
Robust Gain-scheduling LPV Control for a Reconfigurable Robot
R. Al Saidi
1
and S. Alirezaee
2
1
University of Windsor, Windsor, Canada
2
Electrical and Computer Engineering Department, Windsor, Canada
Keywords:
Reconfigurable Robot, Variable D-H Parameters, Gain-scheduling Control, LPV Control.
Abstract:
This paper develops a robust gain–scheduling linear parameter varying (LPV) control for a reconfigurable
robot that combines as many properties of different open kinematic structures as possible and can be used for
a variety of applications. The kinematic design parameters, i.e., the Denavit–Hartenberg (D–H) parameters,
can be modified to satisfy any configuration required to meet a specific task. By varying the joint twist angle
parameter (a configuration parameter), the presented model is reconfigurable to any desired open kinematic
structure, such as ABB, FANUC and SCARA robotic systems. A robust LPV control is developed for on–line
measured parameters of a perturbed LPV model of a Bosch Scara robot arm. This control achieves superior
tracking performance in the presence of dynamic and parameter uncertainties.
1 INTRODUCTION
Robotics technology has been recently exploited in
a variety of areas and various robots have been de-
veloped to accomplish sophisticated tasks in differ-
ent fields and applications such as in space explo-
ration, future manufacturing systems, medical tech-
nology, etc. In space, robots are expected to complete
different tasks, such as capturing a target, construct-
ing a large structure and autonomously maintaining
in-orbit systems. The rapid changes and adjustments
of the Reconfigurable Manufacturing Systems (RMS)
structure must happen in a relatively short time rang-
ing between minutes and hours and not days or weeks.
These systems’ reconfigurability calls for their com-
ponents, such as machines and robots to be rapidly
and efficiently modifiable to varying demands. In
these missions, one fundamental task with the robot
would be the tracking of changing workspace, paths,
the grasping and the positioning of a target in Carte-
sian space. It is desirable and cost effective to em-
ploy a single versatile robot capable of performing
tasks such as inspection, contact operations, assem-
bly (insertion or removal parts), and carrying ob-
jects (pick and place). To satisfy such varying envi-
ronments, a robot with changeable (kinematic struc-
ture) configuration is necessary to cope with these
requirements and tasks. In the literature, LPV con-
trol is used for predefined (fixed) kinematic struc-
ture robots achieving specific tracking performance
requirements. Methodologies for designing LPV con-
trol are given in (Packard, 1994), (Apkarian and
Adams, 1997), (P. Gahinet, 1994) and (Kemin Zhou,
1996), where the gain scheduled controller was guar-
anteed for H
∞
performance of a class of LPV non-
linear systems. In (Zhongwei Yu, 2003) and (Seyed
Mahdi Hashemi, 2009) a polytopic gain scheduled H
∞
control is developed for a two Degrees Of Freedom
(DOF) robot considering nominal parameters without
uncertainties. In (Y.Sun and Liang, 2018), an LPV
controller is developed for a large number of affine
scheduling dynamic parameters of a 2 DOF robot ma-
nipulator without considering uncertainties in their
robotic model.
2 KINEMATICS DEVELOPMENT
OF A RECONFIGURABLE
ROBOT
Development of the general n–DOF Global Kine-
matic Model (n–GKM) is necessary for supporting
any open kinematic robotic arm. The n–GKM model
is generated by the variable D–H parameters as pro-
posed in (A. Djuric, 2010). The D–H parameters pre-
sented in Table 1 are modeled as variable parameters
to accommodate all possible open kinematic struc-
tures of a robotic arm. The twist angle variable α
i
is limited to five different values, (0
0
,±90
0
,±180
0
),
Al Saidi, R. and Alirezaee, S.
Robust Gain-scheduling LPV Control for a Reconfigurable Robot.
