
Intelligent and Distributed Solving of Multiphysics Problems
Coordinated by Software Agents
An Intelligent Approach for Decentralized Simulations
Desirée Vögeli
1
, Sebastian Grabmaier
2
, Matthias Jüttner
2
, Michael Weyrich
1
,
Peter Göhner
1
and Wolfgang M. Rucker
2
1
Institute of Industrial Automation and Software Engineering, University of Stuttgart,
Pfaffenwaldring 47, 70569 Stuttgart, Germany
2
Institute for Theory of Electrical Engineering, University of Stuttgart, Pfaffenwaldring 47, 70569 Stuttgart, Germany
Keywords: Multiphysics Simulation, Software Agent, Distributed System, Case-based Reasoning.
Abstract: This paper presents an intelligent approach to support engineers with performing computational simulation
of new developments and prototypes. With multiple interacting physical effects and large three dimensional
models the choice of the right solution strategy is crucial for a correct solution and an acceptable calculation
time. The presented multi-agent system can solve these simulation tasks using distributed heterogeneous
computation resources with the objective to reduce the calculation time. An important factor for the criterion
time is the choice of the linear solver. Here a case-based reasoning concept is introduced to improve the
decisions in the multi-agent system. Allowing each agent to solve its problem part by using appropriate
solution methods, a decentralized architecture with autonomous software agents is provided.
1 INTRODUCTION
Nowadays, our daily life becomes more and more
affected by intelligent assistance systems. Industrial
automation systems interact with each other to build
individual products (Jazdi, 2014), kitchen devices are
communicating with each other (Blasco et al., 2014),
and cars are driving autonomously (Zhang et al.,
2016). These things assist their users based on
improving automation technology. Even if the things
are built and run automatically, their development
must be done by an engineer.
In times of workforce deficits in the engineering
domain and an ever shorter time to market, engineers
have to manage many tasks. When developing a new
system, they have to check different approaches. Due
to missing time decide must be based on their
experiential knowledge. This results in missing better
solutions. Therefore, they need support in form of
software tools and assistance systems. Up to now
there are only a few assistance systems to support the
development processes of systems by creating new
solutions on their own. One of these is Depias (Beyer
et al., 2016). It allows an engineer to plan a logistic
system, finding different possible compositions, and
comparing them. Other concepts deliver methods to
generate code from models (Mozumdar et al., 2008)
or to automatically manage system requirements
(Lambersky, 2012). None of these approaches can be
used to develop a whole system yet, but they support
partially the engineering process. Another part of the
development process that is becoming more and more
important are simulations (Clement et al., 2017).
Simulations are used to analyze, optimize, and
understand system behaviors. They are also able to
assist at virtual commissioning and test verification.
An important type of simulations are so-called
multiphysics simulations for which different tools
exist. However most simulation tools are made for
single physics problems. All these tools need a huge
amount of computing power and time plus expertise.
These multiphysics problems become even bigger
due to the necessity of more detailed simulations.
Hence the systems become more complex and the
environment has to be considered (Tolk, 2016). That
is why this paper shows an approach of how to solve
200
Vögeli, D., Grabmaier, S., Jüttner, M., Weyrich, M., Göhner, P. and Rucker, W.
Intelligent and Distributed Solving of Multiphysics Problems Coordinated by Software Agents - An Intelligent Approach for Decentralized Simulations.
DOI: 10.5220/0006590402000207
In Proceedings of the 10th International Conference on Agents and Artificial Intelligence (ICAART 2018) - Volume 1, pages 200-207
ISBN: 978-989-758-275-2
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

multiphysics problems in parallel using software
agents inspired by the contract net protocol.
After the motivation and the introduction, chapter
2 describes multiphysics simulation and existing
approaches for parallelization. Afterwards
possibilities to decompose multiphysics problems are
given. The last part of chapter 2 introduces the
software agents and the concept to simulate the parts
in parallel. The procedure of this agent-based system
is shown in chapter 3 using an example. In chapter 4
a concept to improve the effectivity of the decisions
within the multi-agent system using case-based
reasoning is presented. Finally a conclusion and an
outlook are given in chapter 5.
2 DECOMPOSITION OF
MULTIPHYSICS PROBLEMS
FOR PARALLEL SIMULATION
To simulate multiphysics problems in a decentralized
way an approach to decompose the problem is
introduced. Therefore an introduction to multiphysics
simulation is given before the flexible and self-
organizing agent concept is presented.
2.1 Multiphysics Simulation
A multiphysics simulation analyzes relations between
different domains and their effects among
themselves. This is getting more and more important,
since model driven engineering and virtual
commissioning are significant topics today (Boschert
and Rosen, 2016). This simulations are used to
predict and to understand the behavior of a system,
often before building it. Thus a geometrical model of
the system is built. The included physical laws are
represented by partial differential equations or
integral equations. To simulate physical effects, the
model is discretized using e.g. the finite element
method (FEM) or the boundary element method
(BEM) (Gupta, 2002). Software tools such as
COMSOL Multiphysics (Dickinson et al., 2014) are
used. For solving the resulting linear equation system
different solvers exists. Some use direct methods and
others iterative ones. Direct methods mount the
matrix by a sequence of calculation steps. In iterative
methods, the results will be approximated until the
convergence criterion is reached.
