
Towards Collaborative Adaptive Autonomous Agents
Mirgita Frasheri, Baran Cürüklü and Mikael Ekström
Mälardalen University, Västerås, Sweden
Keywords: Adaptive Autonomy, Autonomous Systems, Agent Architectures, Collaborative Agents, Multi-robot
Systems.
Abstract: Adaptive autonomy enables agents operating in an environment to change, or adapt, their autonomy levels by
relying on tasks executed by others. Moreover, tasks could be delegated between agents, and as a result
decision-making concerning them could also be delegated. In this work, adaptive autonomy is modeled
through the willingness of agents to cooperate in order to complete abstract tasks, the latter with varying levels
of dependencies between them. Furthermore, it is sustained that adaptive autonomy should be considered at
an agent’s architectural level. Thus the aim of this paper is two-fold. Firstly, the initial concept of an agent
architecture is proposed and discussed from an agent interaction perspective. Secondly, the relations between
static values of willingness to help, dependencies between tasks and overall usefulness of the agents’
population are analysed. The results show that a unselfish population will complete more tasks than a selfish
one for low dependency degrees. However, as the latter increases more tasks are dropped, and consequently
the utility of the population degrades. Utility is measured by the number of tasks that the population completes
during run-time. Finally, it is shown that agents are able to finish more tasks by dynamically changing their
willingness to cooperate.
1 INTRODUCTION
Adaptive autonomy (AA) refers to a specific type of
an autonomous system, in which the level of
autonomy is chosen by the system itself (Hardin and
Goodrich, 2009). In general the changes of autonomy
levels of a software agent are set either by (i) the
software agent itself, (ii) other software agents that it
is interacting with, or lastly by (iii) a human operator
(in the remaining text agent is used instead of
software agents for the sake of simplicity). Moreover,
such decision could also be shared between human
operators and agents. As a result, alongside adaptive
autonomy, other common terminology includes the
following: adjustable autonomy, mixed-initiative
interaction, collaborative control, and sliding
autonomy. Each of them addresses changes in
autonomy from different perspectives. From one
view, adjustable autonomy enables the human
operator to change the agent’s autonomy level
(Hardin and Goodrich, 2009). The emphasis in this
definition is on the party which has the authority to
make such changes. On the other hand, the term is
also employed to refer to all different ways in which
decisions on autonomy are shared between human
and agents (Johnson, et al., 2011). In mixed-initiative
interactions (Hardin and Goodrich, 2009), both
human and machine are able to trigger changes of the
autonomy level. Specifically, the machine attempts to
keep the highest level of autonomy, but lowers it in
case the human intervenes. In collaborative control
(Fong, et al., 2001) humans and agents solve their
inconsistencies through dialogue. The human
operator is responsible for defining the high-level
goals and objectives to be fulfilled. The agents are not
autonomous with respect to deciding on their own
goals, but can still make autonomous decisions during
execution. Another approach is sliding autonomy
(Brookshire, et al., 2004). Two extreme modes are
assumed, i.e. tele-operation and full autonomy and
the level of autonomy could be switched between
them on the task level. The human operator is able to
take control of some tasks without taking control of
the whole system.
Autonomy itself has been defined in connection to
the notions of dependency and power relations
(Castelfranchi, 2000). Moreover, in the
aforementioned work, a distinction is made between
autonomy as a function of interaction with the
environment versus interaction with other agents. The
78
Frasheri M., CÃijrÃijklÃij B. and Ekstroem M.
Towards Collaborative Adaptive Autonomous Agents.
DOI: 10.5220/0006195500780087
In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), pages 78-87
ISBN: 978-989-758-219-6
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

former indicates that an agent has some autonomy
from the stimuli it gets from the environment, i.e. it is
not merely a reactive entity. The latter refers to
autonomy – or independence – from other agents. In
case agent A has needs that could be fulfilled by an
agent B, then A is dependent on B for those specific
needs. The latter could refer to a need for information,
a resource, or a goal. B could provide them either
directly, e.g. by physically providing a resource, or by
granting permission.
In this paper it is assumed that changes in
autonomy stem from the dependency relations
between agents. An agent facing some sort of
dependency will ask another agent for assistance. The
other agent will decide whether to engage itself or not
based on its willingness to cooperate. The agents
decide themselves when and if to ask or give
assistance to one another, as a result it could be
assumed that the decision to adapt autonomy is
internal to the agents.
The rest of the paper is organized as follows. A
short account on related work is provided in Section
2. Thereafter, an initial concept of the agent
architecture is proposed in Section 3, which focuses
on the agent interactions, and decision-making
mechanisms based on the willingness to cooperate.
The relations of the latter with the degree of
dependencies between tasks and the utility of the
agent population are depicted in Section 4. Moreover,
it is shown that enabling agents to dynamically
change their willingness to cooperate helps them to
cope better in different situations. Finally, a
discussion is provided on this work, and possible
future ones.