DOI: 10.5220/0011356000003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 89-96
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
89
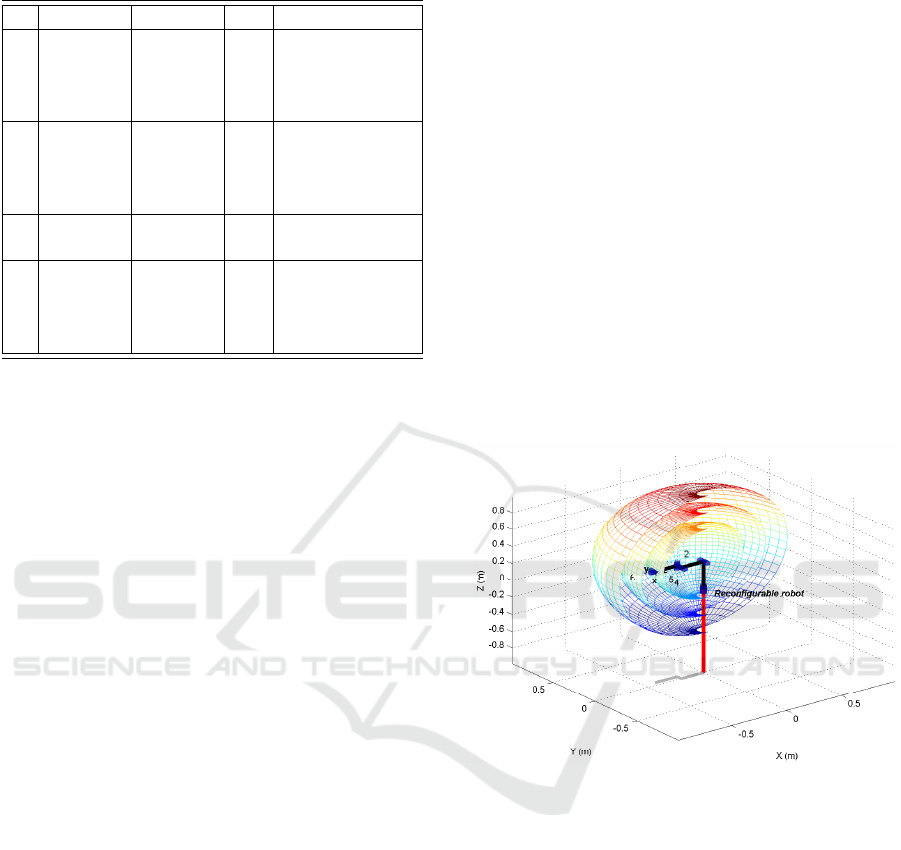
Table 1: D–H parameters of the n-GKM model.
i d
i
θ
i
a
i
α
i
1
R
1
d
DH1
R
1
θ
1
a
1
0
0
,±180
0
,±90
0
+T
1
d
1
+T
1
θ
DH1
2
R
2
d
DH2
R
2
θ
2
a
2
0
0
,±180
0
,±90
0
+T
2
d
2
+T
2
θ
DH2
. . .
. . . . . . . . . . . .
n
R
n
d
DHn
R
n
θ
n
a
n
0
0
,±180
0
,±90
0
+T
n
d
n
+T
n
θ
DHn
The subscript DHn implies that the d
i
or θ
i
parameter is
constant.
to maintain perpendicularity between joints’ coordi-
nate frames. Consequently, each joint has six distinct
positive directions of rotation and/or translation. The
reconfigurable joint is a hybrid joint that can be con-
figured to be either revolute or prismatic type of mo-
tion, according to the required task. For the n–GKM
model, a given joint’s vector z
i−1
can be placed in the
positive or negative directions of the x,y, and z axis in
the Cartesian coordinate frame. This is expressed in
(1) and (2):
Rotational Joints : R
i
= 1 and T
i
= 0 (1)
Translational Joints : R
i
= 0 and T
i
= 1 (2)
The variables R
i
and T
i
are used to control the selec-
tion of joint type (rotational and/or translational). The
orthogonality between the joint’s coordinate frames is
achieved by assigning appropriate values to the twist
angles α
i
. Their trigonometric functions are defined
as the joint’s reconfigurable parameters (K
Si
& K
Ci
)
and expressed in (3) and (4):
K
si
= sin(α
i
) (3)
K
ci
= cos(α
i
) (4)
The kinematics of a reconfigurable robot are calcu-
lated by multiplication of the all homogeneous ma-
trices from the base frame to the flange frame. The
resulting homogeneous transformation matrix for the
(n-GKM) model is given in (5):
A
i−1
=
cos(R
i
θ
i
+ T
i
θ
DHi
) −K
Ci
sin(R
i
θ
i
+ T
i
θ
DHi
)
sin(R
i
θ
i
+ T
i
θ
DHi
) K
Ci
cos(R
i
θ
i
+ T
i
θ
DHi
)
0 K
Si
0 0
(5)
K
Si
sin(R
i
θ
i
+ T
i
θ
DHi
) a
i
cos(R
i
θ
i
+ T
i
θ
DHi
)
−K
Si
cos(R
i
θ
i
+ T
i
θ
DHi
) a
i
sin(R
i
θ
i
+ T
i
θ
DHi
)
K
Ci
R
i
d
DHi
+ T
i
d
i
0 1
,
i = 1, 2,...,n
The workspace of a reconfigurable robot manip-
ulator with similar kinematic structure to the PUMA
560 is calculated and shown in Fig. 1. The resulting
workspace shows a union of three layers which in-
dicates the workspace variability property of any re-
configurable manipulator. The three workspace lay-
ers are calculated based on turning the third joint into
a prismatic one (transnational motion). The variable
workspace shown in Fig.1 was generated when the
third joint has translated with 0.1, 0.2, 0.3 m.
Figure 1: The workspace of a reconfigurable manipulator.
3 DYNAMIC PARAMETER
PROPERTIES OF A
RECONFIGURABLE ROBOT
The equation of motion of a reconfigurable robot can
be described with a set of coupled differential equa-
tions in matrix form:
τ = M(q) ¨q +C(q, ˙q) + F ˙q + G(q) (6)
where q, ˙q and ¨q are respectively the vectors of gener-
alized joint coordinates, velocities and accelerations.
