
RGB-D and Thermal Sensor Fusion
Application in Person Tracking
Ignacio Rocco Spremolla
1,2∗
, Michel Antunes
1
, Djamila Aouada
1
and Bj
¨
orn Ottersten
1
1
Interdisciplinary Centre for Security, Reliability and Trust, University of Luxembourg, Luxembourg City, Luxembourg
2
ENS Cachan, Universit
´
e Paris-Saclay, Paris, France
Keywords:
Sensor Fusion, RGB-D, Thermal Sensing, Person Tracking.
Abstract:
Many systems combine RGB cameras with other sensor modalities for fusing visual data with complementary
environmental information in order to achieve improved sensing capabilities. This article explores the possi-
bility of fusing a commodity RGB-D camera and a thermal sensor. We show that using traditional methods, it
is possible to accurately calibrate the complete system and register the three RGB-D-T data sources. We pro-
pose a simple person tracking algorithm based on particle filters, and show how to combine the mapped pixel
information from the RGB-D-T data. Furthermore, we use depth information to adaptively scale the tracked
target area when radial displacements from the camera occur. Experimental results provide evidence that this
allows for a significant tracking performance improvement in situations with large radial displacements, when
compared to using only a tracker based on RGB or RGB-T data.
1 INTRODUCTION
There are many applications that make simultaneous
use of visual data and other sensing modalities. In
the past few years, extensive research has been car-
ried out for fusing RGB and Depth sensors (RGB-
D). A non-exhaustive list of examples where this type
of multi-modal systems are employed include human
pose estimation (Shotton et al., 2011), action recog-
nition (Vemulapalli et al., 2014), simultaneous local-
ization and mapping (Endres et al., 2012), and people
tracking (Luber et al., 2011). Combining RGB and
thermal sensors (RGB-T) has been investigated to a
lesser extent, and mainly used for robust person track-
ing (Stolkin et al., 2012; Kumar et al., 2014).
Currently, approaches that combine the three sen-
sor modalities discussed previously are being inves-
tigated (Mogelmose et al., 2013; Vidas et al., 2013;
Nakagawa et al., 2014; Matsumoto et al., 2015; Sus-
perregi et al., 2013). Each modality supports a partic-
ular capability: depth sensors provide real-time and
robust 3D scene structure information; RGB cameras
provide rich visual information; and thermal sensors
allow to compute discriminative temperature signa-
tures. In this paper, we pursue this line of work, and
extend the RGB-T fusion scheme presented in (Talha
∗
The totality of this work was performed while the au-
thor was an intern at SnT, University of Luxembourg.
and Stolkin, 2012) to RGB-D-T. We present a cali-
bration pipeline (intrinsics and extrinsics) that allows
to fuse the information acquired by the different sen-
sor modalities, and propose a person tracking algo-
rithm based on RGB-D-T data. Experimental results
provide evidence that combining the three modalities
for the purpose of people tracking using a traditional
particle filter based framework is more robust when
compared to using only a single or pairs of sensors.
1.1 Contributions
A common problem when fusing the data captured
with multiple sensor modalities is to find the corre-
sponding regions between the data. In this paper, we
address this problem and present a pipeline for the
intrinsic and extrinsic calibration of all the sensors
(RGB, D and T). This allows to generate registered
RGB, depth and thermal images, which have a one-
to-one pixel correspondence. From the best of our
knowledge, using such mapped data for the purpose
of person tracking has not been addressed before.
Moreover, this data registration process is not partic-
ular to the followed tracking approach, and could be
applied as a pre-processing step for other tracking al-
gorithms as well.
Furthermore, we present a simple scheme based
on a particle filter for fusing the RGB-D-T data for the
612
Spremolla, I., Antunes, M., Aouada, D. and Ottersten, B.
RGB-D and Thermal Sensor Fusion - Application in Person Tracking.
DOI: 10.5220/0005717706100617
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 612-619
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

purpose of person tracking. Compared to the previous
work based on RGB-T data only (Talha and Stolkin,
2012), we use the additional depth information in two
different ways: 1) in computing additional descriptors
extracted from the depth data; and 2) in continuously
adapting the tracked target size with an appropriate
scaling factor (adaptive scaling), yielding increased
robustness to radial motion.
1.2 Organization
This paper is organized as follows: in the next sec-
tion, we briefly discuss the most relevant works that
use RGB, RGB-D, RGB-T or RGB-D-T data for the
purpose of object or people tracking. In Section 3, we
present the experimental setup, the calibration pro-
cedure, and the process of image registration. Sec-
tion 4 discusses the theory behind the proposed per-
son tracking algorithm, and how we take advantage
of the different sensor modalities. Finally, Section 5
presents the experimental results, where the tracking
accuracy using RGB-D-T is evaluated with respect to
using only RGB or RGB-T.
2 RELATED WORK
This section briefly reviews the most relevant works
that use RGB, RGB-D, RGB-T or RGB-D-T data for
tracking purposes.
