
Approximate Algorithms for Double Combinatorial Auctions for
Resource Allocation in Clouds: An Empirical Comparison
Diana Gudu
1
, Gabriel Zachmann
1,2
, Marcus Hardt
1
and Achim Streit
1
1
Karlsruhe Institute of Technology, Karlsruhe, Germany
2
Baden-Wuerttemberg Cooperative State University, Karlsruhe, Germany
Keywords:
Combinatorial Auction, Resource Allocation, Cloud Computing, Approximate Algorithm.
Abstract:
There is an increasing trend towards market-driven resource allocation in cloud computing, which can address
customer requirements for flexibility, fine-grained allocation, as well as improve provider revenues. We for-
mulate the cloud resource allocation as a double combinatorial auction. However, combinatorial auctions are
NP-hard problems. Determining the allocation optimally is thus intractable in most cases. Various heuristics
have been proposed, but their performance and quality of the obtained solutions are highly dependent on the
input. In this paper, we perform an extensive empirical comparison of several approximate allocation algo-
rithms for double combinatorial auctions. We discuss their performance, economic efficiency, and the reasons
behind the observed variations in approximation quality. Finally, we show that there is no clear winner: no
algorithm outperforms the others in all test scenarios. Furthermore, we introduce a novel artificial input gen-
erator for combinatorial auctions which uses parameterized random distributions for bundle sizes, resource
type selection inside a bundle, and the bid values and reserve prices. We showcase its flexibility, required for
thorough benchmark design, through a wide range of test cases.
1 INTRODUCTION
The pay-per-use, on-demand models promoted by
cloud computing (Rappa, 2004) have enabled its ubiq-
uity in today’s technological landscape. From large
businesses moving their services to the cloud, to de-
velopers running small tests for their applications, the
requirements are becoming increasingly diverse. This
diversity is challenging for both cloud providers seek-
ing to improve their profits, as well as customers try-
ing to find a cost-effective option that aligns with their
requirements. The advent of open-source cloud tech-
nologies (CloudStack, 2017; Openstack, 2017), cou-
pled with a wide availability of low-cost server hard-
ware, has also led to an increase in cloud providers
entering the market to meet the ever-growing user de-
mands. This increases the burden on customers to
make an informed decision when choosing and com-
bining cloud resources from multiple providers.
Current trends (Buyya et al., 2008) point towards
market-driven resource allocation and pricing for a
fine-grained, customizable experience for cloud cus-
tomers. Some commercial cloud providers have al-
ready adopted the concept of dynamic pricing in or-
der to maximize their resource utilization and increase
their revenue: Amazon is selling unused resources
on the so-called spot market (Amazon, 2017), where
price is regulated by the fluctuating demand and sup-
ply. There is still, however, more research required
to move from existing market mechanisms which are
fast, simple, but inflexible (such as single-good, one-
sided auctions), towards more complex, but flexible
and economically efficient mechanisms.
The use of two-sided combinatorial auctions for
cloud resource provisioning is a research topic that
has been gaining interest (Nejad et al., 2015; Samimi
et al., 2014). The combinatorial aspect ensures flex-
ibility in resource provisioning—clients can request
exactly the amount of resources they need without
being limited to a few predefined bundles offered by
providers, such as the Amazon EC2 virtual machine
instance types (Amazon, 2017). The two-sided aspect
brings more fairness by considering both clients and
providers when making allocation decisions, and of-
floading the decision to a central entity (the auction-
eer) instead of each cloud provider.
The main reason why combinatorial auctions are
not yet widely used in practice is their computa-
tional complexity: combinatorial auctions are N P -
hard problems (De Vries and Vohra, 2003). Finding
58
Gudu, D., Zachmann, G., Hardt, M. and Streit, A.
Approximate Algorithms for Double Combinatorial Auctions for Resource Allocation in Clouds: An Empirical Comparison.
DOI: 10.5220/0006593900580069
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 1, pages 58-69
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

an optimal solution is intractable for large problems.
Fast, approximate algorithms exist, but they incur a
certain loss in efficiency that needs to be bounded.
Due to the assumed scale of cloud allocation as pre-
sented above, fast allocation needs to be prioritized
over optimal solutions. Nevertheless, any improve-
ment in solution quality can translate into large sav-
ings for clients and increases in provider revenue.
Although there is a plethora of approximate algo-
rithms for combinatorial auctions in the literature (Fu-
jishima et al., 1999; Nejad et al., 2015; Lehmann
et al., 2002; Holte, 2001; Zurel and Nisan, 2001;
Hoos and Boutilier, 2000; Chu and Beasley, 1998;
Khuri et al., 1994), to our knowledge there is no
comprehensive comparison using a consistent prob-
lem formulation and benchmarks.
With this paper, we aim to lay the groundwork for
a unified, consistent evaluation of heuristic algorithms
for combinatorial auctions. We create a portfolio of
algorithms based on existing work or well-known op-
timization methods, but adapted and improved for our
proposed problem formulation. We then introduce a
flexible tool for generating artificial datasets for com-
binatorial auctions, which can be the basis for thor-
ough benchmarking of combinatorial auctions. We
perform an extensive empirical comparison of the al-
gorithms in the portfolio and discuss the differences
in performance and approximation quality.
2 PROBLEM FORMULATION
A multi-good, multi-unit two-sided combinatorial
auction is given by (Nisan et al., 2007b; Gudu et al.,
2016): a set U of n buyers or users (U = {1,..., n}), a
set P of m sellers or providers (P = {1, ... ,m}), each
offering different quantities of resources G of l types
(G = {1, ... ,l}), and an auctioneer that receives bids
and asks, and decides upon the allocation and pricing
of resources.
Each buyer i ∈ U submits a bid for a bun-
dle of resources to the auctioneer, expressed as
(hr
i1
,. .., r
il
i,b
i
), where b
i
is the value the buyer is
willing to pay for the bundle, and r
ik
is the integer
amount of requested resources of type k. Each seller
j ∈ P submits its ask to the auctioneer, expressed
as (hs
j1
,. .., s
jl
i,ha
j1
,. .., a
jl
i). That is, for each re-
source type k ∈ G, each seller offers a certain integer
quantity s
jk
at a reserve price a
jk
(the minimum price
for which it is willing to sell one item of the resource).
We assume that a buyer can receive the resources in a
single bundle from multiple sellers.
For example, a seller like Amazon EC2 might pro-
vide 3 types of virtual machines (t2.small, t2.medium
and t2.large) at the current on-demand prices (Ama-
zon, 2017) for the EU (London) region: 0.026$,
0.052$ and 0.106$ (per hour). If a seller provides 100
instances of each type, then its ask will be expressed
as (h100, 100,100i,h0.026, 0.052,0.104i). We can
also use our problem formulation to model finer-
grained allocation: the resources being sold are com-
puting cores, memory, storage space, etc, and the cus-
tomer can request exactly the amount of resources it
needs instead of being constrained by prepackaged
VMs. For example, a customer can request a VM with
40 cores, 64 GB of memory and 1 TB disk storage,
and is willing to pay at most 10$. Then it submits the
following bid: (h40,64, 1000i,10). In this case, how-
ever, all the resources in a customer’s bundle would
have to be allocated by the same provider.
