
A Normative Agent-based Model for Sharing Data in Secure Trustworthy
Digital Market Places
Ameneh Deljoo
1
, Tom van Engers
2
, Robert van Doesburg
2
, Leon Gommans
1,3
and Cees de Laat
1
1
Institute of Informatics, University of Amsterdam, Amsterdam, The Netherlands
2
Leibniz Center for Law, University of Amsterdam, The Netherlands
3
Air France-KLM, The Netherlands
Keywords:
Normative Agent Based Model, Beliefs Desire and Intentions Agent, Simulation, Agent Based Modeling,
Jadex.
Abstract:
Norms are driving forces in social systems and governing many aspects of individual and group decision-
making. Various scholars use agent based models for modeling such social systems, however, the normative
component of these models is often neglected or relies on oversimplified probabilistic models. Within the
multi-agent research community, the study of norm emergence, compliance and adoption has resulted in new
architectures and standards for normative agents. Wepropose the N-BDI* architecture by extending the Belief-
Desire and Intention (BDI) agents’ control loop, for constructing normative agents to model social systems;
the aim of our research to create a better basis for studying the effects of norms on a society of agents. In
this paper, we focus on how norms can be used to create so-called Secure Trustworthy Digital Marketplaces
(STDMPs). We also present a case study showing the usage of our architecture for monitoring the STDMP-
members’ behavior. As a concrete result, a preliminary implementation of the STDMP framework has been
implemented in multi-agent systems based on Jadex.
1 INTRODUCTION
Norms
1
are an important key to understanding the
function of societies of agents, such as human
groups, teams, and communities; they are a ubiq-
uitous but invisible force governing many societies.
Bicchieri (Bicchieri, 2005) describes human norms
as:“the language a society speaks, the embodiments
of its values and collective desires, the secure guide in
the uncertain lands we all traverse, the common prac-
tices that hold human groups together.”
A normative agent refers to an autonomous agent
who understands and demonstrates normative behav-
ior. Such agents must be able to reason about the
norms with which they should comply and occasion-
ally violate them if they are in conflict with each other
or with the agent’s private goals (Luck et al., 2013).
For individual agents, reasoning about social norms
1
Norms play an important role in open artificial agent
systems; they have been said to improve coordination and
cooperation. As in real-world societies, norms provide us a
way to achieve social order and give raise for expectations
thus controlling the environment and making it more stable
and predictable.
can easily be supported within many agent architec-
tures. Dignum (Dignum, 1999) defines three layers of
norms (private, contract, and convention) that can be
used to model norms within the BDI framework. Cre-
ating realistic large-scale models of social systems is
impaired by the lack of good general purpose compu-
tational models of social systems. These models help
to analyze and reason about the actions and interac-
tions of members’ of such societies of agents that are
bound by norms.
A real-world social scenario where these concerns
clearly apply is in business relationships. In our re-
search, we are focusing on environments in which
agents may agree on cooperation efforts, involving
specific interactions during a certain time frame. This
way, agents compose any organizations (in this paper
STDMPs), which is regulated by the specific norms
agreed upon. Agents may represent different business
units or enterprises, which come together to address
new market opportunities by combining skills, re-
sources, risks, and finances that no partner can alone
fulfill (Dignum and Dignum, 2002). Any coopera-
tion activity requires trust between the involved part-
ners. When considering open environments, previous
290
Deljoo, A., Engers, T., Doesburg, R., Gommans, L. and Laat, C.
A Normative Agent-based Model for Sharing Data in Secure Trustworthy Digital Market Places.
DOI: 10.5220/0006661602900296
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 1, pages 290-296
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

performance records of potential partners may not be
assessable. In this paper a Trusted Electronic Institu-
tions agent (TEI) propose to mimic real-world institu-
tions, by regulating the interactions between agents.
The TEI agent concept is a coordination framework
that facilitating the establishment of contracts and
providing a level of trust by offering an enforceable
normative environment. The TEI agent encompasses
a set of norms regulating the environment.
This normativeenvironmentevolves as a consequence
of the establishment of agents’ agreements formalized
in contractual norms. Therefore, an important role of
the TEI agent is to monitor and enforce, through ap-
propriate services, both predefined institutional norms
and those formalizing contracts that result from a ne-
gotiation process. Agents rely on the TEI agent to
monitor their contractual commitments.
Previously, we presented the elements of a normative
architecture and the extension of the BDI agents for
sharing data case studies (Deljoo et al., 2016; Deljoo
et al., 2017). This paper describes an extended BDI
architecture for constructing and simulating norma-
tive effects on a social system such as STDMPs.