In the past, extensive work has been done in ob-
ject tracking from RGB video sequences (P
´
erez et al.,
2002; Nummiaro et al., 2002; Nummiaro et al., 2003).
More recently, with the popularization of RGB-D sen-
sors, objects or people trackers based RGB-D data
have started to be studied. In practice, the use of
depth sensors makes the process more robust against
illumination changes at a lower computational cost,
and the provided 3D structure information simplifies
many tasks such as background subtraction and ob-
ject segmentation. Choi et al. (Choi and Christensen,
2013) describe a system for detecting people from im-
age and depth sensors on board of a robot, where de-
tection algorithms using the two different sources of
information are fused using a sampling based method.
Choi and Christensen (Choi and Christensen, 2013)
present a particle filtering approach for object pose
tracking, where the likelihood of each particle is eval-
uated using features extracted from RGB and D data.
Going one step further, Jafari et al. (Jafari et al., 2014)
present a multi-person detection and tracking system
suitable for mobile robots and head-worn cameras.
The authors use an extended Kalman filter framework
and use different types of algorithms for extracting
relevant information from the multi-modal data (e.g.
3D point classification, visual odometry, RGB based
sliding window pedestrian detection).
There are also multi-modal systems based on
RGB-T data for tracking applications. Stolkin et
al. (Stolkin et al., 2012) present a Bayesian fusion
method for combining pixel information from thermal
imaging and conventional colour cameras for tracking
a moving target. Very recently, Kumar et al. (Kumar
et al., 2014) integrate a low-resolution thermal sensor
with an RGB camera into a single system. The basic
idea is to apply an RGB tracker and use the thermal
information for eliminating a variety of false detec-
tions. Talha and Stolin (Talha and Stolkin, 2012) em-
ploy a particle filter tracking approach that fuses both
sources of data, and adaptively weights the different
imaging modalities based on a new discriminability
cue.
Only very recently, RGB-D-T based systems have
started to be used. Some applications include person
re-identification (Mogelmose et al., 2013), and 3D
temperature visualization (Vidas et al., 2013; Naka-
gawa et al., 2014; Matsumoto et al., 2015). From the
best of our knowledge, there is only one work that
fuses RGB-D-T data for people tracking and follow-
ing (Susperregi et al., 2013). The algorithm is based
on a particle filter for merging the information pro-
vided by the different sensors, which includes also a
Laser Rangefinder. The overall pipeline includes spe-
cial detectors, such as an emergency-vest and a leg de-
tector. Our aim is different in the sense that we want
to fuse the multi-modal RGB-D-T data following a
low-level strategy, not requiring application specific
high-level reasoning, such as special environment or
target based detectors.
Our work extends the previously discussed frame-
work (Talha and Stolkin, 2012) for the case of RGB-
D-T data, where the additional depth information pro-
vides additional cues that, as evaluated experimen-
tally in Section 5, shows to be very effective for the
purpose of person detection and tracking.
