
Reasoning for Autonomous Agents in Dynamic Domains
Stephan Opfer, Stefan Jakob and Kurt Geihs
Distributed Systems Research Group, University of Kassel, Wilhelmsh
¨
oher Allee 73, Kassel, Germany
Keywords:
Answer Set Programming, Region Connection Calculus, Spatial Reasoning, Multi-shot Solving.
Abstract:
In contrast to simple autonomous vacuum cleaners, multi-purpose robots that fetch a cup of coffee and clean
up rooms require cognitive skills such as learning, planning, and reasoning. Especially reasoning in dynamic
and human populated environments demands for novel approaches that can handle comprehensive and fluent
knowledge bases. A promising approach is Answer Set Programming (ASP), offering multi-shot solving
techniques and non-monotonic stable model semantics. Our objective is to equip multi-agent systems with
ASP-based reasoning capabilities, enabling a team of robots to cope with dynamic environments. Therefore,
we combined ALICA - A Language for Interactive Cooperative Agents - with the ASP solver Clingo and
chose topological path planning as our evaluation scenario. We utilised the Region Connection Calculus as
underlying formalism of our evaluation and investigated the scalability of our implementation. The results
show that our approach handles dynamic environments and scales up to appropriately large problem sizes.
1 INTRODUCTION
During the last decade autonomous robots started to
play an increasingly important role in our everyday
life. They are able to vacuum-clean our living room,
mow the lawn, and clean the pool. Almost all car
manufacturers are developing autonomous cars. Au-
tomated guided vehicles take care of the logistics in
production plants or parcel service centres. Autono-
mous and interactive toys become more and more in-
telligent.
Figure 1: Domestic Service Robot PR2. (Wang, 2010).
In the research field of service robots, researchers
focus on multi-purpose robots, instead of single-
purpose ones. Figure 1 shows a state-of-the-art ser-
vice robot, which can do everyday household tasks.
The variety of those tasks tremendously increases the
number of elements relevant for the robot’s environ-
mental representation and therefore, poses new chal-
lenges to the research community. Operating in hu-
man populated environments, e.g., requires the robot
to handle dynamic environments. This is, because hu-
man beings insert, remove, and displace objects in
the environment and are themselves moving obsta-
cles from the robot’s point of view. In order to cope
with this problem, the robot needs cognitive capabili-
ties such as learning, planning, and reasoning. Furt-
hermore, a suitable level of abstraction is necessary
to make reasoning about such complex and dynamic
domains more tractable. A robot that should fetch a
cup, for example, needs to know that a cup is usu-
ally situated in a cupboard in the kitchen, but does
not have to know the cup’s exact coordinates. Furt-
hermore, it needs to reason about the reachability of
the cup from its current position in the building, ta-
king locked doors, obstacles, and the topology of the
building into account.
A common way of tackling such problems is the
symbolic knowledge representation and reasoning ap-
proach (Brachman and Levesque, 2003). Neverthe-
less, our experience is that most benchmarks present
today
1
are designed in a one-shot fashion, i.d., con-
tinuously solving one problem after another, without
1
http://www.satcompetition.org/ [Online; accessed De-
cember 9, 2016]
http://aspcomp2015.dibris.unige.it/ [Online; accessed De-
cember 9, 2016]
340
Opfer S., Jakob S. and Geihs K.
Reasoning for Autonomous Agents in Dynamic Domains.
DOI: 10.5220/0006297603400351
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 340-351
ISBN: 978-989-758-220-2
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
the possibility of using knowledge from previous pro-
blems. Our contribution is to enable multi-agent sys-
tems to continuously reason about dynamic environ-
ments by utilizing Answer Set Programming (ASP) –
a non-monotonic knowledge representation and rea-
soning formalism (Gebser et al., 2014), suitable for
multi-shot solving (Gebser et al., 2015). Further-
more, such dynamic environments demand a highly
dynamic multi-agent coordination framework that in
our case is provided by ALICA – A Language for
Interactive Cooperative Agents (Skubch, 2013). In
our preliminary work (Opfer et al., 2016) we cap-
tured the semantics of ALICA programs within an
ASP logic program, in order to detect common mo-
delling errors. This forms the basis for integrating
ASP with ALICA and allows us to extend it with a ge-
neral solver interface. Through this interface ALICA
programs can utilise ASP-based reasoning techniques
which in turn makes ALICA open for a wider set of
application domains. Moreover, we had to extend
the utilised ASP solver with query semantics accor-
ding to (Gelfond and Kahl, 2014). In our evalua-
tion, we chose topological path planning as our sce-
nario. Therefore, we formulated a simplified version
of the common Region Connection Calculus (Randell
et al., 1992) in ASP, further denoted as RCC-4, and
investigated the scalability of our RCC-4 formalisa-
tion in combination with our integration of ASP with
ALICA.
The remainder of this paper is structured as fol-
lows. Section 2 introduces ALICA, ASP, and RCC-4.
The integration of ALICA with ASP is described in
Section 3. Furthermore, the query semantics exten-
sion is elaborated in Section 4. Section 5 provides the
description of our evaluation scenario, whose results
are presented in Section 6. Finally, we compare our
work with other approaches in Section 7 and conclude
with Section 8.
2 FOUNDATIONS
This section is divided into three subsections. In Sub-
section 2.1 the focus is set on concepts of ALICA
that are necessary to understand in the context of this
work. The same holds for Subsection 2.2 that is about
the syntax and semantics of ASP. In Subsection 2.3 an
explanation of the basic relations of the Region Con-
nection Calculus 4 is given.
2.1 ALICA
The ALICA framework is designed to coordinate a
cooperative team of autonomous agents. Explaining
all features of this framework is beyond the scope of
this work and we would like to point the interested re-
ader to the dissertation of Hendrik Skubch (Skubch,
2013) and two supplementary publications (Skubch
et al., 2011a; Skubch et al., 2011b). In this section,
our goal is to explain the fundamental principles of
ALICA and focus on the parts that we changed to
make a wider set of general problem solvers acces-
sible from within an ALICA program.
The ALICA framework is distributed in the sense
that each agent in the team is running its own inde-
pendent ALICA behaviour engine. Each behaviour
engine determines the sequence of actions of the lo-
cal agent while coordinating with other engines and
taking the current situation as well as a given ALICA
program into account. Sometimes frameworks like
ALICA are also denoted as sequencer (Gat, 1998).
Clean Up
Pre: messy, Run: >
Tidy Up
1..∞
Z
0
Z
1
Z
2
Z
3
Z
4
Drive
Pick Up
Transport
Place Back
Post: in place
arrived
picked ∧ near dest.
dropped
picked
near dest.
dropped
placed
Inspect
1..2
Z
4
Z
5
Search
Identify
found
identified ∧ notified
Wipe Floor
0..2
Z
6
Z
7
Z
8
Drive
Wipe
Dry
arrived all wet
dried
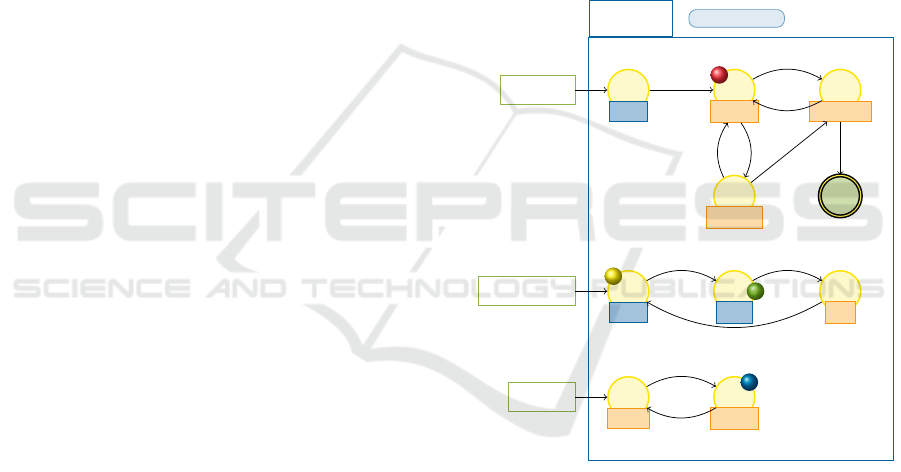
Figure 2: Simple Clean Up Plan.
An ALICA program is a special tree, whose in-
terior nodes are plans and its leaf nodes are atomic
behaviours. The CleanUp plan in Figure 2 is an ex-
ample of such an interior node. A plan can include
several states (Z
0
. . . Z
8
) that are connected with guar-
ded transitions to create finite state machines (FSM).
