
Agent based Modelling and Simulation using State Machines
Ilias Sakellariou
Department of Applied Informatics, University of Macedonia, Egnatia 156, Thessaloniki, Greece
Keywords:
Agent Simulation Platforms, Agent Programming Languages, Crowd Simulation.
Abstract:
Although agent based modelling has drawn significant attention in the recent years, with a significant number
of simulation platforms proposed, the latter target usually relatively simple reactive agents. Thus, little has
been done toward enhancing the modelling capabilities of platforms with richer agent oriented programming
constructs that could potentially lead to the implementation of more sophisticated models. This paper presents
an extension to the TSTATES library that aims to support the implementation of state based intelligent agents
and a more complex example drawn from the pedestrian simulation domain that demonstrates the potential of
the library in programming complex agent systems.
1 INTRODUCTION
Agent based modelling and simulation has been ex-
tensively used as a technique to study complex emer-
gent social and biological phenomena and has set a
new trend in many areas, such as economics, biology,
psychology, traffic and transportation etc. (Davids-
son et al., 2007). This growing interest led to the
introduction of a large number of agent modelling
and simulation tools (Nikolai and Madey, 2009) (Al-
lan, 2010) that offer programming environments of
different complexity and different characteristics in
terms of programming language employed in mod-
elling, completeness w.r.t. documentation, tutorials,
ease of use, scalability, extensibility, etc.
NetLogo (Wilensky, 1999) is regarded as one of
the most complete and successful agent simulation
platforms (Railsback et al., 2006; Lytinen and Rails-
back, 2012), in the sense that it provides a sim-
ple domain specific language for agent programming,
an IDE, and the necessary experiment visualisation
tools for quick development of simulation user inter-
face. Although, excellent for “modelling social and
emergent phenomena”, i.e. agent based simulations
that consist of a large number of reactive agents, it
lacks the facilities to model easily more complex goal
oriented agent behaviours. This problem originally
was been addressed in (Sakellariou et al., 2008), that
presents an approach towards building higher level
communicating NetLogo agents, with goals and plans
and offers a framework for message exchange and a
simple mechanism for specifying persistent intentions
and beliefs, in a PRS like style.
A different approach was adopted in the
TSTATES (Turtle-States) domain specific language
(DSL) (Sakellariou, 2012), that supports the defini-
tion of agent behaviour participating in the simula-
tion through state machines, an approach similar to
those that have been mainly used in robotics (Kono-
lige, 1997) and RoboCup simulation teams (Loetzsch
et al., 2006). TSTATES provides a small and simple
domain specific language (DSL) on top of the Net-
Logo programming language and an execution layer
that allows users to encode and execute more sophis-
ticated agent models.
In the original work of TSTATES a number of
extensions were described. This paper deals with
some of these extensions and describes a more com-
plex simulation example using TSTATES, that aims
to show how the latter extends the NetLogo platform
applicability to a number of domains, consisting of
more sophisticated agents.
The rest of the paper is organised as follows: Sec-
tion 2 introduces the basic components of NetLogo,
and introduces the platforms terminology, necessary
for placing the rest of the paper in the right context.
Section 3 provides a description of the TSTATES li-
brary and the extensions implemented by presenting
its primitives through a motivating example. In sec-
tion 4 a more complete example of TSTATES to a
multi agent model concerning crowd simulation is
described. Section 5 presents the work reported in
the literature that is closely related to the current ap-
proach. Finally, section 6 concludes the paper and
270
Sakellariou I..
Agent based Modelling and Simulation using State Machines.
DOI: 10.5220/0004164802700279
In Proceedings of the 2nd International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2012),
pages 270-279
ISBN: 978-989-8565-20-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

discusses future extensions.
2 THE NETLOGO PLATFORM
The NetLogo platform is “a cross-platform multi-
agent programmable modelling environment”
(Wilensky, 1999) aiming to multi-agent systems’
simulation with a large number of agents. In any
NetLogo agent simulation, four entities participate:
• The Observer, that is responsible for simulation
initialisation and control.
• Patches, i.e. components of a user defined static
grid (world) that is a 2D or 3D world, which is in-
habited by turtles. Patches are useful in describing
environment behaviour, since they are capable of
interacting with other agents and executing code.
• Turtles that are agents that “live” and interact in
the world formed by patches. Turtles are organ-
ised in breeds, that are user defined groups shar-
ing some characteristics, such as shape, but most
importantly breed specific user defined variables
that hold the agents’ state.
• Links agents that “connect” two turtles repre-
senting usually a spatial/logical relation between
them.
Both patches, turtles and links carry their own in-
ternal state, stored in a set of system and user-defined
variables local to each agent. By introducing an ade-
quate number of patch variables, a sufficient descrip-
tion of complex environments can be achieved. The
definition of turtle specific variables allows the former
to carry their own state and facilitates the encoding of
complex behaviour.