2 RELATED WORK
Shared decision making on autonomy between agents
and humans has been modeled in various ways. The
classical concept (Parasuraman, et al., 2000), defines
10 levels of autonomy: from the lowest, in which the
machine has no decision-making powers, to the
highest, in which the machine is fully autonomous
and potentially opaque to the user (Figure 1). On the
other hand, more recent approaches are inspired from
human collaboration in teams, e.g. Coactive Design
(Johnson, et al., 2011). The focus is on soft
interdependencies between agents which are working
in a team towards some collective goal. Soft
interdependencies are not crucial for success, but are
considered to help the agents be more efficient while
executing some task. On the other hand, hard
interdependencies are crucial for the successful
outcome of a task. From this perspective, earlier
works are considered as being autonomy centred, i.e.
the focus lies on self-sufficiency and self-
directedness, and not on the interdependencies
between the agents. Self-sufficiency refers to the
agent’s ability to take care of itself, whereas self-
directedness refers to the agent’s free will (Johnson,
et al., 2011).
Several works investigate the performance of the
different forms of shared decision-making between
agents themselves and humans. Experiments by
Barber et al. (Barber, et al., 2000) are conducted with
different decision making frameworks, i.e. master-
command driven, locally autonomous, and
consensus, which are applied in scripted
environmental conditions. The frameworks affect the
agents at the task level. For instance, in the master-
command case, an agent A (master) with authority
over B can assign tasks to B, which the latter is
required to perform. Agents become locally
autonomous – they make decisions by themselves –
when the communication is down. In the case of
consensus, there is no leader, consequently agents
have to reach an agreement. The authors’ scenario
involves agents which manage radio frequencies on
military ships; no humans are involved. During the
execution of the environmental scripts, the best
HIGH
10. The computer decides everything, acts autonomously, ignoring the human.
9. informs the human only if it, the computer, decides to
8. informs the human only if asked, or
7. executes automatically, then necessarily informs the human, and
6. allows the human a restrcited time to veto before automatic execution, or
5. executes the suggestion if the human approves, or
4. suggests an alternative
3. narrows the selection down to a few, or
2. The computer offers a complete set of decision/action alternatives, or
LOW
1. The computer offers no assistance: human must take all the decisions and actions
Figure 1: 10 levels of autonomy (Parasuraman et al., 2000).
Towards Collaborative Adaptive Autonomous Agents
79
decision making framework is applied in each case –
the latter is chosen based on results from a previous
study. It is shown that a system which dynamically
switches between decision making frameworks
performs better than the same system under one
decision making framework.
AA, adjustable autonomy and mixed-initiative
interaction are compared in search and rescue
simulation environments by Hardin & Goodrich
(Hardin and Goodrich, 2009). In their experiments,
mixed-initiative interaction performs better than the
other two, in terms of survivors found in the
simulated environment.
Experiments in shared decision making between
humans and a complex autonomous system – both are
to coordinate teams of robots – are discussed by
Barnes et al. (Barnes, et al., 2015). Three levels of
autonomy are considered, either the human makes the
decision with help, or the agent makes the decision
alone, or the human makes the decision alone. They
argue that shared autonomy between human and
agent should be tailored according to the strengths
and weaknesses of each. Also, the level of autonomy
could be influenced by the workload of the operator
at a given time.
Other work is directed toward developing policy
systems that accommodate adaptive behaviour. The
Kaa policy system (Bradshaw, et al., 2005) builds on
top of the existing KaOS system – the latter
implements policy services to regulate behaviour in a
multi-agent system. Kaa adds support for adjustable
autonomy by allowing the policies to be changed
during runtime. A central coordinator takes the
agents’ requests for adjusting autonomy in given
circumstances and decides whether to override the
default policy for a given time. In case Kaa cannot
make a decision it will ask for the human’s feedback.
Kaa was developed in the framework of the Naval
Automation and Information Management
Technology project, in an application concerning
naval de-mining operations.
Adjustable autonomy is also considered in terms
of meeting real-time requirements in a simulated
environment where a human operator and 6 fire
engines have to cooperate whilst sharing resources to
extinguish fires (Schurr, et al., 2009). The RIAACT
model (resolving inconsistencies in adjustable
autonomy in continuous time) is proposed, which
handles the resolution of inconsistencies between the
operator and agents, allows the agents to plan in
continuous time, and makes interruptible actions
possible. They show that RIAACT can raise the
performance of a human-multi-agent system.
3 THE AGENT MODEL
The adaptive autonomy approach presented in this
work does not consider yet specific sensory/motor
specifications, or concrete types of tasks. The focus is
on the interaction between agents and the decision
making mechanisms that would allow them to ask and
give assistance, and the way they could do so without
compromising their performance measures, e.g.
utility. In principle, these measures could be
subjective to each agent.
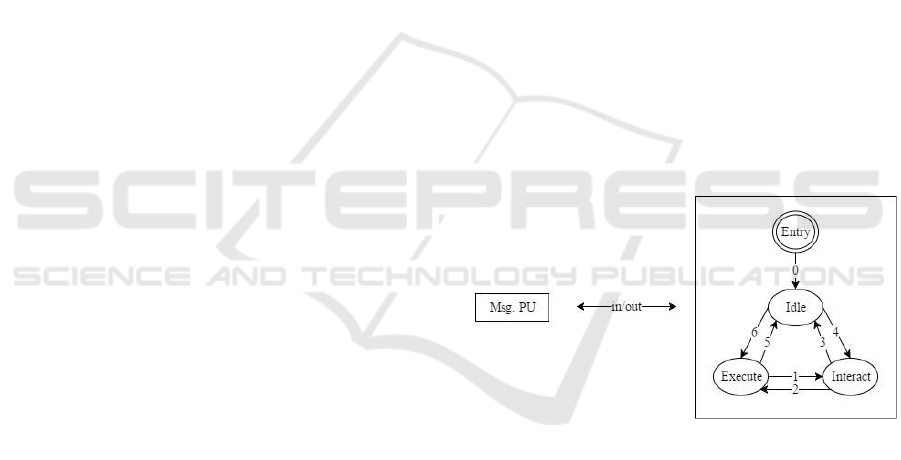
In the proposed model an agent could be in one of
three states: idle, execute, and interact (Figure 2), and
is associated with a willingness to assist others –
expressed as a probability. Messages from other
agents represent the input, and are handled in the
message processing unit (Msg PU). The agent sends
its broadcasts to others through the same unit.