The aim of our research is to create a general pur-
pose Agent-Based Modeling (ABM) and simulation
system for studying how norms can be used to cre-
ate STDMPs and how we can monitor the effects of
norms on such system where each member’s of soci-
ety are self-governed autonomous entities and pursue
their individual goals based only on their beliefs and
capabilities (Gouaich, 2003).
This paper presents a study showing the relative con-
tribution of social norms on creating STDMPs and
predicting the impact of norms on the member’s
of the STDMPs. Our proposed model to simulate
STDMPs members’ behaviors and a detailed descrip-
tion is provided in Section 2. The norm description in
the STDMPs case study, accepting the partners’ re-
quest to share acceptable data with the partners after
checking compliancy with the General Data Protec-
tion Regulation (GDPR), presented in Section 4. Sec-
tion 3 presents the STDMP scenario and primarily im-
plementation of our model.
Although this paper focuses on STDMPs, we believe
our architecture is sufficiently general to study a vari-
ety of social scenarios. We conclude the paper with
the related work on normative agents and different
normative architectures.
2 N-BDI*
In a previous paper, we have presented an extension
of the BDI agents framework (Deljoo et al., 2017).
In the previous extension, agents need to select the
most appropriate plan when they have partial obser-
vations. To enable this we extended the agent planner
componentby integrating probabilities and utility into
the BDI agent’s planner component. Also in our fur-
ther extension described in this paper which we have
called the normative BDI* (N-BDI*) framework, the
agents have the ability to select the most appropriate
plans based on the highest expected utility that fulfills
the expectations of agents as well (see Algorithm 2).
We complete our extension in this paper by introduc-
ing N-BDI* architecture. The N-BDI* framework is
inspired by the nBDI framework from (Criado et al.,
2010). Their framework, like ours, is an extension
of the basic BDI agents. The nBDI framework con-
sists of two functional contexts: the Recognition Con-
text (RC), which is responsible for the norm iden-
tification process; and the Normative Context (NC),
which allows agents to consider norms in their deci-
sion making processes. One of the differences of our
N-BDI* framework compared to the nBDI is the way
the agents select the most appropriate plan. In our
framework we assign utility to each plan and select
the one that maximizes the utility. In the nBDI frame-
work, the authors did not consider the utility in the
agent’s planner.
In the nBDI framework the agent’s intention is equal
to the action of agent but in reality, which is reflected
in our agent framework,the intention is the different
component from the action component. After select-
ing a plan, the agent’s intention becomes to execute
that plan. In our architecture, before executing, the
agent checks its (institutional) Power to execute the
selected plan. The ability to actually execute the plan
is in social reality, and can be checked by the agent by
monitoring the effects of the selected action(s), even
in case they fail, and comparing these effects with the
intended effects. The explicit notion of institutional
powers and social abilities are not addressed in the
nBDI.
Belief revision in nBDI is based on the received feed-