Agent behaviour can be specified by the domain
specific NetLogo programming language, that has
a rather functional flavour and supports functions
(called reporters) and procedures. The language in-
cludes a large variety of primitives for turtles motion,
environment inspection, classic program control (ex.
branching), etc. NetLogo v5 introduced tasks, a sig-
nificant extension to the language, since through the
former the possibility to create code stored in a vari-
able to be executed at a later stage. Reasoning about
time is supported through ticks, that are controlled by
the observer, each tick corresponding to a discrete ex-
ecution step. Finally, the programming environment
offers simple GUI creation facilities that minimizes
the time required to develop a simulation. An exam-
ple of a model that can be built in it is shown in figure
1. The model shown is the “termites” model that will
serve in the following as the running example in order
to present the TSTATES DSL.
NetLogo can be an ideal platform for initial pro-
totyping and simulation of multi-agent systems, pro-
vided these systems have some spatial dimension and
consist of relatively simple agents that react to en-
vironment “events”. On the other hand, modelling
more sophisticated agents that exhibit more complex
behaviour, is a challenging task in the platform since
there are no language primitives aiming towards this
direction.
3 STATE MACHINES FOR
SPECIFYING BEHAVIOUR
The TSTATES DSL offers a set of primitives to spec-
ify turtle behaviour as a state machine, together with
an execution layer for directly executing these speci-
fications in NetLogo. The domain specific language
is tightly coupled with the platform’s own language,
thus allowing the developer to use all the language
primitives of the latter in an transparent way.
In the TSTATES library, a rather common form of
state machines is adopted, in which transitions from
a state, are labelled with a condition/action pair and
have the following form:
(State, Condition
1
) ⇒ (Action
1
, Next
State
1
)
. . .
(State, Condition
i
) ⇒ (Action
i
, Next
State
i
)
The library supports encoding in NetLogo transi-
tions like the above in the following form:
state <StateName>
# when <Condition 1> do <Action 1>
goto <Next_State 1>
...
# when <Condition i> do <Action i>
goto <Next_State i>
end-state
In the above, the keywords
state
and
end-state
signal the beginning and the end of a state defini-
tion and
<StateName>
is a string acting as the unique
name of the state. Each transition in a state begins
with the symbol
#
. The
when
,
do
and
goto
are the
keywords that specify a transition condition, an action
and the target state respectively.
A string representation of any valid logical expres-
sion of NetLogo reporters preceded by the keyword
when can act as a condition. Thus, model specific
agent “sensors” or platform defined reporters (NetL-
ogo has a large set of the latter) can be used to trigger
transitions. A number of special library conditions are
offered:
•
otherwise
, in the form of
otherwise do
<Action> goto <State>
, that always evaluates
to true.
AgentbasedModellingandSimulationusingStateMachines
271
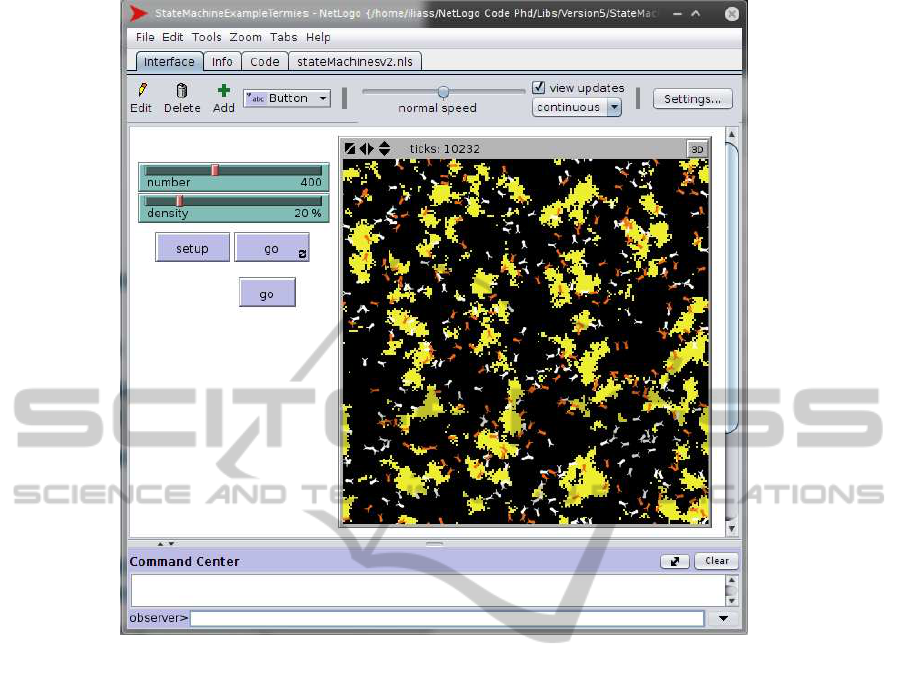
Figure 1: Termites Model. Yellow patches represent wood-chips, black patches free space, white “bugs” termites not carrying
anything, while orange “bugs” termites carrying a wood-chip. Example is taken from the NetLogo models library
•
for-n-ticks <n>
, which evaluates to true for n
ticks after the state was last entered. This was in-
troduced since it was discovered that it is often
required from an agent to perform an action for a
certain amount of time upon entering a state.