Each FSM is annotated with a task (Tidy Up, Wipe
Floor, Inspect) and a pair of cardinalities for the mini-
mum and maximum number of agents allowed in the
corresponding FSM. Each state of a plan, except for
terminal states (Z
4
), can contain behaviours and plans
that represent leaf or interior nodes respectively on
the next level of the tree. In Figure 2 plans and beha-
viours are distinguished by the colour of their boxes,
e.g., state Z
0
contains the plan Drive, which is blue,
Reasoning for Autonomous Agents in Dynamic Domains
341
and state Z
1
contains the behaviour Pick Up, which is
orange. It is important to note that a plan, which is
referenced in a state, is a complete plan like the Clean
Up plan itself and therefore can include state machi-
nes with other behaviours and plans.
The coloured circles on top of some states in Fi-
gure 2 illustrate a possible global execution state of
the plan. Each circle represents an agent. The red ci-
rcle, for example, could be the local agent executing
the Pick Up behaviour, while the other circles repre-
sent other agents in the team, whose corresponding
behaviour engine have sent their execution state to the
local agent.
In order to understand the extension of ALICA by
a general problem solver interface, it is necessary to
introduce the notion of ALICA plan variables. For
simplicity let us modify the Inspect state machine
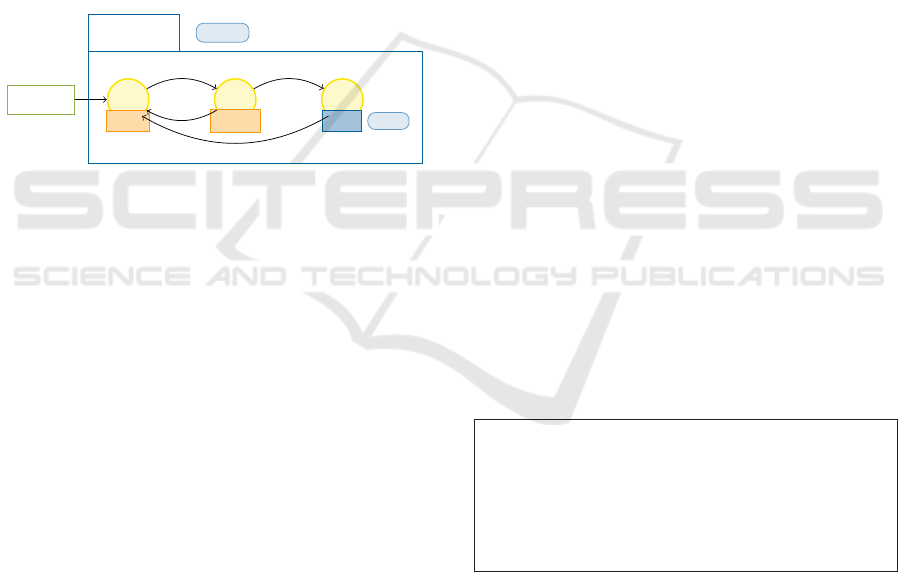
from Figure 2 to create a plan on its own.
Inspection
Var: X
Inspect
0..1
Z
4
Z
5
Z
9
Search
Classify
Clean
Var: X
0
found
in use
identified
done
Figure 3: Inspection Plan.
The purpose of this plan, as shown in Figure 3,
could be the identification of coffee cups that should
be cleaned, because they are dirty and not used any-
more. Therefore, an agent searches for coffee cups in
state Z
4
and switches to state Z
5
, in order to classify
them. For remembering which cup was found in state
Z
4
the plan variable X can be set to the corresponding
cup and thereby influence the agent’s behaviour du-
ring the rest of the plan execution. This influence can
even reach to deeper levels of the plan tree, as indica-
ted by variable X
0
of the Clean plan in state Z
9
. It is
possible to define variable bindings over states in an
ALICA plan tree, e.g., stating that X denotes the same
variable as X
0
. This allows to determine the agent’s
behaviour in the Clean plan, depending on which cup
was found in the Inspection plan.
ALICA as presented in (Skubch, 2013) only pro-
vided one solver for assigning values to plan vari-
ables. The given solver addresses non-linear conti-
nuous constraint satisfaction problems and, as it was
hardwired to ALICA, the applicability of ALICA for
other domains was limited. Our extension of ALICA
with a general solver interface tackles this issue (see
Section 3).
2.2 Answer Set Programming
Answer Set Programming (ASP) is a declarative ap-
proach for solving NP-search problems. It can be
seen as the result of decades of research in the areas
of knowledge representation, logic programming, and
constraint satisfaction. Thereby, its focus is on ex-
pressivity, ease of use, and computational effective-
ness (Brewka et al., 2011). An ASP program is spe-
cified by a set of rules of the form a
0
← a
1
∧ . . . ∧
a
m
∧ ∼ a
m+1
∧ . . . ∧ ∼ a
n
. Each a
i
denotes a predicate
p(t
1
, . . . , t
k
) with terms t
1
, . . . , t
k
build from constants,
variables, and functions. Rules consist of three parts,
namely the head a
0
, the positive part a
1
∧ . . . ∧ a
m
and the negative part ∼ a
m+1
∧ . . . ∧ ∼ a
n
of the body.
The semantics of the default negation ∼ is that of
negation-as-failure. That means, ∼ a
i
is considered
to hold, if it fails to prove that a
i
holds. Neverthe-
less, ASP also provides classic negation ¬a
i
, whose
semantics is that ¬a
i
holds, if a
i
does not.
In order to create ASP programs, the rules have to
be transformed in the following way: ← is transfor-
med to :-, ∧ are replaced by , and a rule is ended by
a dot. The - in front of robot(X) stands for classic
negation ¬ and not in front to of broken(X) means
default negation ∼. The ; is a syntactic shortcut for
creating several rules at once. Rule 1, therefore, crea-
tes robot(chuck), robot(fox), and robot(lisa).
Furthermore, Rules 1 and 2 have an empty body. So
their heads are unconditionally true, and they are de-
noted as facts. Rule 3 makes use of the default nega-
tion ∼ and states that a robot can drive, as long as it
cannot be proven, that it is broken (not broken(X)).
Here X is a variable (starts with uppercase letter),
which can be substituted with any element of the Her-
brand universe of the given program.
1 r o b o t ( chuc k ; f o x ; l i s a ) .
2 b r ok e n ( fo x ) .
3 c a n D r i ve (X) :− r o b o t (X) , n o t b r o ke n (X) .
4 h i g h F a i l u r e R a t e :− Working
= # c o u n t {X : c a n D r i ve (X) } ,
Bro ken = # c o u n t {X : b r ok e n (X) } ,
Working < B roke n .
Listing 1: Robots can drive, as long as they are not broken.
The Herbrand universe of the program in Listing 2.2
only contains four constants (start with lower-case let-
ter): {chuck, fox, lisa, highFailureRate}. Rule
4 derives the constant highFailureRate, if there are
more broken robots than driving ones. As shown by
this rule, ASP is capable of handling integers and
provides aggregate functions like #count or #sum
and arithmetic functions like < or +. The result of
this program will state, that there are three robots
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
342
of whom chuck and lisa can drive, the constant
highFailureRate does not occur.
State-of-the-art ASP solvers (Gebser et al., 2014;
Leone et al., 2006) usually work in two steps. First
they ground the program and afterwards determine
all stable models of the grounded program. A pro-
gram, as well as every part of it, is grounded if it does
not contain any variable. In order to create a groun-
ded program, informally speaking, the variables of
each rule are replaced by each possible substitution
with an element of the program’s Herbrand universe.
The Herbrand universe of a program is constructed
from all constants and functions occurring in the pro-
gram. Grounding a program that way would increase
the number of rules enormously, therefore the utilised
grounding algorithms try to keep the grounded pro-
gram as small as possible, without altering the pro-
grams meaning. For example, Rule 3 of Listing 2.2
will not be part of the grounded program, if there is
no robot available.
Solving a grounded program is often done with
SAT solving techniques that are adapted to the sta-
ble model semantics of ASP. A model in ASP is a
set M of ground predicates that for every rule either
contains the rules head (a
0
∈ M), or does not include
all predicates of the positive part of the rule’s body
({a
1
, . . . , a
m
} * M), or contains predicates from the
negative part of the rules body ({a
m+1
, . . . , a
n
} ∩ M 6=
/
0). Informally speaking, a stable model is as small as
possible and contains predicates, only if they are jus-
tified by facts. For a detailed introduction into stable
model semantics see (Eiter et al., 2009).
In our approach we choose the Clingo 4.5.3 ASP
solver (Gebser et al., 2014), which introduces the no-
tion of External Statements to ASP (Gebser et al.,
2012; Gebser et al., 2015). External Statements in
combination with program sections, explained later
on, are the key concepts for enabling the query seman-
tics described in Section 4. The External Statements
are predicates marked with #external. These predi-
cates are not removed from the body of a rule during
grounding, even if they do not appear in the head of
any rule. Furthermore, they can be explicitly set to
true or false. An example for the use of External
Statements is given in Listing 2.2.