3 EXPERIMENTAL SETUP
This section briefly introduces the experimental setup
we used to acquire and map RGB-D-T data.
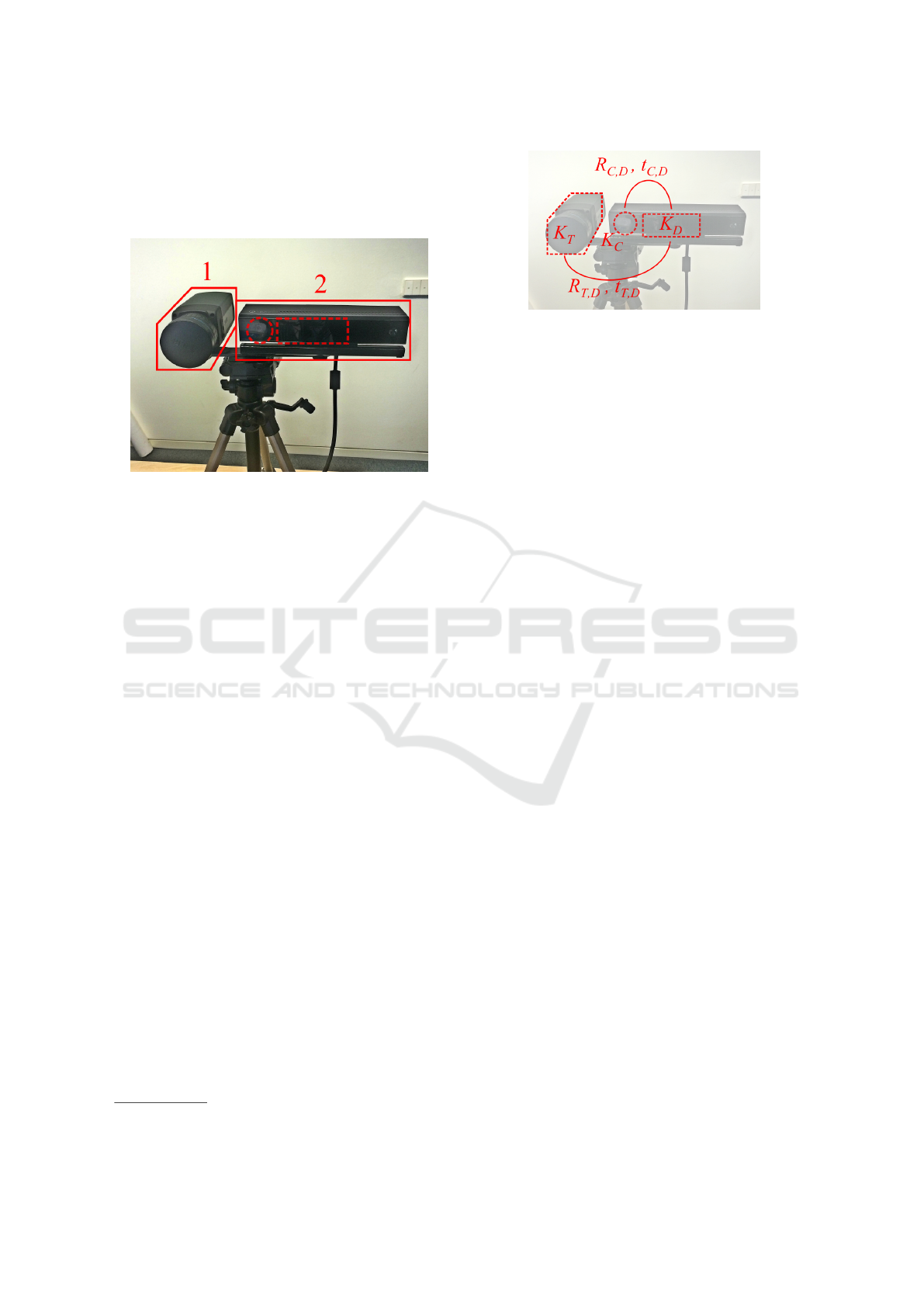
The hardware used for this research was a Mi-
crosoft Kinect v2 RGB-D sensor, and a FLIR A655sc
Thermal camera. The two sensors were positioned
side-by-side using a rigid support, as depicted in Fig.
1. Using this setup, the following image data is ac-
quired:
• RGB or colour image (C): 1920×1080 pixels at
RGB-D and Thermal Sensor Fusion - Application in Person Tracking
613
30 fps
1
,
• Depth/IR image (D): 512×424 pixels at 30 fps,
• Thermal image (T): 640×480 pixels at 50 fps.
Figure 1: The setup: 1. FLIR A655sc thermal camera, 2.
Microsoft Kinect v2 RGB-D sensor (dashed circle: RGB
camera, dashed rectangle: ToF depth/IR sensor).
In order to fuse the data captured by each sensor,
two steps are required: sensor calibration and image
registration. These steps will be explained in the fol-
lowing sections.
3.1 System Calibration
System calibration is required in order to find the
transformation of 3D points to image points in each
camera. This transformation involves two steps, the
determination of the pin-hole camera model param-
eter matrix K (intrinsic calibration) and the estima-
tion of the relative sensor poses [R,t](extrinsic cali-
bration).
Before we move on, it is important to mention
that the depth stream from the Kinect v2 comes from
a time-of-flight camera that produces an additional
IR stream from the amplitude information. As the
two streams come from the same sensor, we call it
the Depth/IR sensor. Although we do not use the IR
stream for tracking purposes, we do use it for calibrat-
ing the sensor. This IR stream does not contain any
thermal information, and should not to be confused
with the stream coming from the thermal camera.
The cameras are calibrated using the well-known
toolbox of Bouguet (Bouguet, 2004). The following
steps are performed:
• Intrinsic calibration of the RGB camera using a
checkerboard pattern, obtaining its intrinsic ma-
trix K
C
,
1
fps: frame per second.
Figure 2: The intrinsic and extrinsic calibration parameters.
• Intrinsic calibration of the Depth/IR sensor using
a checkerboard pattern, obtaining its intrinsic ma-
trix K
D
,
• Intrinsic calibration of the Thermal camera using
a disjoint squares pattern, obtaining its intrinsic
matrix K
T
,
• Computation of the relative pose of the RGB cam-
era with respect to the Depth/IR sensor using a
checkerboard pattern, obtaining the transforma-
tions [R
C,D
,t
C,D
],
• Computation of the relative pose of the Thermal
camera with respect to the Depth/IR sensor using
a disjoint squares pattern, obtaining the transfor-
mations [R
T,D
,t
T,D
].
The computed calibration parameters and trans-
formations are illustrated in Figure 2. Note that
the depth camera frame is used as the reference
frame to extrinsically calibrate the RGB and the ther-
mal cameras. In the calibration steps involving the
RGB and/or the Depth/IR cameras, a standard pa-
per checkerboard pattern was used, as it is visible in
both modalities. However, for the calibration steps
involving the thermal camera, a disjoint-squares pat-
tern with cut-out squares and placed against a thermal
backdrop was employed, as previously done in (Vidas
et al., 2012).