•
after-n-ticks <n>
, which constantly evaluates
to true n ticks after the last entry (activation) of the
state. It is useful to encode timeouts related to a
state activation.
• Finally, conditions
invoked-from <state>
,
previous-active-state <state>
,
on-failure <Machine>
and
on-success
<Machine>
are special conditions related to
machine invocation and will be discussed in
section 3.2.
Similarly to conditions, actions are string repre-
sentations of any valid NetLogo sequence of proce-
dures preceded by the keyword
do
. The special li-
brary action
``nothing''
can be employed to de-
fine transitions that are not labelled with an action.
This integration with the underlying platform, allows
a NetLogo user to easily define all the necessary com-
ponents of the agents in the model under study and
specify the behaviour of the agents using state ma-
chines. It also permits adaptation of existing NetL-
ogo models easily. Finally, it should be noted that
states (and machines as described later) can commu-
nicate information using the turtle’s own variables, as
for example is reported in (Konolige, 1997) as well
as through parameter passing of reporters and proce-
dures used in transition definition.
The keyword
goto
specifies the transition’s tar-
get state, one that belongs to the same state ma-
chine. There is also another kind of target state transi-
tion, that of invoking a different state machine, using
the
activate-machine
keyword that is discussed in
more detail in section 3.2. Two target pseudostates
exist
success
and
failure
that both represent final
states of the machine and have no transitions attached.
The execution layer evaluates transition condi-
tions in a state in the order that they appear, firing
the first transition in that list whose condition is sat-
isfied (triggered), i.e. imposing a transition ordering.
Prioritizing transitions based on their order allows be-
haviour encoding using less complex conditions, at
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
272

the cost of demanding special care from the user part
and allows conditions like
otherwise
to be semanti-
cally clear.
Finally, a state machine is a (NetLogo) list of state
definitions, with the first state in this list being the
initial state.
3.1 The Termites State Machine Model
To illustrate the use of TSTATES, a version of the
“State Machines” NetLogo library model (Wilensky,
1999) is employed in the following. The model is an
alternativeversion of the “Termites” model, originally
introduced to the platform to illustrate the use of the
new concept of tasks, and concerns an example drawn
from biology, i.e. simulation of termites gathering
wood chips into piles. Termite behaviour is governed
by simple rules: each termite wanders randomly until
it finds a wood chip, then picks up a chip and carries it
until it locates a clear space near another wood chip,
where it “drops” the chip its carrying. Eventually, all
chips initially scattered in the world are collected in
large piles. The state machine model of termites is
depicted in figure 2.
The corresponding TSTATES NetLogo code is
shown below.
to-report state-def-of-turtles
report (list
state "search-for-chip"
# when "pile-found" do "pick-up"
goto "find-new-pile"
# otherwise do "move-randomly"
goto "search-for-chip"
end-state
state "find-new-pile"
# for-n-ticks 20 do "fd 1"
goto "find-new-pile"
# when "pile-found" do "nothing"
goto "put-down-chip"
# otherwise do "move-randomly"
goto "find-new-pile"
end-state
state "put-down-chip"
# when "pcolor = black" do "drop-chip"
goto "get-away"
# otherwise do "move-randomly"
goto "put-down-chip"
end-state
state "get-away"
# for-n-ticks 20 do "fd 1" goto "get-away"
# when "pcolor = black" do "fd 1"
goto "search-for-chip"
# otherwise do "move-randomly"
goto "get-away"
end-state
)
end
The reader should notice the name of the NetL-
ogo reporter that “stores” the state machine indicates
the breed of agents whose behaviour is specified (i.e.
state-def-of-turtles
specifies the behaviour of
the “turtles” breed). In the model, chips are repre-
sented as yellow patches, where free space as black.
The conditions “pile-found”, corresponds to a simple
Netlogo reporter that returns true is the patch the tur-
tle is located on is coloured yellow. Obviously, this
could be easily achieved by simplyu including the
pcolor = yellow
as a condition, as in the case of
finding a free space (
pcolor = black
). It was cho-
sen to be included as a reporter in order to demon-
strate some aspects of the library and make the model
more readable. As seen from the above simple exam-
ple, encoding state machines in the proposed library
is a straightforward task. A comparison of the two
code examples (TSTATES and the original NetLogo)
can be found in the Appendix.
3.2 Invoking State Machines
Code re-usability is an important issue in any pro-
gramming language. Especially in the case of state
machines, it can significantly decrease the number
of states needed for encoding the agent behaviour.
