 2003.
Comprehensive interest points based imaging
mosaic.
Pattern Recognition Letters 24, (9-10):
1171-1179.
Xiao D., Song M., Ghosh B. K., Xi N., Tarn T. J. and
Yu Z., 2004. Real-time integration of sensing,
planning and control in robotic work-cells, Control
Engineering Practice,
Volume 12, Issue 6, Pages
653-663.
STRUCTURED LIGHT BASED STEREO VISION FOR COORDINATION OF MULTIPLE ROBOTS
161