To estimate which configuration is better suited
for a simulation task, experiential knowledge is
needed. And even then it is often impossible to
predict the best configuration before the simulation.
There are solvers that deliver for nearly every task a
simulation result and others that are good for only a
few ones but do these simulation in just a fraction of
time with less computational effort.
In order to meet the increasingly larger and more
complex models, the computational effort can be
spread over several distributed computers. Next to
classical high performance computing on a
supercomputer, there are other approaches to run
simulations in parallel on distributed heterogeneous
computing resources. In many approaches there is a
static decomposition before the simulation or the
simulation tool is made for exactly this use case. So
each one can just be used for very specific problem
setups. To solve different kinds of multiphysics
simulations in parallel, there must be a more general
attempt to decompose a multiphysics problem. A
more general approach is presented in (Vázquez et al.,
2016). The code Alya works on already discretized
models. But here, every partial problem must have the
same discretization and is calculated with the same
code. As computing resource a super computer is
used, but super computers are expensive.
However, if a model is updated in the presented
approaches, for example by adding a new physical
domain, everything must be simulated again and the
configuration must be updated, too. That is why in
this paper a more flexible approach is introduced,
which uses idle and already existing personal
computers (PC) and servers.
2.2 Decomposition of Multiphysics
Problems
With the decomposition of multiphysics problems,
there are two goals that should be reached. The first
goal is to enable calculation resources with less
calculation power to assist in the distributed
simulation process, for example if they don’t have
enough memory to load the problem or if they just
have the ability to simulate parts like the heat transfer
but not electromagnetic waves. The second goal is to
use different methods to get a better result in shorter
time. In some cases it can be an opportunity to
simulate different areas or different physical effects
with different methods and configurations (Buchau et
al., 2003; Fetzer et al., 1999). Some approaches to
decompose a problem for distributed calculation is
shown in Figure 1.
To reduce the computational effort for one
resource, there is the possibility to simulate the
physical effects separately. This works on most
weakly coupled problems. Another possibility to
reduce the computational effort is to cut the model in
Intelligent and Distributed Solving of Multiphysics Problems Coordinated by Software Agents - An Intelligent Approach for Decentralized
Simulations
201
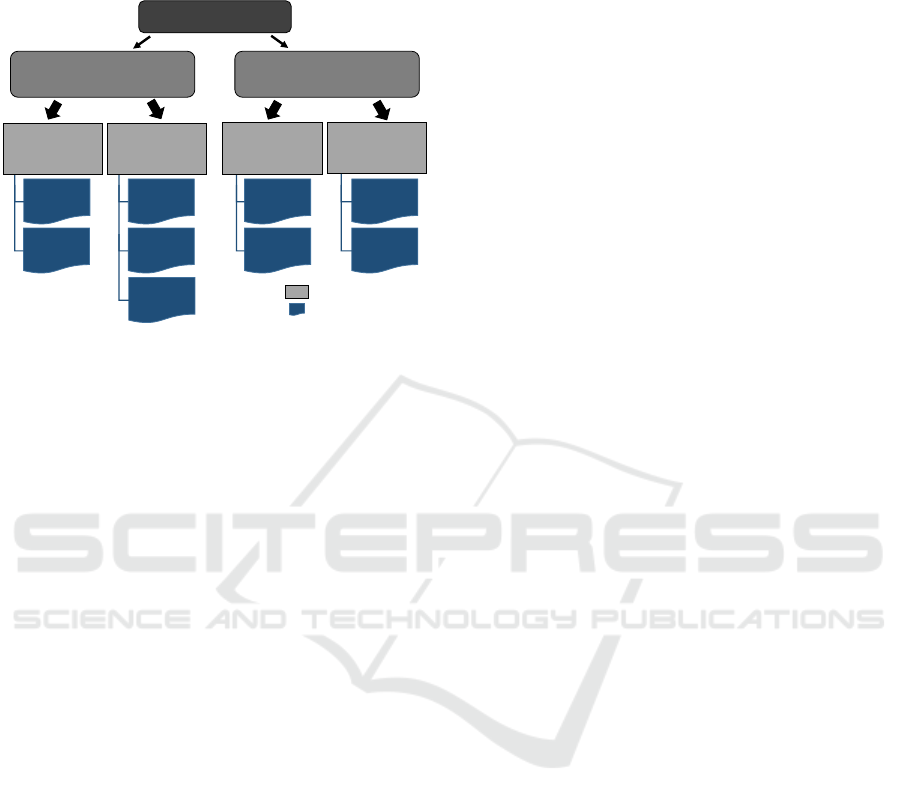
parts. To reduce the calculation time various
simulation configuration like the solver or the method
(FEM, BEM) can be evaluated.