The library supports the concept of callable state ma-
chines, i.e. state machines that can be invoked by
a transition from any state and terminate returning
a boolean result. The concept is similar to nested
functions, in the sense that when such a machine ter-
minates, “control” returns to the state that invoked
the machine. Each such callable state machine, has
to include at least a success or a
failure
pseu-
dostate to terminate its execution. Upon termina-
tion of execution, the calling state can optionally acti-
vate transitions on the result returned by the invoked
machine, by employing the special
on-success
<MachineName>
and
on-failure <MachineName>
transition conditions. It should be noted that before
the invocation of the callable machine both these con-
ditions evaluate to false. Machines are invoked using
the
activate-machine <MachineName>
and just as
ordinary programming functions, nested invocations
for machines can reach any level. The number of dif-
ferent machines that can be invoked from transitions
belonging to a single state is unlimited. The latter
presents one of the extensions introduced in this pa-
per, compared to the work described in (Sakellariou,
2012).
Additionally, two new conditions were introduced
to the library, increasing its expressivity:
• Condition
invoked-from <state>
, which eval-
uates to true if the state that invoked the current
AgentbasedModellingandSimulationusingStateMachines
273
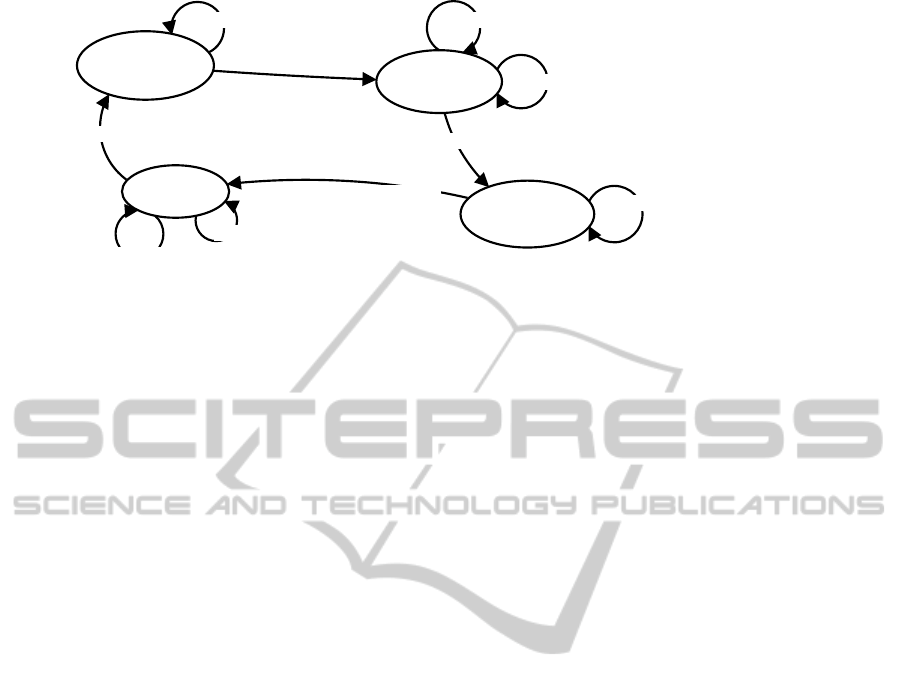
search-for-chip
find-new-pile
pile-found/pickup
otherwise/move-randomly for-n-ticks 20/ fd 1
put-down-chip
pile-found/nothing
otherwise/move-randomly
get-away
pcolor = black/drop-chip
otherwise/move-randomly
for-n-ticks 20/ fd 1
pcolor = black/fd 1
otherwise/move-randomly
Figure 2: The Termites State Machine Model. The transitions are labelled by a condition / action pair.
state is that stated in the parameter.
• Condition
previous-active-state <state>
,
which evaluates to true if the state
<state>
is ac-
tive (in stack).
Thus depending on the “calling” state the be-
haviour of the invoked machine can be differentiated.
This allows the introductionof more flexible state ma-
chines, enabling encoding of behaviours which differ
slightly depending on the calling state.
Callable states can significantly reduce the num-
ber of states of a machine and furthermore can pro-
vide the means to define templates, i.e. predetermined
agent behaviours that can be used with possibly minor
modifications in various contexts. One such charac-
teristic case, can be the Contract Net Protocol, where
the roles of the contractor and the manager could be
encoded as two independent state machines.
3.3 Implementation
The TSTATES library was implemented in the Net-
Logo programming language, to allow easy inclu-
sion in any Netlogo model, modification of the li-
brary primitives offered and transparent integration
with the underlying platform’s language. Its imple-
mentation depends on the notion of tasks and each
machine specification is transformed to an executable
form employing directly executable tasks by appro-
priate function invocations and stored in the corre-
sponding data structures.
The execution layer allows for one state transition
at a time. This is to ensure fairness in the simulation,
in which all agents get to perform one action at simu-
lation step. Additionally, such an approach allows the
use of ticks in the simulation.
4 UNDERGROUND STATION
SIMULATION
In order to demonstrate the implementation of more
complex agent behaviour, a model of an underground
station was developed. The example was drawn from
(Bandini et al., 2007), where authors use the Situated
Cellular Agent model to simulate crowd behaviour
while boarding and descending a metro wagon in an
underground station. The simulation environment is
depicted in figure 3(a), in which different areas are
annotated. Space is discrete, that is agents move on a
grid formed by the underlying patches, although con-
tinuous space could also be supported.