After collecting all bids and asks, the auctioneer
must find the optimal allocation, which is defined as
the allocation that maximizes the social welfare, i.e.
the sum of all trade participants’ utilities.
A buyer i’s utility for a bundle S that it bids on is
defined as: u
i
(S) = v
i
(S) − p
i
, if i obtains bundle S,
and 0 otherwise. p
i
is the price the buyer pays at the
end of the trade, and v
i
is the buyer’s valuation, or the
real worth estimated by the buyer for the specific bun-
dle. If the buyer is truthful, then the bid b
i
it submits
to the auctioneer is equal to its valuation. Seller utility
can be defined in a similar way.
We assume that the buyers are single-minded:
they need all the goods in the bundle (their valuation
for any subset of the requested bundle is 0). Sellers,
on the other hand, are not single-minded: any subset
of the offered goods has a positive valuation. More-
over, the seller’s valuation function is additive, mean-
ing that the value of a bundle can be computed by
summing the values of the goods in that bundle.
Then the winner determination problem
(WDP) (Lehmann et al., 2006) can be written
as an integer program that maximizes social welfare:
max
x,w
n
∑
i=1
b
i
x
i
−
m
∑
j=1
l
∑
k=1
a
jk
n
∑
i=1
w
i jk
!
(1)
subject to:
x
i
∈ {0,1},∀i ∈U (2)
m
∑
j=1
w
i jk
= r
ik
x
i
,∀i ∈U,∀k ∈ G (3)
n
∑
i=1
w
i jk
≤ s
jk
,∀j ∈ P,∀k ∈G (4)
where x
i
and w
i jk
define the final allocation: x
i
in-
dicates whether bidder i receives the bundle it re-
quested, and w
i jk
indicates the total number of re-
sources of type k allocated by seller j to buyer i. Con-
Approximate Algorithms for Double Combinatorial Auctions for Resource Allocation in Clouds: An Empirical Comparison
59

straint (2) expresses the single-mindedness of buy-
ers. Constraint (3) ensures that the total amount of
resources of a certain type that all sellers allocate to a
certain buyer is the same as the amount of resources
of that type requested by the buyer. Finally, con-
straint (4) ensures that a seller cannot sell more than
the amount of resources it offered.
2.1 Payment Scheme
Along with the WDP, the payment scheme is an es-
sential part of mechanism design. Only through an
appropriate pricing can the desired economic prop-
erties of the allocation be ensured. The following
four properties are generally targeted, although they
cannot be simultaneously satisfied (Myerson and Sat-
terthwaite, 1983): incentive compatibility, individual
rationality, economic efficiency and budget-balance.
Vickrey-Clarke-Groves (VCG) (Nisan et al.,
2007a) is a class of mechanisms that are both truth-
ful and achieve a socially optimal solution, but are
not budget-balanced—the auctioneer has to subsidize
the trade. Moreover, VCG pricing is computationally
expensive: each winner pays its social cost, i.e. one
must solve an instance of the WDP for each trade win-
ner, to compute the social welfare for the case when
it does not participate in the auction. This is why we
did not use VCG in our work.
Instead, we relax the truthfulness constraint in fa-
vor of individual rationality and budget-balance. De-
pending on the algorithm used for WDP, economic
efficiency might not be achieved. However, most
heuristics are asymptotically economically efficient,
guaranteeing a near-optimal solution (within a fac-
tor of
√
l for the greedy algorithm (Lehmann et al.,
2002)). The κ-pricing scheme (Schnizler et al., 2008)
meets these requirements.
The general idea behind κ-pricing is to divide the
trade surplus among the trade participants in order to
ensure budget-balance. In the multi-good multi-unit
case, for a buyer i that is allocated resources from
multiple sellers, the surplus caused by the trade is:
δ
i
= b
i
−
m
∑
j=1
l
∑
k=1
a
jk
w
i jk
(5)
Bidder i will thus receive a discount of a κ-th part
of this surplus, resulting in payment p
i
= (b
i
−κδ
i
)x
i
.
The remaining (1 −κ)δ
i
is divided between all the
sellers participating in the exchange generating the
surplus, proportional to each seller’s share. A seller’s
share in the trade with bidder i can be calculated by:
β
i j
=
∑
l
k=1
a
jk
w
i jk
∑
m
j=1
∑
l
k=1
a
jk
w
i jk
(6)
Adding up the surplus from all the exchanges a
seller j is involved in, the final payment of seller j
can be calculated by:
p
j
=
n
∑
i=1
l
∑
k=1
a
jk
w
i jk
+ (1 −κ)δ
i
β
i j
!
(7)
We used κ = 0.5 for an equal distribution of surplus.
Although the κ-pricing scheme is not incentive
compatible, non-truthful bidding increases the risk of
no allocation (Schnizler et al., 2008). Therefore, in
most cases, the competition in the market motivates
the participants to reveal their true valuations. Thus
our mechanism is budget-balanced, individually ra-
tional, asymptotically economically efficient and, in
practice, truthful.
3 ALGORITHM PORTFOLIO
In the following subsections we present different al-
gorithms to solve the WDP. They are either based
on existing work or use widely known optimization
methods, but adapted to our problem formulation.
Except for branch-and-cut, the algorithms in the
portfolio aim to approximate the optimal solution in a
reasonable time rather than find the optimal solution.
This is done by improving the ordering of bids and
asks onto which greedy algorithms are finally applied.
3.1 Branch-and-cut
The WDP can be tackled as a mixed-integer linear
program (MILP) (Gonen and Lehmann, 2000). The
most used approach for solving MILPs is branch-and-
cut (Padberg and Rinaldi, 1991). In the worst case,
this approach has exponential complexity, but it al-
ways leads to an optimal solution.
We implemented WDP for our combinatorial auc-
tion problem using ILOG’s CPLEX (IBM, 2017) soft-
ware and named this algorithm MILP. CPLEX is the
most used and most performant software for integer
and linear programming problems. Even though it is
proprietary software, IBM offers academic licenses.
3.2 Greedy Algorithms
As the name suggests, greedy algorithms are heuris-
tics that make the locally optimal choice at every step,
aiming for a globally optimal solution (Cormen et al.,
2001). Greedy algorithms thus prioritize speed over
solution quality. There is a rich literature of greedy al-
gorithms for the WDP (Lehmann et al., 2002; Samimi
et al., 2014; Nejad et al., 2015; Pfeiffer and Rothlauf,
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
60

2008), and they all share a simple idea: the bids are
sorted according to a certain criterion and then bids
are greedily allocated as long as there are no conflicts.
In the rest of this section we present our greedy algo-
rithms, adapted to our problem formulation.
We use bid and ask densities as sorting criteria,
which are defined for buyer i and seller j in Eqn. 8.
d
i
=
b
i
√
M
i
, d
j
=
∑
l
k=1
a
jk
s
jk
p
M
j
(8)
Based on (Lehmann et al., 2002) and (Nejad et al.,
2015), we redefine M
i
and M
j
in Eqn. 9.
M
i
=
l
∑
k=1
f
b
k
r
ik
, M
j
=
l
∑
k=1
f
a
k
s
jk
(9)
f
k
represents the relative weight of resource type
k and it can be used to express differences in value
for the resource types. We propose using different
weights for bids and asks, f
b
k
and f
a
k
, respectively.