1 # e x t erna l c l o sed ( lab , h a l l ) .
2 c ( lab , hall ) : - not clo s e d ( lab , h a l l ) .
3 dc ( lab , hall ) :- close d ( lab , hall ) .
Listing 2: Modeling a door using an External Statement.
This example is part of our evaluation scenario
presented in Section 5 and will be used in ASPVaria-
bleQueries presented in Section 4.1. In this example
closed(lab, hall) is marked as an External State-
ment and is therefore initially set to true. Given the
predicate closed(lab, hall), the head of Rule 3
holds and the predicate dc(lab, hall) is part of the
stable model. The head of Rule 2 cannot be derived
since closed(lab, hall) is set to be true. Usually,
during the grounding procedure Rule 2 would be re-
moved, because its body cannot be derived. Howe-
ver, since this rule contains an External Statement,
it stays part of the grounded logic program. The-
refore, it is possible to change a logic program wit-
hout another grounding step by using External State-
ments. Furthermore, the size of the stable model does
not change. For example, if the External Statement
closed(laboratory, hall) is set to true the labo-
ratory and the hall are disconnected from each other.
If it is set to false the predicate dc(lab, hall) no
longer holds but c(lab, hall) can be derived, thus
the rooms are connected.
Additionally, Clingo introduces program secti-
ons (Gebser et al., 2014). Program sections are used
to divide a logic program into different parts, which
can be grounded separately. An example is given in
Listing 2.2.
1 # p r o gram r c c4 _ com p os i ti o n_t abl e .
2 dc (X ,Z ) :- pP ( X, Y ) , dc (Y , Z) ,X != Z.
3 # p r o gram rc c 4_fa c ts
4 pP ( off i c e 1 , off i c es ).
5 dc ( off i c e s , st u den t Area ) .
Listing 3: Usage of program sections.
This example contains two program secti-
ons identified by the #program prefix, i.d.,
rcc4_composition_table and rcc4_facts.
Moreover, the order in which they are
grounded influences the facts, which ap-
pear in the stable models. If the section
rcc4_composition_table is grounded before
the section rcc4_facts, the resulting model would
only contain the facts pP(office1, offices)
and dc(studentArea, offices). If section
rcc4_facts is grounded first, the model will con-
tain these two facts before the program section
rcc4_composition_table is grounded. Once this
section is grounded the model will additionally
contain the fact dc(office1, studentArea), since
the body of this rule holds for the grounding of X by
office1, Y by offices, and Z by studentArea.
2.3 Region Connection Calculus
In this section the base relations of the Region Con-
nection Calculus 4 (RCC-4) are shown, which is ba-
sed on the Region Connection Calculus 8 presented
by Randell et al. in (Randell et al., 1992). We have
Reasoning for Autonomous Agents in Dynamic Domains
343
been inspired to use RCC-4 instead of using RCC-8
by the implementation of RCC-4, that is provided by
the QSRlib Foundation (Gatsoulis et al., 2016). These
calculi are commonly used in qualitative spatial rea-
soning and will be used to model our evaluation sce-
narios in Section 5. The foundation of the relations is
the binary relation C(x,y), which expresses that two
spatial regions of unknown size are connected. In-
formally speaking, they share at least one common
point. Furthermore, C(x,y) is reflexive and symme-
tric. By using the C(x,y) relation four base relations
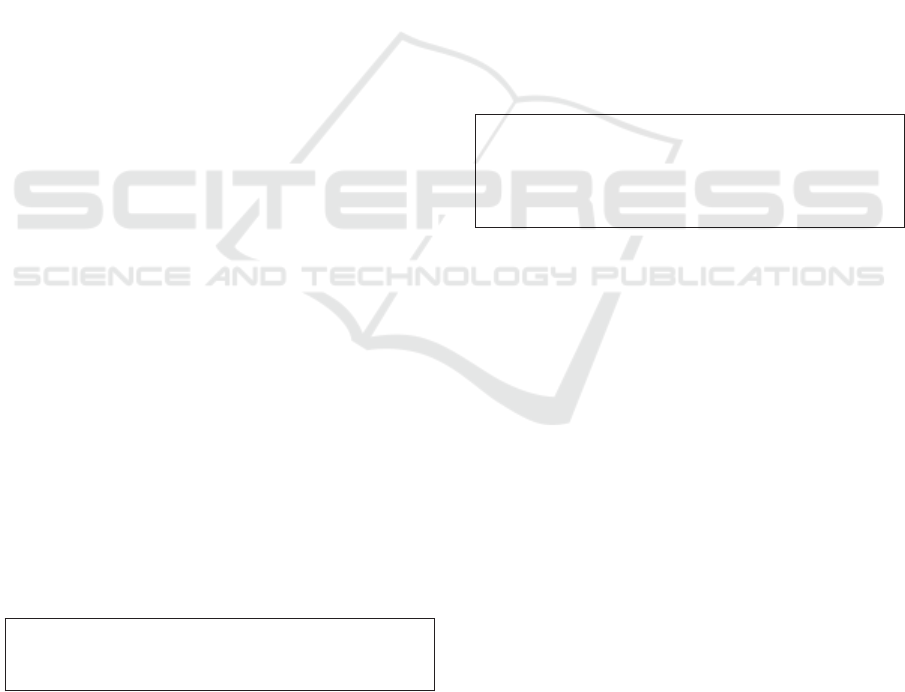
are defined and shown in Figure 4.
x
y
x
x
x
y
y
y
PO(x,y)
PP(x,y)
PPI(x,y)
DC(x,y)
Figure 4: RCC-4 base relations.
Two regions are partially overlapping (PO), if they
are connected (C), meaning they share a common
point, region or part of their border. Region x is a
proper part (PP) of Region y, if y contains Region x,
which means that Region x is connected to y and no
part of x is outside the border of y. Since this relation
is not symmetric the inverse relation PPI is included
as well. Additionally, two regions are disconnected
(DC) if they do not share a common point. By using
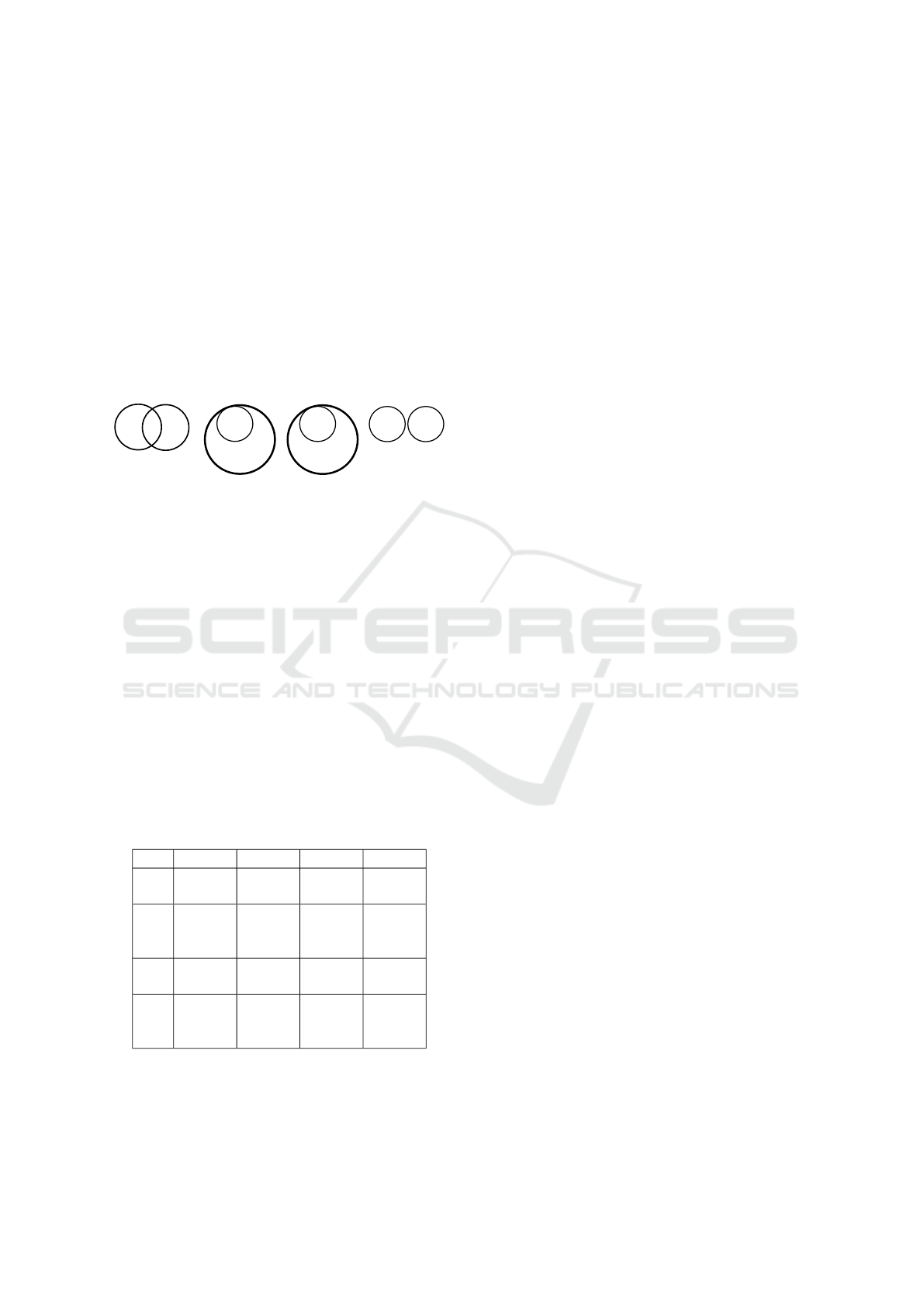
the composition table shown in Table 1 the transitive
relations between Region x and z can be derived, gi-
ven the relations between the pairs (x,y) and (y, z).