The simulation concerns a complete passenger cy-
cle, in the sense that the simulation models not only
the boarding but also the descending of passengers in
the wagon. This was done, since we wanted to inves-
tigate how boarding passengers affect the behaviour
of passengers descending the wagon, and in order to
have a richer state machine to encode.
Passenger behaviour is specified by a state ma-
chine, as the latter is depicted in figure 4. Informally
and rather briefly, each passenger:
• Upon entering the station, selects its closest door
and walks towards that target.
• When close to the door and doors open, boards
the wagon by selecting a door area (coloured red)
to walk towards. If there are any passengers de-
scending the passenger steps back to facilitate
their exit.
• When in the door area, selects a clear spot in the
wagon to move to. Upon arriving at the spot, the
passenger has completed boarding.
• If the passenger “sees” an empty seat, he/she tries
top get seated.
• After a while (determined differently for each pas-
senger), begins to descend from the wagon. This
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
274
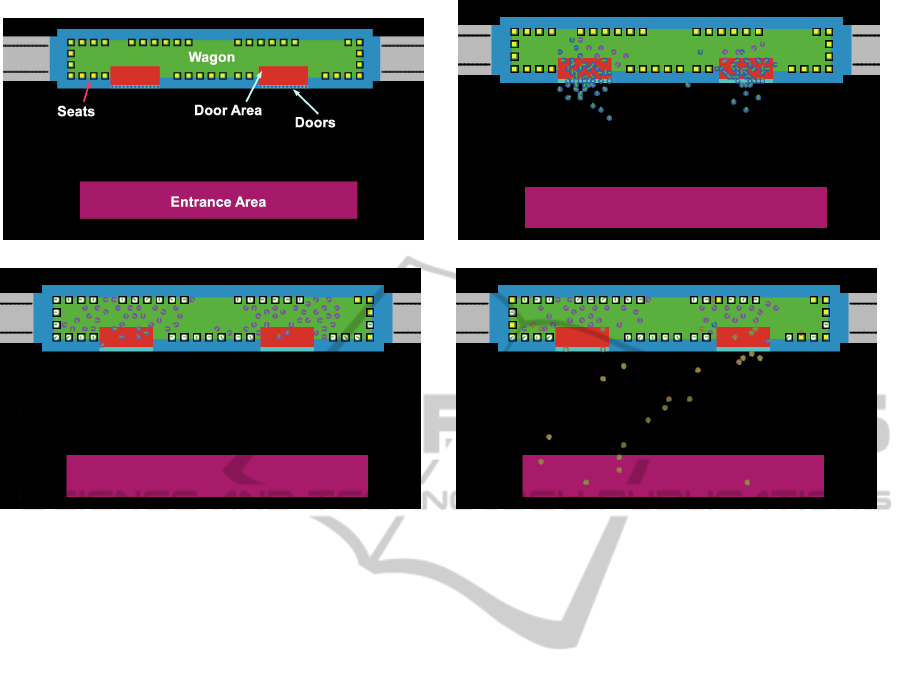
(a) Annotated environment. (b) Boarding.
(c) On board. (d) Descending.
Figure 3: The Underground Station Environment. Different areas are coloured coded: the entrance is marked with colour
magenta, the wagon area green, and the red coloured patches represent the door area.
involves selecting the nearest door area for un-
boarding and walks towards that door.
• When at the door area, the passenger selects an
exit, walks towards this new target and “leaves”
the simulation.
There is a number of interesting points in the state
diagram of figure 4. The first point to notice walk-
ing behaviour of the passenger is encoded as a sepa-
rate state machine (“walk-toward”) that is invoked by
each state requiring the passenger to move to a speci-
fied location. There are two things worth mentioning
here. Firstly, the state machine is called with two pa-
rameters, proximity and time. The first concerns how
close to the target should the agent be in order to con-
sider the task successful and the second concerns how
long the agent would try to achieve its goal of mov-
ing towards the target, before dropping its goal. Thus,
the TSTATES allows encoding of parametrised agent
plans and a form of intention persistence. Secondly,
the target location is communicated between states
through an agent (turtle) variable. The sole purpose
of this choice was to show that the tight integration of
TSTATES with the underlying platform; The same ef-
fect could have been easily done by having one more
parameter in the state machine. Both the above show
how TSATES allows for easy encoding of complex
agent behaviour.