back from the environment while in our extended N-
BDI* framework the belief revision happens with a
higher frequency, for example when the agent’s sen-
sor received data or when the most appropriate plan
has been selected.
Also, they considered two types of norms (Consti-
tutive and Deontic norms). In our work, we have a
norm representation based upon the work of Hohfel-
dian (Doesburg and Engers, 2016). The GDPR norms
described in this paper are represented in this way.
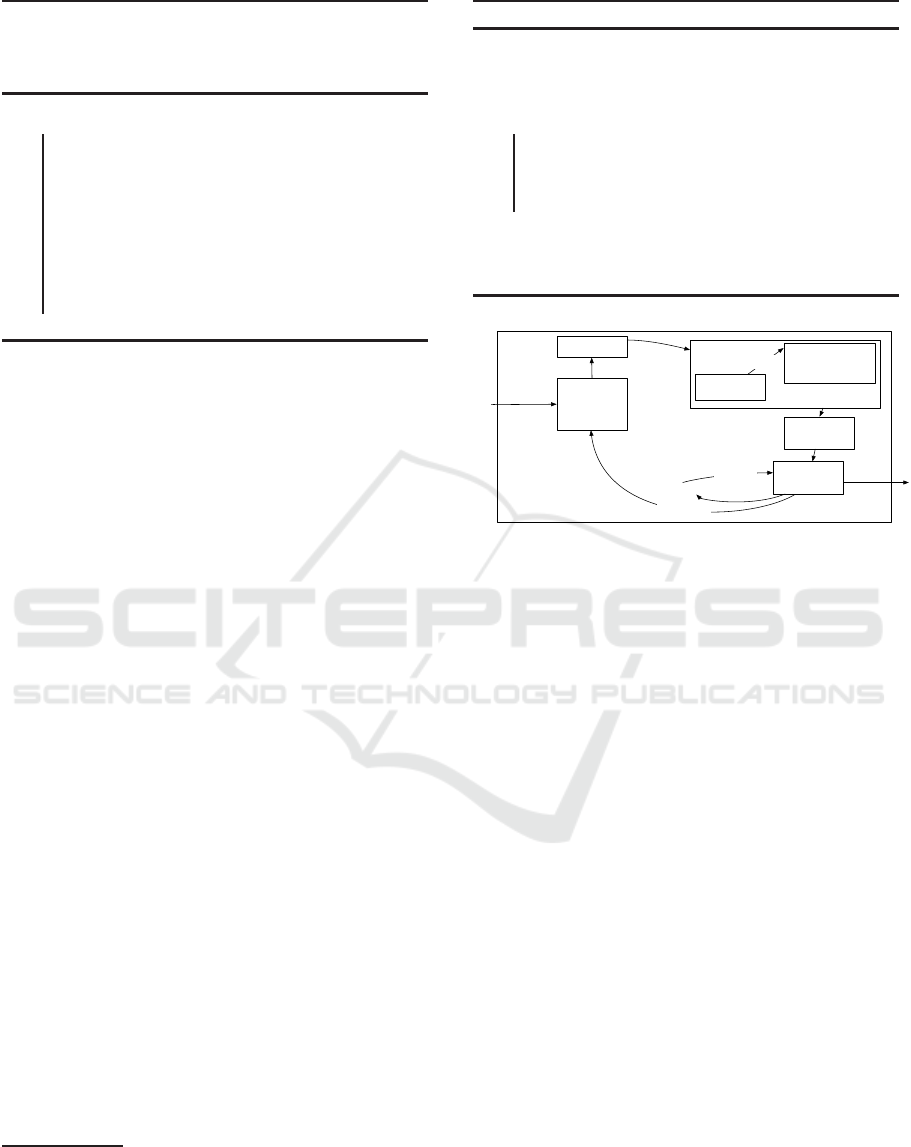
In Figure 1 we depict our N-BDI* architecture. The
deliberation cycle of the N-BDI* agent model is pre-
sented in Algorithm 1.In our terminology, beliefs
A Normative Agent-based Model for Sharing Data in Secure Trustworthy Digital Market Places
291
Algorithm 1: Modified control loop for the ex-
tended BDI agent (N-BDI*), where O= observation,
B= Belief set, G= Goal set, P= Plan set, and A
p
= Ac-
tions.
Given an agent {O, B, G, P, A
p
, Norms}
repeat
O := Observe(O+Norms);
B := Revise(B, O) ;
G := Generate G (B);
P := ∀g ∈ G → generate P(B, G);
P := CalculteU
P
∀ p ∈ P(B, G, P);
PrefP := U pdate P to PrefP(B, G, A
p
, P);
B := revise(B, Pref);
A
p
:= (norms(Power), Allowed?);
take (A
p
);
until forever;
encode the agent’s knowledge about the world or its
mental states, which the agent holds to be true (that
is, the agent will act upon them while they continue
to hold). Goals are equated with“desires” and com-
mitments to plans with “intentions”. We view inten-
tions as commitments to new beliefs or to carrying out
certain plans or pursuing new goals and actions in the
future. As stated above (Algorithm 1), the agent has
a set of plans (P), where each is primarily character-
ized by the goals (G) and a set of possible actions(A
p
).
In other words, each plan consists of an invocation
which is the event that the plan responds to and may
contribute to the G.
The N-BDI* agent belief set (B) contains the norms
and observations. Agent sets up the agent’s G based
on these two factors. The N-BDI* agent after produc-
ing the set of plan and select the best plan based on
the utility, for each plan will calculate a risk of vi-
olation and cost corresponding to the selected plan
(see Algorithm 2). The selected plan becomes the
current intention of the agent. Before selecting the
appropriate plan, the agent calculates the Risk of vi-
olation and cost for each plan, and remove the plans
that have the high association risk or cost from the
plan sets
2
. Then, inspecting A
p
to find all the action
recipes which have among their effects a goal in G.
Then, the agent will examine a power of itself to ex-
ecute the A
p
. As we mentioned earlier, our goal
to use N-BDI* framework to model and simulate the
effect of different norms on STDMPs. Our architec-
ture contains three phases: recognition, adoption and
compliance. In the first recognition part, the beliefs of
an agent revise and develop. This step equals to the
2
In some cases, the agent selects the plan which has a
low violation risk value and calculates the violation penalty
as well but in this paper we only consider that the agent
eliminates the violating plans from the plan sets before se-
lecting the appropriate plan
Algorithm 2: Select Plan.
input : (sub)Goal, Set of plans (p ∈ P), the Probability of each
plan, Value, Norms
output: Selected P, Plan that has the best utility.