Hereby, ∗ denotes that all four relations can hold. For
example, if Region x is a proper part (PP) of Region
y and Region y is disconnected (DC) from Region z,
it can be derived that Region x is disconnected (DC)
from Region z.
Table 1: RCC-4 Composition Table.
DC PO PP PPI
DC *
DC
PO PP
DC
PO PP
DC
PO
DC
PO
PPI
* PO PP
DC
PO
PPI
PP DC
DC
PO PP
PP *
PPI
DC
PO
PPI
PO
PPI
PO PP
PPI
PPI
An example using RCC-4 to model a building is
given in Section 5. Furthermore, the RCC-4 relations
can be used to model the relation of objects to each
other. For example, in the domain of domestic service
robots RCC-4 can be used to model objects on a table
without defining their exact positions, e.g., a cup and
a plate could be proper parts of the table and could be
disconnected from each other, if they are not touching
each other.
3 EXTENDING ALICA WITH A
GENERAL SOLVER
INTERFACE
In this section we describe the extension of the
ALICA framework with a general solver interface, in
order to integrate different solvers into the ALICA
framework. By now, ALICA has only been able to
use a gradient solver, which is able to solve non-linear
continuous constraint satisfaction problems.
In order to use other solvers besides this solver
an interface IConstraintSolver has to be created.
This interface includes four classes and provides two
access methods. Every solver which is added by this
interface has to inherit from the IConstraintSolver
interface. Furthermore, solvers constraint classes
derived from the Variables interface with a set
of constraints composed from different Terms. Fi-
nally, the ProblemDescriptor encapsulates the con-
straints, that have been build by using Terms and
provides possible restrictions for the range of the
Variables. As already mentioned, the interface pro-
vides two access methods. The first method is na-
med existsSolution. This method checks if a solu-
tion can be found and returns the corresponding truth
value. The second method is named getSolution.
Instead of checking if a solution can be found, this
method actually calculates the solution for the given
Variables and ProblemDescriptor. The calcula-
ted results are returned in a list of values defined by
the solver. In this list the results are ordered in the
same way the Variables are ordered, when they are
given to the solver, so that the caller of this method
can find the requested values.
For example, the gradient solver returns continu-
ous (double) values or an ASP solver could return a
set of predicates. Furthermore, the Variables utilise
the hierarchy of ALICA plans. A Variable defined
in a plan can be constrained by additional Terms, if
the identical Variable is used by a plan lower in the
plan tree. For example, in the domain of service ro-
bots, the robot has to get a cup of coffee from the
kitchen. Therefore, the robot’s navigation goal could
be constraint to the area of the kitchen. In a plan, dee-
per in the tree, the robot’s task could be defined in
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
344
detail. This would add additional constraints to the
navigation goal, for example, that a robot has to be in
a specific area in front of the coffee machine to place
the cup in the machine. This is an advantage of the
ALICA framework, since additional constraints on a
Variable only have to be considered if an agent rea-
ches the specific plan. As a consequence of this hier-
archy the time the solvers takes to finish can be redu-
ced, since complex constraints have only to be solved
if an agent reaches plans deep in the plan tree.
So far, the presented interface has been used to
integrate three different solvers. The first solver is
the gradient solver, which was a part of the original
ALICA framework and has been adapted to the new
interface. Additionally, an ASP solver, which is pre-
sented in this work, is integrated by using this inter-
face. Furthermore, Witsch presents in (Witsch, 2016)
a middleware that enables a decision making process
for a group of robots. This middleware uses the pre-
sented interface to exchange variables and proposals
between agents.
4 EXTENDING CLINGO WITH
QUERY SEMANTICS
This section is divided into two subsections. The cre-
ated query structure is presented in Subsection 4.1.
Furthermore, an ASPQuery’s workflow is depicted in
Subsection 4.2.
4.1 Query Structure
To enable ASP queries a data structure is needed that
can be used by ALICA behaviours. This data struc-
ture is named ASPQuery. Following the interface
mentioned above, an ASPQuery forwards an ASP-
Term, which constraints an ASPVariable to the sol-
ver. The ASPTerm provides six fields and allows the
user to define a set of ASP rules, which are part of a
given ASP program section. These rules are then ad-
ded to the solver’s logic program and are used to de-
rive knowledge from the stable models. Furthermore,
it is possible to add facts to the ASPTerm in order
to add further information to the stable models of the
ASP solver. For example, to add information received
from other robots. Moreover, a dictionary is used to
change the truth value of the logic program’s External
Statements. Additionally, the lifetime of the query is
given, that denotes, how long a query should stay part
of the solver’s logic program. To ensure this functio-
nality, each query utilises the information given in the
ASPTerm to create a unique External Statement, that
is added to each rule and fact. As long as the query’s
lifetime is not expired this External Statement is set
to true and the rules and facts are part of the logic
program. Once the query’s lifetime is expired, this
External Statement is set to false, thus removing the
rules and facts form the logic program. As a last point,
the query’s type is given. An example for the use of
an ASPTerm is given in Listing 4.1.
1 te r m . r u l e ( go a lRe a cha b le ( X ) :-
re a c habl e ( X ,Y ) , g (X ) ,s (Y ) .) ;
2 te r m . a ddFac t ( g( r 1 405B ) .) ;
3 te r m . a ddFac t ( s( r 1 4 1 1 ) .) ;
4 te r m . pr o gra mmS e cti o n ( ds ) ;
5 te r m . ext e rnal s ( doors ) ;
6 te r m . lif e Time (1) ;
7 te r m . t y p e ( V aria b l e );
Listing 4: Example of an ASPTerm.
Listing 4.1 is part of an ASP navigation, which
will be explained in detail in Section 5. This example
is used to query, if room r1405B can be reached from
a given starting point r1411. Therefore, a rule and
two facts are added to the program section ds (Dis-
tributed Systems). Since the resulting query will add
rules and facts to the ASP program, this query can
change the stable models of the ASP solver. The-
refore, the type is set to ASPQueryType::Variable.
Furthermore, External Statements and their truth va-
lues are added, which express if a specific door in the
evaluation scenarios is open or closed. Finally, the
query’s lifetime is given.
