
Formal, Model- and Scenario-based Requirement Patterns
Markus Fockel, Jörg Holtmann, Thorsten Koch and David Schmelter
Software Engineering Department, Fraunhofer IEM, Paderborn, Germany
Keywords:
Requirement Patterns, Modal Sequence Diagrams, Safety Requirements, Real-time Requirements.
Abstract:
Distributed, software-intensive systems such as automotive electronic control units have to handle various
situations employing message-based coordination. The growing complexity of such systems results in an
increasing difficulty to achieve a high quality of the systems’ requirements specifications. Scenario-based re-
quirements engineering addresses the message-based coordination of such systems and enables, if underpinned
with formal modeling languages, automatic analyses for ensuring the quality of requirements specifications.
However, formal requirements modeling languages require high expertise of the requirements engineers and
many manual iterations until specifications reach high quality. Patterns provide a constructive means for as-
sembling high-quality solutions by applying reusable and established building blocks. Thus, they also gained
momentum in requirements documentation. In order to support the requirements engineers in the systematic
conception of formal, scenario-based requirements specification models, we hence introduce in this paper a
requirement pattern catalog for a requirements modeling language. We illustrate and discuss the application
of the requirement patterns with an example of requirements for an automotive electronic control unit.
1 INTRODUCTION
Distributed, software-intensive systems such as elec-
tronic control units within vehicles have to handle
various, often real-time- and safety-critical situations
employing message-based coordination (e.g., via bus
communication). The growing complexity of such
systems also results in an increased size of their re-
quirements specifications. Accompanied by that, a
high quality of such specifications is more difficult to
achieve if the requirements engineers rely on manual
requirements validation techniques. A high quality of
a requirements specification encompasses character-
istics like completeness and consistency (ISO, 2011).
Scenario-based requirements engineering ad-
dresses the message-based coordination of such sys-
tems and enables, if underpinned with formal lan-
guages, automatic requirements validation techniques
for improving the quality of a requirements specifi-
cation. One of such requirements engineering ap-
proaches bases on a recent visual Live Sequence
Chart (Damm and Harel, 2001) variant compliant to
the UML (Object Management Group, 2015), so-
called Modal Sequence Diagrams (MSDs) (Harel and
Maoz, 2008). The formal semantics of this re-
quirements engineering approach enable automatic
requirements validation techniques, like simulation
considering assumptions on the environment (Bren-
ner et al., 2013) and real-time requirements (Bren-
ner et al., 2014), as well as a formal consistency
check based on the technique of controller synthesis
(Greenyer et al., 2013).
However, formal requirements modeling lan-
guages like MSDs require a deep knowledge by the
requirements engineers and typically require many
manual and hence costly iterations until specifications
become complete and consistent. That is, the require-
ments engineers initially conceive a typically under-
specified and inconsistent requirements specification.
Afterward, they iteratively apply the simulation as
well as the consistency check and incrementally im-
prove the underspecified and inconsistent parts of the
specification until a reasonable solution is found.
In order to facilitate and systematize this sophisti-
cated and complicated procedure, we introduce in this
paper a model- and scenario-based pattern catalog for
MSD requirements. The usage of patterns is known
to be constructive thanks to assembling solutions by
means of reusable building blocks that are proven in
practice, so that recurring problems do not need to be
solved over and over again (Alexander et al., 1977).
Thus, patterns also gained momentum in the area
of requirements documentation (e.g., (Chung et al.,
2016)). Our MSD requirement pattern catalog con-
solidates and unifies patterns from three well-known,
practice-oriented pattern catalogs (Dwyer et al., 1999;
Fockel, M., Holtmann, J., Koch, T. and Schmelter, D.
Formal, Model- and Scenario-based Requirement Patterns.
DOI: 10.5220/0006554103110318
In Proceedings of the 6th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2018), pages 311-318
ISBN: 978-989-758-283-7
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
311

Konrad and Cheng, 2005; Bitsch, 2001), covering
the aspects chronological succession, real-time, and
safety, respectively. We illustrate and discuss the ap-
plication of the MSD requirement patterns with exam-
ple requirements for an automotive rear door system.
This paper is structured as follows. In Section 2
we discuss existing research on requirement patterns.
Section 3 contains the basics on Modal Sequence Di-
agrams. In Section 4 we introduce the pattern catalog
and some pattern examples. In Section 5 we discuss
the results, and we conclude in Section 6.
2 RELATED WORK
In this section, we summarize existing research on
pattern- and scenario-based engineering and align our
contributions with this work.
Formal, textual property specification languages
like Computation Tree Logic (CTL) (Emerson and
Clarke, 1982) and Timed CTL (TCTL) (Alur et al.,
1993) are common in model checking and provide
a means to assert the correctness of state-based de-
signs through mathematical reasoning (Baier and Ka-
toen, 2008). Property specification patterns provide
well-established rules that help property specification
language practitioners in creating quality specifica-
tions. Autili et al. present a unified catalog of prop-
erty specification patterns (Autili et al., 2015). They
combine four existing catalogs of qualitative (i.e.,
chronological succession), real-time, and probabilis-
tic patterns. They provide a natural language front-
end to specify properties. With MSDs, we provide
a model- and scenario-based visual language. Au-
tili et al. include probabilistic patterns. As we focus
requirements engineering for message-based commu-
nication of safety-critical, software-intensive systems
that have to meet requirements to 100%, we do not
address such patterns. In contrast, we include safety
requirement patterns (cf. (Bitsch, 2001)) in our cata-
log which Autili et al. do not address.
