
Assistance System for the Interactive Machine Adjustment
(of a Tufting Machine)
Dominik Huesener and Jürgen Rossmann
Institute of Man-Machine-Interaction, RWTH Aachen University, Ahornstrasse 55, 52074 Aachen, Germany
Keywords: Digital Twin, Assistance System, Simulation, Textile Engineering.
Abstract: The paper illustrates how a digital twin, a virtual representation of a physical asset, and simulation software
can be used to find best operating parameters and guide an operator through the adjustment process of the
machine. The user interacts with the digital twin either through a 3D GUI or using augmented reality, which
allows to display information of the digital twin next to the real twin. The machine is equipped with sensors
that continuously measure the state of the machine and are connected to the digital twin through EtherCAT
connection. The interactive system gives intuitive instructions that reduce the expert knowledge that is needed
such that even trainees can operate the machine and digitizes the process for experienced workers.
1 INTRODUCTION
The adjustment of a mechanical machine like a
tufting machine is a cumbersome task. Until today it
requires an iterative process of adjusting machine
parameters and then test the settings which prohibit
frequent changes of the machine e.g., to produce
different products. It also relies on the knowledge of
experts as the relationship between the adjustment of
levers, phases etc. and the change of the machine
tools is not easy to understand. However, the trend in
industry 4.0 are customizable products which require
frequent machine adjustments. Another challenge for
small and medium enterprises (SME) is an ageing
workforce due to changing demography and how to
conserve valuable expert knowledge.
The assistance system developed tries to optimize
this process by equipping a machine with sensors to
measure tool positions and mirroring tool positions to
the digital twin, a virtual model of the real machine,
and being able to save these settings to create a
database for different products and then compares the
current tool positions with the desired positions and
gives hints to the user what parameters need to
change. This way the expert’s knowledge can be
conserved. The hints are displayed exactly where the
user needs to change a parameter and shows how
much to change a certain parameter to achieve a
requested accuracy. The parameters can also be
optimized in the simulation and then transferred back
to the real machine. The assistance system yields
reproducible results.
The paper is organized as follows: First, a quick
overview of the related literature is given, then the
concept of the digital twin-based assistance system
for tufting machines is made. Next, the process of the
development of the digital twin is described. Then the
assistance system itself is presented. Difficulties and
benefits along with proposed future work are
discussed. The paper ends with a conclusion.
2 RELATED LITERATURES
(Grieves, 2014) first presented the Digital Twin (DT)
concept in 2003. In 2014, he published a white paper
Figure 1: The cyber-physical system "tufting machine" and
its components (G. Reinhart, 2015; Roßmann & Schluse,
2020).
372
Huesener, D. and Rossmann, J.
Assistance System for the Interactive Machine Adjustment (of a Tufting Machine).
DOI: 10.5220/0011320300003274
In Proceedings of the 12th Inter national Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2022), pages 372-378
ISBN: 978-989-758-578-4; ISSN: 2184-2841
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

on the Digital Twin, which he defined as a virtual
representation of a physical asset fed with data from
the real machine and sending data to the real twin.
The DT consists of the machine data (called Digital
Shadow) and a model of the machine, see Figure 1.
The virtual representation enhances
conceptualization, comparison, and collaboration in
production processes since it provides a more
intuitive perspective compared to 2D sketches or data
in tables or regular graphs. As sight is the most
important human sense, a realistic visual view is
valuable. Different users can easily classify the
current state of the machine which is also consistent
for different users.
A Cyber-Physical System (CPS) is the
combination of the physical asset and the Digital
Twin with its corresponding communication
infrastructure. CPS are important building blocks of
Industry 4.0. Digital twins of different machines can
communicate with each other. Application areas of
the Digital Twin include health monitoring,
production planning (PLM), and the design of new
products. An advantage over conventional planning
software is that all data related to one product is stored
together in one place (the Digital Twin). This
presentation has massively increased the value of the
data. Although simplified, it tries to model accurate
behavior of the real twin.