Figure 1: Objectives and approaches for decomposition of
multiphysics simulation problems.
When no coupling between the physical effects
exists, parallel calculation is trivial. Considering uni-
or bidirectional coupling between the physics,
information must be exchanged during the
simulation. For this exchange an intelligent resource
management is needed. One approach for this are
agent-based systems.
2.3 Agent-based Concept for a
Distributed System
To simulate the coupled problem parts on distributed
calculation resources software agents are used to
manage the solution process. Software agents are
autonomous software units able to interact with the
environment and communicate with each
other (Jennings and Wooldridge, 1996). The ability to
communicate is used to exchange information
between coupled problem parts. Therefore, the agents
use an agent communication language (ACL) based
on the guidelines of the Foundation for Intelligent
Physical Agents (FIPA, 2002). The ACL is based on
the human speech act and allows to structure
conversations. So, there is the possibility to add in
addition to an identifier a performative to a message,
such as INFORM, PROPOSE, AGREE, and many
others.
To manage the solving process next to an agent
management system (AMS) that cares for the
message transport and the directory facilitator (DF) as
yellow pages, three kinds of agents are developed: a
coordination, a calculation and a report agent. The
report agent that provides state news from all agents
received by messages isn’t regarded in the further
paper because it isn’t necessary for the calculations.
2.3.1 Coordination Agent
In the multi-agent system (MAS) there is one
coordination agent that manages the simulation
process. It gets the simulation task from the user and
informs the other agents about the new model and the
decomposition possibilities. It also supervises the
distribution process among the agents and decides
about the offers made by the calculation agents. With
the coordination agent’s graphical user interface, it is
possible to stop simulations or to update the model.
This can be used to integrate another physical effect.
2.3.2 Calculation Agent
The MAS contains many calculation agents. The
calculation agents have the task to do the partial
simulations. Thus they have the knowledge of the
necessary steps to simulate a model. A calculation
agent can have different abilities depending on the
calculation resource on which it runs and the
simulation software that is installed. Based on these
abilities they bid for the part problems they want to
simulate. Additional and redundant calculations are
also supported to speed up the process. As soon as a
calculation agent received the confirmation to a
partial problem it starts the calculation using various
software packages. To guarantee global convergence,
which means the fulfillment of all constraints rising
from couplings between partial problems, it
exchanges results with other agents involved.
Relevant results from other agents are considered in
their own solutions. If the local convergence criterion
is reached and no changes in the relevant results
occur, the partial problem is terminated. When all
partial problems are terminated, the global solution is
completed. The calculation agents also provide
interim results and the result to the user.
3 AN EXAMPLE ON
DISTRIBUTED AGENT-BASED
SIMULATION
In this chapter the solving procedure of the prototype
is illustrated using a realistic example. The prototype
implements the agents using the framework JADE
(Java Agent Developing framework) (Bellifemine et
al., 2007). Next to the presented agents in chapter 2.4,
an AMS and a DF are used. As bidirectional coupled
multiphysics problem microwave and dielectric
same
material
attributes
heat
transfer
direct FEM
same
physical
effects
decomposition
goal: get results in less time
goal: reduce calculation
capabilities for one resource
electro-
magnetic
waves
electric
current
iterative BEM
examples
approaches
area
distribution
physical
effects
distribution
solver
configuration
methods
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
202
heating is used for demonstration. Here a lossy
dielectric medium (water) in a waveguide is
considered. Hence the time harmonic electromagnetic
wave equation (EMW) and the heat transfer (HT) are
regarded. The underlying system of differential
equations is given by
with the electric field
, the electric current density
,
the temperature field T, the angular frequency ω, and
the thermal conductivity κ. Taking temperature
dependent conductivity and permittivity
into
account the wave number reads
With the vacuum permeability
and the vacuum
permittivity
.
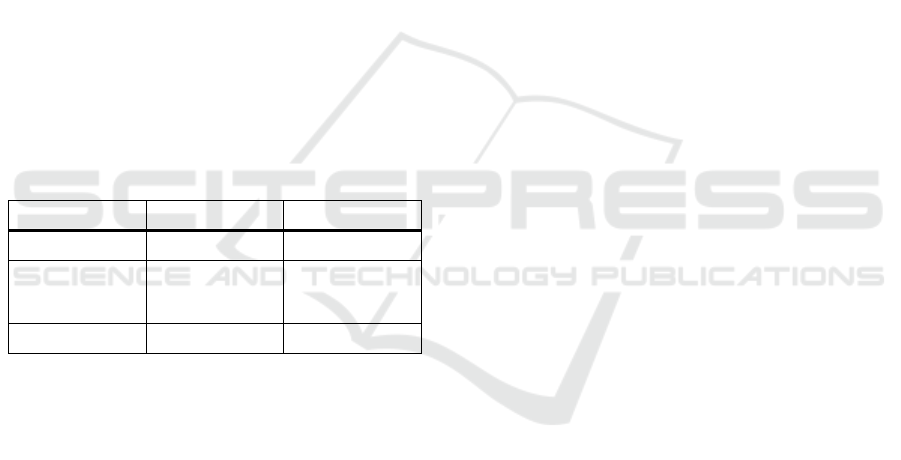
To simulate the problem three calculation
resources are used, listed in table 1. The data
exchange between the calculation resources uses
LAN technology. The access to the simulation tools
is realized by a Java interface.