Konrad and Cheng present a model-based re-
quirement pattern catalog (Konrad and Cheng, 2002).
Their catalog targets embedded systems and utilizes
UML for modeling structural and behavioral require-
ments aspects. The catalog encompasses ten pat-
terns that address typical embedded system use cases,
e.g., for specifying requirements on actuators/sensors
(structural pattern) or on fault handling (behavioral
pattern). Konrad et al. present a second catalog on
object analysis patterns in (Konrad et al., 2004) that
is comprised of seven patterns. This second catalog
is based on (Konrad and Cheng, 2002) and targets the
system analysis phase. Especially, they show how to
apply automatic analysis with a property specification
language and a model checker based on object mod-
els created with these patterns. Konrad et al. provide
patterns for use cases of requirements engineering for
embedded systems. In contrast, our catalog targets
the message-based communication of these systems.
Moreover, they do not address real-time requirements
and analysis techniques.
Requirement boilerplates, e.g., by (Mavin et al.,
2009) and (Pohl and Rupp, 2015), provide patterns
for requirements in controlled natural language. Their
aim is to mitigate ambiguities and make requirements
in natural language more amenable to automation.
For example, Arora et al. present an approach to
check requirements specifications for boilerplate con-
formance using Natural Language Processing (Arora
et al., 2014). In contrast to our pattern catalog, Mavin
et al. as well as Pohl and Rupp address requirements
on a more abstract level, for arbitrary systems.
Scenario-based visual languages related to MSDs
are presented in (Autili et al., 2007) and (Zhang et al.,
2010). With Property Sequence Charts (PSCs), Au-
tili et al. introduce a graphical notation to ease the
specification of properties in, e.g., CTL. Similarly to
MSDs, PSCs extend UML Interactions. Zhang et al.
introduce Timed Property Sequence Charts (TPSCs)
that are a timed extension of PSCs. Looking at the
available language features, (T)PCSs and MSDs are
quite similar. However, (T)PCSs are designed as a vi-
sual notation for property specification languages that
require existing knowledge about the system states,
which is, however, typically not available in early
phases of requirements engineering. MSDs spec-
ify requirements on the message-based communica-
tion of a software system. Knowledge about system
states is assumed to not exist yet and is not required.
Thereby, MSDs enable automatic analysis techniques
in early phases of requirements engineering.
3 MODAL SEQUENCE
DIAGRAMS (MSD)
This section introduces basic concepts of the formal,
model- and scenario-based RE approach based on
Modal Sequence Diagrams (MSDs) (Holtmann et al.,
2016). An MSD requirements specification consists
of a UML class diagram and a set of MSDs. The UML
class diagram is used to define the structure of the sys-
tem under development and its environment. Further-
more, it specifies the possible messages each system
can receive by operations of the defined classes.
Our running example consists of the three classes
ESC, RearDoorSystem, and RearDoorMechanics.
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
312
The RearDoorSystem is the system under develop-
ment. It is an electronic control unit that opens/closes
and locks/unlocks a vehicle’s rear door electronically.
The latter is done by actuating the RearDoorMechan-
ics. In addition, the RearDoorSystem is informed by
the electronic stability control (ESC) whenever the
vehicle starts or stops. The RearDoorSystem needs
this information for safety reasons: the rear door shall
not open while the vehicle is moving. To prevent the
rear door from opening while the vehicle is moving,
the RearDoorSystem shall automatically lock the rear
door as soon as the vehicle starts moving. This au-
tomatic safety locking is detailed in the following re-
quirements:
Requirement 1: Once the ESC informs the Rear-
DoorSystem that the vehicle starts moving, the Rear-
DoorSystem shall eventually lock the RearDoorMe-
chanics before the ESC informs the RearDoorSystem
that the vehicle stopped moving.
Requirement 2: Once the ESC informs the Rear-
DoorSystem that the vehicle starts moving, the Rear-
DoorSystem shall lock the RearDoorMechanics after
at most 3s.
Requirement 3: Once the ESC informs the Rear-
DoorSystem that the vehicle starts moving, the Rear-
DoorSystem may not unlock the RearDoorMechanics
before the ESC informs the RearDoorSystem that the
vehicle stopped moving.
These three requirements on the RearDoorSystem
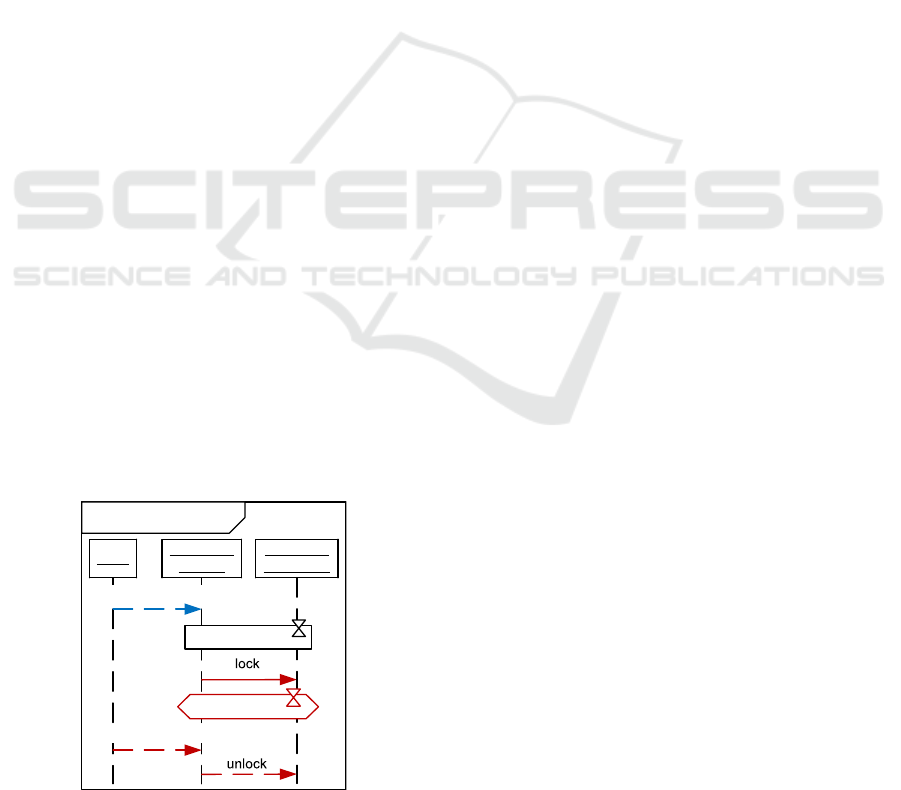
are specified in the MSD in Figure 1. An MSD ba-
sically consists of lifelines and messages. Lifelines
refer to structural entities defined in a UML class dia-
gram. The MSD depicted in Figure 1 encompasses
the three lifelines :ESC, :RearDoorMechanics, and
:RearDoorSystem. Messages, depicted by arrows be-
tween lifelines, define requirements on the commu-
nication between objects. A concrete message ex-
change between two objects (send and receive) is
called message event.