(Nejad et al., 2015) introduce three options for cal-
culating f
k
in one-sided auctions, which they name
relevance factors. The first option is a generaliza-
tion of the one-dimensional case of (Lehmann et al.,
2002), namely uniform weights. The other options
consider the scarcity of resources, either absolute
value (the inverse of the provider’s capacity of each
resource) or relative scarcity (the difference between
demand and supply, normalized by demand). We ex-
tend these options to the two-sided case as follows
(∀k ∈G):
1. f
b
k
= f
a
k
= 1
2. f
b
k
=
1
∑
m
j=1
s
jk
, f
a
k
=
1
∑
n
i=1
r
ik
3. f
b
k
=
∑
n
i=1
r
ik
−
∑
m
j=1
s
jk
∑
n
i=1
r
ik
, f
a
k
=
∑
n
i=1
r
ik
−
∑
m
j=1
s
jk
∑
m
j=1
s
jk
Densities are used to sort bids descendingly and
asks ascendingly, giving priority to clients with higher
bids and providers offering cheaper goods. For each
bid, the greedy algorithm then iterates through the
asks and allocates resources to the client until its
request is fully satisfied. When moving on to the
next bid in the list, previous asks are not consid-
ered in order to preserve monotonicity (Lehmann
et al., 2002)—a necessary (but not sufficient) condi-
tion for a truthful mechanism. The algorithm stops
when it reaches the end of either the bid list (all re-
quests can be satisfied) or the ask list (there are no
more providers that can satisfy the requests), based
on (Samimi et al., 2014). We call this algorithm
Greedy-I. The main problem of Greedy-I is that it
is not individually rational. That is, some partici-
pants might have negative utility by joining the auc-
tion, since the algorithm traverses the full lists of bids
and asks; the stopping criterion does not take into ac-
count the bid and ask values, which might result in
negative utility.
In Greedy-II, we propose stopping the algorithm
when the surplus caused by satisfying the bid cur-
rently considered (as defined in Eqn. 5) becomes neg-
ative. We call this bid and the first unallocated ask
critical. A critical value is defined as the value below
which a bid would not be allocated (Lehmann et al.,
2002). Although this might result in less goods be-
ing traded, the social welfare will be higher since we
are mostly eliminating trades that will result in nega-
tive utility. We use the three options of calculating the
relevance factors and name these variations Greedy-II
fk1, Greedy-II fk2 and Greedy-II fk3.
Greedy-I performs much worse for sparse
providers (offering only a subset of the resource
types), yielding a social welfare at least two or-
ders of magnitude smaller than the dense providers
case (Gudu et al., 2016). The reason for this is that,
while trying to preserve monotonicity, the algorithm
skips providers that cannot satisfy the request of the
currently considered bidder, and a large quantity of
resources remain unallocated. In Greedy-III, we pro-
pose to fix this issue by considering partially allo-
cated, previously considered (i.e. lower density) asks
for each buyer request, therefore returning to the be-
ginning of the ask list for each bid. This increases the
complexity of the algorithm and violates the mono-
tonicity property, but leads to a higher social welfare.
Another consequence is that the goods allocated to
one bidder will be less likely to come from the same
provider (or a small number). Although this resource
locality is not an explicit constraint in our problem
definition, it might be a soft constraint in some cases.
Overlooking resource locality and monotonicity
led to an improved algorithm, Greedy-IV, which still
sorts the bids by density, but keeps an index of sorted
asks for each resource type, sorting them by the ask-
ing price of the respective resource type (a total of l
lists). The bids are then greedily allocated: the bid-
der with the highest density receives the cheapest re-
sources over all providers. Greedy-IV has a higher
time and memory complexity, but can also result in
higher welfare than the other algorithms.
3.3 Relaxed Linear Program-based
Relaxing the integrality constraints of the decision
variables x
i
and quantities w
i jk
transforms the inte-
ger program in Eqn. 1 into a linear program that can
be solved faster (weakly polynomial time when using
interior point methods, or exponential time for sim-
plex methods (Luenberger and Ye, 2015)) and that
Approximate Algorithms for Double Combinatorial Auctions for Resource Allocation in Clouds: An Empirical Comparison
61

provides an upper bound for social welfare. We im-
plemented two algorithms based on the relaxed linear
problem, based on (Pfeiffer and Rothlauf, 2008).
The first one is called Relaxed LP Solution
(RLPS) and it applies Greedy-II on a set of bids and
asks sorted descendingly by their continuous decision
variables, which in our case are x
0
i
and
∑
n
i=1
∑
l
k=1
w
0
i jk
∑
l
k=1
s
jk
for
bids and asks, respectively. By x
0
i
and w
0
i jk
we denote
the solutions of the relaxed linear program.
The second algorithm, Shadow Surplus (SS), uses
the solution of the dual linear program (w
00
i jk
) to com-
pute shadow surpluses for bids and asks as in Eqn. 10.
Shadow surpluses are then used to sort bids de-
scendingly and asks ascendingly, and then applying
Greedy-II to compute the allocation.
SS
i
=
b
i
∑
l
k=1
∑
m
j=1
w
00
i jk
r
ik
,SS
j
=
∑
l
k=1
a
jk
s
jk
∑
l
k=1
∑
n
i=1
w
00
i jk
s
jk
(10)
Both algorithms use CPLEX to compute the solu-
tion of the relaxed linear problem.
3.4 Hill Climbing
Hill climbing algorithms (Russell and Norvig, 2010;
Holte, 2001) typically perform a local search in the
solution space by starting off at a random point and
moving to a neighboring solution if the cost function
of the neighbor is higher. The algorithm stops when
it finds a (local) maximum. We define a solution in
the search space as an ordering of bids (and asks)
onto which a greedy algorithm can be applied, and
the cost of a solution as its social welfare. We gen-
erate the random initial solution using a greedy algo-
rithm. Based on (Zurel and Nisan, 2001), we came up
with several ideas for generating a neighboring solu-
tion, which resulted in four algorithms.
In Hill-I, a neighboring solution is generated by
moving an unallocated bid or ask to the beginning
of the bid/ask list as proposed by (Zurel and Nisan,
2001), starting with the critical bid/ask and then go-
ing through the sorted lists. Greedy-II is used for al-
location. In Hill-II, the unallocated bid/ask replaces
the last allocated bid/ask instead. Greedy-II is used
in this case as well. Hill-III uses Greedy-IV for allo-
cation. This means that only the ordering of bids is
part of the search space. Hill-III is similar to Hill-I by
moving the bid to the top of the bid list. Hill-IV also
uses Greedy-IV for allocation and moves the unallo-
cated bid at the end of the list of allocated bids, before
the last allocated bid.
3.5 Simulated Annealing
Simulated annealing (Kirkpatrick et al., 1983) is a
well-known optimization algorithm that accepts (with
some probability) worse solutions, in order to climb
out of local optima and reach a global optimum. The
acceptance probability depends on a temperature vari-
able which decreases over time, allowing the algo-
rithm to accept worse solutions with a higher prob-
ability in the beginning of the search, but to gradually
converge as the temperature decreases.