3.2 Image Registration
In order to find the corresponding regions in the dif-
ferent image modalities, we perform a registration
process on the raw images from the different sen-
sors to generate registered C, T and D images having
pixel-to-pixel correspondence. This is accomplished
by computing a 3D point cloud from the depth image,
and then projecting each 3D point to the RGB and
Thermal images to assign to it a colour and thermal
intensity. These points are then re-projected to the
depth image plane, obtaining two new images: one
with the corresponding RGB colour information, and
the other with the corresponding thermal intensities.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
614

(a) Color image (RGB data) (b) Thermal image (T data) (c) Depth image (D data)
Figure 3: Registered images with pixel-to-pixel correspondence.
The final registered images, having pixel-to-pixel cor-
respondences are shown in Figure 3
The advantage of using this strategy is that the reg-
istered set of images simplifies the subsequent fusion
step, and the pixel-to-pixel correspondence persists,
even when the target has significant radial motion. It
is important to note, however, that some pixels are
marked as invalid in the final images (e.g. red points
in Figure 3(a)), corresponding to pixels that are out-
of-range or detected as being occluded in at least one
of the cameras. These unassigned pixels are discarded
when computing the descriptors for tracking.
4 RGB-D-T BASED PERSON
TRACKING
This section describes the tracking algorithm which
we applied with the RGB-D-T system presented in the
previous section, for the purpose of person tracking.
In order to assess the advantages of the RGB-D-T
system, we employ a simple particle filter approach,
and avoid using specific motion models and com-
plex particle re-sampling strategies based on previous
frames.
For each frame, the probability distribution of the
target is estimated using a discrete set of N parti-
cles, where the impact of each particle i is appropri-
ately weighted using w
i
. Each particle i is defined
by its centre position (p
i
x
, p
i
y
), and its foreground re-
gion width and height (p
i
w
, p
i
h
), respectively. It also
encodes a local background region, defined between
the foreground region, and an outer rectangular region
of dimensions (λp
w
,λp
h
), where λ is a user defined
constant. A particle example is shown in Figure 4.
The estimated target state, or the tracker output
for each frame, is computed by weighting the particle
features:
p
α
=
N
∑
i=1
p
i
α
w
i
,
Figure 4: Each particle is defined by the parameters
p
x
, p
y
, p
w
, p
h
of the foreground region ( f g), and by a back-
ground region (bg).
where p
α
corresponds to any of the parameters
p
x
, p
y
, p
w
, p
h
.
4.1 Data Descriptors
For each particle and for each image modality, the
foreground and background regions are used for com-
puting appropriate descriptors. As described next, we
use histogram based descriptors because they are fast
to compute, and exhibit some invariance to rotations,
partial occlusions and moderate non-rigid deforma-
tions (Nummiaro et al., 2002).
RGB based Descriptor. For the colour modality,
we convert the RGB image to a normalized colour-
space which we will denote by rgb, where r = R/(R+
G + B), g = G/(R + G + B), and b = B/(R + G +
B). The colour normalization discards the illumina-
tion information for achieving robustness to lighting
changes. Since two components are enough for char-
acterizing the normalized colour space (r +g+b = 1),
we compute a 2D histogram H
C
using the pair (r,g).
D based Descriptor. For the depth modality, we
first compute a 3D normal vector for each data point
RGB-D and Thermal Sensor Fusion - Application in Person Tracking
615

by fitting a 3D plane to a pre-defined local neighbour-
hood. A 2D histogram H
D
is then computed using
the corresponding polar angle θ and azimuthal angle
ϕ information.
T based Descriptor. For the thermal modality,
we compute a 1D histogram H
T
using directly the
intensity values of the thermal image.
All the three descriptors are computed for the
manually-selected target region in the first frame of
the sequence, and defined as being the target model
{H
t
C
,H
t
D
,H
t
T
}. The size of the target region (t
w
,t
h
)
and its mean depth t
d
are also stored and later used
for constructing appropriate particle hypotheses. Re-
mark that the target model is not relearned along the
sequence.
For each particle hypothesis, the three descriptors
are computed using the corresponding foreground re-
gion, obtaining {H
f g
C
,H
f g
D
,H
f g
T
}. Additionally, the
same descriptors are also computed for the particle
background, obtaining {H
bg
C
,H
bg
D
,H
bg
T
}.
A usual measure for the comparison of two his-
tograms p = {p
(i)
}
n
i=1
and q = {q
(i)
}
n
i=1
of n bins, is
the Bhattacharyya similarity coefficient B[p,q] (Num-
miaro et al., 2003):
B[p, q] =
n
∑
i=1
q
p
(i)
q
(i)
We employ it for the comparison of particle
and target histograms. Each particle foreground
descriptor is compared against the correspond tar-
get model descriptor, obtaining three coefficients
{B
f g,t
C
,B
f g,t
D
,B
f g,t
T
} for the colour, depth and thermal
data, respectively. By computing these coefficients,
we are comparing the particle foreground descriptors
with the target model, and are able to assess its simi-
larity. Next, the same histogram comparison approach
is used for analysing the particle background descrip-
tors and the target model, obtaining three coefficients
{B
bg,t
C
,B
bg,t
D
,B
bg,t
T
}. These coefficients are used as-
sessing how similar the background is to the target
model, which is called the level of camouflaging of
that particular particle.