In (Werner Kritzinger et al., 2018) the terms
Digital Model, Digital Shadow, or Digital Twin are
used to classify the level of communication between
the digital and physical assets. Whereas a Digital
Model is independent of its real asset, a Digital
Shadow only receives data and only the Digital Twin
allows bidirectional communication between digital
and physical assets. However, “Digital Twin” is often
used for Digital Models and Shadows as well. The
literature on actual Digital Twins however is scarce.
Especially there is a lack of case studies on a higher
level of integration.
When combined with modern simulation
technologies (such as FEM, fluid dynamics,
multibody dynamics), the digital twin becomes an
experimentable Digital Twin (Schluse & Rossmann,
2016). The digital twin ensures that results of several
simulations are stored in the digital twin and thus
through co-simulation exchanged between them
thereby circumventing incorrect results if those
simulations were carried out independently. With the
introduction of simulation to the Digital Twin not
only visualization of the current data becomes
feasible but also the generation of new data, hence “a
look into the future”. It opens the digital twin to
artificial intelligence techniques that can optimize the
assets behavior.
As a mediator, the Digital Twin can process the
machine data, find suitable settings for a given task,
and display valuable information, that is otherwise
invisible, in an understandable way, such as
suggesting actions to be taken through a human-
machine interface. In (Cichon, 2019) a concept to
facilitate the interaction of humans and machines is
presented. Among others, joysticks, screens and
Augmented or Virtual Reality (AR/VR) allow direct
interaction with the Digital Twin. The user interacts
with the virtual machine like with the real machine
and can observe its status via the Digital Twin.
(Andre Schult et al., 2019) have developed an
assistance system that records machine data and then
uses machine learning algorithms to estimate the state
of the machine. This state is compared with a user
created database with common faults to detect faults
and give recommendations to fix those.
In the project virtual textile learning, (Haase et
al.) work on assistance systems in the textile sector.
Their focus is on using digitalization and 2D/3D
visualization for learning in the textile sector.
(Minoufekr et al., 2019) built an assistance system
based on the Microsoft HoloLens for CNC machine
tools that allows for much quicker and error tolerant
testing of the machining process. Like the tufting
machine used in our project, their model was based
on kinematic chains, that they modelled in the game
engine unity.
3 CONCEPTS
A tufting machine stitches yarn into a backing
material. It is commonly used to produce carpets or
artificial grass. A shaft continuously rotates and
thereby moves the tools. The tools commonly consist
of grippers, knives, and needles, although variations
exist. The needle stitches the yarn through a backing
material which is then grabbed by the gripper. When
the needle moves back up the knife cuts through the
loop formed by the gripper.
The assistance system proposed is based on an
experimentable digital twin of the tufting machine.
The experimentable digital twin was first presented in
(Hüsener et al., 2022). A digital model of the machine
was created that accurately describes the kinematics
of the machine. It is possible to adjust the machine
just like the real machine, but much simpler and much
more settings can be tried. The behavior of tools such
as needle, gripper and knife can be estimated.
Assistance System for the Interactive Machine Adjustment (of a Tufting Machine)
373

Different settings can be shown as ghosts (Figure
2) that allow to compare different settings in a way
not possible in the real machine.
Figure 2: "Digital ghosts": Simulation allows to visualize
effects of different settings.
Parameters are adjusted through sliders that when
hovered highlight which part will change when a
particular parameter is adjusted, see Figure 3. The
opacity of the machine case can be adjusted to show
what’s going on inside the machine.
Figure 3: Assistance system to adjust machine parameters
intuitively with immediate visibility of changes and the
option to return to a previous setting.
The machine was equipped with sensors that
continuously send their measurements to a PC where
the simulation runs (digital twin). The measurements
are then preprocessed, and tool positions are
calculated using kinematic relations between sensor
changes and tool position changes.
The simulation model combined with the real
machine data yields the experimentable digital twin
of the tufting machine.
To close the cycle from the machine to the
simulation back to the machine the assistance system
will guide the user to transfer settings stored in a
database or found in simulation back to the machine.