We propose a simulated annealing algorithm with
the following features: the initial solution is generated
using Greedy-II; generating a neighboring solution is
done by choosing a random x
i
, toggling it, and then
finding a feasible solution using Greedy-II-like allo-
cation; the temperature decreases with a constant rate
of α = 0.9; the acceptance probability is computed us-
ing the formula ap = e
(w
new
−w
old
)/(T
|
w
old
|
)
, where w
old
and w
new
are the welfare values before and after mov-
ing to the neighboring solution. For each tempera-
ture, a constant number of iterations is executed; we
named this algorithm SA-I. We derived a second al-
gorithm SA-II by having a linear number of iterations
for each temperature, proportional to the number of
bids (n/20). Then in SA-III we use Greedy-IV for
generating the initial solutions, as well as for comput-
ing the feasible allocations at every step.
3.6 Casanova
(Hoos and Boutilier, 2000) propose a stochastic lo-
cal search algorithm named Casanova which, similar
to SA, uses randomization to escape from local op-
tima. The algorithm starts with an empty allocation
and adds bids to reach a neighbor in the search space:
with a walk probability wp, a random bid is chosen
for allocation (we use a Greedy-IV-like algorithm to
select the asks to satisfy the chosen bid); with a prob-
ability of 1−wp, a bid is selected greedily by ranking
the bids according to their score. The score is de-
fined as the normalized bid price (b
i
/
∑
l
k=1
r
ik
). From
the sorted bids, the highest-ranked one is selected if
its novelty is lower than that of the second highest
ranked bid; otherwise, we select the highest ranked
bid with a novelty probability np and the second high-
est one with a probability of 1 −np. We introduced
the novelty of bids as a counterpart of the age defined
by (Hoos and Boutilier, 2000), as a measure of how
often the bid was selected instead of the number of
steps since it was last selected. The search is restarted
maxTries = 10 times and the best solution from all
runs is chosen. As (Hoos and Boutilier, 2000), we set
wp = 0.15 and np = 0.5.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
62

3.7 Genetic Algorithms
The multi-unit multi-good combinatorial problem can
be reduced to the multidimensional knapsack prob-
lem (Holte, 2001), which is an N P -complete prob-
lem (Kellerer et al., 2004). There are several genetic
algorithms for solving the multidimensional knapsack
problem (Chu and Beasley, 1998; Khuri et al., 1994).
We propose a genetic algorithm where individu-
als are given by the ordering of bids and asks over
which a greedy algorithm can be applied. This is dif-
ferent from other algorithms in the literature where in-
dividuals are given by the solution vectors, since our
w representation would have increased the gene space
considerably, as well as added complexity to ensure
the feasibility of each solution. Next, we describe
our steady-state (Whitley and Starkweather, 1990) ap-
proach, where offsprings replace the least fit individ-
uals. The fitness function is defined as the welfare of
an individual. We randomly generate an initial pop-
ulation of N = 100 individuals. Two parents are se-
lected using the tournament selection method (Gold-
berg and Deb, 1991), each from a random pool of size
T = 5. They produce a child through the crossover op-
eration: a binary random number generator chooses
which parent will give the child’s next bid. Mutation
consists of swapping two random bids and two ran-
dom asks. We fix the mutation rate to M = 2. The
process of parent selection, crossover, mutation and
fitness evaluation is repeated t
max
= 1000 times. The
final solution is given by the fittest individual in the
population. We implemented two versions: GA-I uses
Greedy-II for allocation, while GA-II uses Greedy-IV.
3.8 Algorithm Properties
Table 1 summarizes the properties of each algorithm
in the portfolio. The proofs for time complexities are
omitted due to lack of space. However, we note that
most of the approximate algorithms run in polynomial
time, compensating with speed for the loss of welfare
compared to the optimal exponential algorithm.
The algorithms in several classes (simulated an-
nealing, stochastic local search and genetic algo-
rithms) are stochastic: they use randomization to ex-
plore the search space, which means that they can
compute different results when ran multiple times on
the same input.
Another property included in Table 1 is resource
locality. It expresses an algorithm’s preference to
allocate resources in a bidder’s bundle on the same
cloud provider. It should be noted that this is a soft
constraint: it is enforced only when possible and it
translates into bidders receiving resources from as
few providers as possible, while preserving the mono-
tonicity property. The algorithms that have this prop-
erty use a Greedy-II-like allocation after optimizing
the ordering of bids and asks.
4 INPUT GENERATION
Finding real-world data for auctions of cloud re-
sources is a difficult task, since commercial cloud
providers do not typically release user bidding infor-
mation. Existing cloud auctions for dynamic pricing
of resources, such as the Amazon spot instance mar-
ket (Amazon, 2017), are simplistic and mostly one-
sided single-good auctions. Although cloud prices are
publicly available, the amount of resources offered
and their relative scarcity are not, since providers
claim infinite resources. Several cloud providers have
released workload traces to be used for cloud schedul-
ing (Wilkes, 2011; Facebook, 2012). These can pro-
vide insights into typical jobs running in the cloud,
enabling us to extract the sizes of bundles requested
by clients, as well as different resource quantities and
their dependencies. However, resource types are gen-
erally limited to CPU load, memory, storage and pos-
sibly bandwidth, making the data too simple to thor-
oughly test combinatorial auctions.
Therefore, we use artificial data in all our evalua-
tions, as most papers dealing with combinatorial auc-
tions (Leyton-Brown et al., 2000; Sandholm, 2002;
De Vries and Vohra, 2003) do. An added benefit of
synthetic data generation is flexibility: a larger range
of use cases can be covered, rather than having just a
few real-world, but narrow-scoped datasets.
4.1 CAGE
Although there has been some work on artificial data
generation for combinatorial auctions (Leyton-Brown
et al., 2000; Sandholm, 2002; Fujishima et al., 1999;
De Vries and Vohra, 2003), to our knowledge there
is no work that deals with multi-good and multi-unit
combinatorial auctions. The Combinatorial Auctions
Test Suite (CATS) (Leyton-Brown et al., 2000) is ac-
tually the first work that tries to create a comprehen-
sive tool for generating artificial data for combinato-
rial auctions. It supports legacy distributions (covered
in older papers), but the authors also propose more re-
alistic distributions by modeling complementarity and
substitutability of goods using graphs. We do not deal
with dependencies between goods, but the existing
work is not sufficient to generate input data for our re-
source allocation problem with multi-unit multi-good
bids. We also consider the differences between buyers
Approximate Algorithms for Double Combinatorial Auctions for Resource Allocation in Clouds: An Empirical Comparison
63
Table 1: Summary of algorithm properties.
Class Algorithm Stochastic Resource Time complexity
locality
Branch-and-cut MILP exponential
Greedy
Greedy-I X O(nlog n + m logm + l(n + m))
Greedy-II X O(nlog n + m logm + l(n + m))
Greedy-III O(nml)
Greedy-IV O(nml)
Linear relaxation
SS X exponential
RLPS X exponential
Hill climbing
Hill-I X O(nml(n + m))
Hill-II X O(nml(n + m))
Hill-III O(n
2
ml)
Hill-IV O(n
2
ml)
Simulated annealing
SA-I X X O(nlogn + m log m + nl + it
logT
min
logα
ml)
SA-II X X O(
logT
min
logα
nml)
SA-III X O(
logT
min
logα
nml)
Genetic algorithms GA-I X X O((N + l)(n + m)(N + t
max
))
Stochastic local search Casanova X O(maxTries(nml + n
2
))
and sellers and hence require different strategies for
generating input for each side. Thus, we propose an
improved way of generating artificial data for multi-
good multi-unit double combinatorial auctions, com-
patible with legacy distributions (Leyton-Brown et al.,
2000). Our tool CAGE (Combinatorial Auctions in-
put GEnerator) is introduced in the following.