4.2 Multi-modal Fusion
In order to fuse the information from the different
modalities and determine the overall appropriateness
of each particle, we extend the RGB-D based method
presented in (Talha and Stolkin, 2012) to RGB-D-
T data. The idea is to compute an enhanced Bhat-
tacharyya coefficient B
f
, which combines the param-
eters B
f g,t
C
, B
f g,t
D
and B
f g,t
T
in a way such that less
weight is given to modalities where camouflaging oc-
curs. The computation of B
f
is done as follows:
B
f
= αB
f g,t
C
+ β B
f g,t
T
+ γ B
f g,t
D
,
where
α =
B
bg,t
T
+ B
bg,t
D
2(B
bg,t
C
+ B
bg,t
T
+ B
bg,t
D
)
,
β =
B
bg,t
C
+ B
bg,t
D
2(B
bg,t
C
+ B
bg,t
T
+ B
bg,t
D
)
,
and γ =
B
bg,t
C
+ B
bg,t
T
2(B
bg,t
C
+ B
bg,t
T
+ B
bg,t
D
)
.
By doing so, we are essentially computing a weighted
average of B
f g,t
T
, B
f g,t
C
and B
f g,t
D
using adaptive
weights that depend on the camouflaging of the com-
plementary modalities. This ensures the desired effect
of reducing the importance of modalities that could
increase the uncertainty of the estimation approach.
Regarding the particle weight assignment, we first
apply an exponential function on B
f
, with the aim of
stretching the range of values
ˆw = e
−(1−B
f
)/(2σ
2
)
,
where σ = 0.2 is an empirical constant. The final
weight w
i
of the ith particle is computed by normaliz-
ing ˆw
i
by the sum of the weights over the N particles:
w
i
=
ˆw
i
∑
N
j=1
ˆw
j
.
4.3 Adaptive Target Scale
In many tracking applications, the tracked objects do
not present significant radial distance changes with
respect to the camera reference frame when com-