Imagine that an agent is in either idle or execute
state. When it receives a request for assistance it will
change its state (adapt) to the interact state. The
outcome of the decision made in interact will send the
agent either into idle or execute with the new task. In
the latter case, after a task is finished, the agent will
adapt to idle again – valid for both success and failure
outcomes of the job.
Figure 2: States of the agent, and possible transitions
between them.
In idle (Figure 3) the agent is not engaged in any
particular task, nonetheless it can decide whether to
adopt and start the execution of a new one, e.g. it
could generate a task to explore its surroundings. In
principle, based on its perceptions from the
exploration and set of its capabilities, the agent could
possibly create another task for itself when it goes
back to idle.
When the agent chooses to do a task, it will switch
to the execute state (Figure 4). It is assumed that if the
agent is not interrupted, then it will finish any task it
starts. As a result, it is possible to focus only on the
effects of agents assisting each other.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
80
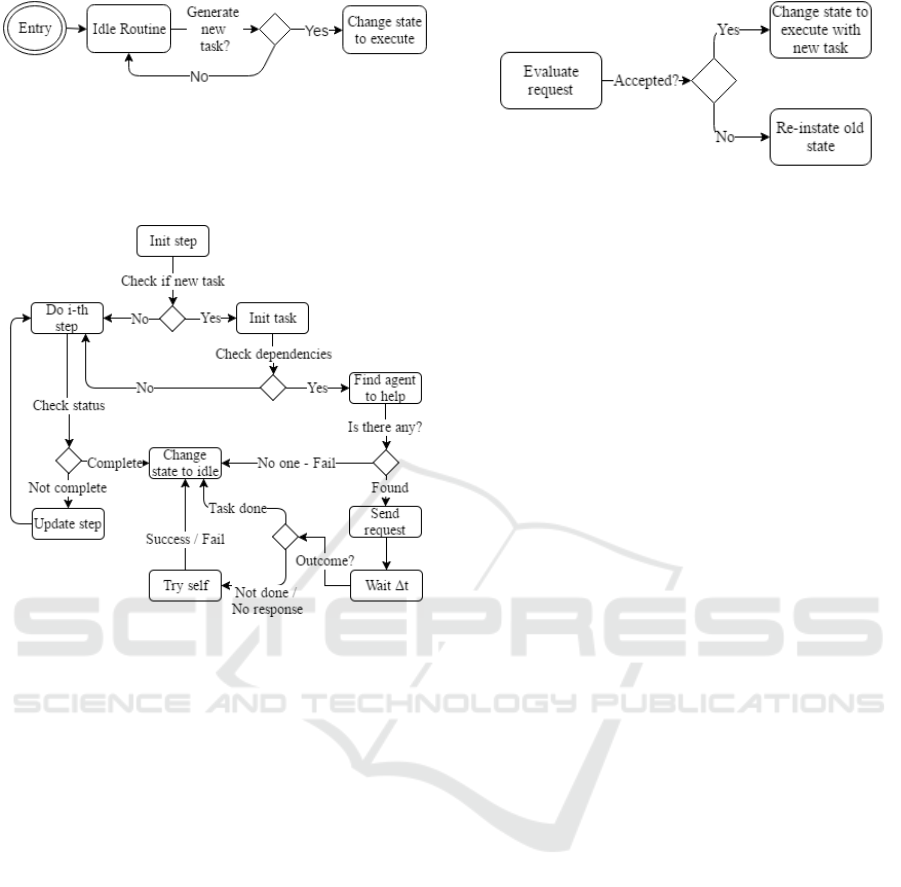
Figure 3: The agent starts its life-cycle in the idle state. It is
possible for the agent to decide starting the execution of a
task – in that case it will adapt to execute. Otherwise the
agent will remain in idle until it decides to start performing
a new task.
Figure 4: In the execute state the agent will perform all
execution steps related to the task. If a task can be
performed independently then the agent will execute the
iteration steps until it finishes and succeeds. If the task
cannot be done independently, the agent chooses whom to
ask for assistance and sends a request. The agent will wait
for a certain amount of time before giving up on getting
help. In such case it will try to achieve the task by itself with
a probability prob. Regardless of the outcome – success or
failure, the agent will go to idle.
As aforementioned, it is possible for an agent to
receive a request for assistance from another while
either being in idle or execute state. In this case the
agent will transition into the interact state (Figure 5),
and other tasks will be left on-hold. Whilst in this
state the agent cannot be interrupted – the process of
making a decision is an atomic one. It follows that
requests are processed one at a time. The agent
returns from the interact state with a decision of what
to do. It may either drop the past activitiy and pursue
the new task, or it discards the request and continues
where it left off. Such decision is made based on the
willingness to cooperate.
Figure 5: In the interact state the agent will evaluate the
request and based on its willingness to cooperate will
decide whether to accept it or not.