A problem instance (defined by the set of bids and
asks) can be generated using the following parame-
ters: the number of bids n, the number of asks m, the
number of resource types l and multiple random dis-
tributions with their parameters. We define the ran-
dom distributions to generate the bids as follows.
A bundle size is randomly drawn from a given
bundle size distribution, where the bundle size is the
total number of items of any type of resource.
Resource type selection: for each bundle, the re-
source type of an item is selected with a probability
given by a distribution over the number of resource
types (e.g. uniform or normal). A special case is the
sparse uniform distribution, where only a subset of
resources are requested by each bidder, with the size
of this subset given as input parameter; the resource
types in the subset can be different for each bidder.
The resource quantities of a bundle are then uniformly
distributed among the resource types in the subset.
A bid value proportional to the number of items
in each bundle is then generated; first, the base price
distribution is used to generate a base price for each
resource type, representing the known approximate
market value of each resource type. These base prices
are the same for all trade participants. The price dis-
tribution is then used to generate an average price per
unit for each resource type, around its base price; the
total bid value is then computed by combining these
prices per unit and the number of items requested
of each resource type in one of the following ways:
1) additive: the total bid value is computed as a lin-
ear combination of the unit prices per resource type,
weighed by the number of items requested for each
type; 2) super-additive: we compute the bid value as
a quadratic function (De Vries and Vohra, 2003) pro-
portional to the bid size and parameterized with an
additivity factor (Eqn 11).
b
i
=
l
∑
k=1
v
∗
ik
r
ik
+ additivity
∑
k6=h
v
∗
ik
r
ik
v
∗
ih
r
ih
(11)
In Eqn. 11, by v
∗
ik
we denote a bidder i’s reported
(not necessarily true) valuation for one item of re-
source type k.
The same strategy is used for generating the asks,
with the difference that we generate reserve prices for
each resource type instead of a total ask value.
All the available random distributions and their
default parameters are summarized in Table 2. We
denote the base price of resource k as p
∗
k
.
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
64
Table 2: Distributions and default parameters in CAGE.
Category Distribution Default parameters
normal µ = 1000, σ = 250
Bundle uniform min=500,max=1500
size exponential λ = 0.005, offset 20l
beta α = 5, β = 1, ×200l
constant 1000
Resource normal µ = l/2,σ = l/4
type uniform min = 0, max = l −1
sparse 2 resource types
Base uniform p
∗
k
: min = 0.1,
prices max = 0.9
normal p
∗
k
: µ = 0.5,σ = 0.2
Unit uniform v
∗
ik
: min = p
∗
k
−0.1,
prices max = p
∗
k
+ 0.1
normal v
∗
ik
: µ = p
∗
k
,σ = 0.05
5 EVALUATION
We compared all the algorithms in the portfolio un-
der various input conditions, in order to evaluate their
performance and solution quality. To that end, we se-
lected two essential metrics: execution time and so-
cial welfare. In most cases, we normalized the wel-
fare by the optimal welfare (computed with MILP).
Below we present our evaluation scenarios.
5.1 Average Case
We wish to find the best algorithm in the average case.
Therefore, we generated 3226 problem instances us-
ing CAGE’s default parameters and different combi-
nations of the available distributions. We used both
additive bids, as well as three different positive addi-
tivity parameters. We fixed the number of bids, asks
and resources as follows: n = m = 200,l = 50. We
did not increase the problem size further in order to
be able to include in our comparison the optimal al-
gorithm, which has exponential time complexity. The
results are depicted in Fig. 1.
We notice large differences in both welfare and
execution time between the algorithms in the portfo-
lio. The algorithms based on the linear relaxation of
the integer program (SS and RLPS) are the least per-
formant, since the execution time is longer than most
algorithms in the portfolio, while the social welfare is
on average less than 25% of the optimal welfare (with
high standard deviation).
The algorithms with the highest welfare are the
ones based on Greedy-IV: Hill-III, Hill-IV, SA-III and
Casanova. Although Casanova and SA-III achieve, on
average, the same or slightly lower welfare than the
hill climbing algorithms III and IV, they are 12 to 15
times faster, on average, and thus equally attractive
options. Even the Greedy-IV algorithm computes, on
average, a welfare that is almost 90% of the optimal
one, which is surprisingly high, as well as extremely
fast. We notice, however, a high standard deviation
for Greedy-IV due to the fact that ordering the bids by
density is a coarse approximation that does not work
well in all possible input scenarios. The Greedy-IV-
based algorithms achieve near-optimal welfare, which
can be explained by the fact that provider goods are
treated separately and all constraints of resource lo-
cality and bid monotonicity are relaxed. We believe
that adding such constraints to our problem formula-
tion, namely having each provider offering a bundle
to be sold to a single bidder, would make the problem
harder and most likely would make the approxima-
tions worse. This interesting hypothesis is, however,
the subject of future work, and will require adapting
all the algorithms to the new problem formulation.
The Greedy-II-based algorithms roughly enforce
the resource locality constraints, in the sense that for
each bid, they try as much as possible to allocate all
resources from the same provider. If this is a desired
feature, it must be noted that the resulting social wel-
fare is low, around 27% of the optimal welfare, for
Greedy-II (variations 1,2,3), Hill-I, Hill-II and GA-I.
The fact that the hill climbing algorithms do not sig-
nificantly improve the greedy allocation suggests that
they get stuck in a local maximum close to the initial
greedy solution. This hypothesis is confirmed by the
more than doubling of welfare brought on by the sim-
ulated annealing algorithms (SA-I and SA-II), which
mitigate this exact problem through randomization.
5.2 Best Algorithm
As shown in Fig. 1(a), several algorithms yield near-
optimal welfare on average. At the same time, even
the algorithms that perform poorly on average (com-
puting a welfare < 30% of the optimal one) can in a
few cases result in high welfare. These cases are de-
picted by outliers found even above the 90% line.