M(q) is the joint–space inertia matrix, C(q, ˙q) is the
Coriolis and centripetal coupling matrix, F is the fric-
tion force, G(q) is the gravity loading, and τ is the
vector of generalized actuator torques associated with
the generalized coordinates q. The effect of varying
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
90
the configurations of the dynamic parameters such as
gravity and inertia are analyzed for the shoulder and
elbow joints below.
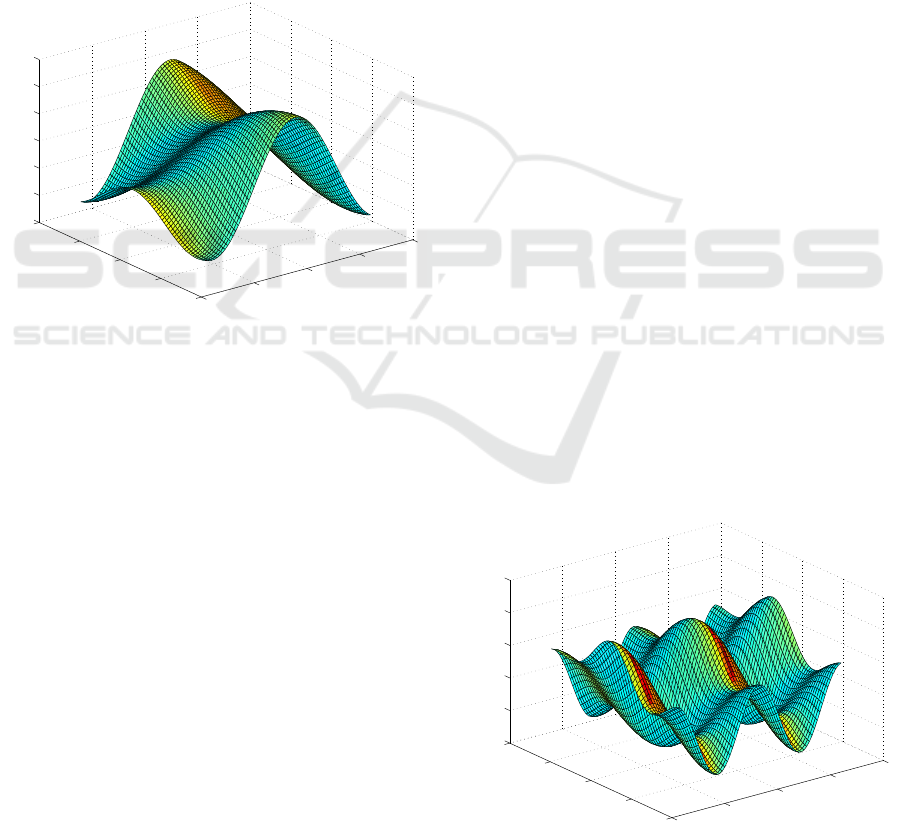
3.1 Gravity Load Parameter
The gravity load term in (6) is generally a dominant
term and present even when the manipulator is sta-
tionary or moving slowly. The torque on a joint due
to gravity acting on the robot depends strongly on the
robot’s pose. The torque on the shoulder joint (q
2
) is
much greater when the robot is stretched out horizon-
tally as shown in Fig.2, which indicates the relation
between the gravity torque, shoulder (q
2
) and elbow
(q
3
) joints.
−4
−2
0
2
4
−4
−2
0
2
4
−30
−20
−10
0
10
20
30
q2 (rad)
q3 (rad)
g2 (Nm)
Figure 2: Gravity torque variation due to a different config-
uration pose (shoulder gravity load).
3.2 Inertia Matrix Parameter
The inertia matrix is a positive definite symmetric ma-
trix in which the matrix elements are functions of the
manipulator pose. The inertia matrix has diagonal el-
ements M
i j
that describe the inertia exerting the joint j
by torque τ
j
= M
i j
q
j
. The first two diagonal elements,
corresponding to the robot’s waist and shoulder joints,
are large since motion of these joints involves rotation
of the heavy upper– and lower–arm links. The off-
diagonal terms M
i j
= M
ji
, i ̸= j represent coupling of
acceleration from joint j to the torques and forces on
joint j − 1. The variation of the inertia elements as
a function of robot configurations are shown in Fig.3.
The results indicate a significant variation in the value
of M
11
which changes by a factor of: max(M
11
(:)) /
min(M
11
(:)) = 1.7683. The off–diagonal represents
coupling between the angular acceleration of joint 2
and the torque on joint 1.
4 SYNTHESIS OF
GAIN-SCHEDULED
CONTROLLER
It has been shown from the analysis above that, the
dynamic parameters of a reconfigurable robot are
strongly dependent on robot configurations. These
variable parameters completely define the operating
point of the robot and are assumed to be measured in
real time. This motivates the design of a control sys-
tem that is scheduled with the measured parameters
such as M(q) and F( ˙q) to provide higher performance
for large variation in these parameters. Gain schedul-
ing or LPV techniques are used for controlling LPV
systems. An LPV controller consists of designing
a linear time invariant (LTI) controller that is adapt-
ing itself when the operating conditions change. In
this control method, the system is assumed to depend
affinely on a measured vector of time varying param-
eters. Assuming on–line measurements of these pa-
rameters, they can be fed to the controller to optimize
the performance and robustness of the closed loop
system.