msd Example Scenario
:ESC
:RearDoor
System
vehicleStartsMoving
:RearDoor
Mechanics
vehicleStoppedMoving
c ≤ 3s
(c/m)
(h/e)
(h/m)
(h/m)
(h)
c = 0
Figure 1: Example requirements 1 to 3 in one MSD.
Messages have a temperature and an execution
kind. The temperature of a message can be cold (c)
or hot (h) visualized by blue and red arrows in Fig-
ure 1. A cold message may be sent/received after any
preceding and before any subsequent message of the
same MSD, but it is not required to occur (e.g., ve-
hicleStartsMoving depicted in Figure 1). A hot mes-
sage, on the contrary, has to strictly occur in the order
as specified in the MSD (e.g., vehicleStoppedMoving
depicted in Figure 1). If any other message of the
same MSD occurs when the hot message is expected,
the MSD is violated (i.e., the requirement is not ful-
filled). If any other message of the same MSD oc-
curs when a cold message is expected, the MSD is
terminated/discarded (but the requirement is not vio-
lated). The execution kind of a message can either be
executed (e) or monitored (m) depicted by solid and
dashed arrows in Figure 1, respectively. A monitored
message can be observed during the execution of the
MSD but its occurrence is not required. An executed
message, on the contrary, is required to occur during
the execution of an MSD. If it is not sent/received, the
MSD is violated. In the MSD in Figure 1, the mes-
sage lock is hot and executed to specify the require-
ment that :RearDoorSystem has to send the message
in order to operate safely (cf. Requirement 1 and 2).
We label the messages in our figures accordingly with
(c/m), (c/e), (h/m), and (h/e) for non-color printing.
The MSD Example Scenario contains a clock re-
set and a clock condition to enable the specification of
time dependent communication behavior. A clock re-
set enables requirements engineers to reset the current
value of a clock variable to 0. After a clock reset, the
value of the clock variable will increase with time, in-
dicating the time that passed since the last reset. This
allows requirements engineers to specify relative tim-
ing. Graphically, clock resets are represented by rect-
angular boxes with a solid border and a sketch of an
hourglass in the upper right. The label of a clock re-
set always has the form <Clock Var iable> = 0, where
<Clock Variable> is the name of the clock variable to
reset (e.g., c=0 depicted in Figure 1).
A clock condition enables requirements engineers
to specify that an MSD may only advance under cer-
tain time conditions. Graphically, a clock condi-
tion is represented by a convex hexagon with parallel
opposing edges including an hourglass in the upper
right corner. It contains a textual expression in the
form <Clock Variable> <Relational Operator> <Nat-
ural Number>, where a clock with the name <Clock
Variable> is compared with an integer <Natural Num-
ber> by using an operator <Relational Operator> ∈ {<
, ≤, =, ≥, >} (e.g., c ≤ 3s depicted in Figure 1). Like
messages, clock conditions have a temperature. The
Formal, Model- and Scenario-based Requirement Patterns
313

formula of a clock condition must be a Boolean for-
mula and may refer to any clock variables which are
bound before the evaluation of the clock condition. A
condition is fulfilled if and only if its formula eval-
uates to true. The MSD may only advance past the
condition if it is fulfilled. If the Boolean formula of
a cold clock condition evaluates to false, the MSD is
terminated/discarded. On the contrary, if the Boolean
formula of a hot clock condition evaluates to false, the
MSD only advances if the formula evaluates to true
due to the passing of time. However, if the Boolean
formula can never be fulfilled, the MSD is violated.
4 MSD REQUIREMENT
PATTERNS
Our formal, model- and scenario-based requirement
pattern catalog consists of 86 patterns categorized into
19 classes shown in Table 1. These model-based
patterns are derived from textual patterns that were
identified in requirements specifications from indus-
try (Dwyer et al., 1999; Konrad and Cheng, 2005;
Bitsch, 2001). The column “Src.” in Table 1 de-
notes from which textual catalog the pattern classes
originate. Dwyer et al. (D) defined patterns about the
chronological succession (occurrence and order) of
properties that shall hold (Dwyer et al., 1999), Konrad
and Cheng (K) defined real-time patterns (Konrad and
Cheng, 2005), and Bitsch (B) defined safety patterns
(Bitsch, 2001). The column “RT” denotes whether
a pattern class can be used to specify requirements
with continuous real-time (x) or discrete chronologi-
cal succession (-). The column “S” denotes whether
a pattern class can be used to specify safety require-
ments. The categorization of the pattern classes into
Occurrence and Order follows the structure proposed
in (Dwyer et al., 1999) and (Autili et al., 2015).