SelectedPlan(P) := null;
for p ∈ P do
CalculateRiskViolation(p) = Value×Pr(p);
CalculateCost(p);
U(p) := Pr(p) ×U(s);
PU(P) := seto fPU(p);
end
PrefP := argmaxPU(P);
SelectedPlan(P) := PrefP;
return SelectedPlan(P)
Planner
Beliefset
Inc. norm—>
Rules
Duty-claimRight
(I) Power-liability
Observation
Plan
Intent
Condition —> Act —> Situation
Utility Planner
Inc. Risk, Sanction,
Reward, Cost,
Benefits
conflict?
Goal
update beliefset
Action
Act is
allowed?
Act?
Am I have an
Ability?
Figure 1: N-BDI* architecture.
RC in nBDI. During the adoption ( equals to the NC
in nBDI architecture), the agent commences actions.
The norm violation can happen during the adoption
phase (Luck et al., 2013). The compliance phase is
used to simulate the situation when the agent really
starts executing the action. We add another part to the
normative phase in our architecture that called mon-
itoring. In monitoring phase, the agent will reason
about the action and consequence of the actions on
the society.
3 SECURE TRUSTWORTHY
DIGITAL MARKETPLACES
(STDMPS)
Secure Trustworthy Digital Marketplaces (STDMPs)
a concept developed for data sharing in an open
world, while protecting the interests of the subjects
whose data is exchanged, the controllers of their data
and the rights of the subjects who created the data
transformations and the subjects that have an inter-
est in applying those transformations to that data. To
reduce the complexity of case study, we only consider
three types of STDMP agents:
Agents:
• LH: license holding agents who hold data and can
provide data to the market (the STDMPs);
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
292
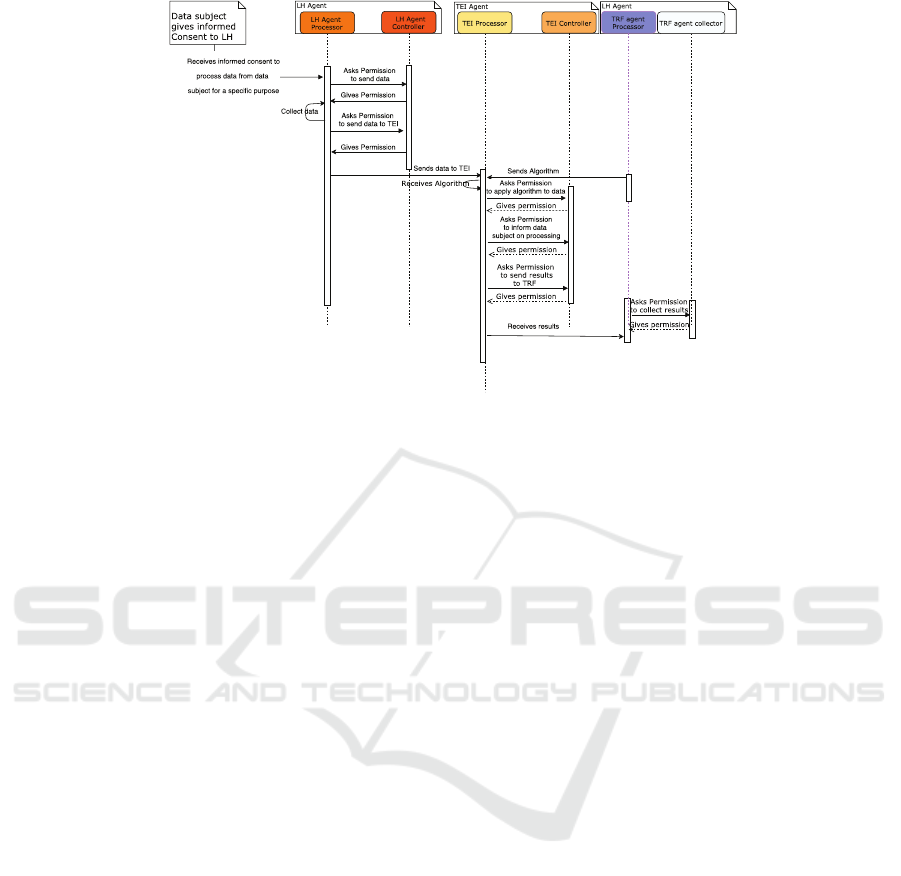
Figure 2: Message sequences diagram among STDMP’s agent.
• TEI agents who monitor the members’ behavior;
• TRF: Transformation agents who hold the algo-
rithms, have a need for the LH’s data that can be
provide through the STDMPs.
The STDMPs society is a regulated environment
which includes the expression and use of regulations
of different sorts: from actual laws and regulations is-
sued by governments,to policies and local regulations
issued by managers, and to social norms that prevail
in a given community of users.