To obtain a clear picture of which algorithm in
the portfolio actually performs best, we analyzed the
dataset constructed for our first test case. For each
problem instance, we compared the social welfare
computed by all the approximate algorithms and se-
lected the algorithm with the highest welfare, and,
when multiple algorithms yielded the same welfare,
the fastest algorithm. We counted the number of in-
stances for each algorithm and summarized the results
in Table 3. We notice that there is no clear winner
of the portfolio, with the results being almost equally
Approximate Algorithms for Double Combinatorial Auctions for Resource Allocation in Clouds: An Empirical Comparison
65
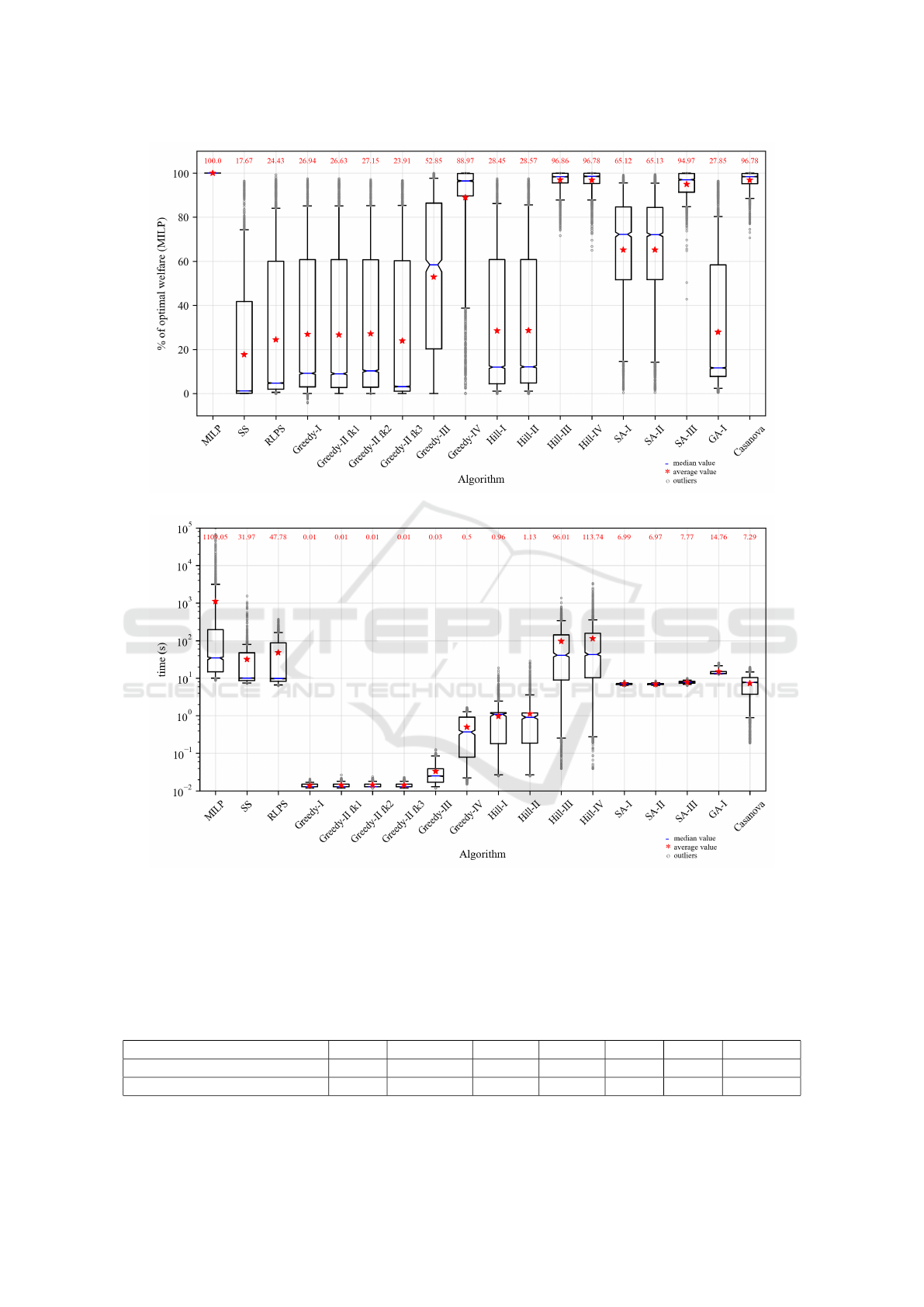
(a) Social welfare, normalized by the optimal welfare computed with MILP
(b) Execution time
Figure 1: Results from a comprehensive parameter sweep through the input space: different combinations of available dis-
tributions in CAGE with default parameters and 4 different additivity parameters. The average value for each algorithm is
represented by a red star, with the actual value attached at the top of each box. The boxes extend from the lower to the upper
quartile values of the data, with a blue line at the median. The notches around the median represent the confidence interval
around the median. The whiskers reach from 5% to 95% of the data. The remaining data are represented as outliers with gray
circles. A logarithmic scale was used for the y-axis of Fig. 1(b) for better readability.
Table 3: Breakdown of results by best algorithm: number of instances where each algorithm outperforms all the other algo-
rithms in the portfolio (absolute numbers and percentage of total instances on which the portfolio was ran).
Algorithm RLPS Greedy-IV Hill-III Hill-IV SA-I SA-III Casanova
Number of instances 6 753 1021 566 2 54 824
Percentage of total instances 0.18% 23.34% 31.64% 17.54% 0.06% 1.67% 25.54%
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
66
distributed among a few Greedy-IV-based algorithms:
Greedy-IV, Hill-III, Hill-IV and Casanova. Further-
more, in a few cases (1.89%), other algorithms (SA-I,
SA-III, RLPS) output the highest social welfare.
This result reinforces the need for consistent
benchmarking efforts of approximate algorithms for
the WDP. A fair comparison can only be ensured
through applying the algorithm portfolio on a unique
problem formulation, coupled with a wide range of
test cases that can uncover each algorithm’s strengths.
Our work on standardizing all the existing algorithms
on the proposed problem formulation (tailored to
cloud resource allocation), as well as the novel input
generator for combinatorial auctions CAGE, aims at
tackling this issue.
5.3 Effect of Randomization
Since some algorithms in the portfolio are stochas-
tic (Casanova, genetic and simulated annealing), they
will yield different results for different runs on the
same input. It is desirable to have small variations
in welfare between runs. Thus, for each stochastic al-
gorithm we performed 100 runs on the same problem
instance, and recorded the social welfare.