The classes 1 to 4 contain requirement patterns
about the occurrence of an event within certain (time)
bounds. The classes 5 to 7 are comprised of patterns
about the occurrence of a condition that shall hold
within certain (time) bounds. The classes 8 and 9
contain patterns about the required absence of events
within certain (time) bounds. Pattern class 10 de-
scribes patterns that combine the occurrence (neces-
sity) and absence (permission) of events within cer-
tain time bounds. The classes 11 to 16 contain re-
quirement patterns about the response to (chains of)
events within certain (time) bounds. The classes 17 to
19 contain patterns about events that are required to
precede (chains of) events within certain bounds.
Dwyer et al. define five scopes to decompose each
pattern class into the same bounds. We adopted these
Table 1: Requirement pattern classes.
Pattern Class Src. RT S #
Occurrence
1. Existence D - x 5
2. Bounded Existence D - - 5
3. Bounded Recurrence K x - 5
4. RT-Safety - Necessary B x x 2
5. Universality D - x 5
6. Minimum Duration K x - 5
7. Maximum Duration K x - 5
8. Absence D - x 5
9. RT-Safety - Permitted B x x 2
10. RT-Safety - Nec.&Perm. B x x 2
Order
11. Response D - x 5
12. Response Chain 1-n D - - 5
13. Response Chain n-1 D - - 5
14. Bounded Response K x x 5
15. Bounded Invariance K x - 5
16. Constrained Chain D - - 5
17. Precedence D - - 5
18. Precedence Chain 1-n D - - 5
19. Precedence Chain n-1 D - - 5
Total: 86
Legend: RT: Real-Time; S: Safety;
D: Dwyer et al.; K: Konrad and Cheng; B: Bitsch
scopes. For example for the existence class, an event
shall occur globally, before an event q, after an event
q, between two events q and r, or after an event q until
an event r occurs. Konrad and Cheng use the same
five scopes for the pattern classes they define. Bitsch
uses four different scopes to specify that within cer-
tain (time) bounds a proposition is necessary, under
certain conditions necessary (conditional guarantee),
permitted, or necessary & permitted to hold. He de-
fines 52 patterns in total. All of his pattern classes
not listed in Table 1 are instances of (a combination
of) the other patterns (which is denoted by an x in the
“S” column in Table 1 and shown in (Fockel et al.,
2017), see also Section 5). We combined all pattern
classes and scopes such that our catalog contains 86
distinct patterns.
Dwyer et al., Konrad and Cheng, and Bitsch spec-
ified their patterns in formal, textual property spec-
ification languages like CTL (Emerson and Clarke,
1982) and TCTL (Alur et al., 1993), common in
model checking (Baier and Katoen, 2008). We
use the formal, model- and scenario-based require-
ments specification language Modal Sequence Dia-
grams (Holtmann et al., 2016). In the following, we
explain two model-based requirement patterns. The
complete catalog can be found in our technical report
(Fockel et al., 2017). For each pattern, we provide
its MSD representation, a Büchi automaton (Büchi,
1966), and the pattern’s application to the rear door
system example (Requirement 2 and Requirement 3).
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
314
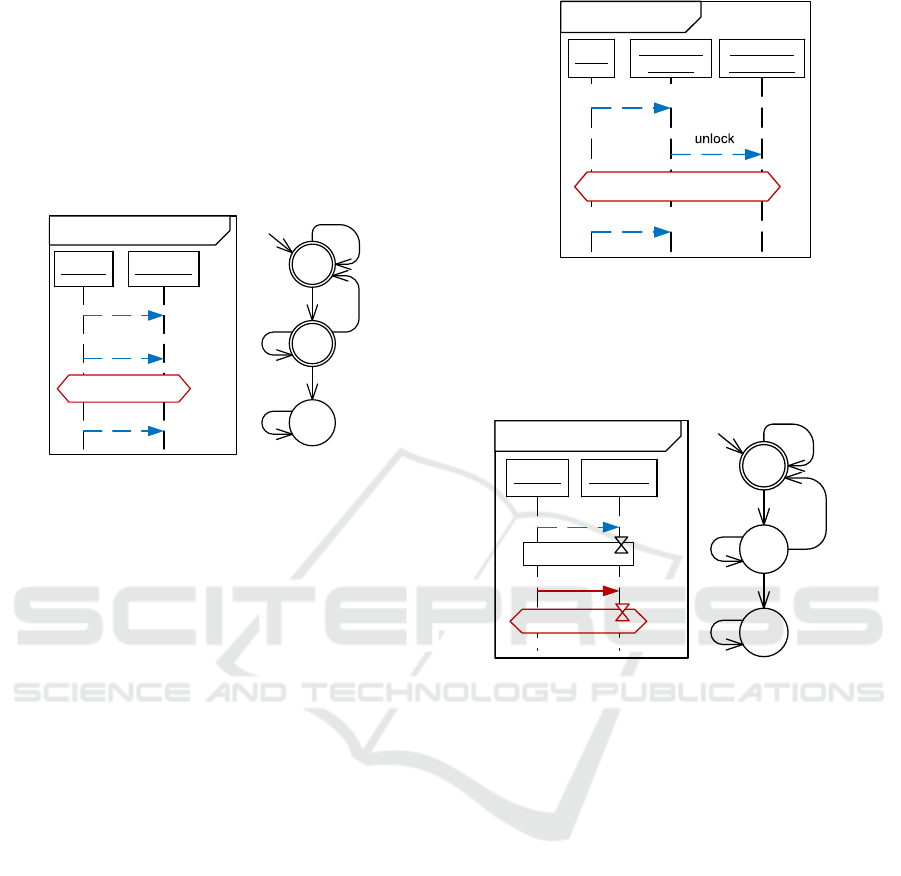
Absence Pattern. The MSD in Figure 2 specifies
the chronological succession requirement pattern Ab-
sence (After q until r) in model-based form. The right
of the figure shows its representation as Büchi au-
tomaton. The transitions represent events (i.e., the
execution of messages) and the states denote the pos-
sible MSD execution states between events. s0 is the
start state before the initial event q of the MSD. Σ de-
notes the set of all possible events.