The benefit of the digital twin is that it constantly
receives new data so it can easily control the user has
made settings as desired. The accuracy can be
specified and is limited by the accuracy of the
sensors.
4 DEVELOPMENT OF THE
DIGITAL TWIN
The Digital Twin was modelled using VEROSIM, a
simulation software for rigid-body mechanics. The
software was developed with digital twins in mind
and has plugins for interfaces to popular
communication infrastructures, such as TCP/IP, ROS
or MQTT communication.
At first, the kinematic relations of a particular
tufting machine were measured at the real machine to
create a digital model of the tufting machine. The
simulation is already able to simulate the behavior of
the real machine with all the adjustments that can be
made on the real machine, but adjustments can be
made much quicker and easier and are reversible
allowing to test different machine settings.
In a second step, the machine was equipped with
sensors to measure the current positions of axis or the
phase of the main shaft. At first those values could be
stored inside an csv file that contains a timestamp and
each sensor value and then be read by the simulation
software which then shows a virtual representation of
that values. Multiple settings can be overlayed so
changes from one setting to another can be inherently
noticed.
Once the simulation can reproduce the measured
data, it can be used to (automatically or manually)
search for optimal settings for the intended use.
Third, an interface to directly receive values from
the sensors inside VEROSIM was written. The
interface uses ADS which is a communication
protocol by Beckhoff TwinCAT that supports real
time communication. The digital twin is notified
whenever a value changes and updates its
representation accordingly. If the machine is
available remotely, then the digital twin can be shown
on any computer.
To get the virtual representation of the current
state of the machine, a script was written that
transforms sensor values into tool positions. Not all
parameters can be measured with sensors, such that
manual measurements are necessary for machine
calibration. A dialog box allows the user to change
lever arms and offsets used for this calculation to
account for varying placement of the sensors.
Finally, if the user has adjusted the virtual digital
twin in simulation mode and wishes to transfer these
adjustments back to the real machine, this paper
proposes an assistance system that aims to achieve
just that.
Figure 4 shows all the system components of the
experimentable digital twin of the tufting machine.
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
374
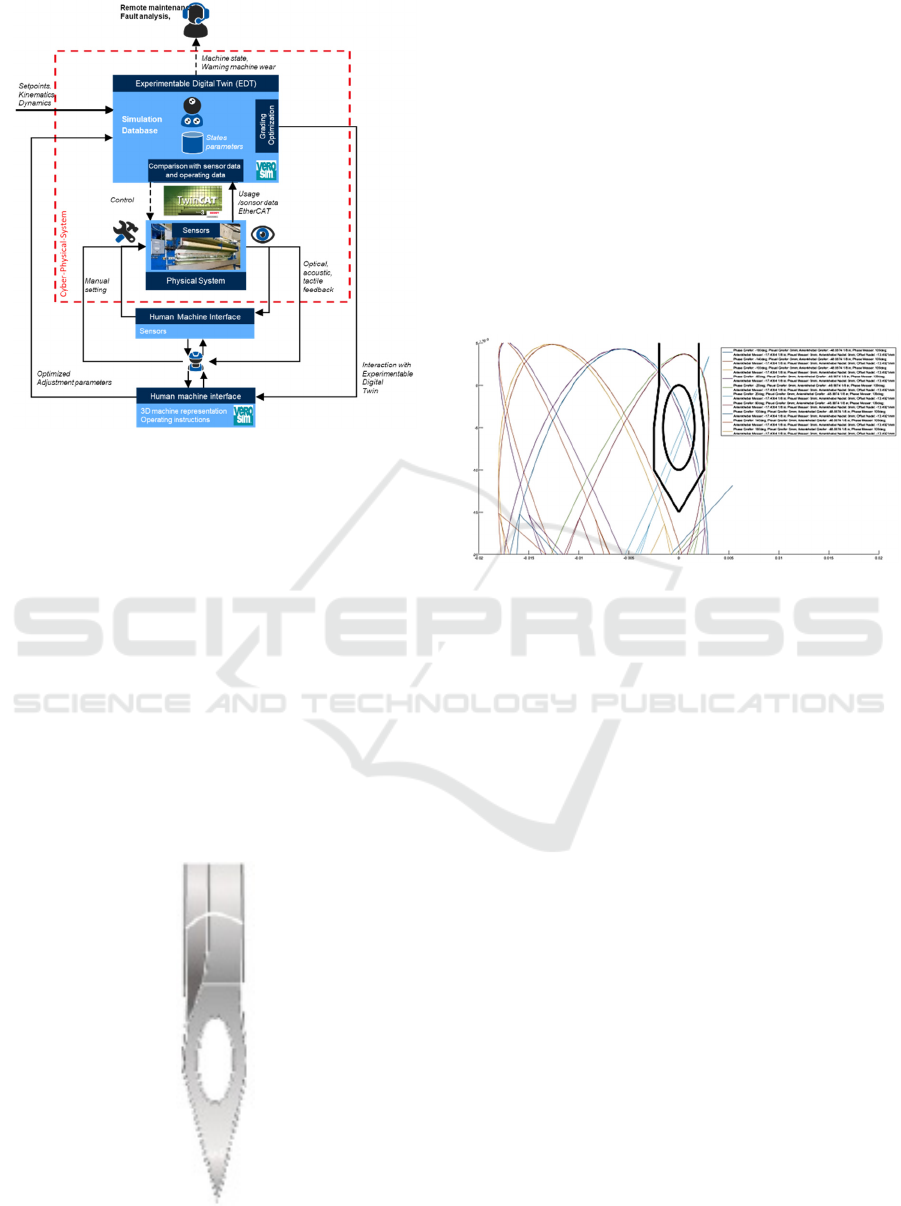