Agents keep a profile of one another, based on the
outcomes of past interactions (agents are not aware of
how they are profiled by others). Such profile
contains the following: the degree of perceived
helpfulness, a set of capabilities and respective
expertise. In this work, an agent A chooses to rely on
an agent B based on the latter’s perceived helpfulness.
Thereafter, it will wait for a finite amount of time for
B to respond. In case there is no response, A will do
the following: give up on B, update the corresponding
profile, and try to carry out the task itself with a low
success rate (Figure 4). It would also be reasonable
for A to first try by itself. It could also be that A, upon
giving up on B, chooses some other agent C to ask for
help. On the other hand, B keeps track of how good it
is doing at the moment of the request. In this paper, if
B concludes that it has dropped too many tasks –
explained further in Section 4.2 – then it will lower
its willingness to cooperate with A at that point. In the
opposite case, B will raise its cooperation level, thus
will become more inclined to help A.
3.1 Interactions Between Agents
Dependencies between agents can either arise with
time, or they can be known in advance. In the former
case, the agent might discover them either at the
beginning of the task, or while the task is in progress.
In order to increase their chance of a successful
outcome, i.e. task completion, the agents will need to
interact with each other. Agents can interact on
several levels, as follows:
Non-committal interaction. Agent A could
broadcast pieces of information it deems
important to other agents, i.e. its presence and
capabilities, and messages of the form ‘path x1
to x2 blocked’. Other agents could decide
whether or not to accept this broadcast. When
A sends such broadcasts it is not trying to
establish a dialogue with others around it.
Therefore, it does not expect any response or
commitment to the message. The other agents
could also evaluate how trustworthy agent A is,
Towards Collaborative Adaptive Autonomous Agents
81

based on the validity of its broadcasts.
Specifically, (i) is the information provided
useful, and (ii) is it true?
One-to-one dialogue. Agent A has knowledge
gaps. Consequently, it asks agent B for specific
information to address this issue. Also in this
case, agent A could evaluate the validity of the
responses of B, as in the non-committal
broadcast. In addition, the overall helpfulness
of B could also be estimated.
One-to-one delegation. Agent A asks agent B
to perform a task on which A depends on. It
could also be that agent A is still able to perform
its own task, however, with lower probability
of success. Agent B will evaluate the request
from agent A and decide whether it will adopt
it as its own. As in the previous cases, A can
also judge the behaviour of B, in terms of (i) the
overall helpfulness of B and (ii) the quality of
the outcome produced by B.
One-to-many dialogue/delegation. In this
case, a chain of one-to-one interaction emerges.
There is another way to understand the one-to-
many scenario. Agent A engages in interaction
with several other agents, at the same time over
the same task. This means that agent A can ask
from each agent a different subtask to be
performed, which will affect the success of its
own task.
Each case discussed above could refer to hard or
soft interdependencies as defined by Johnson et al.
(Johnson, et al., 2011). For instance, if the non-
committal broadcast contains an alarm message, then
it is vital to the well-being of the other agents. On the
other hand, if the message is the aforementioned ‘path
x1 to x2 blocked’, then disregarding it might delay
some mission without compromising its success. In
the same way it could be argued for all the other cases.
Differently from Barber et al. (Barber, et al.,
2000), in the present work an agent decides by itself
if it will aid another agent at any point in time.
Consequently, task delegation from an agent A to B,
first has to be accepted by B.
3.2 Agent Organization and Autonomy
An agent population could either be organized in a
hierarchy, or as peers. It might be possible for some
structure to emerge in the latter case, e.g. the most
successful agents go up in the ranks. Environmental
conditions could also be used to predict the best
hierarchy (Barber, et al., 2000). The type of
organization will influence how an agent’s autonomy
is affected by the interaction with other agents.
Let us assume an agent A which is a superior of
agent B, i.e. agent A has the power to delegate to B
any task it sees fit, e.g. task x
i
. In principle, A could
be fully capable of performing x
i
by itself. However,
in order to conserve its resources, it chooses to
delegate such task to B. There are two possibilities for
B. It either has no choice at all but to execute task x
i
,
or it might have some degree of independence to
refute doing x
i
, in case the task could have
catastrophic consequences that A has not foreseen. In
general, A can and will interfere in the agenda of B,
and B has to comply with A up to some degree.
Overall, B depends on the will of A.
When agents A and B are peers, A does not have
any authority over B. If during its lifetime agent A
depends on B for some tasks, then A will make a
request for assistance to B. Whether B decides to
intervene or not will depend on its willingness to
cooperate. Agent A will depend on the will of B. If B
has perceived A to be helpful in the past, then it might
be more difficult for B to reject the request from A. In
general a more willing agent might be easier to
interfere with. On the other hand, B might not be
driven by unselfish motives. It can in fact decide to
help A in order to make a better case for itself, should
it need the help of A in the future.
The relation of dependence is present in both
situations. Moreover, choosing to depend and
delegate always constitutes a risk (Castelfranchi and
Falcone, 1998). Even if A is the superior of B, by
delegating it depends on B. Even if A could perform
the task by itself, the failure of B will delay its own
success, i.e. if the outcome is expected at a certain
time, then the failure of B might entail the failure of
A. Also, if A is not able to do the task by itself, then it
will be even more dependent on B. As a result, the
changes of autonomy may become blurred. In this
paper, the agents are considered to be peers.