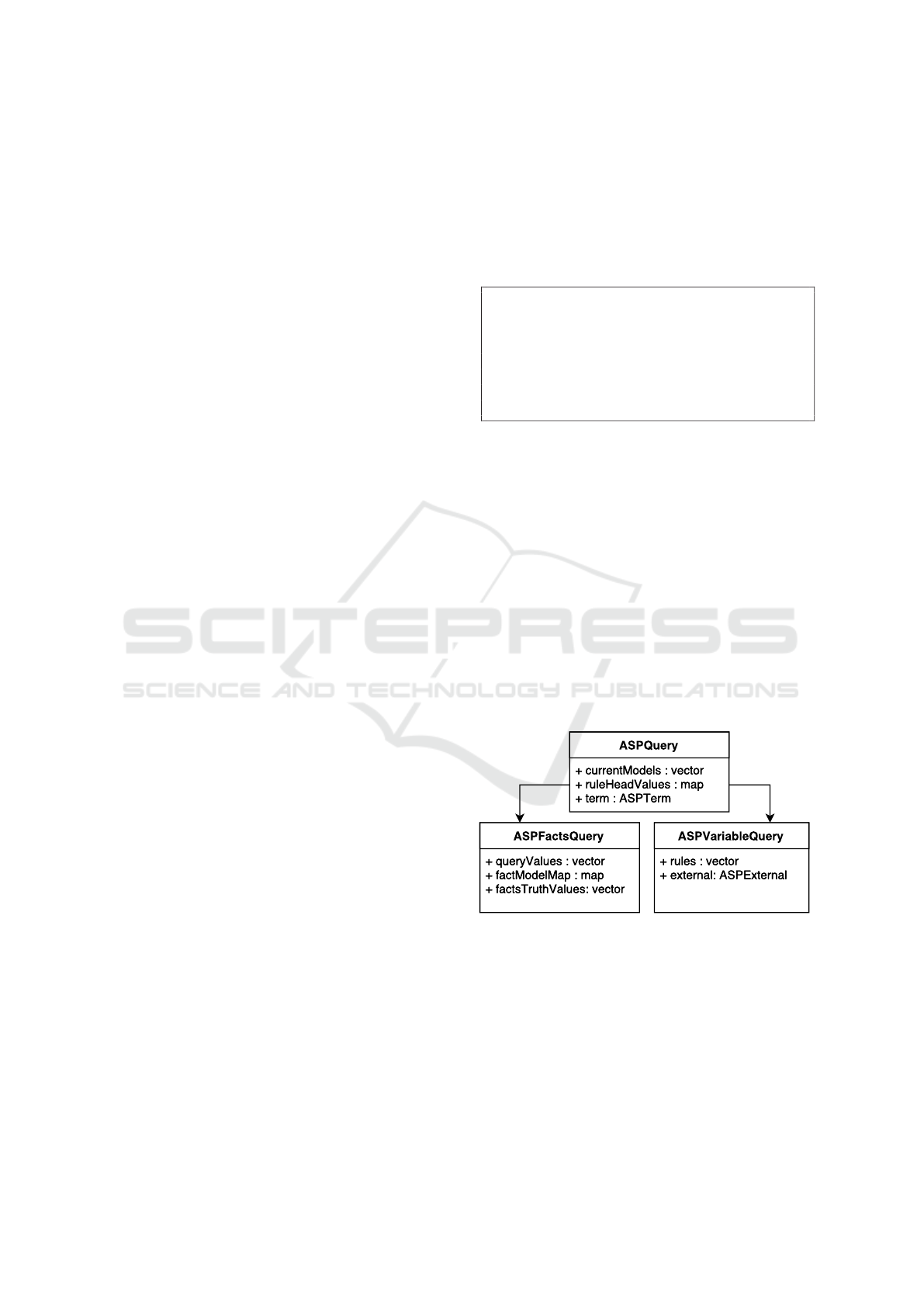
The class model of the possible query types is de-
picted in Figure 5.
Figure 5: Classmodel of ASPQueries.
The base class ASPQuery provides three fields for
the derived classes. The list currentModels is a pla-
ceholder in which the solver’s stable models are saved
after the solving process is finished. Additionally, the
dictionary ruleHeadValues maps the rules heads of
an ASP query to their grounded instances in the stable
models. Furthermore, it contains an ASPTerm, that
has been described above and encapsulates the rules
and facts, which should be added to the solver’s logic
program.
Reasoning for Autonomous Agents in Dynamic Domains
345
The first class derived from ASPQuery is the ASP-
FactsQuery. In our approach the ASPFactsQuery pro-
vides the query functionality described in (Gelfond
and Kahl, 2014). Gelfond et al. present a query
structure that is used to check, if a ground predi-
cate is part of the solver’s stable models. Hereby the
query returns true, if the predicate is part of the sta-
ble models, false, if the classical negation is part
of the stable models and unknown if neither is part
of the stable models. Therefore, the ASPFactsQuery
is used to filter the current stable models for given
facts, which are saved in the list queryValues. If
there is a model that contains one of these facts, it
is added to the factModelMap. Furthermore, the list
factsTruthValues is used to get the corresponding
truth value for each queried predicate. This list con-
tains true for a positive predicate, false for a predi-
cate with classical negation and unknown otherwise.
The second class derived from ASPQuery is the
ASPVariableQuery, that is used to add rules and
facts to an ASP program in order to derive know-
ledge from the solver’s stable models. This kind of
queries have the following form: query(X
1
, . . . , X
n
),
where X
1
, . . . , X
n
are variables. The answer to this
query is a sequence of ground terms t
1
, . . . , t
n
where
query(t
1
, . . . , t
n
) is part of the solver’s stable models.
In order to enable such kind of queries, the ASPVari-
ableQuery adds rules and additional facts to the sol-
ver’s program, which are part of the ASPTerm. He-
reby the rule heads have the form presented above.
During the creation of this query, a unique External
Statement and program section are created. This Ex-
ternal Statement is added to the rules’ bodies. Addi-
tionally, the facts are expanded to rules, in which the
facts are used as the head of the rule and the Exter-
nal Statement as the body. The newly formed rules
are added to the solver’s logic program in the created
program section, which is then grounded. Once the
solver has finished the solving process, the results of
the queried rules are returned to the querying ALICA
behaviour. As soon as the lifeTime of the query is
expired the External Statement is set to false, which
removes the rules and facts from the solver’s program
and the stable models.
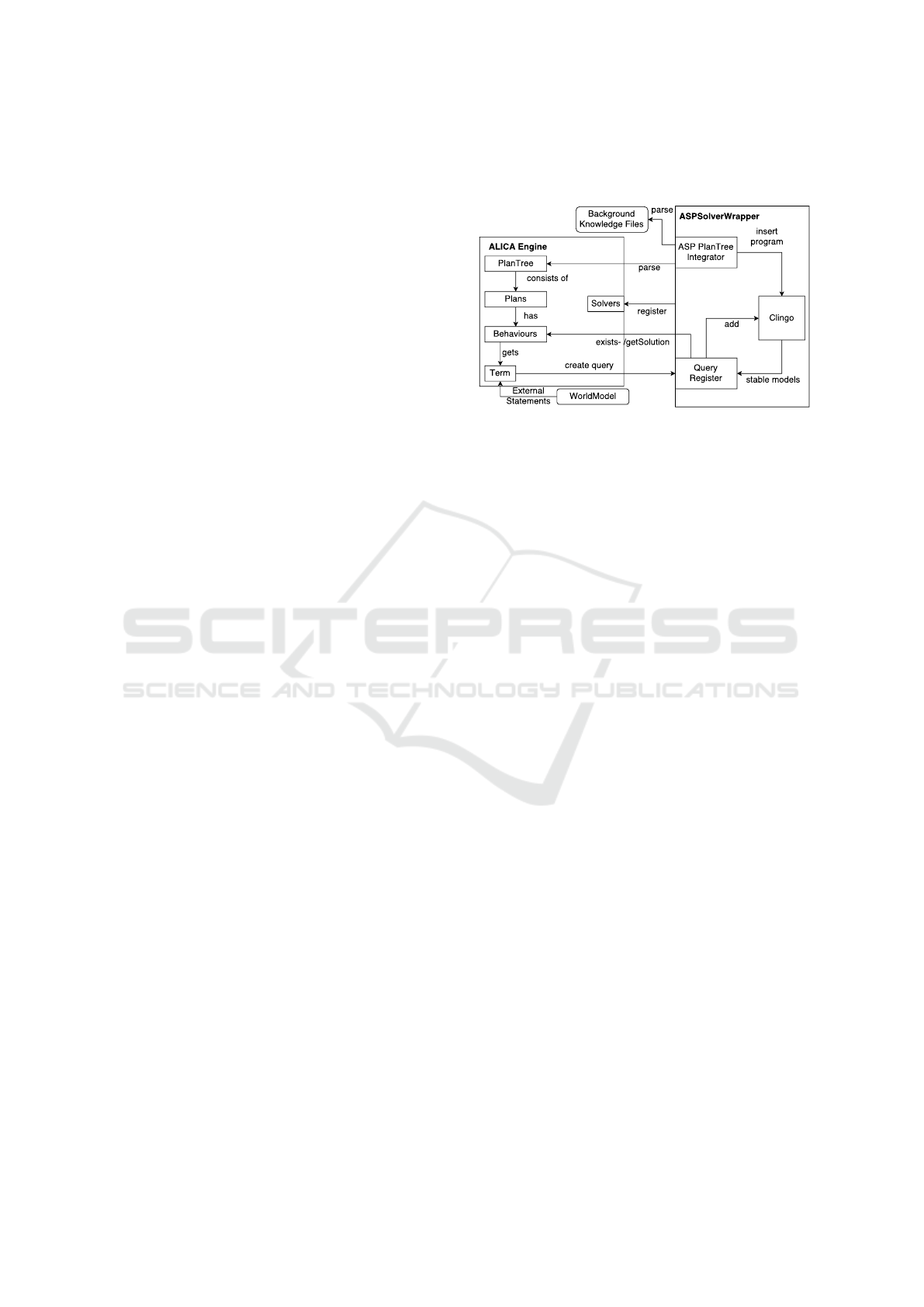
4.2 Workflow of Queries
In order to use the described ASPTerm and ASPQue-
ries, the query structure has to be accessed by the
ALICA behaviours and has to be given to the Clingo
ASP solver. Therefore, a wrapper has been created,
that encapsulates the Clingo ASP solver. This wrap-
per, named ASPSolverWrapper, is registered at the
ALICA framework by using the interface explained in
Section 3 and can be used by ALICA behaviours. The
wrapper and its workflow are depicted in Figure 6.