4.1 Synthesis of LPV Polytopic
Controllers
LPV control is applicable to time varying and non-
linear systems whose linearized dynamics are approx-
imated by an affine parameter dependent system in the
form of:
˙x =A(θ(t))x + B
1
(θ(t))w + B
2
(θ(t))u
z =C
1
(θ(t))x + D
11
(θ(t))w + D
12
(θ(t))u
y =C
2
(θ(t))x + D
21
(θ(t))w + D
22
(θ(t))u (7)
where the time varying parameter vector θ(t) ranges
within a known interval. The system (7) is further
−4
−2
0
2
4
−4
−2
0
2
4
2
2.5
3
3.5
4
4.5
q2 (rad)
q3 (rad)
M11 (Kg m
2
)
Figure 3: Variation of inertia matrix elements M
11
with con-
figuration.
Robust Gain-scheduling LPV Control for a Reconfigurable Robot
91

assumed to be polytopic:
A(θ(t)) B
1
(θ(t)) B
2
(θ(t))
C
1
(θ(t)) D
11
(θ(t)) D
12
(θ(t))
C
2
(θ(t)) D
21
(θ(t)) D
22
(θ(t))
∈ Co
A
i
B
1i
B
2i
C
1i
D
11i
D
12i
C
2i
D
21i
D
22i
,i = 1,2,··· , r
(8)
where A
i
,B
1i
,··· , denote the values of
A(θ(t)), B
1
(θ(t)), · · · , at the polytope vertices.
The system matrix dimensions are given by:
A(θ(t)) ∈ R
n×n
,D
11
(θ(t)) ∈ R
p
1
×m
1
,D
22
(θ(t)) ∈ R
p
2
×m
2
(9)
An LPV system has a quadratic H
∞
performance γ if
and only if there exists a single positive definite ma-
trix X > 0 such that:
A(θ(t))
T
X + XA(θ(t)) XB(θ(t)) C(θ(t))
T
B(θ(t))
T
X −γI D(θ(t))
T
C(θ(t)) D(θ(t)) −γI
< 0
(10)
for all admissible values of the parameter vector θ(t).
An LPV polytopic controller with the same parameter
dependence as the system is given as:
˙x
k
=A
k
(θ(t))x + B
k
(θ(t))w
z =C
k
(θ(t))x + D
k
(θ(t))w (11)
Then, the LPV controller (11) can be employed to as-
sure the quadratic H
∞
performance γ of the resulting
closed loop system:
˙x
cl
=A
cl
(θ(t))x + B
cl
(θ(t))w
z =C
cl
(θ(t))x + D
cl
(θ(t))w (12)
where
A
cl
(θ(t)) =
A(θ(t))+ B
2
(θ(t))D
k
(θ(t))C
2
(θ(t))
B
k
(θ(t))C
2
(θ(t))
B
2
(θ(t))C
k
(θ(t))
A
k
(θ(t))
B
cl
(θ(t)) =
B
1
(θ(t))+ B
2
(θ(t))D
k
(θ(t))D
21
(θ(t))
B
k
(θ(t))D
21
(θ(t))
C
cl
(θ(t)) =
C
1
(θ(t))+ D
12
(θ(t))D
k
(θ(t))C
2
(θ(t))
D
12
(θ(t))C
k
(θ(t))
D
cl
(θ(t)) = D
11
(θ(t))+ D
12
(θ(t))D
k
(θ(t))D
21
(θ(t))
(13)
Synthesis of an LPV control is to ensure the follow-
ing:
• The resulting polytopic closed loop system (12)
is enforced to be stable over the entire parameter
polytope and for arbitrary parameter variations.
• The L
2
–induced norm of the performance sig-
nals are bounded by γ for all possible trajectories
within the parameter vector θ(t).