Consequently, when A asks B for assistance with
respect to a task x
i
, it is deciding to depend on B, and
thus it is lowering its autonomy over x
i
.
4 EXPERIMENT
4.1 Setup
In this paper the simulation model is tested against
values of dependency degrees and willingness to
cooperate (Δ), in order to investigate the utility of the
agent population. Utility is measured in terms of the
number of dependent tasks completed as a whole
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
82

(completion degree CD), and the total number of
unfinished tasks (dropout degree DD). The degree of
dependencies represents the percentage of tasks
which are dependent on other tasks in order to have a
higher chance of being completed – also referred to
as dependent tasks. The parameter Δ represents the
probability that an agent A will accept to help an agent
B, upon receiving a request from B.
In the simulation a task is defined by the following
characteristics: energy levels, reward, and
dependencies on other tasks, i.e. task x
i
depends on
task x
j
. This list is not exhaustive. An agent is
assumed to have a list of tasks it can perform, with
value mappings between each task and the
characteristics described. This abstraction could be
useful even if tasks are concretely defined. On every
run, each agent has the same set of tasks that it
provides. In every set, there are tasks that depend on
other tasks and tasks that the agent can perform alone.
In total there are 10 different tasks. More than one
agent can do each task. This is to ensure the diversity
of individuals with which an agent could interact.
In this experiment only two types of the
interactions discussed above are used: the non-
committal broadcast and the one-to-one delegation.
Agents make themselves and their list of tasks known
to each other through the non-committal broadcast.
One the other hand, they make requests to each other
through the one-to-one delegation. The Robot
Operating System (ROS) (Quigley, et al., 2009) is
used to simulate agents and their interaction through
services and publish/subscribe mechanisms. The one-
to-one delegation is implemented through ROS
services.
It is important to note that agents in the population
are not working to achieve the same set of goals, in
other words no global objective/goal is assumed.
Each agent has its own agenda; nevertheless, its
capabilities could be of use for other agents too.
Three sets of trials were conducted. A set of trials
is composed of 3 independent simulation runs for the
same population size (popsize), degree of
dependencies, and Δ. In the first set, simulations are
run for popsize = 10, alternatively popsize = 30, and
static Δ. The percentages of tasks that depend on other
tasks are in the segment [10%, 25%, 50%, 75%,
100%]. The parameter Δ is taken from the segment
[0.0, 0.25, 0.5, 0.75, 1.0].
These values capture different degrees of
dependencies and selfishness in the agent population.
The experiments were conducted for each
combination of Δ with each dependency degree.
The second set of trials is conducted with a
popsize = 10, and a finer resolution of the Δ segment:
[0.0, 0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, 0.9, 1.0]. The
segment for dependencies is the same as in the first
trial.
The third set of trials is conducted again with
popsize = 10, with a dynamic Δ that changes during
runtime on each interaction. Simulations are run for
several initial values of Δ, in the segment [0.0, 0.3 0.5,
0.7, 1.0]. Two cases are studied, only one agent has a
dynamic Δ, and all agents have dynamic Δ. The
segment for dependencies is the same as in the other
trials.
During any simulation, at a point in time t, agent
A might decide to do a task x
i
, or receive a request for
such task. In the case x
i
depends on some task x
j
, agent
A chooses whom to ask for assistance by consulting
its list of known agents. In the first steps of the
simulation the agent will make the selection
randomly. Consequently, it will either select the one
which it has perceived as more helpful in the past, or
randomly with a probability equal to 0.3. This value
is chosen arbitrarily in order to help the agent explore
its options. Agent A computes the perceived
helpfulness (PH) of some agent B, by comparing the
number of times it has gotten a response over the total
number of requests made to B (Equation 1):
PH =
Handled Requests
Total Requests
(1)
This is relevant because agent B, upon receiving
and adopting some other task, i.e. from C, will drop
the request of A and continue. After a time out, A
assumes that its request has been dropped. If B does
indeed perform x
j
, then A is considered to have
succeeded. Otherwise A will succeed by itself with
prob = 0.3.