A second point to notice concerns the “goto-door-
area” state machines. The latter encodes passenger
behaviour when moving to the door area, an inter-
mediate target during boarding and descending the
wagon. The behaviour is differentiated in the two
cases mentioned: if the passenger is boarding, then
he must step back to allow other passengers to de-
scend (a polite passenger); if not this behaviour does
not occur. This differentiation is achieved by having
a transition guarded by a condition that check which
state invokedthe “goto-door-area”machine, as shown
in the code below (numbered (1)):
state "select-door-area"
# when "invoked-from "waiting"
and any? passengers-descenting"
do "step-back" goto "select-door-area" (1)
# when "at-door" do "nothing" success
# when "any? entry-points"
do "select-entry-point"
activate-machine "walk-toward near 15"
# otherwise do "face closest-door"
goto "select-door-area"
end-state
Finally, it should be noted that the “goto-door-
area” invokes the “walk-towards” in order the pas-
senger reaches its selected target. Thus, as shown
from the example above, TSTATES can indeed meet
most of the needs such complex agent simulations de-
mand. Results of the simulation can be viewed in fig-
AgentbasedModellingandSimulationusingStateMachines
275
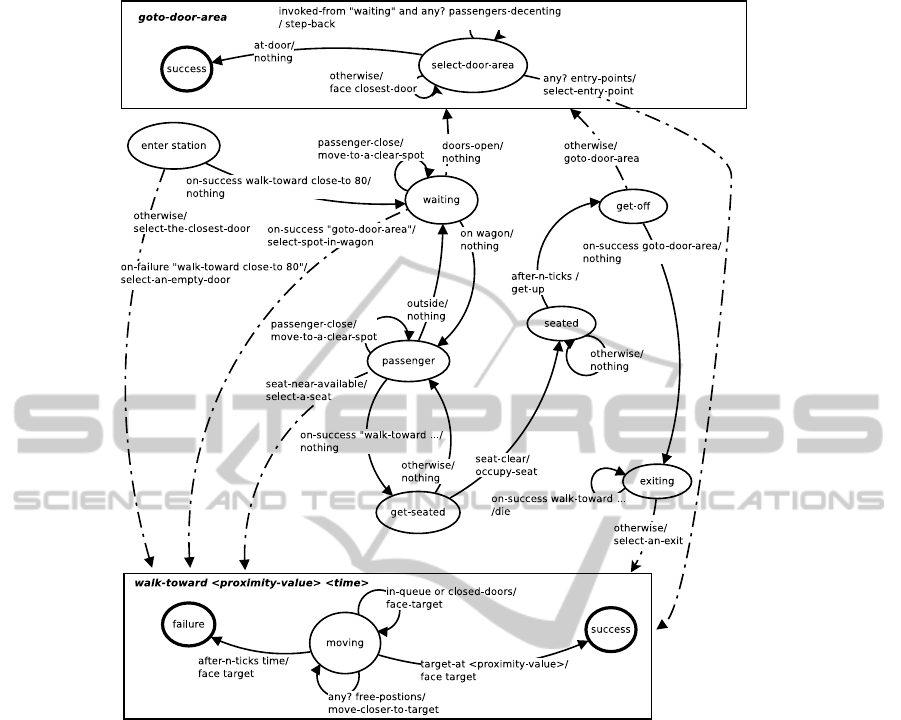
Figure 4: State Diagram of the Passenger. Please not that dotted arrows indicate machine invocations, where normal arrows
simple state transition.
ures 3(b), 3(c) and 3(d), corresponding to passengers
boarding, on-board and descending from the wagon.
5 RELATED WORK
The work described in this paper relates both to state
machine specification of intelligent agents and pro-
gramming languages for agent simulation platforms.
Thus, in the following we report on the relevant liter-
ature on both these research areas.
Many approaches reported in the literature adopt
finite state machines to control agent behaviour. For
example in (Loetzsch et al., 2006) (Risler and von
Stryk, 2008) authors describe a specification lan-
guage, XABSL for defining hierarchies of state ma-
chines for the definition of complex agent behaviours
in dynamic environments. According to the approach,
options, i.e. state machines, are organised through
successive invocations (one option state can invoke
another option) in a hierarchy, an acyclic graph con-
sisting of options, with the leaf nodes being basic be-
haviours (actions). Traversal of the tree based on ex-
ternal events, state transition conditions and past op-
tion activations, leads to a leaf node that is an action.
It should be noted that XABSL was employed by the
German RoboCup robot soccer team with significant
success.
COLBERT (Konolige, 1997) is an elegant C like
language defining hierarchical concurrent state ma-
chines. COLBERT supports execution of activities
(i.e. finite state automata) that run concurrently
possibly invoking other activities and communicate
through a global store or signals. Agent (robot) ac-
tions include robot actions and state changes, and all
agent state information is recorded in the Saphira per-
ceptual space.
eXAT (Stefano and Santoro, 2005), models tasks
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
276

of the agent using state machines, that can be ”acti-
vated” by the rule engine of the agent. eXAT tasks
can be combined sequentially or concurrently, allow-
ing re-usability of the defined state machines. Fork
and join operators on concurrent state machine exe-
cution exist that allow composition of complex tasks.