Table 1: Available calculation resources.
PC 1
PC 2
PC 3
16 GB RAM
8 GB RAM
8 GB RAM
Intel® Core™
i7-3520M CPU
@ 2.90 GHz
Intel® Core™
i5 CPU 650 @
3.20 GHz
Intel® Core™
i5 CPU 650 @
3.20 GHz
tool for EMW
tool for EMW
tool for HT
There are three phases for the MAS that are
explained in the next sub-sections: initialization,
decomposition, and solving.
3.1 Initialization Phase
First, all agents must be started. Each PC runs one
calculation agent (CalcA). PC 3 also runs the AMS,
the DF, and the coordination agent (CoordA). After
starting, the CoordA connects with the software tool.
The CoordA registers at the DF and starts the GUI,
where the user can load a model. The CalcAs CA1,
CA2, and CA3 on PC 1, PC 2, and PC3 connect with
the software tools. Then they check the performance
of their resource and register at the DF. Last the
CalcAs look for the CoordA using the DF and
subscribe, so that they will be informed when a new
model is available. After this initialization phase is
done, the MAS waits for the user to load a model.
3.2 Decomposition Phase
The goal of the decomposition phase is to manage the
decomposition of a model and to distribute the parts
to the system resources. The necessary
communication between the agents for the example
based on a dynamic allocation negotiation is shown
in Figure 2. As soon as the user loads a new model,
the coordination agent analyses it on splitting
possibilities and informs the CalcAs that have
subscribed. Now all agents aim to find the best
allocation of the problem parts. To get an overview of
the different problem parts, the CalcAs request a price
list from the CoordA that contains the parts and the
current biddings. Next the CalcAs have to make their
decision on which part to bid depending on their
abilities. The better the calculation power of a
resource, the more money the agent has to bid on
parts. Also dynamic abilities like utilization are
considered. The CoordA checks the biddings and
updates the price list if there is a higher bidding. It
also informs the formerly highest bidder and the new
highest bidder about the new list. As soon as an agent
has its problem part it starts calculating.
In this example the CA3 bids on the HT problem
part. The other two CalcAs both bid on the EMW
problem part. Therefore, they are overbidding each
other as long as the one with the better resource gets
the problem. However, the other agent is simulating
the EMW part with other simulation configuration
and tries to provide the result faster.
With this procedure the most promising variants
are computed on the best calculation resources. The
phase is finished when all problem parts are allocated.
If a model becomes updated, the new part is allocated
the same way to the CalcAs.
3.3 Solving Phase
During the solving phase the agents simulate their
partial problems. To take care of dependencies, the
agents cooperate with each other. So the first step of
this phase is, that every calculation agent informs all
others about the start of its task. Then the calculation
agents analyze which other problem part depends on
their own one. Next they subscribe to the calculation
agents that simulate the related parts. Here, the agent
with the HT problem part is interested in all results
about the EMW and the agents with the EMW
problem parts are interested in the HT part. After the
subscription, the agents start the calculations.