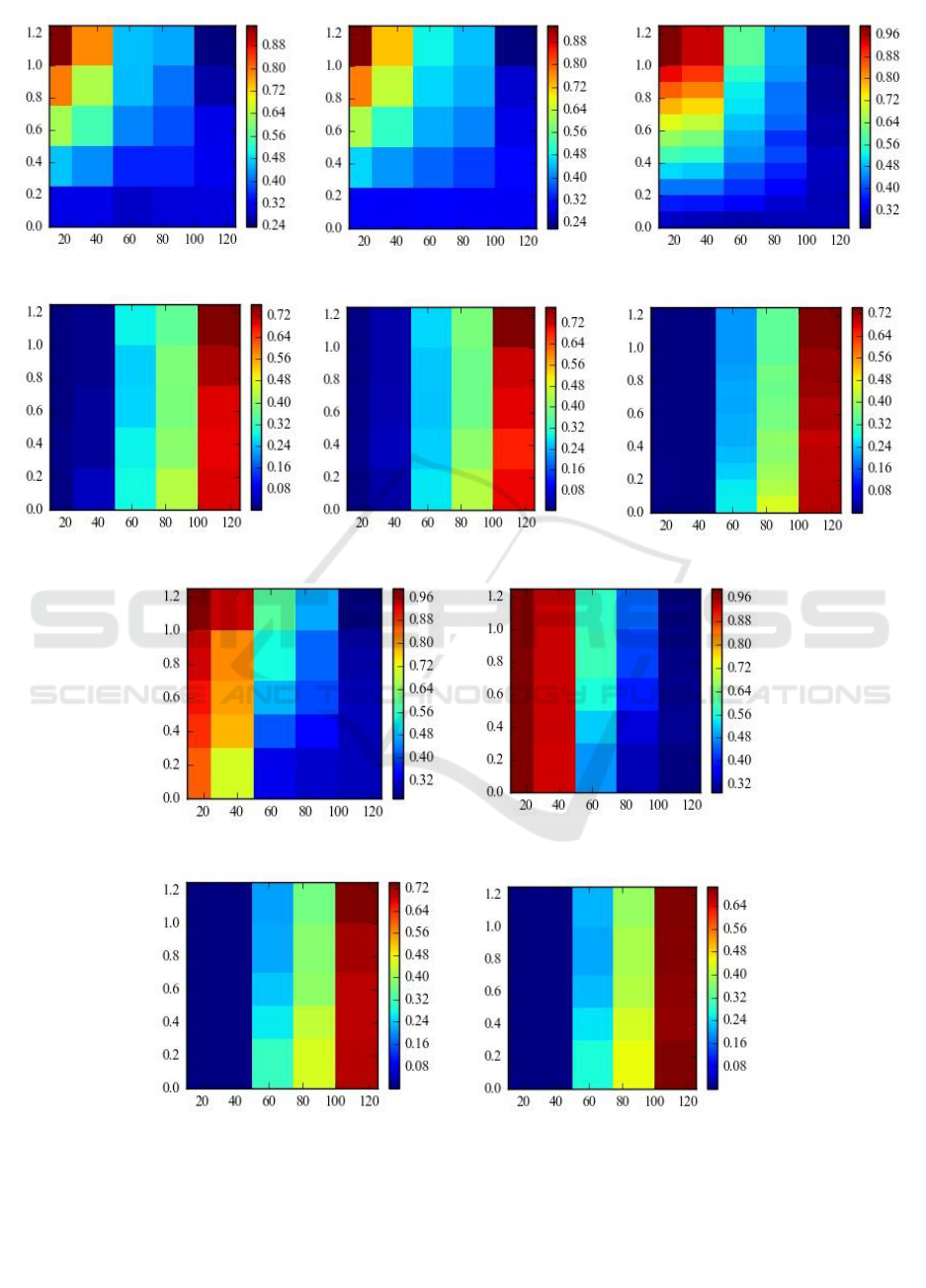
4.2 Results
The simulation results, visualized as heat maps, show
how the utility measures relate to the dependency
degree and willingness to cooperate (Figures 6a-6h).
The x-axis represents the degree of dependency
expressed in percentage, whereas the y-axis
represents the willingness to cooperate. The colour
represents the degree of completed dependent tasks
averaged over 3 trials. The completion degree (CD)
for each agent is calculated as seen in Equation 2:
CD =
Depend Tasks Completed
Depend Tasks Attempted
(2)
On the other hand, the dropout degree (DD) for each
agent is calculated in Equation 3:
Towards Collaborative Adaptive Autonomous Agents
83
(a)
(b)
(d)
(e)
(c)
(f)
(i)
(j)
(g)
(h)
Figure 6: Heat maps of CD and DD utility measures, for simulations with static Δ and dynamic Δ, and different popsize. (colors
on the blue side of the spectrum represent low values, whilst the ones on the red side represent high values) (a) CD for popsize =
10 with static Δ. (b) CD for popsize = 30 with static Δ. (c) CD for popsize = 10 with finer resolution of static Δ. (d) DD for popsize
= 10 with static Δ. (e) DD for popsize = 30 with static Δ. (f) DD for popsize = 10 with finer resolution of static Δ. (g) CD for
popsize = 10, one agent with dynamic Δ. (h) CD for popsize = 10, all agents with dynamic Δ. (i) DD for popsize = 10, one agent
with dynamic Δ. (j) DD for popsize = 10, all agents with dynamic Δ.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
84
DD =
Tasks not Completed
Tasks Attempted
(3)
The heat maps show the values for CD and DD,
each summed over all the agents. The outcomes of the
first set of trials are depicted in Figures 6a, 6b, 6d and
6e. In the case of low dependency degrees, agents
with low Δ complete circa 0.3 of the dependent tasks,
whereas those with higher Δ complete noticeably
more with no relevant impact on DD. Results from
the initial tests seem not dependent on popsize with
respect to CD (Figures 6a and 6b) and DD (Figures
6c and 6d), thus popsize = 10 was used in the
succeeding simulations. The utility measures are
calculated through Equations 2 and 3.
The outcomes of the second set of trials are given
in Figures 6c and 6f. The results using a finer
resolution for Δ are consistent with the first set of
trials.
In the case of dynamic Δ (third set of trials), in the
y-axis its initial values are shown, Δ
init
(Figures 6g-
6j). It is observable how the agent population
accomplishes more tasks – CD increases – for lower
dependency degrees due to dynamic Δ. There is a
noticeable difference between the results for static Δ
and results for both cases with dynamic Δ: only one
agent with dynamic Δ (Figures 6g and 6i) and all
agents with dynamic Δ (Figures 6h and 6j). Moreover,
the benefit of having all agents with dynamic Δ is
observable. On the other hand, the value of DD
increases in all cases with static and dynamic Δ, due
to the increase of dependency degree. In the case the
latter is 100%, all tasks depend on each other.