pared to their lateral displacements. This produces the
“size” of the tracked object to remain approximately
constant along the tracking sequence.
In this work, we tried to address the problem of
tracked objects at a short range from the camera, and
which can present significant radial motion. In order
to address this issue, we used the depth information
to adjust the width and height of the particle window.
This is achieved by extracting an image section from
the depth image around each particle centre using the
previous particle size (p
w
, p
h
). Then, a histogram is
computed using the depth values from this region, and
the particle depth centre p
d
is estimated by determin-
ing the position of the mode of the histogram. Finally,
the particle size
p
w
=t
w
s,
p
h
=t
h
s,
(1)
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
616
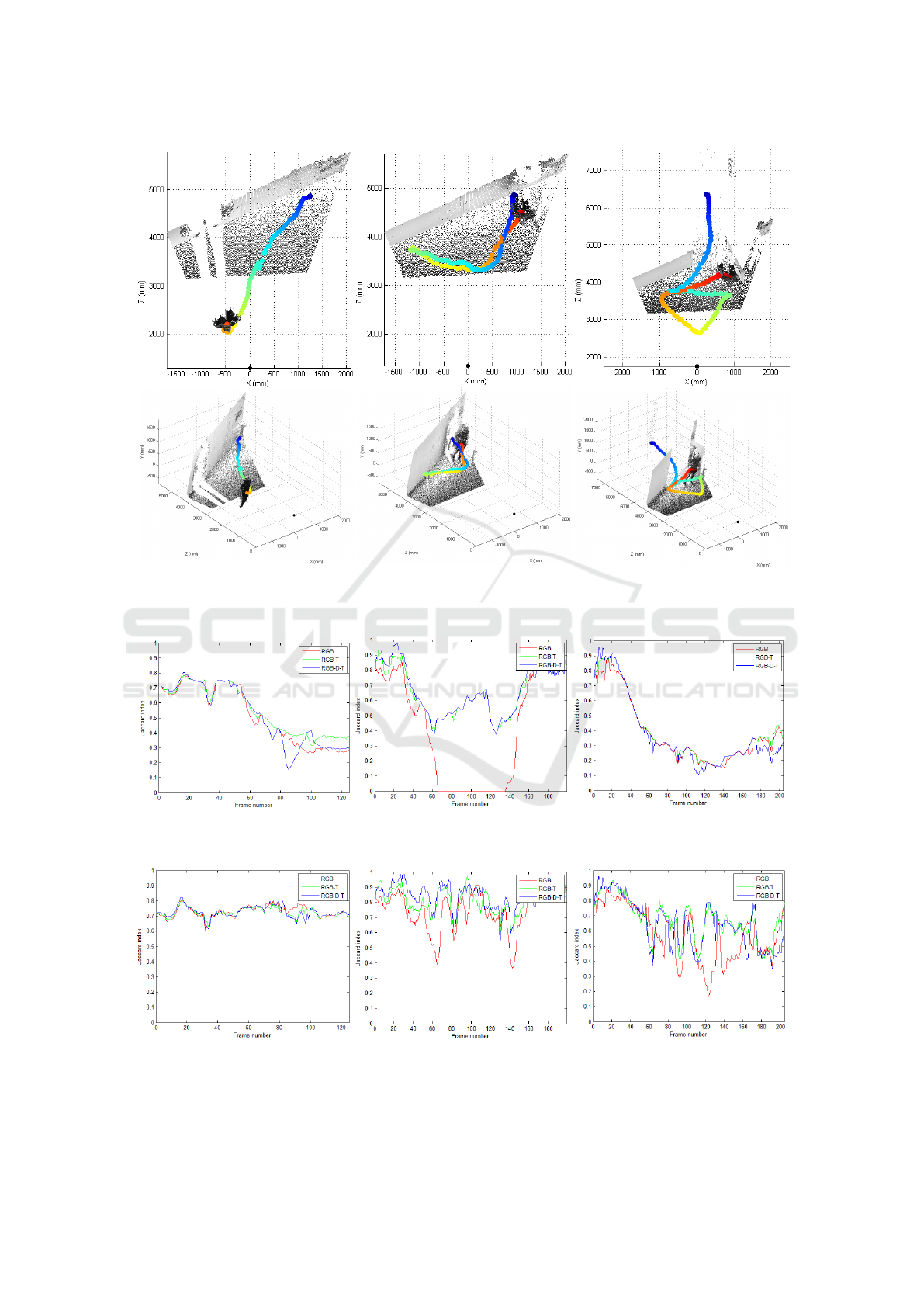
(a) Sequence 1
(b) Sequence 2
(c) Sequence 3
Figure 5: Trajectories of the different sequences: the colouring from blue to red is used for identifying different time instants
(blue - start, red - finish); the black dot represents the camera position. Top: top view; bottom: perspective view.
(a) Sequence 1 (b) Sequence 2 (c) Sequence 3
Figure 6: Tracking accuracy - Constant target size.
(a) Sequence 1 (b) Sequence 2 (c) Sequence 3
Figure 7: Tracking accuracy - With adaptive scaling.
RGB-D and Thermal Sensor Fusion - Application in Person Tracking
617
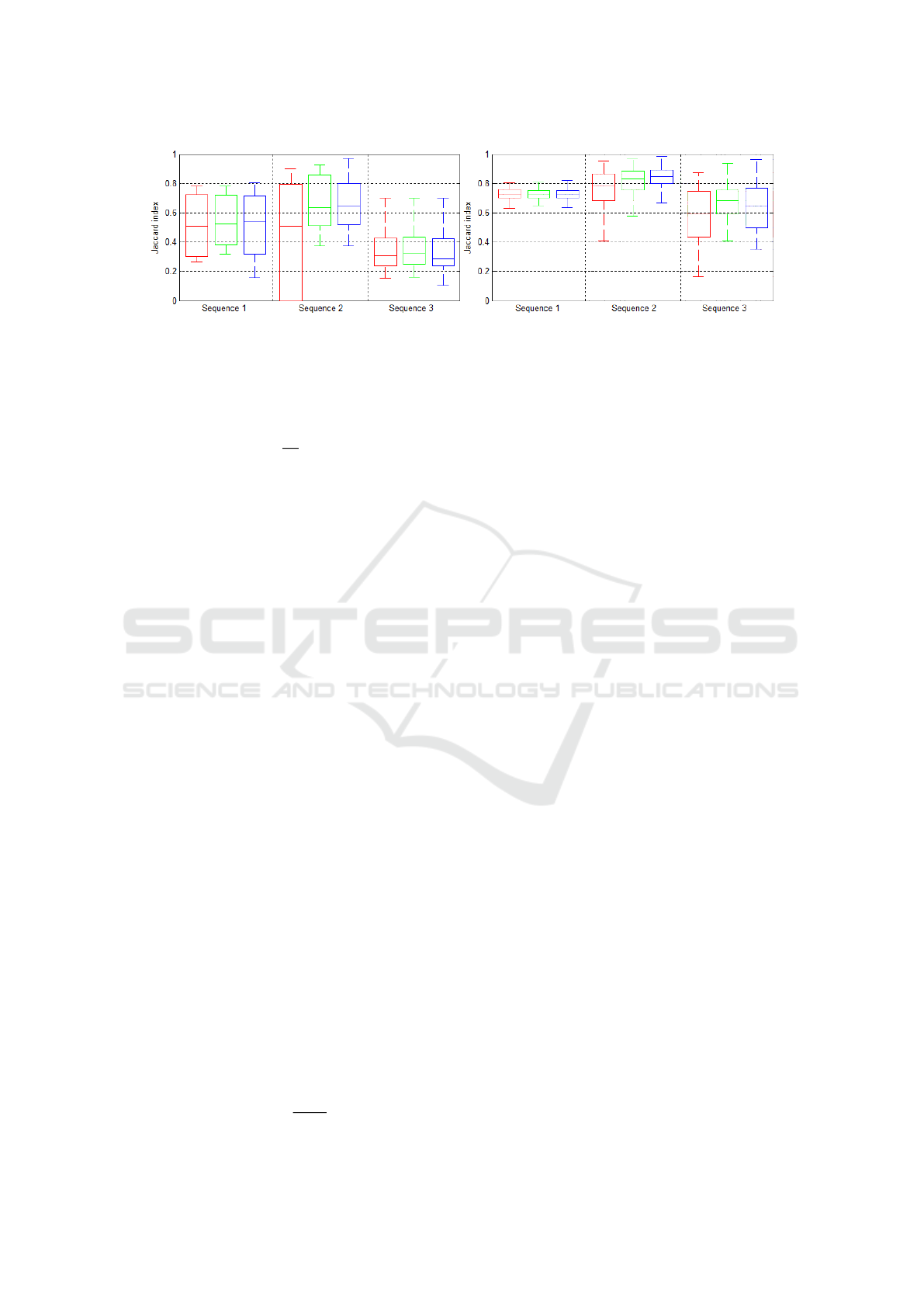
(a) Constant target size scaling (b) With adaptive scaling
Figure 8: Tracking accuracy - Red: RGB, green: RGB-T, blue: RGB-D-T.