Fig. 2 shows the percentual variations for each al-
gorithm with respect to the mean of the 100 runs. We
performed this normalization in order to have a com-
parative overview over all the algorithms. The plot
contains events from 100 different instances with 100
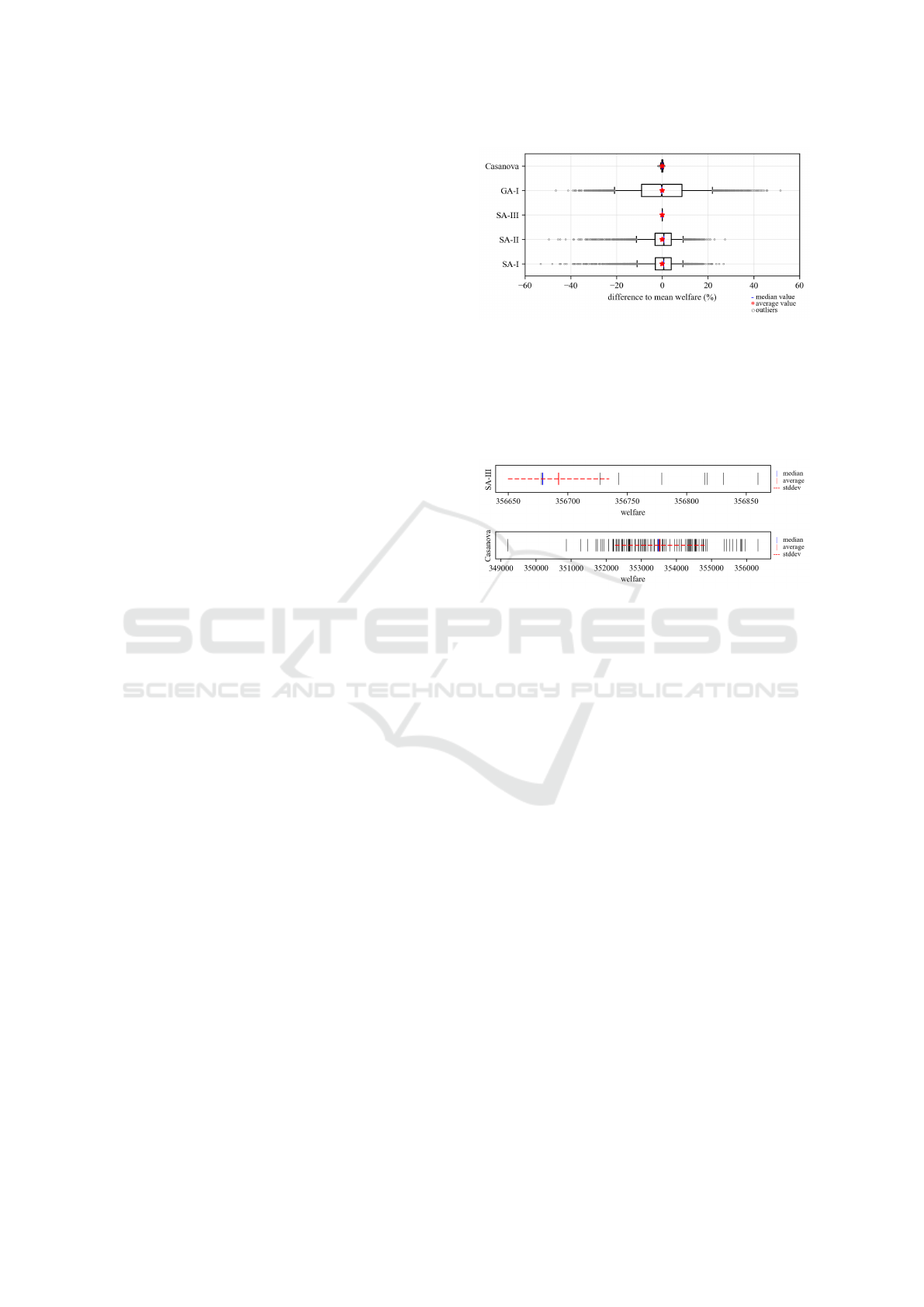
runs each. The highest variation is seen in the Greedy-
II-based algorithms, most pronounced for the GA-I
algorithm, where the lower and upper quartile values
of the data are at about −9% and +8.6% of the mean
value. This result reinforces the idea that the solution
quality of Greedy-II-based algorithms, where soft lo-
cality constraints are enforced, is highly dependent on
ordering of bids and asks, and even small changes can
lead to very different results. In order to use these al-
gorithms reliably, multiple runs are necessary, and the
best solution can be used in the end. This would, how-
ever, increase the execution time.
Fig. 3 shows the absolute welfare values from 100
runs on a single instance for Casanova and SA-III,
the algorithms based on Greedy-IV. For this particu-
lar instance, SA-III computes a higher welfare than
Casanova. Although the standard deviation is low
in both cases (0.012% and 0.36% from mean), SA-
III also produces a lower number of unique solutions,
converging to a few solutions in the search space: 9
local maxima for 100 runs. The SA-III algorithm is
more likely to converge than Casanova due to the de-
creasing temperature variable which forces a decrease
in the acceptance probability of worse solutions in the
Figure 2: Variation in social welfare for the stochastic algo-
rithms: results from 100 different input instances, with 100
runs per instance. The difference of each run to the average
value of the respective instance, normalized by that average
value, is plotted. The average value (red star) is always at 0.
The boxes extend from the lower to the upper quartile, with
a blue line at the median. The whiskers reach from 5% to
95% of the data, and the rest are outliers (gray circles).
Figure 3: Absolute welfare values computed by two algo-
rithms (SA-III and Casanova) on a single input instance,
with 100 repetitions. Average value (vertical red line), me-
dian value (vertical blue line) and ± one standard deviation
from the mean (horizontal dashed red line) are also plotted.
search space. The results in Fig. 3 confirm this asser-
tion. However, there is no guarantee that SA-III will
always lead to better solutions than Casanova.
6 RELATED WORK
In the previous sections, we referred to existing work
on various approximate algorithms for solving the
WDP (Nejad et al., 2015; Lehmann et al., 2002;
Holte, 2001; Zurel and Nisan, 2001; Bertocchi et al.,
1995; Hoos and Boutilier, 2000; Chu and Beasley,
1998; Khuri et al., 1994; Fujishima et al., 1999).
While each aforementioned paper compares its newly
introduced algorithm to other algorithms in the liter-
ature, there is no attempt, to our knowledge, to ex-
perimentally compare all the existing algorithms in a
more systematic and consistent manner.
(Leyton-Brown et al., 2000) have worked in this
direction by proposing CATS, a “universal test suite”:
a wide range of economically motivated test scenar-
ios consisting of artificially generated data. However,
they focus on optimal algorithms and compare their
runtime to predict the hardness of a problem instance.
Approximate Algorithms for Double Combinatorial Auctions for Resource Allocation in Clouds: An Empirical Comparison
67

In contrast, we focus on approximate algorithms to
accommodate large-scale auctions and use social wel-
fare to compare them. Furthermore, our input gener-
ator can deal with multi-unit multi-good double auc-
tions, as opposed to single-unit multi-good one-sided
auctions for CATS, but we simplified our approach by
not considering dependencies between goods.
7 CONCLUSION
In this paper, we performed a systematic and com-
prehensive comparison of approximate algorithms for
winner determination in double combinatorial auc-
tions. We created an algorithm portfolio and found
that only a subset of the algorithms compute near-
optimal welfare in the average case. However, our
analysis revealed that there is no clear portfolio win-
ner, and the algorithms’ performance highly depends
on the input. In the future, we will perform a deeper
analysis to identify the input characteristics which in-
fluence the solution quality and we will employ ma-
chine learning methods to predict the algorithms’ per-
formance. Moreover, we argue for the need to har-
monize benchmarking efforts and propose a flexible
approach to generate artificial data. In the future, we
will integrate real cloud data in the input generator by
using up-to-date prices, as well as analyzing public
cloud workloads and extracting relevant parameters
to fit them to certain random distributions.
REFERENCES
Amazon (2017). Amazon ec2 pricing. https://aws.amazon.
com/ec2/pricing. Accessed: 10. 11. 2017.
Bertocchi, M., Butti, A., Słomi
˜
n ski, L., and Sobczyn-
ska, J. (1995). Probabilistic and deterministic lo-
cal search for solving the binary multiknapsack
problem. Optimization, 33(2):155–166. doi:
10.1080/02331939508844072.
Buyya, R., Yeo, C. S., and Venugopal, S. (2008). Market-
oriented cloud computing: Vision, hype, and reality
for delivering it services as computing utilities. In
High Performance Computing and Communications,
2008. HPCC’08. 10th IEEE International Conference
on, pages 5–13. IEEE. doi: 10.1109/HPCC.2008.172.
Chu, P. C. and Beasley, J. E. (1998). A genetic al-
gorithm for the multidimensional knapsack prob-
lem. Journal of heuristics, 4(1):63–86. doi:
10.1023/A:1009642405419.
CloudStack (2017). Apache cloudstack. https://cloudstack.
apache.org/. Accessed: 10. 11. 2017.