4.2 Application of LPV Polytopic
Control
A Bosch Scara robot with RRT kinematic structure
is considered where the first two joints and links are
shown in Fig.4 (above). The third joint is considered
to be mechanically decoupled from the motions of the
other joints. The inertia and Coriolis matrices are de-
rived as follows:
M(θ) =
I
1
+ 2I
2
cos(θ
2
) I
3
+ I
2
cos(θ
2
)
I
3
+ I
2
cos(θ
2
) I
3
(14)
C(θ,
˙
θ) =
"
−2I
2
sin(θ
2
)
˙
θ
1
˙
θ
2
− I
2
sin(θ
2
)
˙
θ
2
1
I
2
sin(θ
2
)
˙
θ
2
1
#
(15)
The complete system model of the first two links
is shown in Fig.4 (below), including servo motors,
and the dynamic cross–coupling torques (Coriolis ef-
fects). A spring–damper is introduced to model the
torsion stiffness of the robot shaft between each DC
motor and the link. The dynamic coupling appears
in the joint systems as torques on the joint axes and is
considered as an independent disturbance torque. The
nominal values of the robot parameters are estimated
at the zero position of the first two joints. The state
equations of the first link are derived as follows:
˙x
1
= x
2
˙x
2
=
1
J
L1
(K
s
x
3
+ D
s
N
1
x
4
− F
v1
x
2
+ τ
DL
)
˙x
3
= N
1
x
4
− x
2
˙x
4
=
1
J
m1
(K
m1
x
5
− N
1
k
5
x
3
− F
v1
x
4
)
˙x
5
=
1
L
m1
(−R
m1
x
5
− K
m1
x
4
+ x
6
+ K
p12
u − K
p12
x
5
)
˙x
6
= −k
i12
x
5
+ k
i12
u
y = x
1
(16)
The derivations of the state equations for the sec-
ond link are omitted for brevity but are similar to the
derivations above.
4.3 Application of LPV Control
In this subsection, an LPV polytopic control is de-
signed for the LPV linear system given in (16)
with two parameters configuration dependent M(q)
and F( ˙q). These two coefficients, satisfy M(q) ∈
[M
min
,M
max
] and F( ˙q) ∈[F
min
,F
max
]. Assuming that
M(q) and F( ˙q) are on–line measurable parameters,
the controller is allowed to incorporate these mea-
surements in the same fashion as the system. The re-
sulting LPV controller exploits all the available mea-
surements of M(q) and F( ˙q) to provide a smooth and
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
92
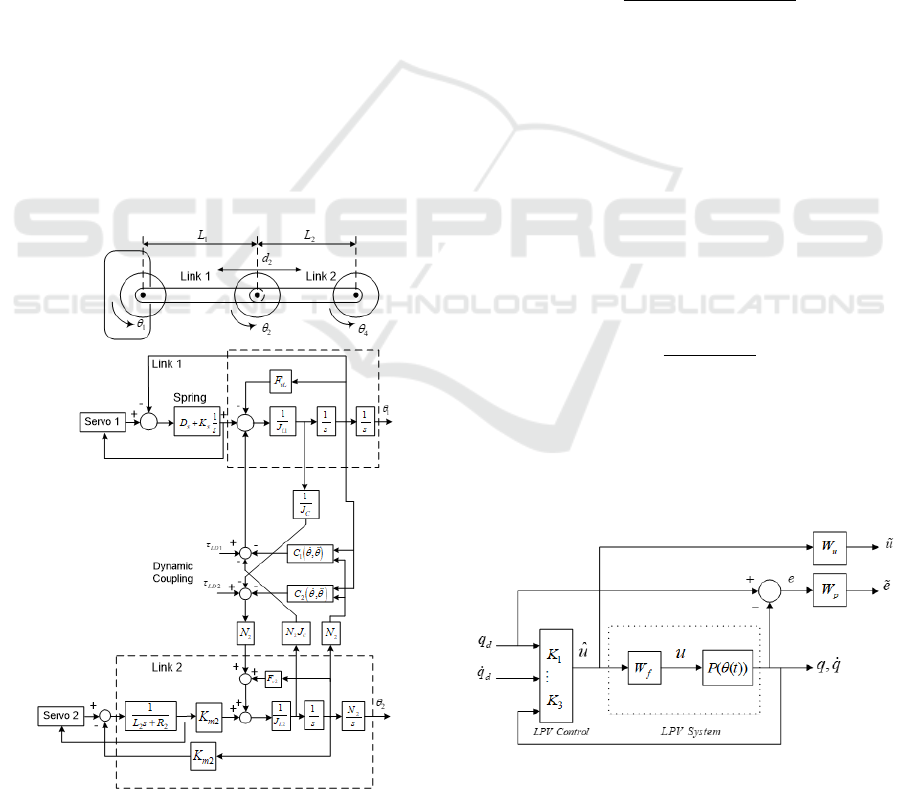
automatic gain scheduling. The LPV control struc-
ture displayed in Fig.5 consists of the LPV linear
system P(θ(t)) and three LPV polytopic controllers.
The reference velocity ˙q
d
and position q
d
are fed di-
rectly to the LPV feedforward controllers K
1
(θ(t))
and K
2
(θ(t)), respectively, while the robot configura-
tion position q is fed back to the LPV feedback con-
troller K
3
(θ(t)). The LTI performance function W
p
is
chosen to weight the resulting error e between the ref-
erence position q
d
and measured joint angle position
q. The function K
3
(θ(t))S(θ(t)) is weighted using an
LTI input weighting function W
u
to ensure robustness
against unmodeled dynamics. The LPV control ob-
jectives are as follows:
1. To get internal stability of the closed loop system.
2. To enforce the performance and robustness re-
quirements by minimizing the L
2
–gain of the
closed loop performance channel.