is adjusted by scaling the target size (t
w
,t
h
) using a
scale-factor s, based on the depth-ratio between the
target size and depth
s =
t
d
p
d
. (2)
5 EXPERIMENTAL EVALUATION
For the experimental evaluation, we use three video
sequences of a person moving in an indoor scene,
which are composed of about 200 frames each, and
were taken at 20fps. All the sequences include signif-
icant radial motion.
The first sequence corresponds to a person per-
forming a diagonal motion, going from the far right
to the near left of the scene. The trajectory described
by the person can be observed in Figure 5(a). In the
second sequence, the person moves closer and farther
from the camera twice, and the returns to the origi-
nal position. The trajectory is shown in Figure 5(b).
Finally, in the third sequence, the person is initially
positioned at a large distance from the camera setup
(≈ 6.3m), and then performs a sequence of fast move-
ments around the room (including jumps). This tra-
jectory can be observed in Figure 5(c).
5.1 Evaluation
For the evaluation of the proposed tracking algorithm,
ground-truth data was generated for the three video
sequences. For this, a human operator manually se-
lected a rectangular region covering the tracked per-
son from head to feet and shoulder width, for one ev-
ery five frames of each video. The parameters for the
intermediate frames were then linearly interpolated.
Regarding the tracking quality, we decided to use
a measure that considers the area of overlap between
the ground-truth target region and the tracked region.
For this, the Jaccard index was selected:
J(A,B) =
A ∩ B
A ∪ B
.
From the definition, we can see that the Jaccard index
is bounded between 0 and 1, where 0 corresponds to
completely disjoint regions (no overlap), and 1 cor-
responds to identical regions (perfect overlap). This
measure is widely used in the literature, e.g. in (Ev-
eringham et al., 2010) for object category recognition
and detection.
5.2 Results
For each video, three different sensor combinations
were considered: RGB, RGB-T and RGB-D-T. More-
over, for each of these options, two runs were con-
ducted: one using constant window size, and another
one using adaptive window size scaling as described
in Section 4.3.
For each case, the Jaccard index of the tracked re-
gion against the ground-truth region was computed.
The results can be observed in Figures 6 and 7, while
in Figure 8 the mean Jaccard index values are shown.
As expected, the accuracy is considerable low
when using constant target sizes due to the radial mo-
tion of the person moving in the scene. The combi-
nations RGB-T and RGB-D-T show superior perfor-
mance when compared to the single RGB modality.
For the case where adaptive scaling is used, we
can see that the three sensing combinations have con-
siderably better performance in all the sequences.
Note that this is only possible in a multi-modal frame-
work where depth data is available. Furthermore, the
descriptors based on RGB-D-T show slight overall ac-
curacy improvements when compared to the other ap-
proaches.
6 CONCLUSIONS
We have investigated the problem of fusing the data
captured by a low-cost RGB-D camera with a ther-
mal sensor. We showed how to completely calibrate
the multi-modal system, and proposed a simple per-
son tracking algorithm using mapped RGB-D-T data.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
618

By using the depth data to adaptively scale the target
size, we proved that the tracker can resist to signifi-
cant radial motions with good accuracy based on the
Jaccard index. Moreover, we presented a simple way
to extend the RGB-T tracker presented in (Talha and
Stolkin, 2012) to RGB-D-T, by using a histogram of
3D normals as depth descriptor. Although the depth
feature we used did not significantly improve the ac-
curacy of the tracker in the tested video sequences,
we believe it could improve its robustness in other
more complicated sequences involving the interaction
of several persons.