3.1 Scenario
As we mentioned before, STDMP consists of three
main agents (LH, TEI, TRF). Each of these agents can
take the role of processor and controller. These are
two of the roles distinguished by the GDPR; the data
subject, the controller and the processor. Following
our architectural principle that one actor role comes
with its own belief set and plan operators, we have
components for each individual role. The processor
component is responsible for processing data on be-
half of the controller, which includes making data
available, while the controller component is respon-
sible to check requests for data against the GDPR and
the informed consent given by the data subjects. A
secure and trustworthy data-sharing platform among
hospitals, third parties and data analyst looking for
the most effective interventions based on patient data
is one good example of where STDMP protecting the
interests of the stakeholders and preventing data pro-
tection infringements can contribute.
In order to explain how STDMPs help to im-
plement GDPR and other requirements derived from
norms, we present a simplified scenario. The LH’s
agent in its role as controller receives informed con-
sent for processing personal data from a data sub-
ject for a specific (set of) purpose(s). The LH’s in
his processor role asks permission from its controller
to collect data and send it to the TEI. After giving
the permission, the LH’s processor collects and sends
data to the TEI. The TEI agent asks the TRF agent to
send its algorithm to the TEI agent to analyze data.
Be aware that since these data transformation func-
tions, e.g. data-mining algorithms, may be the pro-
tected norms e.g. copy right law, the algorithms do
not contain personal data and therefore are not sub-
jected to the GDPR, although in other cases we may
have to apply norms regulating access as well. The
TRF agent sends the algorithm after getting the per-
mission from its controller. The TEI agent combines
the data with the algorithm and sends the result to the
TRF. The details of this scenario are visualized in a
UML sequence diagram, see Figure 2.
In the scenario, depicted data processing requires pro-
tection of the interests of the stakeholders involved
and compliance to the GDPR. Because the liabilities
that may follow from not meeting the demands from
each of the parties involved, such data processing in-
frastructure will depend on trust between parties. The
TEI acts, as its name suggests as a trusted third party.
The behavior of this agent should be completely de-
terminant and transparent, and no human interference
is part of the actions of that agent. In the scenario pre-
sented, the purpose of using the requested data must
be fitted into the LH’s interest and the request must be
adhered to the GDPR rules.
A Normative Agent-based Model for Sharing Data in Secure Trustworthy Digital Market Places
293
TEI Agent:
Controller + Processor
LH Agent:
Controller + Processor
TRFAgent:
Processor+ Controller
Receive the transformation Request
(t
1
)
Check the purpose (p
p
∈ P)
t
1
∈ T
R(t
1
, p
p
)
Receive the
transformation
Request
(t
1
)
Process the Request
Access the Request
Make a
transformation
Request
(t
1
)
STDMPs
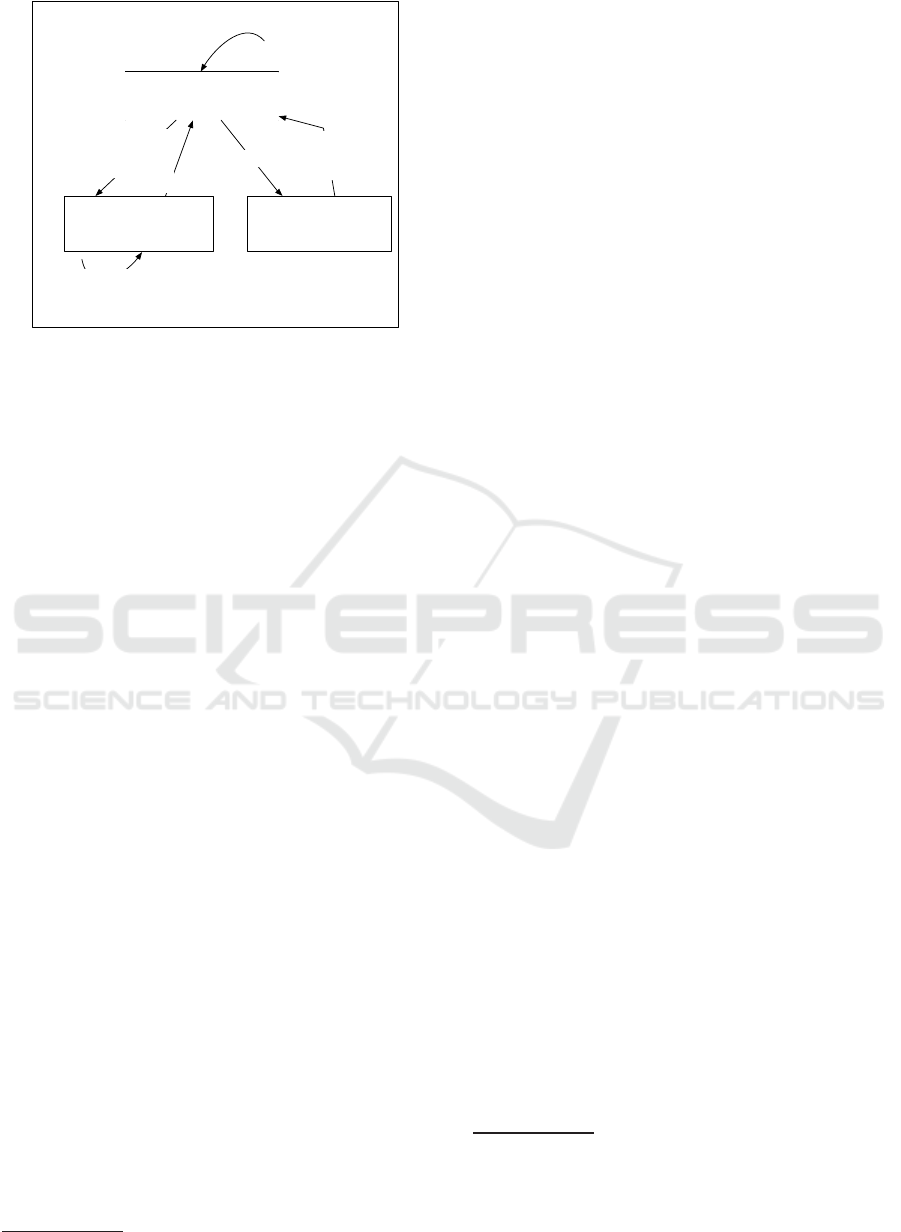
Figure 3: STDMPs Scenario.
We formalized the mentioned scenario as follow:
Context= (A
1
∈ LH, A
2
∈ TRF, Contract);
and,
Contract=Set of Permissions.
The TEI agent receives the A
1
’s transformation
request(t
1
) and check the eligibility of (t
1
) by check-
ing the condition of t
1
∈ T, where T denotes a set of
transformations. Note that, in the STDMP, the LH’s
controller defined the set of licenses for each data set.
Licenses have a defined a set of conditions on using
data. We visualize the scenario in Figure 3. In the
following, we present a norm definition to express the
contract among STDMPs’ members.
4 NORM
In this section, we present a recent general model of
norms (Oren et al., 2009) that distinguishes some gen-
eral normativeconcepts shared by some existing work
on norms and normativesystems (Farrell et al., 2005).
In (Oren et al., 2009), a norm n is modeled as a tuple:
Definition 1 (norm). A norm is defined as a tuple
n = (role, normtype, conditions, action)
such that:
• role: indicates the organizational position;
• norm type is one of the four modal verbs “can”
(which we formalize as a power), “can not” (dis-
ability), “must” (duty) and “must not” (which is
not the same as a no-right, but the obligation to not
do something!); In this paper, we define the con-
tract as a set of permissions that when acted upon
may result in other normative relations, including
duties. Permissions are equal to the Hohfeldian
concept power.
• condition
3
: describes when and where the norm
3
Pre-condition and Post-condition have been extracted
holds (norm adoption);
• action:action specifies the particular action to
which the normative relation is assigned (norm
adoption);
Example: Consider the norm, NormCollectData that
describes the permission to collect personal data
from the data subject, where the collector is the LH
agent consisting of two sub-agents (LH’s controller,
LH’s processor).
1. [Role: LH’s controller][Normative relation:
Power][condition: “iff ” legitimate purpose of
collecting data is specified explicit “AND” the
LH’s controller has provided the data subject with
the information on the processing of his personal
data’
4
] [action: collecting data].
2. [Role: LH’s processor][Normative relation:
Power] [condition: iff “processing of data is
compatible with the purposes for which data
was collected’ AND ’controller took appropriate
measures to provide information relating to
processing to the data subject’ AND ’ the LH’s
controller has provided the data subject with the
information on the processing of his personal
data”][action: process data].
5 PRELIMINARY
IMPLEMENTATION
To implement the STDMP we used the Java
Agent Development Framework based on BDI
(Jadex) (Pokahr et al., 2005) platform. The Jadex,
is an object-oriented software framework for the
creation of goal-oriented agents following the BDI
model. The Jadex reasoning engine tries to overcome
traditional limitations of the BDI agents by introduc-
ing an explicit representation of goals and a system-
atic way for the integration of goal deliberation mech-
anisms. The Jadex agent framework is built on the
top of the JADE platform and provides an execution
environment and an application programming inter-
face (API) to develop the BDI agents. In this pa-
per, we propose to implement the STDMPs system
using Jadex. As example of synthesis, we are now
from the GDPR.