msd Absence - After q until r
q
p
false
r
:Sender :Recipient
(c/m)
(c/m)
(c/m)
(h)
Σ \ {p,r}
r
p
f
s0
q
Σ \ {q}
s1
Σ
Figure 2: Absence (After q until r) pattern.
The pattern specifies that if the event q occurs, the
event p may not occur until the event r occurred. The
initial message q in the MSD denotes the if-condition.
If q is followed by the event p, the execution of the
MSD ends in the hot condition false. It always eval-
uates to false and produces a violation that cannot be
avoided by any further event (non-accepting state f in
Figure 2 cannot be left). In this case, the requirement
specified by this MSD is not fulfilled because p oc-
curred after q and before r. The position of the hot
condition false also prevents that the message r speci-
fied below will ever be reached. That message is only
part of this MSD to force a discarding of the MSD if
the event r occurs before p (in state s1). In that case,
the requirement is fulfilled because p did not occur
before r. All messages in the pattern are monitored
because they are not required to occur. We only argue
about the absence of events. In addition, all messages
are cold because we do not require a certain order of
occurrence, we forbid one order by the hot false con-
dition. For instance, the event q may be repeated ar-
bitrarily often before r (self-transition on state s1).
The MSD in Figure 3 shows the application of the
pattern to specify Requirement 3 introduced in Sec-
tion 3. The rear door shall not be unlocked while
the vehicle is moving. Thus, the message unlock may
not be sent after the message vehicleStartsMoving un-
til the message vehicleStoppedMoving is received.
Bounded Response Pattern. The MSD in Figure 4
specifies the real-time requirement pattern Bounded
Response (Globally) in model-based form. The pat-
msd Requirement 3
vehicleStartsMoving
vehicleStoppedMoving
false
:ESC
:RearDoor
System
:RearDoor
Mechanics
(c/m)
(c/m)
(c/m)
(h)
Figure 3: Absence pattern applied to example.
tern is also part of the safety patterns of Bitsch. Thus,
the x in Table 1 in the safety column of this pattern.
The pattern specifies that if the event p occurs, the
event s has to occur within k time units.
:Sender :Recipient
msd Bounded Resp. - Glob.
s
p
c ≤ k
(c/m)
(h/e)
(h)
c = 0
Σ \ {p,s}
{p, s [c>k]}
f
s0
p / c=0
Σ \ {p}
s1
s [c≤k]
Σ
Figure 4: Bounded response (Globally) pattern.
The initial message p in the MSD denotes the if-
condition. It is directly followed by a clock reset that
resets the clock c to 0. The executed message s de-
notes that s has to eventually occur. Thus, the state s1
is non-accepting and needs to be left. The message
is also hot, so it has to occur before the following
clock condition. That hot clock condition specifies
that once it is reached, the clock c has to have a value
lower or equal to k (i.e. s1 has to be left via the tran-
sition s [c≤k]). If this is not possible, s occurred too
late and the requirement is violated. In this case, the
Büchi automaton stays in one of the non-accepting
states s1 or f.
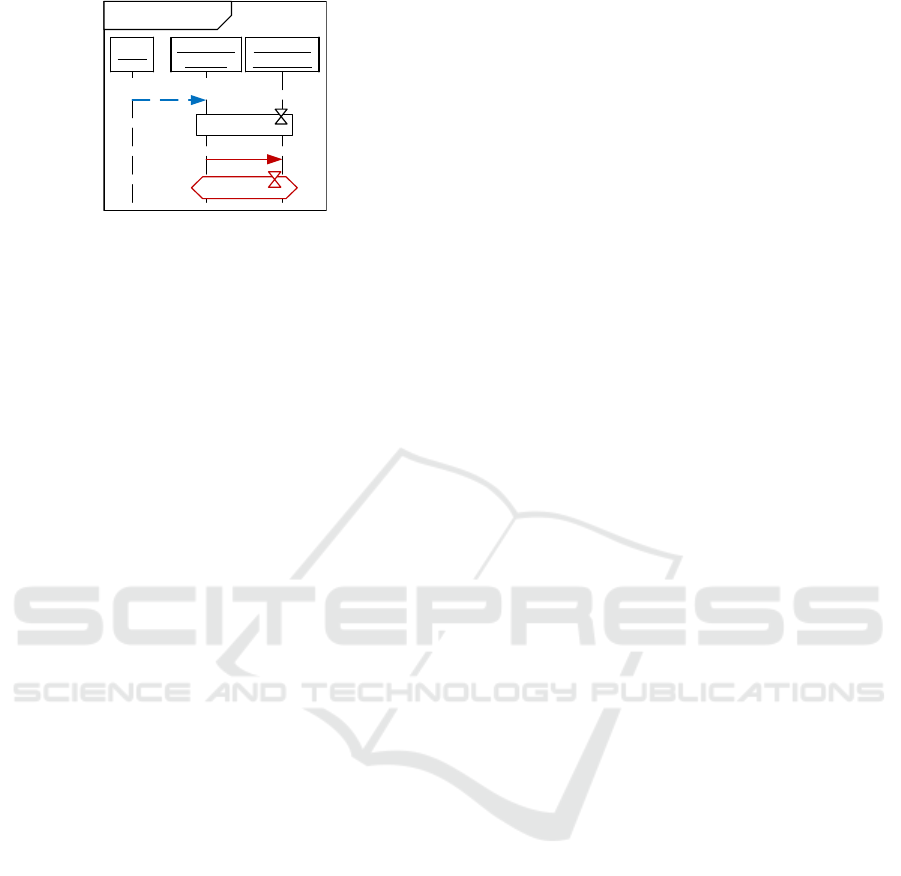
The MSD in Figure 5 shows the application of the
pattern to specify Requirement 2 introduced in Sec-
tion 3. The rear door shall be locked once the vehicle
starts moving. Thus, the message lock shall be sent
within 3 seconds after vehicleStartsMoving.