Consequently, the value of CD is approximately
equal to prob.
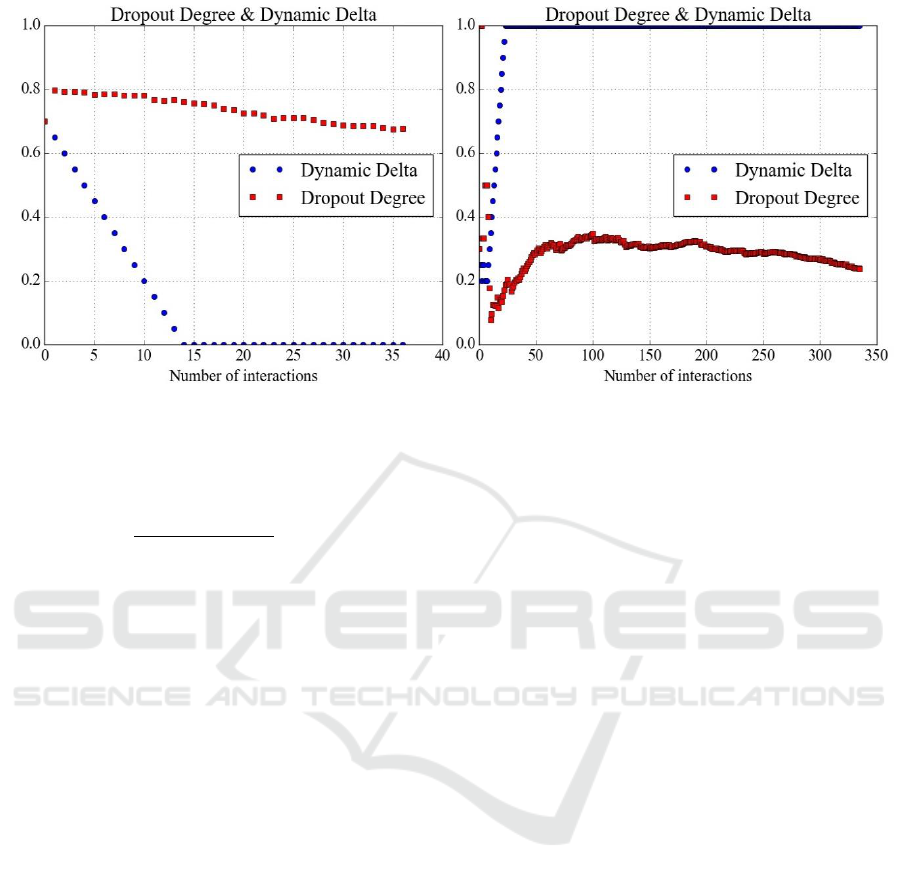
Changes of Δ for an agent with respect to the DD
shows that adaptation of behaviour takes place
(Figures 7a and 7b). In this specific experiment, two
thresholds are considered, θ
low
= 0.3, and θ
high
= 0.7.
If the value of DD is higher than θ
high
, then the agent
will decrease its Δ with a Δ
step
= 0.05. If it is lower
than θ
low
, the agent will increase its Δ with the same
Δ
step
= 0.05. If the value of DD is between θ
low
and
θ
high
, the agent will compare the current value with the
one before last. In case the difference in absolute
value is bigger than 0.01 the agent will update Δ. The
value of Δ will increase if the value of DD has gone
down, and decrease otherwise.
5 DISCUSSION
In this paper, the willingness to cooperate is used to
model adaptive autonomy. An agent that asks for
assistance is attempting to establish a dependency
relation. The agent that accepts to give assistance
establishes such a relation. The results show how the
willingness to cooperate influences the utility of a
population of agents. It is clear that selfish agents, as
defined here, will only be as succesful as their
individual potential allows them (Figures 6a-6c). On
the other hand, unselfish agents can improve group
utility up to a certain point. For low dependency
(a)
(b)
Figure 7: Simulations under different conditions of dependency degree and different Δ
init
show that (a) for Δ
init
= 0.7 and
dependency degree = 75% the agent becomes more selfish, (b) whereas for Δ
init
= 0.3 and dependency degree = 50% the agent
becomes less selfish.
Towards Collaborative Adaptive Autonomous Agents
85

degrees, they achieve more dependent tasks without
compromising the dropout degree. When the
dependencies become quite complex, due to the
increase of tasks that require assistance, their utility
degrades. In the latter case it seems quite reasonable
to act more selfishly and rely more on oneself (Figure
7a). On the other hand, if one agent can afford to
assist then it can adapt its behavior to that end (Figure
7b). A dynamic willingness to cooperate captures
these shifts in behavior. As shown by the results in
Section 4.2 (Figure 6g), even one agent with dynamic
degree of willingness to help is able to positively
impact the whole population.
In the simulations, the dropout degree served as a
regulator. Agents were continuously keeping track of
how many tasks they were concluding (each agent for
itself) and based on that value their behavior adapted.
Consequently, dependency relations are established
with agents in need, based on current circumstances.
In other research areas, this kind of parameter is
used to model risk tolerance (Cardoso and Oliveira,
2009). Agents which are representatives of business
entities, are spawned with different willingness to
sign contracts with other entities – the latter might be
subject to fines. Fines are considered punishment for
undesired behavior. The higher the fines, the higher
the risk is of signing a contract with an agent.