Intelligent and Distributed Solving of Multiphysics Problems Coordinated by Software Agents - An Intelligent Approach for Decentralized
Simulations
203
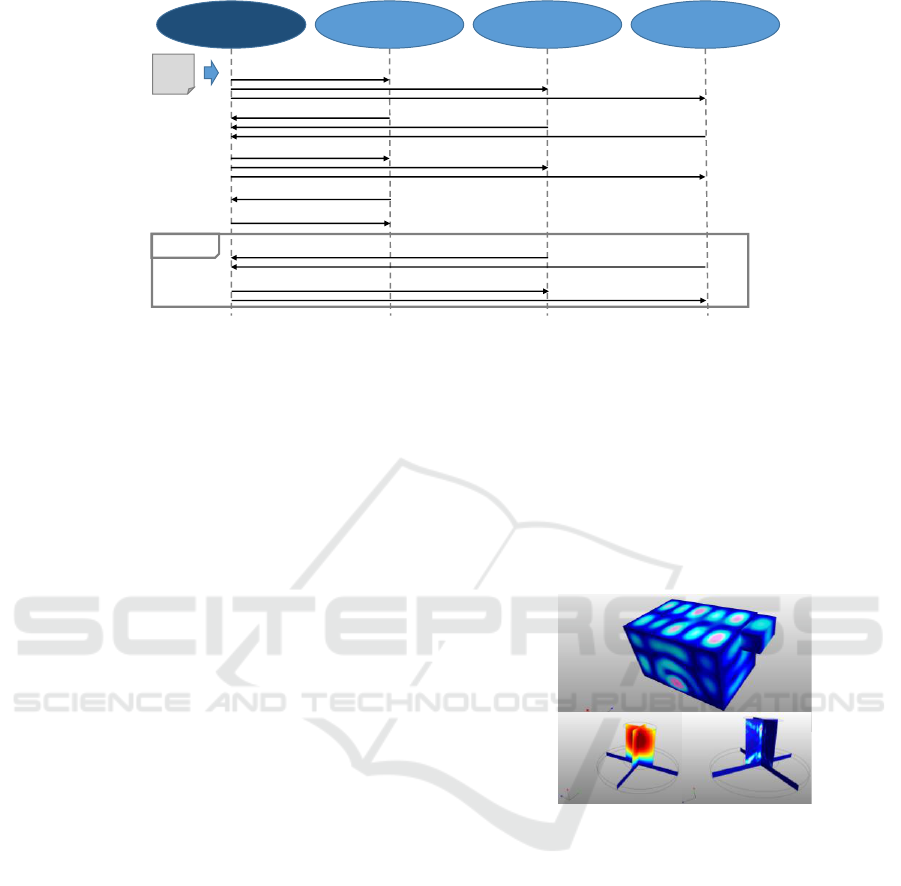
Figure 2: Communication during the decomposition phase.
Because of the lack of a stationary heat source in
the HT model, CA3 finishes soon and waits for results
from the EMW part to incorporate them as Joule’s
losses. When the first agent with the EMW problem
finds a result, it checks if the tolerances are within the
limits and if the result is already published. Here, it
isn’t published yet, so it sends a message with the
result information to the other agents. The other
agents check if their partial problem depends on the
results. Here CA3 requests the solution, since the
temperature depends on the heat sources. Before
publishing results that correspond to the convergence
criterion, the agents check, if they aren’t already
published. If so, they don’t publish them and just wait
for further results that may change something within
their own simulation. Once the convergence criterion
is reached and no agent is calculating anymore, the
simulation process is finished.
During the calculations, the user is able to add
further physical effects or couplings between them
into the simulation. When doing so the existing
solutions are reused as initial values.
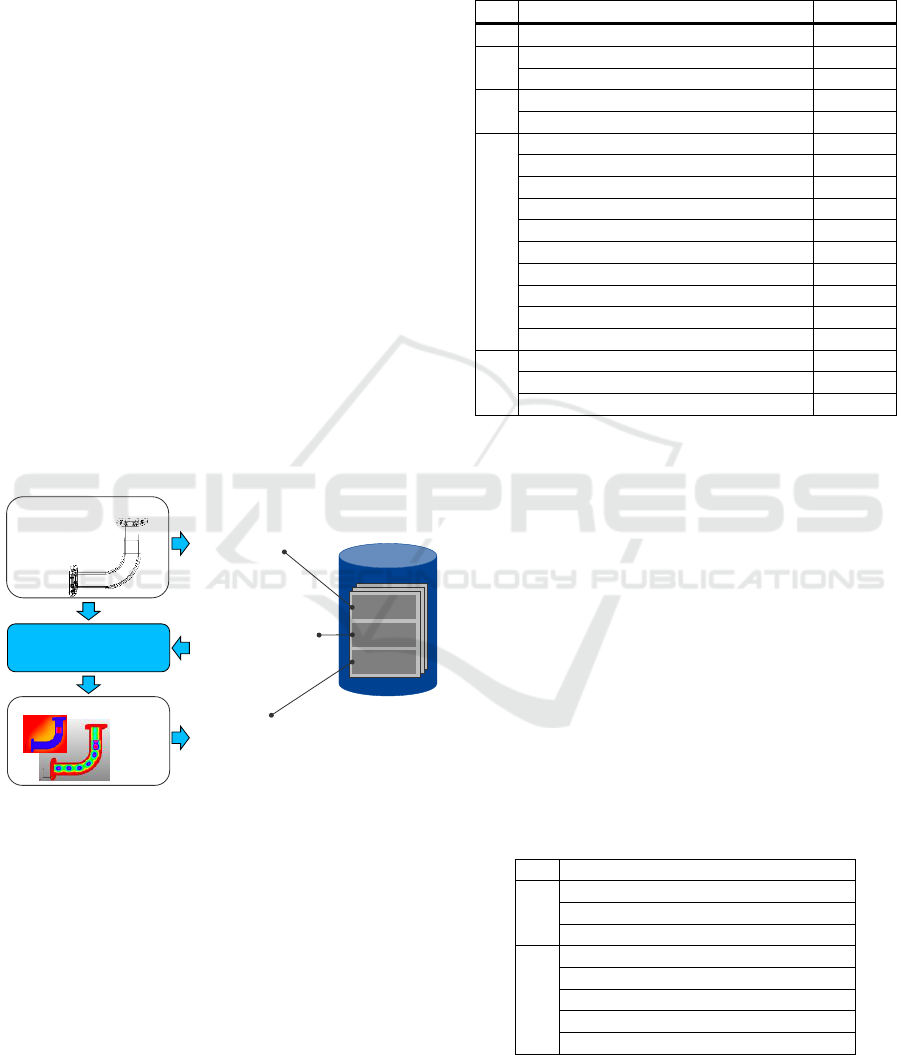
3.4 The Solution
The graphic diagrams in figure 3 shows the
simulation results for the electromagnetic wave and
the heat transfer in the water. The solutions are
presented by the agents, using a browser as graphic
interface.