Formal, Model- and Scenario-based Requirement Patterns
315
:ESC
:RearDoor
System
msd Requirement 2
lock
vehicleStartsMoving
:RearDoor
Mechanics
c ≤ 3s
(c/m)
(h/e)
(h)
c = 0
Figure 5: Bounded response pattern applied to example.
5 DISCUSSION
In this paper, we present a formal, model- and
scenario-based requirement pattern catalog. It is
based on three existing catalogs of patterns about
chronological succession (Dwyer et al., 1999), real-
time (Konrad and Cheng, 2005), and safety (Bitsch,
2001). The authors of those catalogs provide patterns
for property specification languages like CTL and
TCTL. The focus of these languages is on checking
the correctness of an existing software. They specify
state-based requirements using conditions. For exam-
ple, “After being in a state where condition c holds,
the system shall enter a state where condition d holds
until condition e holds”. This requires existing knowl-
edge of possible system states, or a state-based design
model has to be defined alongside the requirements.
In contrast, the focus of MSDs lies on re-
quirements on message-based communication, i.e.,
requirements on message events that occur at
simulation- or run-time (cf. Section 3). Such a re-
quirement has the form “Once the event q occurs, the
system shall trigger event p before event r occurs”.
Knowledge about internal system states is assumed to
not yet exist and is not required. Furthermore, MSDs
organize requirements in sets of use cases of the sys-
tem to be developed. It would be challenging to define
system states valid for all scenarios during the early
development phase of requirements specification.
Nevertheless, we base our work on the existing,
well-known pattern catalogs for two reasons: Firstly,
Dwyer et al. suggested that their state-condition-
based formulas can be translated into event-based for-
mulas by using two events for specifying that a condi-
tion starts or stops to hold (Dwyer et al., 1999). Sec-
ondly, the two catalogs (Dwyer et al., 1999) and (Kon-
rad and Cheng, 2005) have been translated into visual
notations before, to provide a more intuitive specifi-
cation means (Autili et al., 2007; Zhang et al., 2010).
In the following, we discuss our findings from
translating the three pattern catalogs into the MSD re-
quirements language (Holtmann et al., 2016).
Each MSD Defines its Own Clocks. The seman-
tics of timed MSDs (Brenner et al., 2014) specify that
clocks only exist within the scope of a single MSD
(cf. clock c in Figure 4). Thus, the clock variable of
one MSD cannot be used in clock conditions of other
MSDs. Hence, a requirement pattern that consists of
a cascade of MSDs and reasons about one time inter-
val from beginning to end, cannot be specified using
a single clock variable.
Fortunately, it is possible to specify all real-time
patterns (from (Konrad and Cheng, 2005) and (Bitsch,
2001)) by MSDs. In four cases we use time triggered
messages (i.e., events that are enforced after a clock
condition evaluates to true) to join cascading MSDs.
In future work, MSD semantics could be extended to
allow global clocks that span multiple MSDs.
Each MSD Has to Start with an Initial Message:
The semantics of MSDs specify that the execution of
an MSD is triggered by an event that is listened for by
the first message (that is always cold and monitored)
of the MSD. Thus, MSDs always represent if-then re-
quirements: if the initial message/event occurs, then
the succeeding part of the MSD shall (not) occur.
For the before-scope requirement patterns, this
means that we have to add an event that represents
the start of the system: “If the system starts, then the
system shall... before the event q occurs”. However,
we argue this is viable because a software-intensive
system always has to be started somehow (e.g., by a
vehicle’s ignition or a power button).
Strictness Requirements (Hot Messages) Forbid
Event Recurrences: If an MSD contains a hot mes-
sage, no other message of that MSD may occur when
the hot message is anticipated. For example, in Fig-
ure 1, neither the message vehicleStartsMoving before
the hot message lock nor vehicleStoppedMoving and
unlock after it are allowed to occur when lock is an-
ticipated. The state-condition-based property specifi-
cation patterns typically reason about conditions. For
example, “After condition c holds, condition d has to
eventually hold afterward”. They do not consider how
long c holds or if it is interrupted for a while until d
eventually holds.