These objectives should be satisfied for the time vary-
ing trajectories M(q) and F( ˙q). The design proce-
dure is performed with describing the LPV system
P(θ(t)) (16) by two affine parameter–dependent mod-
els. Using the LPV loop shaping procedure, the
resulting LPV polytopic system is placed within a
polytope convex hull of four vertex systems Co{P
i
,
Figure 4: Schematic top view of the Bosch Scara robot in
zero position (above). Model of first two links and servo
motors of the Bosch Scara robot (below).
i = 1,··· , 4}. The vertices P
i
are the values of P(θ(t))
at the four vertices (the four corners P
1
,··· , P
4
) of the
following parameter box:
p
1
=
M
max
F
max
, p
2
=
M
min
F
max
p
3
=
M
max
F
min
, p
4
=
M
min
F
min
(17)
The LPV synthesis problem illustrated in Fig.5 is
solved using the Matlab/Linear Matrix Inequality
(LMI) control toolbox. To solve this problem, the in-
put should be parameter independent (Apkarian and
Adams, 1997). This condition is satisfied by pre–
filtering the control input u with a high pass filter W
f
as follows:
W
f
=
(s + 2π ∗ 100 ∗ 0.4)
(1/2000s + 2π ∗ 100)
(18)
The optimization problem is to find an LPV controller
to minimize:
W
p
S
W
u
KS
L
2
(19)
The performance weighting functions W
p
and W
u
are
designed to enforce the performance and robustness
specifications in (19). An appropriate scaling of the
system has been performed so that the input is less
than or equal to one in magnitude, and therefore a
simple input weight W
u
= 1 is selected. The perfor-
mance weight is chosen as follows:
W
p
=
(s/M + w
c
)
s + w
c
A
(20)
The value w
c
= 10 has been selected to achieve ap-
proximately the desired crossover frequency w
c
of 10
rad/s. The steady state error requirement is deter-
mined by the selection of the parameter value of A,
which is chosen to be A = 10
−4
.
Figure 5: LPV control structure includes the LPV
system P(θ(t)), performance weighting function W
p
,
robustness function W
u
, LPV polytopic controllers
(K
1
(θ(t)),··· ,K
3
(θ(t)) and input filter W
f
.
Robust Gain-scheduling LPV Control for a Reconfigurable Robot
93
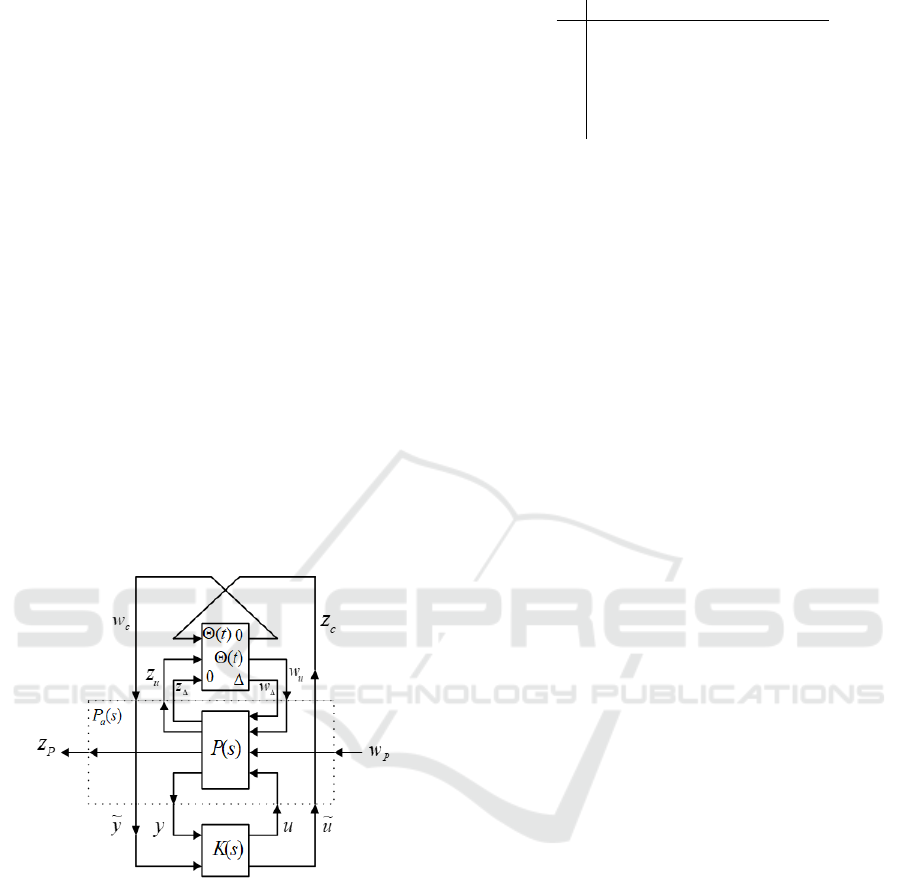
5 SYNTHESIS OF ROBUST LPV
CONTROLLERS WITH LFT
SYSTEM DESCRIPTION
In the following, a robust LPV control with LFT sys-
tem description is developed for a perturbed time–
varying system where the control structure is shown
in Fig.6. The robust control objective is to guaran-
tee some closed loop performance γ > 0 for the L
2
–
gain of w
p
→ z
p
against the time varying measured
Θ(t) and uncertain (not measured) parameters ∆. The
robust LPV control synthesis for LPV systems (both
described with LFT interconnection) should guaran-
tee that the resulting closed loop system is internally
stable for all time varying and uncertain parameters.