Besides the decomposition based on physical
domains, the introduced MAS is able to decompose
the simulation task based on geometries. It is also able
to use different software tools and numerical methods
to get a good result (Grabmaier et al., 2016; Jüttner et
al., 2017). Further decomposition in space and time is
possible.
The decision, which solver configuration has to be
chosen if there is more than one resource capable to
simulate it, is made by the calculation agents based
on heuristics. Experienced engineers are able to
choose a suitable solver configuration by regarding
the model and the study. To imitate this human
behavior, our MAS is expanded to learn from solved
cases. Therefore a case-based reasoning approach is
used.
Figure 3: Simulation results of the calculation agents: Top
electric field strength on the surface of the waveguide,
Bottom left temperature inside the dielectric media, Bottom
right Joules losses inside the dielectric media.
4 USING CASE-BASED
REASONING TO IMPROVE
THE EFFICIENCY
Case-based reasoning (de Mantaras, 2001) is used in
the field of automated reasoning to use similar cases
that are already solved to adapt the solution instead of
building a new one from scratch. The case-based
reasoning process is divided into four steps:
• Retrieve: the new task is compared with the
already solved tasks to find a similar one
coordination
agent
CA3 (HT
software)
CA2 (EMW
software)
CA1 (EMW
software)
INFORM: load-model
REQUEST: price-list
AGREE: price-list
PROPOSE: price-list
INFORM: price-list
loop
PROPOSE: price-list
INFORM: price-list
model
EMW
EMW in
the inside
HT in the
inside
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
204
• Reuse: the solution of the similar already
solved task is adapted for the current one
• Revise: the new solution based on the
adaption is valuated
• Retain: the new case with its task and
solution is saved to reuse it in the future
The advantage of this method compared with neural
networks is, that there is no need for an initial
training. Solutions can be created using the
conventional way, if there is no similar case that can
be adapted. Neural networks are set up by a training
data set while case-based reasoning approaches learn
from case to case due to the increasing database.
Thus, the algorithm used to compare the similarity
must be created by an expert. Here this method is used
to optimize the choice of the linear solver. Thus, the
cases are the simulation models with their studies and
the used solver configuration.
4.1 Cases
To learn from cases, these must be saved in a data
base. Therefore, a structure is needed. Figure 4 shows
the structure of the cases for multiphysics
simulations, consisting of model properties, approach
parameters, and a grading.
Figure 4: Structure of multiphysics simulation cases.
4.1.1 Model Properties for Comparison
To reuse information about the solving process from
already solved cases, there must be a possibility to
compare them. This is made by the model properties.
An important property is the discipline, like HT or
EMW in the previous example. Considering EMW
simulation many properties are evaluated, shown in
table 2. The parameters are grouped in boundary
conditions (BC), material properties (M),
discretization and geometry (G). The parameters are
represented by booleans, by integers or floats, and
others that contain lists. All information are a priori
available using the model description.
Table 2: Model properties from electromagnetic waves
problems.
property name
type
hasPortIntegral
boolean
BC
hasPerfectlyMatchedLayers
boolean
isHermitian
boolean
G
maxGeometricalDistance
float
minGeometricalDistance
float
discretization
shapeOrder
integer
minSizeOfElements
float
maxSizeOfElements
float
minSkewness
float
averageSkewness
float
minQualityOfElementAngle
float
averageQualityOfElementAngle
float
averageElementsPerPenetrationDepth
float
minElementsPerPenetrationDepth
float
numberOfDegreeOfFredoms
integer
M
maxConductFact
float
waveNumber
array
maxImagWaveNumber
float
4.1.2 Approaches
To reuse the simulation configuration of already
calculated models, the information about how this old
cases were simulated must be saved. Here, the used
method, the software tool, and the solver
configuration are stored. The solvers have different
advantages and disadvantages, so there isn’t one that
is the best in any case (Meister, 2015). Some are slow
but solve the task in nearly any case, some are fast but
need much memory and some cannot even guarantee
to always find a solution. For the iterative applied
solvers there is also the choice of a suitable
preconditioner. The considered solver possibilities
for the electromagnetic wave physic are shown in
table 3.
Table 3: Considered solver configurations for simulation.