We adapted the patterns to the event-based formal-
ism. For example, “After the event q occurs, the event
p has to eventually occur”. Intuitively, one might in-
terpret this requirement such that p has to occur af-
ter every q. However, the original property specifica-
tion pattern would allow the event q to recur multiple
times before p has to eventually occur (the condition
c may be interrupted). If we obey the formal pattern
interpretation, most requirement patterns require mul-
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
316

tiple MSDs to avoid unwanted dependencies between
events (cf. (Fockel et al., 2017)). If we make the
intuitive assumption (and state it explicitly), the pat-
terns can be applied in simpler form leading to con-
densed MSDs (e.g., Figure 1). Both interpretations
can be expressed with MSDs. The separate MSDs for
the formal interpretation decompose each pattern into
reduced subrequirements that fulfill the singularity
quality characteristic imposed by ISO 29148: “The
requirement statement includes only one requirement
with no use of conjunctions.” (ISO, 2011). For exam-
ple, the existence pattern (used for Requirement 1) is
decomposed into two MSDs.
MSD Patterns are Closer to their Realization
than Property Specification Patterns: The prop-
erty specification patterns specify conditions that
shall hold for certain states of a system. Thus, it is
assumed that a state-based design model of the sys-
tem exists, which can be directly verified against test
requirements specified through the property specifi-
cation patterns (e.g., by model checking). MSDs are
used to specify requirements on the communication
of systems and do not require an existing state-based
design model. They describe scenario-based require-
ments that a system to be developed shall fulfill.
We argue that MSD requirements better serve
the purpose of finding a possible realization than re-
quirements formulated in a property specification lan-
guage. In conclusion, MSD requirement patterns sup-
port the ISO 29148 requirement quality characteris-
tics feasibility and verifiability (i.e., testability).
Bitsch’s Safety Patterns are Instances of (Combi-
nations of) the Chronological Succession and Real-
time Patterns: When translating the safety patterns
(Bitsch, 2001) into MSDs, we discovered that most
of them can be expressed using the same MSDs as
we used for the chronological succession patterns and
real-time patterns (Dwyer et al., 1999; Konrad and
Cheng, 2005). The bounded response pattern (cf. Fig-
ure 4) is an example that is contained in the real-time
pattern catalog and the safety pattern catalog. We
denote these mapping relations in the safety column
(S) of Table 1. The concrete instance-of-mapping for
each safety pattern is contained in our technical report
(Fockel et al., 2017).
There are three pattern classes, namely RT-Safety
- Necessary, RT-Safety - Permitted, and RT-Safety -
Necessary & Permitted that could not be specified
as instances of patterns of the other catalogs. We
list these separately in Table 1. The first two pat-
tern classes were defined as new (non-safety) pat-
terns called Time-constrained existence and Time-
constrained absence independently from Bitsch by
Autili et al. (Autili et al., 2015). The third pattern
class is the combination of the first two.
Summary: In summary, we showed that MSDs can
be used to specify chronological succession, real-
time, and safety requirement patterns. However, their
semantics also can hinder the intuitive specification
of requirements (e.g., concerning clocks, initial mes-
sages, and strictness). On the contrary, the strict
and constructive use of the requirement patterns fos-
ters requirements specification quality by support-
ing the ISO 29148 requirement quality characteris-
tics singularity, feasibility, and verifiability. In addi-
tion, the support for automatic requirements verifica-
tion (Greenyer et al., 2013) fosters the requirement
quality characteristic consistency. Furthermore, the
support for requirements simulation (Brenner et al.,
2013; Brenner et al., 2014) helps to identify miss-
ing requirements and assumptions to facilitate the re-
quirement quality characteristic completeness. More-
over, Bitsch suggests to use Life Sequence Charts or
similar languages for complex requirement patterns:
“The practical benefit of this kind of approaches is
obvious but the correct use of these notations still
have to be learned” (Bitsch, 2001). We argue that the
use of our pattern catalog for MSDs (which are based
on Life Sequence Charts) facilitates the learning pro-
cess. In addition, the transition and traceability to the
model-based design is easier if requirements are also
specified in a model-based way.
6 CONCLUSIONS
In this paper, we introduced a model- and scenario-
based pattern catalog that is tailored to the MSD re-
quirements specification language (Harel and Maoz,
2008; Holtmann et al., 2016). The requirement pat-
tern catalog consolidates and unifies requirement pat-
terns from three well-known requirement pattern cat-
alogs (Dwyer et al., 1999; Konrad and Cheng, 2005;
Bitsch, 2001) that cover the aspects chronological
succession, real-time, and safety, respectively. We il-
lustrated and discussed the application of the MSD re-
quirement patterns by means of an automotive exam-
ple, whereas we present the full catalog encompassing
altogether 86 patterns in (Fockel et al., 2017).
The requirement patterns facilitate and system-
atize the conception of complete and consistent MSD
specifications. Moreover, our requirement pattern cat-
alog is practice-oriented due to the fact that the three
underlying requirement pattern catalogs were ex-
tracted from real-world requirements specifications.
Formal, Model- and Scenario-based Requirement Patterns
317

In contrast to the three underlying catalogs that apply
derivatives of property specification languages (Baier
and Katoen, 2008) that are difficult to apply correctly
(Autili et al., 2007) and require a state-based design
model, our pattern catalog bases on the visual notion
of MSDs that can be directly simulated and formally
checked for consistency already at requirements level.
In future work we plan to evaluate our formal,
model- and scenario-based requirement pattern cat-
alog by applying it in further industry case studies.
Furthermore, we want to extend the catalog by fur-
ther types of patterns like security requirement pat-
terns (Spanoudakis et al., 2007).