Figure 6: Query Workflow.
As mentioned in Subsection 2.1, an ALICA pro-
gram consists of a directed acyclic plan tree. The AS-
PTerms needed to formulate queries are created in-
side the runtime conditions of such plans. Once the
ASPTerm is created (example given in Listing 4.1),
it can be used by an ALICA behaviour to formulate
a query. Thereby, the External Statements’ truth va-
lues are given by a worldmodel class, which encap-
sulates data that was perceived by an agent or recei-
ved from other agents, e.g., the state of a door. Af-
ter the ASPQuery has been formulated, it is registe-
red at the wrapper, that passes it to the ASP solver
Clingo. In case of an ASPVariableQuery, the wrap-
per adds the rules and facts to the solver’s ASP pro-
gram. Additionally, the ASPPlanTreeIntegrator par-
ses the ALICA program’s plan tree to enable reaso-
ning about its structure, which is done by rules gi-
ven in background knowledge files. These files, for
example, contain rules to detect malformed ALICA
programs. The corresponding ASP rules are presen-
ted in (Opfer et al., 2016). The ASPPlanTreeIntegra-
tor is only used for the first registered query, since the
predicates stay part of the following stable models as
soon as they have been grounded. Furthermore, this
increases the runtime of the first query but reduces the
runtime of the following queries, since this program
section has not to be grounded any more. Once all
program parts (queries, background knowledge, and
plan structure) have been added, the Clingo module
grounds and solves the program. The hereby deri-
ved stable models are passed to the registered que-
ries and saved to enable further use by other parts of
the ALICA framework, especially the ALICA beha-
viours. Finally, the results are returned to the ALICA
behaviour via two methods defined by the created in-
terface. The first method is named existsSolution,
which checks the truth value of the query without
returning stable models or ground predicates. This
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
346

method can for example be used in combination with
an ASPFactsQuery, which checks if an ASP predi-
cate is part of at least one or all stable models, since
the caller is only interested if the queried fact is part
of the stable models. The second method is named
getSolution. This method is used to return the deri-
ved stable models to the querying ALICA behaviour.
This method can for example be used in combination
with an ASPVariableQuery, where rules and facts are
added. Since the ASPVariableQuery adds additional
rules and facts to the ASP program the resulting sta-
ble models are returned to the querying ALICA be-
haviour. After the results are returned, the ALICA
behaviour can react to the changes in the model. By
returning the calculated results to the ALICA behavi-
our, the workflow of a query is finished and the que-
ries lifetime is reduced by one. After this process, the
ALICA behaviour can create the next query.
5 EVALUATION SCENARIO
Our approach of handling dynamic domains will be
explained by using the following scenario. The sce-
nario is placed in the Distributed Systems Department
of the University of Kassel. A map of this department
was created by using a TurtleBot produced by Wil-
low Garage (WillowGarage, 2010), which is a small
service robot equipped with a 3D camera sensor. Ad-
ditionally, we equipped the TurtleBot with a 2D laser
scanner in order to create a map of the department.
Our adapted version of the TurtleBot is shown in Fi-
gure 7 and an annotated version of the resulting map
is shown in Figure 8.
Figure 7: Adapted Version of a TurtleBot.
This map consists of 19 rooms and is divi-
ded into seven areas, which are highlighted in
different colours. These areas include from left
to right studentArea (red), mainHallA (black),
workshop (green), offices (blue), mainHallB (pur-
ple), utility (yellow) and organization (orange).
Additionally, 56 points of interest (POI), examples
marked with dots, are placed on this map, e.g.,
different workplaces or the coffee machine. The
robot’s position is marked by a circle. The re-
lations between the areas, rooms and POIs are
modelled using the Region Connection Calculus
4. Hereby, a POI is a properPart of a speci-
fic room and disconnected to all other rooms.
Rooms are either partialOverlapping with other
rooms, properPart of areas or disconnected from
both. Areas can either be partialOverlapping or
disconnected. By using these relations the Distri-
buted Systems Department has been modelled. Addi-
tionally, we used External Statements to model doors
between two partialOverlapping rooms, as shown
in Listing 2.2. The use of External Statements enables
our approach to change the ASP solver’s logic pro-
gram without an additional grounding step after the
initial grounding. This should decrease the runtime
for answering ASPQueries and keep the models’ size
stable since no additional predicates have to be ad-
ded to open or close doors. Moreover, we implemen-
ted an ALICA behaviour, which uses an ASPFact-
sQuery to check if the robot’s goal position (cross)
is reachable from its current position. Furthermore,
we implemented a simple path planning approach re-
lying on a transitive closure defined by the predicate
reachable(X,Y). The transitive closure to check if a
goal is reachable is shown in Listing 5.
1 rea c h abl e ( X ,Y ): - pO (X ,Y ) ,r (X ) ,r ( Y) .
2 rea c h abl e ( X ,Y ): - pO (X ,Y ) ,a (X ) ,a ( Y) .
3 rea c h abl e ( X ,Y ): - pP (X ,Y ) ,r (X ) ,a ( Y) .
4 rea c h abl e ( X ,Y ): - rea c habl e (Y ,X ) ,X != Y .
5 rea c h abl e ( X ,Z ): - rea c habl e (X ,Y ) ,
re a c habl e (Y ,Z ) , X !=Y ,Y !=Z ,X != Z .
Listing 5: Transitive closure of reachable relation.
Hereby, a room r(X) or area a(X) is reachable
from another room r(Y) or area a(Y) if they are par-
tial overlapping pO(X,Y), which is defined by Rule 1
& 2. Furthermore, a room is reachable from an area
if the room is a properPart (pP) of the area (Rule
3). In addition, the reachable relation is symmetric
(Rule 4) and transitive (Rule 5).
6 EVALUATION
In this section the evaluation results are presented and
discussed. Therefore, the presented evaluation sce-
nario has been modelled in two ways. The first one
Reasoning for Autonomous Agents in Dynamic Domains
347

Figure 8: Map of the Distributed Systems Department.
purely relies on modelling the department by facts,
named noExt. The second way was presented in
Section 5 is named Ext. Additionally, both ways of
modelling the department use the transitive closure to
enable a simple path planning approach that is used
to check if a room or POI is reachable from another
room, area, or POI. In Figure 8 the robot’s starting
position is marked by a circle and the goal is mar-
ked by a cross. The path leaves the studentArea
and follows mainHallA to reach mainHallB since the
door from mainHallA to the offices is closed. From
mainHallB the path will enter the offices through
door d and finally reaches the goal, which is situated
inside the utility area. Door d is the solely open
door in mainHallB and is opened and closed via an
External Statement to simulate a change in the envi-
ronment.
To evaluate the wrapper and the implemented
query structure, we use the presented scenarios in the
following way: During the first step the logic program
is grounded and a navigation query is solved. Hereby
two rooms are selected and checked if they are reacha-
ble from each other, which is not possible in this step.
The second step is a purely solving step to be able to
compare the time needed. Step three is used to “open
a door”, which means either a new grounding step
(noExt), the change of an External Statement (Ext)
or to create a new solver instance. In this step the na-
vigation between the rooms is possible. The last step
is a purely solving step again.
The evaluation results using model Ext, noExt,
and instantiating a new solver are presented in Fi-
gure 9. All measurements include grounding and
solving time and show a very low standard devia-
tion of 2.8 ms for the initial grounding with Ext and
0.18 ms when using noExt or instantiating a new sol-
ver, which shows that the measured runtimes are sta-
ble and will not show significant variations in time.
The initial grounding and solving is the most
time consuming operation and lasts 107.6 ms when
using Ext and 47.4 ms when using noExt or a crea-
ting a new solver instance. This is caused by additi-
onal steps during the first grounding, which include
Initial Ground Solve Open Door Solve
0
20
40
60
80
100
120
External Statements No External Statements Instantiate new Solver
runtime [ms]
Figure 9: Comparison of different modelling approaches.
the parsing of the ALICA plan tree and grounding
the resulting predicates. Additionally, these steps in-
clude the verification of the well-formedness of this
plan tree by ASP Rules and the parsing and groun-
ding of the corresponding model of the Distributed
Systems Department map. The difference in time
between these two results is caused by the way the
department is modelled. Without the use of Exter-
nal Statements noExt each connection between two
rooms is modelled by a single predicate. When using
Ext the connection between two rooms is modelled
with an External Statement and two rules expressing
that a door can be either opened or closed. This incre-
ases the logic program’s size which causes a longer
grounding and solving time. The test results, when
using Ext, show no difference in runtime when sol-
ving or changing the truth value of an External State-
ment. Both operations take roughly 13.8 ms. Additi-
onally, the stable model’s size is not affected by chan-
ging the truth value of an External Statement. In com-
parison, when using noExt or when using a new sol-
ver instance, solving and changing a door state differ
in runtime. Solving without any change in the model
will take 6.5 ms when using noExt but changing a part
of the model will last 19.6 ms, since a new program
section has to be grounded. Furthermore, this incre-
ases to size of the stable model’s size by 156 facts,
which is the number of relations between the rooms
of the Distributed Systems Department. In contrast to
noExt creating a solver differs in runtime regarding
a change in the model, since a initial grounding step
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
348
has to be performed for every change resulting in an
grounding time of 47.4 ms.