TSTATES provides some of the above mentioned
features and lacks others. State machine invocation
is possible through the
activate-machine
primitive,
but concurrent execution of state machines, as that is
defined in COLBERT and XABSL is missing. Concur-
rent actions, although is clearly a desired property in
a robotic system that operates in the real world, might
not be that suitable for agent simulation platforms and
especially for NetLogo. In the latter, fairness among
agents in the simulation is provided by ensuring that
at each cycle one action is selected and executed in
the environment. However, having multiple concur-
rent active states is a future direction of the TSTATES
library, possibly incorporating some sort of priority
annotation on the actions that would allow in the end
to have a single action as the outcome of the state ma-
chine.
There is a large number of agent simulation plat-
forms that have been developed in the past decade
(Nikolai and Madey, 2009) (Allan, 2010). Out of
these, state machine like behaviour encoding is of-
fered in two of them, Sesam (Kl¨ugl et al., 2006)
and RePast (North et al., 2007). In Sesam a vi-
sual approach to modelling agents is adopted, where
users develop activities that are organised in using
UML-like activity diagrams. RePast offers agent be-
havioural modelling through flowcharts (along with
JAVA, Groovy and ReLogo) that allow the user to vi-
sually organise tasks. While both approaches are sim-
ilar to the TSTATES, the latter offers callable states
and machine invocation history that, to our opinion,
facilitate the development of sophisticated models,
as presented above. Furthermore its tight integration
with the NetLogo platform and given the latter’s sim-
plicity in building simulations, allows users to build
models more easily. However, since among some user
categories, visual development of state machines is a
rather attractive feature, we consider the inclusion of
such a facility in the future.
6 CONCLUSIONS AND
DISCUSSION
This work reports on extensions regarding the
TSTATES DSL and on the use of the latter in a more
complex example. The approach presents a num-
ber of benefits: determining complex behaviour using
state transitions is simple and integration with Net-
Logo platform’s language primitives is transparent,
thus loosing not expressivity w.r.t. the agent models
that can be encoded.
We intend to extend the current approach in a
number of ways:
• Support the execution of concurrent active states
as discussed in section 5 and possibly fork and
join composition operators on machine invoca-
tion. However, this is a issue that requires further
research and outside the scope of this paper.
• Provide facilities for debugging and authoring
state machines in NetLogo, as for example vi-
sual tools to encode state machines, like in (Kl¨ugl
et al., 2006) and (North et al., 2007). The latter
we expect to increase the adoption of TSTATES
and the platform itself.
We are also considering other agent program-
ming language paradigms as well, such as AgentS-
peak(L) (Rao and Georgeff, 1991). However, these
approaches usually require the definition of an event
queue from which an event is selected and the corre-
sponding rule fires. In the case of NetLogo, such an
approach presents a number of problems: since the
agent is allowed to monitor a large number of global
variables, own variables and the environment around
it through a large set of language primitives (reporters
and procedures), it might be the case that the event
queue list grows to a size that makes its manipulation
inefficient. Thus, state machine oriented approaches
allow to focus on a smaller set of changes in the world
and consequently lead to a more efficient execution.
Finally, it should be noted that both the library
TSTATES and the examples presented in this paper,
can be found at http://users.uom.gr/∼ iliass/.
REFERENCES
Allan, R. J. (2010). Survey of agent based modelling and
simulation tools. Technical Report DL-TR-2010-007,
DL Technical Reports.
Bandini, S., Federici, M. L., and Vizzari, G. (2007). Situ-
ated cellular agents approach to crowd modeling and
simulation. Cybernetics and Systems, 38(7):729–753.
Davidsson, P., Holmgren, J., Kyhlbck, H., Mengistu, D.,
and Persson, M. (2007). Applications of agent based
simulation. In Antunes, L. and Takadama, K., edi-
tors, Multi-Agent-Based Simulation VII, volume 4442
of Lecture Notes in Computer Science, pages 15–27.
Springer Berlin / Heidelberg. 10.1007/978-3-540-
76539-4
2.
Kl¨ugl, F., Herrler, R., and Fehler, M. (2006). Sesam: imple-
mentation of agent-based simulation using visual pro-
gramming. In Proceedings of the fifth international
AgentbasedModellingandSimulationusingStateMachines
277

joint conference on Autonomous agents and multia-
gent systems, AAMAS ’06, pages 1439–1440, New
York, NY, USA. ACM.
Konolige, K. (1997). COLBERT: A language for reactive
control in sapphira. In Brewka, G., Habel, C., and
Nebel, B., editors, KI:Advances in Artificial Intelli-
gence, volume 1303 of Lecture Notes in Computer
Science, pages 31–52. Springer.
Loetzsch, M., Risler, M., and Jungel, M. (2006). Xabsl
- a pragmatic approach to behavior engineering. In
Intelligent Robots and Systems, 2006 IEEE/RSJ Inter-
national Conference on, pages 5124 –5129.
Lytinen, S. L. and Railsback, S. F. (2012). The evolution
of agent-based simulation platforms: A review of net-
logo 5.0 and relogo. In Proceedings of the Fourth In-
ternational Symposium on Agent-Based Modeling and
Simulation, Vienna, Austria.