In this work, we modelled the target model using
a single histogram for each data source. An inter-
esting extension would be to use a multi-part model,
and investigate how to efficiently compute histogram
descriptors for each target using part specific fusion
schemes. Finally, we the usage of a depth descriptor
based on local shape information such as curvature
distributions, instead of 3D normals, could add addi-
tional robustness to human deformations.
REFERENCES
Bouguet, J.-Y. (2004). Camera calibration toolbox for mat-
lab.
Choi, C. and Christensen, H. I. (2013). Rgb-d object track-
ing: A particle filter approach on gpu. In Intelligent
Robots and Systems (IROS), 2013 IEEE/RSJ Interna-
tional Conference on, pages 1084–1091. IEEE.
Endres, F., Hess, J., Engelhard, N., Sturm, J., Cremers, D.,
and Burgard, W. (2012). An evaluation of the rgb-
d slam system. In Robotics and Automation (ICRA),
2012 IEEE International Conference on.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88(2):303–338.
Jafari, O. H., Mitzel, D., and Leibe, B. (2014). Real-time
rgb-d based people detection and tracking for mobile
robots and head-worn cameras. In Robotics and Au-
tomation (ICRA), 2014 IEEE International Confer-
ence on, pages 5636–5643. IEEE.
Kumar, S., Marks, T. K., and Jones, M. (2014). Improv-
ing person tracking using an inexpensive thermal in-
frared sensor. In Computer Vision and Pattern Recog-
nition Workshops (CVPRW), 2014 IEEE Conference
on, pages 217–224. IEEE.
Luber, M., Spinello, L., and Arras, K. O. (2011). People
tracking in rgb-d data with on-line boosted target mod-
els. In Proc. of The International Conference on Intel-
ligent Robots and Systems (IROS).
Matsumoto, K., Nakagawa, W., Saito, H., Sugimoto, M.,
Shibata, T., and Yachida, S. (2015). Ar visual-
ization of thermal 3d model by hand-held cameras.
In Proceedings of the 10th International Conference
on Computer Vision Theory and Applications, pages
480–487.
Mogelmose, A., Bahnsen, C., Moeslund, T. B., Clap
´
es,
A., and Escalera, S. (2013). Tri-modal person re-
identification with rgb, depth and thermal features. In
Computer Vision and Pattern Recognition Workshops
(CVPRW), 2013 IEEE Conference on, pages 301–307.
IEEE.
Nakagawa, W., Matsumoto, K., de Sorbier, F., Sugimoto,
M., Saito, H., Senda, S., Shibata, T., and Iketani,
A. (2014). Visualization of temperature change us-
ing rgb-d camera and thermal camera. In Com-
puter Vision-ECCV 2014 Workshops, pages 386–400.
Springer.
Nummiaro, K., Koller-Meier, E., and Van Gool, L. (2002).
Object tracking with an adaptive color-based parti-
cle filter. In Pattern Recognition, pages 353–360.
Springer.
Nummiaro, K., Koller-Meier, E., and Van Gool, L. (2003).
An adaptive color-based particle filter. Image and vi-
sion computing, 21(1):99–110.
P
´
erez, P., Hue, C., Vermaak, J., and Gangnet, M. (2002).
Color-based probabilistic tracking. In Computer vi-
sionECCV 2002, pages 661–675. Springer.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2011).
Real-time human pose recognition in parts from sin-
gle depth images. In Proceedings of the 2011 IEEE
Conference on Computer Vision and Pattern Recogni-
tion.
Stolkin, R., Rees, D., Talha, M., and Florescu, I. (2012).
Bayesian fusion of thermal and visible spectra camera
data for region based tracking with rapid background
adaptation. In Multisensor Fusion and Integration for
Intelligent Systems (MFI), 2012 IEEE Conference on,
pages 192–199. IEEE.
Susperregi, L., Mart
´
ınez-Otzeta, J. M., Ansuategui, A.,
Ibarguren, A., and Sierra, B. (2013). Rgb-d, laser and
thermal sensor fusion for people following in a mobile
robot. Int. J. Adv. Robot. Syst.
Talha, M. and Stolkin, R. (2012). Adaptive fusion of infra-
red and visible spectra camera data for particle filter
tracking of moving targets. In Sensors, 2012 IEEE,
pages 1–4. IEEE.
Vemulapalli, R., Arrate, F., and Chellappa, R. (2014). Hu-
man action recognition by representing 3d skeletons
as points in a lie group. In Computer Vision and Pat-
tern Recognition (CVPR), 2014 IEEE Conference on.
Vidas, S., Lakemond, R., Denman, S., Fookes, C., Sridha-
ran, S., and Wark, T. (2012). A mask-based approach
for the geometric calibration of thermal-infrared cam-
eras. Instrumentation and Measurement, IEEE Trans-
actions on, 61(6):1625–1635.
Vidas, S., Moghadam, P., and Bosse, M. (2013). 3d ther-
mal mapping of building interiors using an rgb-d and
thermal camera. In Robotics and Automation (ICRA),
2013 IEEE International Conference on, pages 2311–
2318. IEEE.
RGB-D and Thermal Sensor Fusion - Application in Person Tracking
619