Solver
direct
MUMPS
Pardiso
Spooles
iterative
BiCGStab + left preconditioning
BiCGStab + right preconditioning
GMRES + left preconditioning
GMRES + right preconditioning
preconditioned CG
Since the solver choice doesn’t depend only on the
model properties but also on the computation abilities
5
numeric software tool
valuation:
• calculation effort
• result
• …
approach parameter:
• solver
• convergence criteria
• …
model properties:
• matrix structur
• matrix size
• symmetry
• …
case base
Eigen-
schaften
Einstell-
parameter
Bewertung
Eigen-
schaften
Einstell-
parameter
Bewertung
properties
parameter
valuation
system matrix:
[A]{x}={b}
multiphysics problem
simulation solution
Intelligent and Distributed Solving of Multiphysics Problems Coordinated by Software Agents - An Intelligent Approach for Decentralized
Simulations
205

of the resource, this is also considered and saved
together with the cases and their evaluations.
4.1.3 Result Evaluation
The evaluation of a case must be done after the
simulation is finished. Even bad tries must be saved,
so the configurations won’t be used again on a similar
problem. The most important evaluation criterion is if
the simulation was solved or not. Other criteria like
the computation time must be compared relative to
the computation abilities, like the random access
memory of the resource. The best evaluation can be
obtained by comparing different solver
configurations and their results.
4.2 Similarity to Other Cases
Often examples on case-based reasoning are using
only one attribute to compare cases. For the solver
configuration in simulations, cases are more complex
and can’t be described or compared by one parameter.
As described in chapter 4.1.1 the properties
additionally contain different kind of parameters.
There are parameters that have to match exactly and
parameters that should be in the same range to use the
same solver configuration. To measure the similarity
between a new case and the cases saved in the
database, the algorithm must take this into account. A
common function to name the similarity between
two cases c1 and c2 with n different parameter and
with the weights w
i
is given by
.
i
is the similarity between the cases in one
parameter. So multi-conditional cases are compared
considering different kind of parameters. To create
such an algorithm with appropriate weights a set of
data is analyzed by an expert.
Due to the decentralized architecture of the MAS,
the data is distributed and must be collected as well
as exchanged. This is done by our incooperation
concept.
4.3 Incooperation Concept
The cases and the database must be integrated to the
existing MAS. Thus, the database is cared for by a
new agent, the case base agent. It manages the old
cases and is able to present similar cases for received
properties. Thus a message with the properties as
content is send. To save new cases into the database,
it can receive the cases by a new ACL message with
the id new_case. Figure 5 shows the new structure of
the MAS and the additionally needed communication
ways.
Figure 5: MAS with integrated case-based reasoning
approach.
The first step when using case-based reasoning for
a new model is to find the model properties that are
needed for the similarity measurement. Here, the
coordination agent that receives the model from a
user is responsible. It analyzes the model and sends
the properties to the case base agent. If there are
similar cases, it uses them for creating a prioritized
price list as a basis for the bidding process. If there
are no similar cases the previous concept is used for
creating the price list. If there are just one or two cases
yet, another configuration can be tried in the case that
there are more calculation resources left.
The calculation agents bid on the parts. Thus they
check if they match the computation abilities for the
parts and configurations in the price list. With this
method the agents can decide on their own whether
the case can be adapted for their current simulation
tasks or not. After each simulation, the calculation
agents evaluate the results by comparing their
solutions and send the cases to the case base agent.
With the presented incooperation concept, the
data for each physical domain is collected and saved
centrally but the agents keep their autonomy. The
case-based reasoning assists them by the choice on
which partial problem to bid.
5 CONCLUSIONS
In this paper a multi-agent system is presented, which
is able to solve different multiphysics simulations on
distributed computation resources. The basic
functionality is shown on a microwave oven example,
considering electromagnetic waves and the heat
transfer. The MAS has also been successfully tested
for further models. Because of the difficulties to
choose the right solver configuration, a concept to
7
case base
Eigen-
schaften
Einstell-
parameter
Bewertung
Eigen-
schaften
Einstell-
parameter
Bewertung
properties
parameter
valuation
case base
agent
coordination
agent
calculation
agent
manage
database
add new
cases
ask for / receive
similar cases
consider old
cases when
creating the
price list
evaluate
simulation
process
multi-agent communication
extended tasks
ICAART 2018 - 10th International Conference on Agents and Artificial Intelligence
206

incorporate a case-based reasoning approach is given.
The case-based reasoning is used to support the
decisions made by the agents in concern of the solver
configuration. This extension allows the MAS to
learn like a human expert from model to model. The
selection of an appropriate linear solver is only one
approach where the proposed MAS collects
knowledge. Further this approach can be extended to
the more complicated case of nonlinear and/or time
dependent problems. The MAS can be regarded as
intelligent assistant system for multiphysics
simulations. It enables inexperienced users to
simulate complex problems on distributed, already
available resources using proven software tools.