On a different note, the dependency degree was
kept fixed during a single run of the simulations.
Therefore, it can be assumed that the dependencies
are known in advance. However, this might not
always be the case, because dependencies could also
arise during the agent’s lifespan. In principle, the
model presented in this work does not make any
restrictions for how dependencies should be.
Future research will be concerned with the further
development of the agent model, and the
establishment of an agent framework.
Firstly, the model will be expanded to include a
willingness to ask for assistance which changes
depending on the agent’s chance of success if it would
attempt the task by itself. As a result, autonomy will
be shaped by both the willingness to cooperate and
willingness to ask for assistance.
Secondly, the factors which should influence
these parameters such as: health, reward, hierarchy,
and trust, need to be taken into account. A general
definition considers trust in terms of how much an
agent will want to depend on another (Jøsang, et al.,
2007). Integration of this dimension with the current
model will aid the agents to make better choices about
whom to give assistance, and whom to ask for it. The
presence of a hierarchy, also creates interesting
scenarios. As an example, in which cases should an
agent obey its superior? The case in which the
superior sends wrong information continuously is
tackled by Vecht et al. (Vecht et al., 2009), which
results in the agent taking more initiative. Additional
scenarios could include a superior which is in conflict
with agents of a higher rank than itself, or a superior
which asks the agent to do tasks associated with low
reward, thus not exploiting the agent’s full capacity.
Lastly, the model will also be expanded to include
two more auxiliary states, which are regenerative and
out_of_order. The agent can go to out_of_order from
any other state. If the agent attempts by itself to
recover it will change its state to regenerative. In the
case it does indeed recover it will go to idle and
continue normal operation, otherwise it will return to
out_of_order.
ACKNOWLEDGEMENTS
The research leading to the presented results has been
undertaken within the research profile DPAC –
Dependable Platforms for Autonomous Systems and
Control project, funded by the Swedish Knowledge
Foundation (the second and the third authors). In part
it is also funded by the Erasmus Mundus scheme
EUROWEB+ (the first author).
REFERENCES
Barber, S. K., Goel, A., Martin, C. E. (2000). Dynamic
adaptive autonomy in multi-agent systems. Journal of
Experimental \& Theoretical Artificial Intelligence,
12(2), 129-147.
Barnes, M. J., Chen, J. Y., Jentsch, F. (2015). Designing for
Mixed-Initiative Interactions between Human and
Autonomous Systems in Complex Environments. IEEE
International Conference on Systems, Man, and
Cybernetics (SMC).
Bradshaw, J. M., Jung, H., Kulkarni, S., Johnson, M.,
Feltovich, P., Allen, J., Bunch et al. (2005). Kaa:
policy-based explorations of a richer model for
adjustable autonomy. Proceedings of the fourth
international joint conference on Autonomous agents
and multiagent systems. ACM.
Brookshire, J., Singh, S., Simmons, R. (2004). Preliminary
results in sliding autonomy for coordinated teams.
Proceedings of The 2004 Spring Symposium Series.
Cardoso, H. L., Oliveira, E. (2009). Adaptive deterrence
sanctions in a normative framework. Proceedings of the
2009 IEEE/WIC/ACM International Joint Conference
on Web Intelligence and Intelligent Agent Technology-
Volume 02.
Castelfranchi, C. (2000). Founding agents' "autonomy" on
dependence theory. ECAI.
ICAART 2017 - 9th International Conference on Agents and Artificial Intelligence
86

Castelfranchi, C., Falcone, R. (1998). Principles of trust for
MAS: Cognitive anatomy, social importance, and
quantification. Multi Agent Systems, 1998.
Proceedings. International Conference on. IEEE.
Fong, T., Thorpe, C., Baur, C. (2001). Collaborative
control: A robot-centric model for vehicle
teleoperation. Carnegie Mellon University, The
Robotics Institute.
Hardin, B., Goodrich, M. A. (2009). On using mixed-
initiative control: a perspective for managing large-
scale robotic teams. Proceedings of the 4th ACM/IEEE
international conference on Human robot interaction.
Johnson, M., Bradshaw, J. M., Feltovich, P. J., Jonker, C.
M., Van Riemsdijk, B., Sierhuis, M. (2011). The
fundamental principle of coactive design:
Interdependence must shape autonomy. Coordination,
organizations, institutions, and norms in agent systems
VI.
Jøsang, A., Ismail, R., Boyd, C. (2007). A survey of trust
and reputation systems for online service provision.
Decision support systems 43.2, (pp. 618-644).
Parasuraman, R., Sheridan, T. B., Wickens, C. D. (2000). A
model for types and levels of human interaction with
automation. IEEE Transactions on systems, man, and
cybernetics-Part A: Systems and Humans.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., . . . Ng, A. Y. (2009). ROS: an open-source
Robot Operating System. ICRA workshop on open
source software.
Schurr, N., Marecki, J., Tambe, M. (2009). Improving
adjustable autonomy strategies for time-critical
domains. Proceedings of The 8th International
Conference on Autonomous Agents and Multiagent
Systems-Volume 1.
Vecht, B. v., Dignum, F., Meyer, J. C. (2009). Autonomy
and coordination: Controlling external influences on
decision making. IEEE/WIC/ACM International Joint
Conferences on Web Intelligence and Intelligent Agent
Technologies, 2009. WI-IAT'09.
Towards Collaborative Adaptive Autonomous Agents
87