4
Providing information to the data subject can be done
before the collection of data (then it is part of the pre-
condition, and the providing of information was part of
a different action), or during the action of collecting data
(then the result is part of the post-condition)
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
294

able to implement the N-BDI* model illustrated in
Algorithm 1. This is an excerpt of the code of the
LH’s controller agent where the agent checks the re-
quest and gives a permission (presented in the below
code 5).
Code: A part of the LH’s plan after receiving the order to
process data
@Plan(trigger=@Trigger(goals=ExecuteTask.class))
....
if(order!=null)
{
double time_span = order.getDeadline().getTime() -
order.getStartTime();
double elapsed_time = getTime() - order.getStartTime();
String start = order.getCheckRequest();
//will check
the request against GDPR
if(start == "allowed")
{
// Save successful transaction data.
order.setState(Order.DONE);
order.setExecutionNorm(norm);
order.setExecutionData(data);
order.setExecutionDate(
new Date(getTime()));
String report =
"Applied for: "+ Data;
NegotiationReport nr =
new NegotiationReport(order,
report, getTime());
reports.add(nr);
}
6 RELATED WORK
Various normative architectures have been presented
by researchers for different purposes. One of the pi-
oneering architectures in the area of normative multi-
agent systems was the deliberative normative agents’
architecture (Castelfranchi et al., 1999). According to
this architecture, violating norms can be considered
as acceptable as following them. Agents deliberate
about the norms that are explicitly implemented in the
model. Panagiotidi et. al presented a norm-oriented
agent (Panagiotidi et al., 2012); this agent takes into
consideration operationalized norms during the plan
generation phase, using as guidelines for the agent’s
future action path. Boella and van der Torre (Boella
and van der Torre, 2003) introduced a defender and
controller agent in their normative multi-agent sys-
tem. In their models, defenders agents should behave
based on the current norms. Controllers monitor the
behaviors of other agents and sanction violators, who
can also change norms as needed. Garcia et al.(Criado
et al., 2010) proposed a method to specify and explic-
itly manage the normative positions of agents (per-
missions, prohibitions and obligations), with which
distinct deontic notions and their relationships can be
captured. Another architecture that uses logical rep-
resentation is presented by Sadri et al. (Sadri et al.,
2006). The logical model of agency known as the
KGP model was extended in this work, to support
agents with normative concepts, based on the roles an
agent plays and the obligations and prohibitions that
result from playing these roles.
The EMIL (Lotzmann et al., 2013)architecture is
one of the most elaborate normative architectures de-
scribed in the literature. This architecture defines two
sets of components for each agent:
1. Epistemic, which is responsible for recognizing
norms;
2. Pragmatic, which is responsible for guaranteeing
that the institution creates some (usually norma-
tive) agent’s behavior.
) Applying the EMIL architecture in real scenarios
can be challenging due to the elaborate design of
its’ cognitive mechanisms. Many existing norma-
tive architectures are based on the BDI (belief, de-
sire and intention) structure. BOID (Belief Obliga-
tion Intention Desire) architecture extends the clas-
sic BDI agent’s architecture to include the notion of
obligation. Burgemeestre et al. (Burgemeestre et al.,
2010)propose a combined approach to identify objec-
tives for an architecture for self-regulating agents.
7 CONCLUSION
The regulation of multi-agent systems in environ-
ments with no control mechanisms, is gaining much
attention in the research community. Normative
multi-agent systems address this issue by introducing
incentives to cooperate (or discouraging deviation).
In our case, we used Calculamus, a knowledge rep-
resentation formalism based on Hohfeld’s normative
relations, to express the norms that govern real-world
data-sharing actions, essential for contract monitoring
purposes. .
The STDMPs society is a regulated environment
which includes the expression and use of regulations
of different sorts: from actual laws and regulations
issued by governments, to policies and local regula-
tions issued by managers, and to social norms that
prevail in a given community of users. For these
reasons, we consider the secure data sharing prob-
lem is a representative example of a societal problem
where norms impact the autonomous agents involved.
Hence our case study, which we also used for evalu-
ating the performance of the N-BDI* agent architec-
ture. The agents’ behavior in our STDMP model are
affected by different sorts of norms which are con-
trolled by different mechanisms such as regimenta-
tion, enforcement and grievance and arbitration pro-
cesses. We identify the main goals of the TEI agent
as being twofold. First, it aims at supporting agent
interaction as a coordination framework, making the
A Normative Agent-based Model for Sharing Data in Secure Trustworthy Digital Market Places
295

establishment of business agreements more efficient.
Furthermore, it serves the purpose of providing a level
of trust by offering an enforceable normative envi-
ronment. Our research is focused on modeling nor-
mative reasoning in a completely distributed environ-
ment. In particular, we are interested in how norms af-
fect the STDMPs,, which monitoring activities enable
detection of (non-)compliance in networked societies
of agents, and what enforcement activities would en-
hance compliance.