Also, the induced L
2
–norm of the closed loop system
satisfies:
F
l
F
u
P,
∆ 0
0 Θ(t)
,F
l
(K,Θ(t))
∞
< γ
(21)
where F
u
and F
l
are the upper and lower closed loop
system. To solve the above robust LPV synthesis
Figure 6: The robust LPV control structure, LPV system
P
s
(s) with the time varying parameters Θ(t) and uncertainty
block ∆
∆
∆.
problem, the uncertainties of the time varying param-
eter vector Θ(t) of both LPV system and controller
are gathered into a single uncertainty block with the
uncertainty ∆ as shown in Fig.6. Here the uncertainty
∆ satisfies ∆(iw) ∈ ∆
∆
∆, where ∆
∆
∆ is defined as:
∆
∆
∆ = {∆ = diag[δ
1
I
r
1
,...,δ
s
I
r
S
,∆
1
,...,∆
F
] : δ
i
∈ C,
∆
j
∈ C
m
j
×m
j
,
∥
∆
∥
< 1} (22)
We introduce the new LTI state–space description
of the system P
a
(s):
˙x
z
u
z
c
z
∆
z
p
y
˜y
=
A B
u
0 B
∆
B
p
B
1
0
C
u
D
uu
0 D
u∆
D
up
D
u1
0
0 0 0 0 0 0 I
r
C
∆
D
∆u
0 D
∆∆
D
∆p
D
∆1
0
C
p
D
pu
0 D
p∆
D
pp
D
p1
0
C
1
D
1u
0 D
1∆
D
1p
D
11
0
0 0 I 0 0 0 0
x
w
u
w
c
w
∆
w
p
u
˜u
(23)
and the LTI controller with a form of :
˙x
c
= A
c
x
c
+ B
c
y
˜y
u
˜u
= C
c
x
c
+ D
c
y
˜y
(24)
so the closed loop system that maps exogenous in-
put w
p
to controlled output z
p
can be expressed as:
F
u
(F
l
(P
a
(s),K(s)), ∆
G
) (25)
where
∆
G
=
∆ 0 0
0 Θ(t) 0
0 0 Θ(t)
, ∆ ∈ C , Θ(t) ∈ R
(26)
The compatible scaling matrix to the block diagonal
uncertainty matrix of (26) is:
D
G
=
D
∆
0 0
0 D
11
D
12
0 D
21
D
22
(27)
where the scaling structure is given as:
D
∆
∆ = D
∆
∆, ∀∆
D
11
D
12
D
21
D
22
Θ(t) 0
0 Θ(t)
=
Θ(t) 0
0 Θ(t)
×
D
11
D
12
D
21
D
22
, ∀Θ(t)
(28)
The corresponding robust performance problem
can be solved by finding a robust LTI control in form
of (24) for the nominal LTI system P
a
(s) of (23)
against the norm bounded structured uncertainties ∆
G
.
A sufficient condition for robust performance is pro-
vided by the small gain theorem. This statement is
equivalent to: Given γ > 0, an uncertainty structure
∆
G
, find a scaling matrix D
G
and an LTI controller
K(s) such that the closed loop system is internally sta-
ble and
D
1/2
G
F
l
(P
a
(s),K(s))D
−1/2
G
∞
< γ (29)
Thus the original LPV control problem is replaced by
a robust control problem admitting some degree of
conservatism.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
94
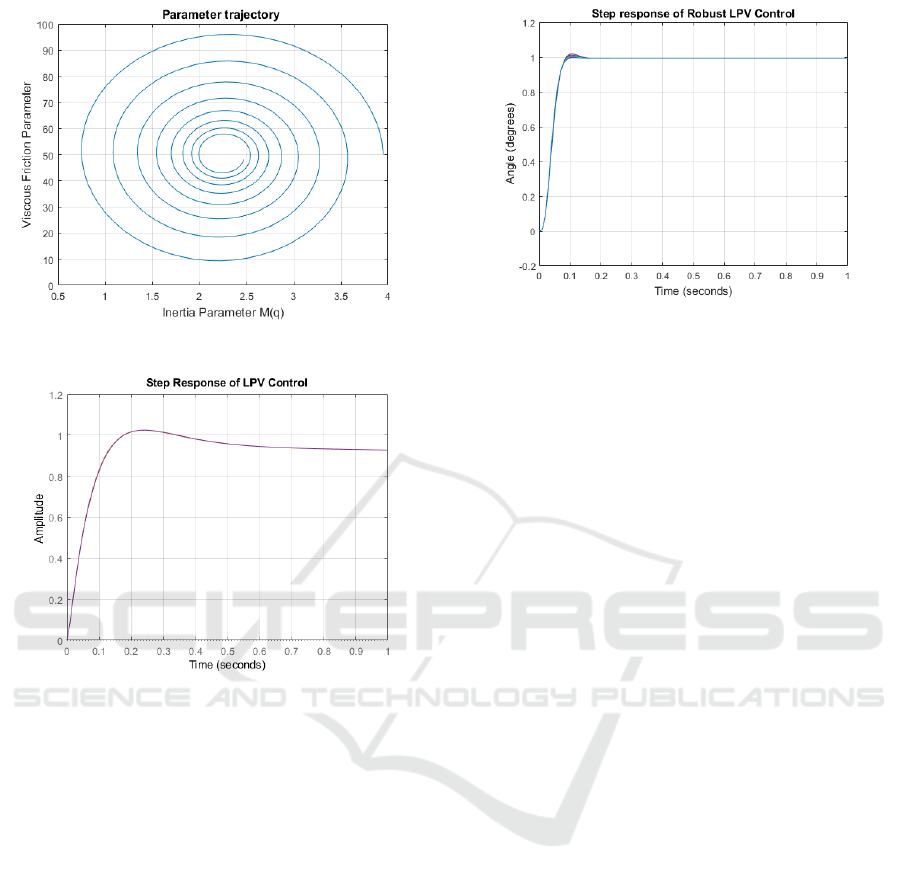
Figure 7: Parameter trajectory.
Figure 8: Step response of the LPV closed loop system.
5.1 Simulation Results of LPV and
Robust LPV Applications
The two parameter M(q) and F( ˙q) are frozen to some
values in the parameter box specified in (17). The
LPV close loop system is simulated for frozen pa-
rameters 10%, 30%, 60% and 90% of their nominal
values and along the following spiral parameter tra-
jectory shown in Fig.7.
M(q) = 2.25 + 1.7e
−4t
cos(100t) (30)
V (q) = 50 + 49e
−4t
sin(100t)
The step response using LPV control (11) in the pres-