Cormen, T. H., Leiserson, C. E., Rivest, R. L., and Stein,
C. (2001). Greedy algorithms. Introduction to algo-
rithms, 1:329–355.
De Vries, S. and Vohra, R. V. (2003). Combinatorial auc-
tions: A survey. INFORMS Journal on computing,
15(3):284–309. doi: 10.1287/ijoc.15.3.284.16077.
Facebook (2012). Facebook workload repository.
https://github.com/SWIMProjectUCB/SWIM/wiki.
Accessed: 10. 11. 2017.
Fujishima, Y., Leyton-Brown, K., and Shoham, Y. (1999).
Taming the computational complexity of combinato-
rial auctions: Optimal and approximate approaches.
In IJCAI, volume 99, pages 548–553.
Goldberg, D. E. and Deb, K. (1991). A comparative analy-
sis of selection schemes used in genetic algorithms.
Foundations of genetic algorithms, 1:69–93. doi:
10.1016/b978-0-08-050684-5.50008-2.
Gonen, R. and Lehmann, D. (2000). Optimal solutions for
multi-unit combinatorial auctions: Branch and bound
heuristics. In Proceedings of the 2nd ACM conference
on Electronic commerce, pages 13–20. ACM. doi:
10.1145/352871.352873.
Gudu, D., Hardt, M., and Streit, A. (2016). On mas-
based, scalable resource allocation in large-scale,
dynamic environments. In Ubiquitous Intel-
ligence & Computing, Advanced and Trusted
Computing, Scalable Computing and Commu-
nications, Cloud and Big Data Computing, In-
ternet of People, and Smart World Congress
(UIC/ATC/ScalCom/CBDCom/IoP/SmartWorld),
2016 Intl IEEE Conferences, pages 567–574. IEEE.
doi: 10.1109/UIC-ATC-ScalCom-CBDCom-IoP-
SmartWorld.2016.0097.
Holte, R. C. (2001). Combinatorial auctions, knapsack
problems, and hill-climbing search. In Conference
of the Canadian Society for Computational Studies of
Intelligence, pages 57–66. Springer. doi: 10.1007/3-
540-45153-6 6.
Hoos, H. H. and Boutilier, C. (2000). Solving combinatorial
auctions using stochastic local search. In AAAI/IAAI,
pages 22–29.
IBM (2017). Ilog cplex 12.6.3. http://www-03.ibm.com/
software/products/en/ibmilogcpleoptistud. Accessed:
10. 11. 2017.
Kellerer, H., Pferschy, U., and Pisinger, D. (2004). Intro-
duction to np-completeness of knapsack problems. In
Knapsack problems, pages 483–493. Springer.
Khuri, S., B
¨
ack, T., and Heitk
¨
otter, J. (1994). The
zero/one multiple knapsack problem and genetic algo-
rithms. In Proceedings of the 1994 ACM symposium
on Applied computing, pages 188–193. ACM. doi:
10.1145/326619.326694.
Kirkpatrick, S., Gelatt, C. D., Vecchi, M. P., et al.
(1983). Optimization by simulated annealing.
science, 220(4598):671–680. doi: 10.1126/sci-
ence.220.4598.671.
Lehmann, D., M
¨
uller, R., and Sandholm, T. (2006).
The winner determination problem. Combinato-
rial auctions, pages 297–318. doi: 10.7551/mit-
press/9780262033428.003.0013.
Lehmann, D., O
´
callaghan, L. I., and Shoham, Y. (2002).
Truth revelation in approximately efficient combinato-
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
68

rial auctions. Journal of the ACM (JACM), 49(5):577–
602. doi: 10.1145/585265.585266.
Leyton-Brown, K., Pearson, M., and Shoham, Y. (2000).
Towards a universal test suite for combinatorial auc-
tion algorithms. In Proceedings of the 2nd ACM con-
ference on Electronic commerce, pages 66–76. ACM.
doi: 10.1145/352871.352879.
Luenberger, D. G. and Ye, Y. (2015). Linear and non-
linear programming, volume 228. Springer. doi:
10.1007/978-3-319-18842-3.
Myerson, R. B. and Satterthwaite, M. A. (1983). Effi-
cient mechanisms for bilateral trading. Journal of
economic theory, 29(2):265–281. doi: 10.1016/0022-
0531(83)90048-0.
Nejad, M. M., Mashayekhy, L., and Grosu, D. (2015).
Truthful greedy mechanisms for dynamic virtual ma-
chine provisioning and allocation in clouds. Paral-
lel and Distributed Systems, IEEE Transactions on,
26(2):594–603. doi: 10.1109/TPDS.2014.2308224.
Nisan, N. et al. (2007a). Introduction to mechanism design
(for computer scientists). Algorithmic game theory,
9:209–242.
Nisan, N., Roughgarden, T., Tardos, E., and Vazirani, V. V.
(2007b). Algorithmic game theory, volume 1. Cam-
bridge University Press Cambridge.
Openstack (2017). Openstack. https://www.openstack.org/.
Accessed: 10. 11. 2017.
Padberg, M. and Rinaldi, G. (1991). A branch-and-cut algo-
rithm for the resolution of large-scale symmetric trav-
eling salesman problems. SIAM review, 33(1):60–100.
doi: doi.org/10.1137/1033004.
Pfeiffer, J. and Rothlauf, F. (2008). Greedy heuristics
and weight-coded eas for multidimensional knapsack
problems and multi-unit combinatorial auctions. In
Operations Research Proceedings 2007, pages 153–
158. Springer. doi: 10.1007/978-3-540-77903-2 24.
Rappa, M. A. (2004). The utility business model and the
future of computing services. IBM systems journal,
43(1):32–42. doi: 10.1147/sj.431.0032.
Russell, S. and Norvig, P. (2010). Beyond classical search.
Artificial Intelligence, A Modern Approach, pages
125–128.
Samimi, P., Teimouri, Y., and Mukhtar, M. (2014). A com-
binatorial double auction resource allocation model
in cloud computing. Information Sciences. doi:
10.1016/j.ins.2014.02.008.
Sandholm, T. (2002). An algorithm for optimal win-
ner determination in combinatorial auctions. Artifi-
cial intelligence, 135(1):1–54. doi: 10.1016/S0004-
3702(01)00159-X.
Schnizler, B., Neumann, D., Veit, D., and Wein-
hardt, C. (2008). Trading grid services–a multi-
attribute combinatorial approach. European Jour-
nal of Operational Research, 187(3):943–961. doi:
10.1016/j.ejor.2006.05.049.
Whitley, D. and Starkweather, T. (1990). Genitor ii: A dis-
tributed genetic algorithm. Journal of Experimental &
Theoretical Artificial Intelligence, 2(3):189–214. doi:
10.1080/09528139008953723.
Wilkes, J. (2011). More Google cluster data. Google
research blog. Posted at http://googleresearch.blog
spot.com/2011/11/more-google-cluster-data.html.
Zurel, E. and Nisan, N. (2001). An efficient approx-
imate allocation algorithm for combinatorial auc-
tions. In Proceedings of the 3rd ACM conference on
Electronic Commerce, pages 125–136. ACM. doi:
10.1145/501158.501172.
Approximate Algorithms for Double Combinatorial Auctions for Resource Allocation in Clouds: An Empirical Comparison
69