Due to the fact that the ALICA framework step
frequency is usually set to 30 Hz, an ALICA beha-
viour can formulate up 30 queries per second. In
Figure 10 all three methods for modelling the de-
partment are compared with respect to the amount of
changes per second.
0 5 10 15 20 25 30
0
5
10
20
30
40
50
External Statements No External Statements Instantiate new Solver
Number of Changes
runtime [ms]
Figure 10: Comparison of measured time regarding changes
in the model.
The x-axis shows the number of changes in the
model and the y-axis the queries average runtime in
30 ALICA framework steps. Since there is no diffe-
rence in solving and changing a value when using Ext
the blue line is constant. In comparison to this the
runtime of noExt increases when changes are made,
since a new program part has to be grounded for each
change. Both lines intersect at 17 changes. Corre-
sponding to this result, we may conclude that noExt
is suitable, if the modelled scenario is stable and does
not change often. In dynamic scenarios we suggest
the use of External Statements, since changes do not
affect the runtime. Furthermore, when using noExt
the stable model’s size increases with every change
made. In contrast, when using Ext, the models size
stays the same. Therefore, we recommend to use
noExt only for stable scenarios, since the model size
will grow rapidly and will slow down the process of
handling the models. This could be countered by dis-
carding and creating a new ASPSolver instance after
a few changes. This method is depicted by the green
line, which intersects the blue line by six changes and
is the slowest solution. Therefore, we suggest the use
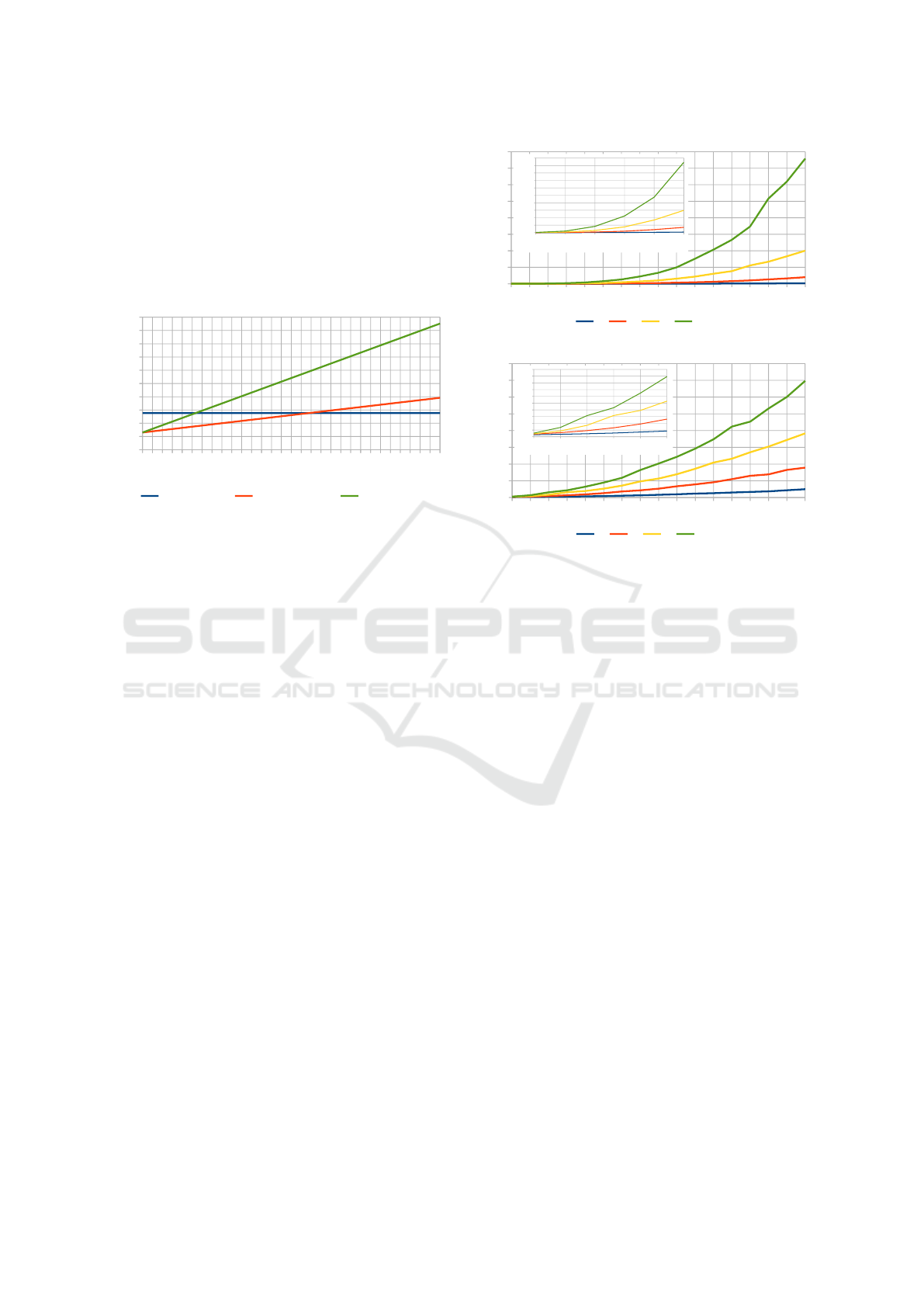
of Ext.
Additionally, we evaluated the scalability of the
Region Connection Calculus 4. Therefore, we used
the navigation scenario presented in 4 and expanded
the number of rooms, starting from 100 rooms and
ending with 1700 rooms. Furthermore, we tested dif-
ferent percentages of connection between the rooms
ranging from 25 % to 100 %. The results are shown in
Figure ?? and 12.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
0
0.5
1
1.5
2
2.5
3
3.5
4
25 50 75 100
Number of Rooms x100
runtime [h]
1
2
3
4
5
6
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Number of Rooms x100
runtime [min]
Figure 11: Runtime of the initial grounding.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
0
400
800
1200
1600
25 50 75 100
Number of Rooms x100
runtime [ms]
1
2 3 4
5
6
0
40
80
120
160
200
runtime [ms]
Number of Rooms x100
Figure 12: Runtime of the solve step.
As you can see, both runtimes increase exponen-
tially with rising percentage and number of rooms.
Hence, the collection of evaluation data was stop-
ped at 1800 rooms with 100 % connection, since the
grounding step did not stop after four hours and was
aborted. Considering the exponential increase in run-
time, we suggest not to use the Region Connection
Calculus 4 for transitive closure based path planning
in dynamic domains, if more than 600 regions have
to be considered. We suggest this number, since after
an initial grounding of roughly five minutes, the robot
can react to changes in the knowledge base with 5 Hz,
which we consider suitable for a dynamic domain.
7 RELATED WORK
Besides the ALICA framework other domain inde-
pendent frameworks could be used to integrate an
ASP solver for the use in different robotics scenarios.
These frameworks and further related work are pre-
sented in this section.
One of these frameworks is DyKnow presented
in (Heintz et al., 2010). The ALICA framework pro-
vides a domain independent framework to model the
behaviour of multiple agents. These agents can col-
lect domain specific information and knowledge in
an unspecified way and use these to adapt their be-
haviours. In comparison to this DyKnow focuses on
the distributed collection and distribution of varying
Reasoning for Autonomous Agents in Dynamic Domains
349

kinds of data, that includes raw sensor values, pro-
cessed sensor values or even predicates, which hold
between objects recognised in the world. The needed
processes to collect and to process the data are spe-
cified with the knowledge processing language pro-
vided in (Heintz et al., 2010). These processes pro-
vide collected data respectively derived information
and knowledge which can be used by multiple agents.
Furthermore, these processes can provide knowledge
about objects and the relations between them, which
could be passed to a solver to allow reasoning about
them. This can be compared to the knowledge base
given in our wrapper and the domain specific kno-
wledge given in ALICA behaviours. In contrast to
the ALICA framework DyKnow does not provide the
use of hierarchically constrained variables that can be
used to formulate queries of increasing complexity to
an ASP solver.