ence of real and dynamic uncertainties is shown in
Fig.8. The step performance is degraded due to the
slow response and high steady state error. The step
response using the robust LPV control (24) shown in
Fig.9 indicates that the performance requirements are
satisfied in terms of the steady state and speed of re-
sponse in the presence of same uncertainties.
Figure 9: Step response of the LPV closed loop system with
the presence of uncertainty ∆
∆
∆.
6 CONCLUSIONS
In our research, we developed an LPV control for a
reconfigurable manipulator with features such as vari-
able twist angles, length links and hybrid (transna-
tional/rotational) joints. The kinematic design param-
eters, i.e., the D-H parameters, are variable and can
generate any required configuration to facilitate a spe-
cific application. The dynamic parameters such as in-
ertia, torque and gravity of a reconfigurable robot are
dependent on the robot configuration and modeled as
time-varying and can be measured online. An LPV
controller is developed that adapts itself with varying
operating conditions. A robust LPV controllers were
developed using LFT control structure for a perturbed
time-varying system. The closed loop responses us-
ing robust LFT control was proved to satisfy the sta-
bility and tracking performance requirements. This
research is intended to serve as a foundation for fu-
ture studies in reconfigurable control systems.
REFERENCES
A. Djuric, R. Al Saidi, W. E. (2010). Global kinematic
model generation of n-dof reconfigurable machinery
structure. In Proc. IEEE International Conference on
Automation Science and Engineering.
Apkarian, P. and Adams, R. J. (1997). Advanced gain-
scheduling techniques for uncertain systems. In IEEE
Trans. on Control System Technology, Vol. 6, No. 1,
pp. 21-32.
Kemin Zhou, J. C. Doyle, K. G. (1996). Robust and optimal
control. Printice hall.
P. Gahinet, P. A. (1994). Self-scheduled H
∞
control of linear
parameter varying systems. In Proc. Amer. Control.
Conference. pp. 856-860.
Packard (1994). Gain scheduling via linear fractional trans-
Robust Gain-scheduling LPV Control for a Reconfigurable Robot
95

formations. In Systems and Control Letters, Vol. 22,
pp. 79-92.
Seyed Mahdi Hashemi, Hossam Seddik Abbas, H. W.
(2009). Lpv modelling and control of a 2-dof robotic
manipulator using pca-based parameter set mapping.
In Decision and Control 2009 held jointly with the
2009 28th Chinese Control Conference. Proceedings
of the 48th IEEE Conference on, pp. 7418-7423.
Y.Sun, F.Xu, X. W. and Liang, B. (2018). Lpv model-
based gainscheduled control of a space manipulator.
In the 57th IEEE Conference on Decision and Control
(CDC), FL, USA, December pp. 5114-5120.
Zhongwei Yu, Huitang Chen, P.-Y. W. (2003). Polytopic
gain scheduled H
∞
control for robotic manipulators.
In Robotica volume 21, pp. 495-504.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
96