ACKNOWLEDGEMENTS
The authors would like to thank the Deutsche
Forschungsgemeinschaft (DFG) for supporting the
project GekoProAg (RU 720/11-2 & WE 5312/8-2).
REFERENCES
Bellifemine, F., Caire, G., Greenwood, D., 2007.
Developing multi-agent systems with JADE. Wiley.
Beyer, T., Yousefifar, R., Göhner, P., Wehking, K.-H.,
2016. Agent-Based Dimensioning to Support the
Planning of Intra-Logistics Systems. IEEE 21st
International Conference on Emerging Technologies
and Factory Automation (ETFA).
Blasco, R., Marco, Á., Casas, R., Cirujano, D., Picking, R.,
2014. A smart kitchen for ambient assisted living.
Sensors, 14, pp. 1629-1653.
Boschert, S., Rosen, R., 2016. Digital twin—the simulation
aspect. In Mechatronic Futures, pp. 59-74, Springer
International Publishing.
Buchau, A., Rucker, W. M., Rain, O., Rischmüller, V.,
Kurz, S., Rjasanow, S., 2003. Comparison between
different approaches for fast and efficient 3-D BEM
computations. In: IEEE Transactions on Magnetics,
vol. 39, no. 3, pp. 1107-1110.
Clement, S. J., McKee, D. W., Romano, R., Xu, J., Lopez,
J. M., Battersby, D., 2017. The Internet of Simulation:
Enabling agile model based systems engineering for
cyber-physical systems. In: System of Systems
Engineering Conference (SoSE), pp. 1-6.
de Mantaras, R. L., 2001. Case-based reasoning. In:
Machine Learning and Its Applications, pp. 127-145,
Springer Berlin Heidelberg.
Dickinson, E. J., Ekström, H., & Fontes, E., 2014.
COMSOL Multiphysics®: Finite element software for
electrochemical analysis. A mini-review.
Electrochemistry communications, 40, pp. 71-74.
Fetzer, J., Kurz, S., Lehner, G., Rucker, W. M., Henninger,
P., Röckelein, R., 1999. Analysis of an actuator with
eddy currents and iron saturation: Comparison
between a FEM and BEM-FEM coupling Approach. In:
IEEE Transactions on Magnetics, vol. 35, no. 3, pp.
1793-1796.
Fipa, A. C. L., 2002. Fipa acl message structure
specification. Foundation for Intelligent Physical
Agents,
http://www.fipa.org/specs/fipa00061/SC00061G.html
(18.8. 2017).
Grabmaier, S., Jüttner, M., Vögeli, D., Rucker, W. M.,
Göhner, P., 2016. Numerical framework for the
simulation of dielectric heating using finite and
boundary element method. In: International Journal of
Numerical Modelling: Electronic Networks, Devices
and Fields.
Gupta, O. P., 2002. Finite and Boundary Element Methods
in Engineering. Balkema Publishers.
Jazdi, N., 2014. Cyber physical systems in the context of
Industry 4.0. In: IEEE International Conference on
Automation, Quality and Testing, Robotics, pp. 1-4.
Jennings, N., Wooldridge, M., 1996. Software agents. In
IEE review, 42(1), pp. 17-20.
Jüttner, M., Grabmaier, S., Vögeli, D., Rucker, W. M.,
Göhner, P., 2017. Coupled Multiphysics Problems as
Market Place for Competing Autonomous Software
Agents, In: IEEE Transactions on Magnetics, Vol. 53,
Issue 6.
Lambersky, V., 2012. Model based design and automated
code generation from Simulink targeted for TMS570
MCU. In: Education and Research Conference
(EDERC), pp. 225-228.
Meister, A., 2015. Numerik linearer Gleichungssysteme.
Springer Spektrum, Vol 5.
Mozumdar, M. M. R., Gregoretti, F., Lavagno, L.,
Vanzago, L., Olivieri, S., 2008. A framework for
modeling, simulation and automatic code generation of
sensor network application. In: 5th Annual IEEE
Communications Society Conference on Sensor, Mesh
and Ad Hoc Communications and Networks, 2008.
SECON'08, pp. 515-522.
Tolk, A., 2016. Tutorial on the engineering principles of
combat modeling and distributed simulation. In:
Proceedings of the 2016 Winter Simulation
Conference, pp. 255-269.
Vázquez, M., Houzeaux, G., Koric, S., Artigues, A.,
Aguado-Sierra, J., Arís, R., Taha, A., 2016. Alya:
Multiphysics engineering simulation toward exascale.
In: Journal of Computational Science, 14, pp. 15-27.
Zhang, X., Gao, H., Guo, M., Li, G., Liu, Y., Li, D., 2016.
A study on key technologies of unmanned driving.
CAAI Transactions on Intelligence Technology, 1, pp.
4-13.
Intelligent and Distributed Solving of Multiphysics Problems Coordinated by Software Agents - An Intelligent Approach for Decentralized
Simulations
207