REFERENCES
Alexander, C., Ishikawa, S., and Silverstein, M. (1977). A
Pattern Language, volume 2 of Center for Environ-
mental Structures Series. Oxford University Press.
Alur, R., Courcoubetis, C., and Dill, D. (1993). Model-
checking in dense real-time. Information and Compu-
tation, 104(1):2 – 34.
Arora, C., Sabetzadeh, M., Briand, L. C., and Zimmer, F.
(2014). Requirement boilerplates: Transition from
manually-enforced to automatically-verifiable natural
language patterns. In 4
th
Int. Workshop on Require-
ments Patterns (RePa 2014).
Autili, M., Grunske, L., Lumpe, M., Pelliccione, P., and
Tang, A. (2015). Aligning qualitative, real-time, and
probabilistic property specification patterns using a
structured english grammar. IEEE Transactions on
Software Engineering, 41(7):620–638.
Autili, M., Inverardi, P., and Pelliccione, P. (2007). Graph-
ical scenarios for specifying temporal properties: an
automated approach. Automated Software Engineer-
ing, 14(3):293–340.
Baier, C. and Katoen, J.-P. (2008). Principles of Model
Checking. MIT Press.
Büchi, J. R. (1966). Symposium on decision problems:
On a decision method in restricted second order arith-
metic. Studies in Logic and the Foundations of Math-
ematics, 44:1–11.
Bitsch, F. (2001). Safety patterns – the key to formal specifi-
cation of safety requirements. In 20
th
Int. Conference
on Computer Safety, Reliability and Security (SAFE-
COMP 2001), pages 176–189.
Brenner, C., Greenyer, J., Holtmann, J., Liebel, G.,
Stieglbauer, G., and Tichy, M. (2014). Scenari-
oTools real-time play-out for test sequence validation
in an automotive case study. In 13
th
Int. Workshop
on Graph Transformation and Visual Modeling Tech-
niques (GT-VMT 2014).
Brenner, C., Greenyer, J., and Panzica La Manna, V. (2013).
The ScenarioTools play-out of modal sequence dia-
gram specifications with environment assumptions. In
12
th
Int. Workshop on Graph Transformation and Vi-
sual Modeling Techniques (GT-VMT 2013).
Chung, L., Kopczy
´
nska, S., Leite, J. C. S. d. P., Supakkul,
S., and Zhao, L. (2016). Welcome to the 6
th
int. work-
shop on requirements patterns (RePa). In 2016 IEEE
24
th
Int. Requirements Engineering Conf. Workshops
(REW), pages 276–277.
Damm, W. and Harel, D. (2001). LSCs: Breathing life into
message sequence charts. Formal Methods in System
Design, 19:45–80.
Dwyer, M. B., Avrunin, G. S., and Corbett, J. C. (1999).
Patterns in property specifications for finite-state ver-
ification. In 1999 Int. Conference on Software Engi-
neering (ICSE 99), pages 411–420.
Emerson, E. A. and Clarke, E. M. (1982). Using branch-
ing time temporal logic to synthesize synchroniza-
tion skeletons. Science of Computer Programming,
2(3):241–266.
Fockel, M., Holtmann, J., Koch, T., and Schmelter,
D. (2017). Model-based requirement pattern cata-
log. Technical Report tr-ri-17-354, Fraunhofer IEM
/ Heinz Nixdorf Institute.
Greenyer, J., Brenner, C., Cordy, M., Heymans, P., and
Gressi, E. (2013). Incrementally synthesizing con-
trollers from scenario-based product line specifica-
tions. In ESEC/FSE, pages 433–443. ACM.
Harel, D. and Maoz, S. (2008). Assert and negate revis-
ited: Modal semantics for UML sequence diagrams.
Software & Systems Modeling, 7(2):237–252.
Holtmann, J., Fockel, M., Koch, T., Schmelter, D., Bren-
ner, C., Bernijazov, R., and Sander, M. (2016).
The MechatronicUML Requirements Engineering
Method: Process and Language. Technical Report tr-
ri-16-351, Fraunhofer IEM / Heinz Nixdorf Institute.
ISO (2011). ISO 29148:2011: Systems and software en-
gineering – life cycle processes – requirements engi-
neering.
Konrad, S. and Cheng, B. H. C. (2002). Requirements pat-
terns for embedded systems. In IEEE Joint Int. Con-
ference on Requirements Engineering.
Konrad, S. and Cheng, B. H. C. (2005). Real-time speci-
fication patterns. In 27
th
Int. Conference on Software
Engineering (ICSE 2005), page 372.
Konrad, S., Cheng, B. H. C., and Campbell, L. A. (2004).
Object analysis patterns for embedded systems. IEEE
Transactions on Software Engineering, 30(12):970–
992.
Mavin, A., Wilkinson, P., Harwood, A., and Novak,
M. (2009). Easy approach to requirements syntax
(EARS). In 17
th
IEEE Int. Requirements Engineering
Conference (RE 2009), pages 317–322.
Object Management Group (2015). OMG Unified Model-
ing Language (OMG UML), version 2.5.
Pohl, K. and Rupp, C. (2015). Requirements Engineering
Fundamentals. Rocky Nook, Inc.
Spanoudakis, G., Kloukinas, C., and Androutsopoulos, K.
(2007). Towards security monitoring patterns. In
2007 ACM Symposium on Applied Computing (SAC
07), pages 1518–1525. ACM.
Zhang, P., Li, B., and Grunske, L. (2010). Timed prop-
erty sequence chart. Journal of Systems and Software,
83(3):371–390.
MODELSWARD 2018 - 6th International Conference on Model-Driven Engineering and Software Development
318