Nikolai, C. and Madey, G. (2009). Tools of the trade:
A survey of various agent based modeling platforms.
Journal of Artificial Societies and Social Simulation,
12(2):2.
North, M. J., Howe, T. R., Collier, N. T., and Vos, J. R.
(2007). A declarative model assembly infrastructure
for verification and validation. In Advancing Social
Simulation: The First World Congress. Springer, Hei-
delberg, FRG.
Railsback, S. F., Lytinen, S. L., and Jackson, S. K. (2006).
Agent-based simulation platforms: Review and devel-
opment recommendations. SIMULATION, 82(9):609–
623.
Rao, A. S. and Georgeff, M. P. (1991). Modeling rational
agents within a BDI-architecture. In Allen, J., Fikes,
R., and Sandewall, E., editors, Proceedings of the 2nd
International Conference on Principles of Knowledge
Representation and Reasoning (KR’91), pages 473–
484. Morgan Kaufmann publishers Inc.
Risler, M. and von Stryk, O. (2008). Formal behavior speci-
fication of multi-robot systems using hierarchical state
machines in XABSL. In AAMAS08-Workshop on For-
mal Models and Methods for Multi-Robot Systems,
Estoril, Portugal.
Sakellariou, I. (2012). Turtles as state machines - agent pro-
gramming in netlogo using state machines. In Filipe,
J. and Fred,A. L. N., editors, ICAART 2012 - Proceed-
ings of the 4th International Conference on Agents
and Artificial Intelligence, Volume 2 - Agents, Vilam-
oura, Algarve, Portugal, 6-8 February, 2012, pages
375–378. SciTePress.
Sakellariou, I., Kefalas, P., and Stamatopoulou, I. (2008).
Enhancing Netlogo to Simulate BDI Communicat-
ing Agents. In Darzentas, J., Vouros, G., Vosinakis,
S., and Arnellos, A., editors, Artificial Intelligence:
Theories, Models and Applications, volume 5138 of
Lecture Notes in Computer Science, pages 263–275.
Springer Berlin / Heidelberg.
Stefano, A. and Santoro, C. (2005). Supporting agent de-
velopment in erlang through the exat platform. In
Unland, R., Calisti, M., Klusch, M., Walliser, M.,
Brantschen, S., Calisti, M., and Hempfling, T., ed-
itors, Software Agent-Based Applications, Platforms
and Development Kits, Whitestein Series in Soft-
ware Agent Technologies and Autonomic Computing,
pages 47–71. Birkhuser Basel.
Wilensky, U. (1999). Netlogo. Center for Con-
nected Learning and Computer-based Mod-
elling. Northwestern University, Evanston, IL.
http://ccl.northwestern.edu/netlogo.
APPENDIX
The following table provides a side by side compar-
ison of the original code of the “termites” model to
that of TSTATES for illustration purposes. Note that
TSTATES allows state machine encoding to be more
readable and thus easier to debug and develop.
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
278
Table 1: Code for the Termites model, between TSTATES and original NetLogo code.
TStates Code NetLogo Original Code
to-report state-def-of-turtles
report (list
state "search-for-chip"
# when "pile-found" do "pick-up"
goto "find-new-pile"
# otherwise do "move-randomly"
goto "search-for-chip"
end-state
state "find-new-pile"
# for-n-ticks 20 do "fd 1"
goto "find-new-pile"
# when "pile-found" do "nothing"
goto "put-down-chip"
# otherwise do "move-randomly"
goto "find-new-pile"
end-state
state "put-down-chip"
# when "pcolor = black" do "drop-chip"
goto "get-away"
# otherwise do "move-randomly"
goto "put-down-chip"
end-state
state "get-away"
# for-n-ticks 20 do "fd 1"
goto "get-away"
# when "pcolor = black" do "fd 1"
goto "search-for-chip"
# otherwise do "move-randomly"
goto "get-away"
end-state )
end
to move-randomly
rt random 50
lt random 50 fd 1
end
to pick-up
set pcolor black set color orange
end
to drop-chip
set pcolor yellow set color white
end
to-report pile-found
report pcolor = yellow
end
to-report empty-space
report pcolor = black
end
to go
ask turtles
[ ifelse steps > 0
[ set steps steps - 1]
[ run next-task
wiggle ]
fd 1 ]
tick
end
to wiggle ; turtle procedure
rt random 50
lt random 50
end
;; "picks up chip" by turning orange
to search-for-chip
if pcolor = yellow
[ set pcolor black
set color orange
set steps 20
set next-task task find-new-pile
]
end
;; look for yellow patches
to find-new-pile
if pcolor = yellow
[set next-task task put-down-chip]
end
;; finds empty spot & drops chip
to put-down-chip
if pcolor = black
[ set pcolor yellow
set color white
set steps 20
set next-task task get-away
]
end
;; get out of yellow pile
to get-away
if pcolor = black
[set next-task task search-for-chip]
end
AgentbasedModellingandSimulationusingStateMachines
279