In order to support this, we are working on the imple-
mentation of a prototype of the N-BDI* architecture.
Our aim is to empirically evaluate our proposed so-
lution through the design and implementation of sce-
narios belonging to the STDMPs case study. In fu-
ture work, we will describe some experiments con-
cerning the flexibility and performance of the N-BDI*
agent model compared to simple BDI agents, using
the STDMPs case study.
ACKNOWLEDGEMENTS
This work is funded by the Dutch Science
Foundation project SARNET (grant no: CYB-
SEC.14.003/618.001.016). Special thanks go to our
research partner KLM. The authors would also like to
thank anonymous reviewers for their comments.
REFERENCES
Bicchieri, C. (2005). The grammar of society: The nature
and dynamics of social norms. Cambridge University
Press.
Boella, G. and van der Torre, L. (2003). Norm governed
multiagent systems: The delegation of control to au-
tonomous agents. In Intelligent Agent Technology,
2003. IAT 2003. IEEE/WIC International Conference
on, pages 329–335. IEEE.
Burgemeestre, B., Hulstijn, J., and Tan, Y.-H. (2010). To-
wards an architecture for self-regulating agents: a case
study in international trade. Lecture Notes in Com-
puter Science, 6069:320–333.
Castelfranchi, C., Dignum, F., Jonker, C. M., and Treur, J.
(1999). Deliberative normative agents: Principles and
architecture. In International Workshop on Agent The-
ories, Architectures, and Languages, pages 364–378.
Springer.
Criado, N., Argente, E., and Botti, V. (2010). A bdi archi-
tecture for normative decision making. In Proceedings
of the 9th International Conference on Autonomous
Agents and Multiagent Systems: volume 1-Volume 1,
pages 1383–1384. International Foundation for Au-
tonomous Agents and Multiagent Systems.
Deljoo, A., Gommans, L., van Engers, T., and de Laat, C.
(2016). An agent-based framework for multi-domain
service networks: Eduroam case study. In The 8th
International Conference on Agents and Artificial In-
telligence (ICAART’16), pages 275–280.
Deljoo, A., Gommans, L., van Engers, T., and de Laat,
C. (2017). What is going on: Utility-based plan
selection in bdi agents. In The AAAI-17 Workshop
on Knowledge-Based Techniques for Problem Solving
and Reasoning WS-17-12.
Dignum, F. (1999). Autonomous agents with norms. Artifi-
cial Intelligence and Law, 7(1):69–79.
Dignum, V. and Dignum, F. (2002). Towards an agent-
based infrastructure to support virtual organisations.
In Collaborative business ecosystems and virtual en-
terprises, pages 363–370. Springer.
Doesburg, R. v. and Engers, T. v. (2016). Perspectives on the
formal representation of the interpretation of norms.
In Legal Knowledge and Information Systems: JURIX
2016: The Twenty-Ninth Annual Conference, volume
294, page 183. IOS Press.
Farrell, A. D., Sergot, M. J., Sall´e, M., and Bartolini, C.
(2005). Using the event calculus for tracking the nor-
mative state of contracts. International Journal of Co-
operative Information Systems, 14(02n03):99–129.
Gouaich, A. (2003). Requirements for achieving software
agents autonomy and defining their responsibility. In
International Workshop on Computational Autonomy,
pages 128–139. Springer.
Lotzmann, U., M¨ohring, M., and Troitzsch, K. G. (2013).
Simulating the emergence of norms in different sce-
narios. Artificial intelligence and law, 21(1):109–138.
Luck, M., Mahmoud, S., Meneguzzi, F., Kollingbaum,
M., Norman, T. J., Criado, N., and Fagundes, M. S.
(2013). Normative Agents, pages 209–220. Springer
Netherlands, Dordrecht.
Oren, N., Panagiotidi, S., V´azquez-Salceda, J., Modgil, S.,
Luck, M., and Miles, S. (2009). Towards a formalisa-
tion of electronic contracting environments. In Co-
ordination, organizations, institutions and norms in
agent systems IV, pages 156–171. Springer.
Panagiotidi, S., V´azquez-Salceda, J., and Dignum, F.
(2012). Reasoning over norm compliance via plan-
ning. In International Workshop on Coordination, Or-
ganizations, Institutions, and Norms in Agent Systems,
pages 35–52. Springer.
Pokahr, A., Braubach, L., and Lamersdorf, W. (2005).
Jadex: A bdi reasoning engine. Multi-agent program-
ming, pages 149–174.
Sadri, F., Stathis, K., and Toni, F. (2006). Normative kgp
agents. Computational & Mathematical Organization
Theory, 12(2-3):101.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
296