Another framework is KnowRob presented in (Te-
north and Beetz, 2013). The central part of this fra-
mework is the knowledge base. This knowledge base
provides a knowledge store and access methods for
retrieving information saved in Prolog relations. The
“virtual knowledge base” is an extension to a robot’s
knowledge base by computation of abstract represen-
tations only when the corresponding data is queried
and by forwarding queries to parts of the robot which
can provide better answers. In comparison to the
ALICA framework both use a declarative program-
ming language to create the knowledge base. Further-
more, queries can increase the knowledge base during
the computation of their answer. But in contrast to the
ALICA framework with the included ASP wrapper
KnowRob does not support multiple agents.
Furthermore, in (Gebser et al., 2015) one-shot
solving is compared with multi-shot solving based
on External Statements. Hereby they used bench-
marks given by the Fifth ASP Competition and sup-
port our results regarding External Statements in dy-
namic domains. Nevertheless, they always investiga-
ted External Statements in the context of expanding
universes. According to our knowledge, our work is
the first investigating the advantages of External Sta-
tements in the context of dynamic universes of almost
constant size.
8 CONCLUSION AND FUTURE
WORK
In this paper we presented the integration of the
Clingo ASP solver with the ALICA framework. The-
refore, an interface has been created, that can be used
with several solvers. Additionally, the integrated ASP
solver has been wrapped to enable queries against re-
sulting models and temporarily adding rules and facts.
Several tests have been performed in order to eva-
luate the runtime of a query. The results showed
that both ways of modelling (with or without Exter-
nal Statements) respond in less than 20 ms and there-
fore can be considered as suitable for dynamic dom-
ains. Nevertheless, we prefer to use External State-
ments, since they do not increase the size of the re-
sulting stable models when the environment changes.
Another option to avoid an increasing model size is
to create a new solver instance whenever something
changes. However, this would significantly increase
the query runtime, making this option unfavourable
starting from 5 changes per second. Therefore, we
propose the use of External Statements to model dy-
namic domains, such as human-populated service ro-
botic domains. Furthermore, we evaluated the sca-
lability of the Region Connection Calculus 4 using
the example of determining the transitive closure of
the reachability relation. From the results, we may
conclude that the calculus scales up to a number of
600 regions, since after an initial grounding time of
roughly five minutes an agent can still query its kno-
wledge base at a rate of 5 Hz.
In our future work, we will further investigate
the performance of External Statements in dynamic
domains by applying the presented approach in va-
rious scenarios. This investigation will be joined
with knowledge-based collaboration between multi-
ple agents. Currently each agent has its own know-
ledge base that is independent from all other know-
ledge bases. We want to allow agents to query kno-
wledge bases of other agents. In the scenario from
Section 5, for example, an agent that is unable to re-
ach its destination could ask other agents for open
doors, instead of searching for open doors by itself.
Another aspect of knowledge-based collaboration
is about global consistent stable models. In ASP, it is
possible that several valid models exist, but it is often
desirable that a team agrees on the same or a simi-
lar model. Therefore, agents could exchange relevant
parts or even complete models between each other, in
order to choose the local model that is most similar to
the parts received from other agents.
REFERENCES
Brachman, R. J. and Levesque, H. J. (2003). Knowledge
Representation and Reasoning. Morgan Kaufmann,
Morgan Kaufmann Series in Artificial Intelligence.
Brewka, G., Eiter, T., and Truszczy
´
nski, M. (2011). Answer
set programming at a glance. Communications of the
ACM, 54(12):92–103.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
350

Eiter, T., Ianni, G., and Krennwallner, T. (2009). Ans-
wer Set Programming: A primer. In Tessaris, S., En-
rico Franconi, Eiter, T., Gutierrez, C., Handschuh, S.,
Rousset, M.-C., and Schmidt, Renate A. Schmidt, edi-
tors, Reasoning Web. Semantic Technologies for Infor-
mation Systems, volume 5689. Springer, Berlin and
New York.
Gat, E. (1998). On Three-Layer Architectures. In Kor-
tenkamp, D., Bonasso, R. P., and Murphy, R., edi-
tors, Artificial Intelligence and Mobile Robots: Case
Studies of Successful Robot Systems, pages 195–210.
MIT Press, Cambridge, USA.
Gatsoulis, Y., Alomari, M., Burbridge, C., Dondrup, C.,
Duckworth, P., Lightbody, P., Hanheide, M., Hawes,
N., Hogg, D. C., and Cohn, A. G. (2016). QSRlib:
A Software Library for Online Acquisition of Quali-
tative Spatial Relations from Video. In Bredeweg, B.,
Kansou, K., and Klenk, M., editors, Proceedings of
the 29th International Workshop on Qualitative Rea-
soning, pages 36–41.
Gebser, M., Grote, T., Kaminski, R., Obermeier, P., Sa-
buncu, O., and Schaub, T. (2012). Answer set pro-
gramming for stream reasoning. In Eiter, T. and McIl-
raith, S., editors, Proceedings of the Thirteenth Inter-
national Conference on Principles of Knowledge Re-
presentation and Reasoning (KR’12), volume 13, pa-
ges 613–617. AAAI Press.
Gebser, M., Janhunen, T., Jost, H., Kaminski, R., and
Schaub, T. (2015). ASP Solving for Expanding Uni-
verses. pages 354–367. Springer International Publis-
hing.
Gebser, M., Kaminski, R., Kaufmann, B., and Schaub, T.
(2014). Clingo = ASP + Control: Preliminary Report.
In M. Leuschel and T. Schrijvers, editors, Technical
Communications of the Thirtieth International Con-
ference on Logic Programming (ICLP’14), volume
14(4-5).
Gelfond, M. and Kahl, Y. (2014). Knowledge representa-
tion, reasoning, and the design of intelligent agents:
The answer-set programming approach. Cambridge
University Press, Cambridge, USA.
Heintz, F., Kvarnstr
¨
om, J., and Doherty, P. (2010). Brid-
ging the Sense-Reasoning Gap: DyKnow – Stream-
based Middleware for Knowledge Processing. Advan-
ced Engineering Informatics, 24(1):14–26.
Leone, N., Pfeifer, G., Faber, W., Eiter, T., Gottlob, G.,
Perri, S., and Scarcello, F. (2006). The DLV System
for Knowledge Representation and Reasoning. ACM
Transactions on Computational Logic, 7(3):499–562.
Opfer, S., Niemczyk, S., and Geihs, K. (2016). Multi-Agent
Plan Verification with Answer Set Programming. In
Aßmann, U., Brugali, D., and Piechnick, C., editors,
Proceedings of the Third Workshop on Model-Driven
Robot Software Engineering. ACM.
Randell, D. A., Cui, Z., and Cohn, A. G. (1992). A Spatial
Logic based on Regions and Connection. In Nebel, B.,
Rich, C., and Swartout, W., editors, Proceedings of the
3rd International Conference on Principles of Know-
ledge Representation and Reasoning, volume 92, pa-
ges 165–176, San Francisco, CA, USA. Morgan Kauf-
mann.
Skubch, H. (2013). Modelling and Controlling of Behaviour
for Autonomous Mobile Robots. Springer Vieweg, 1
edition.
Skubch, H., Saur, D., and Geihs, K. (2011a). Resolving
Conflicts in Highly Reactive Teams. In Luttenberger,
N. and Peters, H., editors, 17th GI/ITG Conference on
Communication in Distributed Systems (KiVS 2011),
volume 17 of OpenAccess Series in Informatics (OA-
SIcs), pages 170–175, Dagstuhl, Germany. Schloss
Dagstuhl–Leibniz-Zentrum fuer Informatik.
Skubch, H., Wagner, M., Reichle, R., and Geihs, K.
(2011b). A Modelling Language for Cooperative
Plans in Highly Dynamic Domains. In van de Mo-
lengraft, M. and Zweigle, O., editors, Special Issue on
Advances in Intelligent Robot Design for the Robocup
Middle Size League, volume 21, pages 423–433.
Tenorth, M. and Beetz, M. (2013). KnowRob: A Know-
ledge Processing Infrastructure for Cognition-Enabled
Robots. International Journal of Robotics Research,
32(5):566–590.
Wang, J. (2010). PR2 at the Intelligent Autonomous
Systems Group, Technical University Munich.
https://www.flickr.com/photos/jiuguangw/5136649984
[Online; accessed December 9, 2016].
WillowGarage (2010). Turtlebot Website.
http://www.turtlebot.com/ [Online; accessed No-
vember 8th, 2016.].
Witsch, A. (2016). Decision Making for Teams of Mobile
Robots. Dissertation, University of Kassel, Kassel,
Germany.
Reasoning for Autonomous Agents in Dynamic Domains
351