Figure 4: Conceptual description of the system.
The user interacts through a human machine
interface with the digital twin. The digital twin
consists of a database that can store old machine
settings and a simulation engine that can find new
enhanced settings.
5 ASSISTANCE SYSTEM FOR
INTUITIVE ADJUSTMENTS
Handbooks specify how the curves of gripper on the
needle must look like. It must hit the needle at the
phase, see Figure 5. Similarly, handbooks give
specifications of the relative curves of gripper and
knife or the stroke of the needle. However, if changes
Figure 5: Drawing shows the desired curve representing
gripper and needle relative positions from handbooks.
are made to the machine, e.g., due to wear or
production changes and now different tools are
needed, then it not obvious which parameters need to
change how much to get as close as possible to the
desired setup.
So, normally it is necessary to make some
adjustments based on the experience of the operator,
test the new settings, and then readjust the machine if
necessary. This can be a costly task.
Simulation however can test various machine
settings with a fraction of the cost.
At first the needle is adjusted to yield just the right
amount of stroke, and then the gripper is adjusted
accordingly.
Figure 6: Sketch of needle with curves of relative gripper
positions for varying parameters.
Once the desired specifications for the needle
have been met, we can simulate various curves of the
gripper relative to the needle and compare the curves
with the desired result, see Figure 6. A MATLAB was
written that compares the curves considering the hit
point, the direction, and the distance from the loop to
recommend a curve. The simulation range and step
width can be adjusted to meet the requirements of the
operator. The settings for the knife are then found
similarly by considering relative movement between
gripper and knife. The process can be adapted to other
textile machines.
The process of finding optimal parameters will be
the subject of another paper. Instead, in this paper I
want to focus on how the experimentable digital twin
can help to adjust the real machine according to the
newly found optimized parameter sets.
If the operator has found optimal settings, he
starts the assistance system. The system can show all
the necessary steps on the digital twin, yet it is able to
also use the HoloLens to display the steps on the real
machine or let a trainee operate on a machine that
looks and works just like the real machine but is only
virtual, thereby enabling training without access to a
real machine.
Assistance System for the Interactive Machine Adjustment (of a Tufting Machine)
375
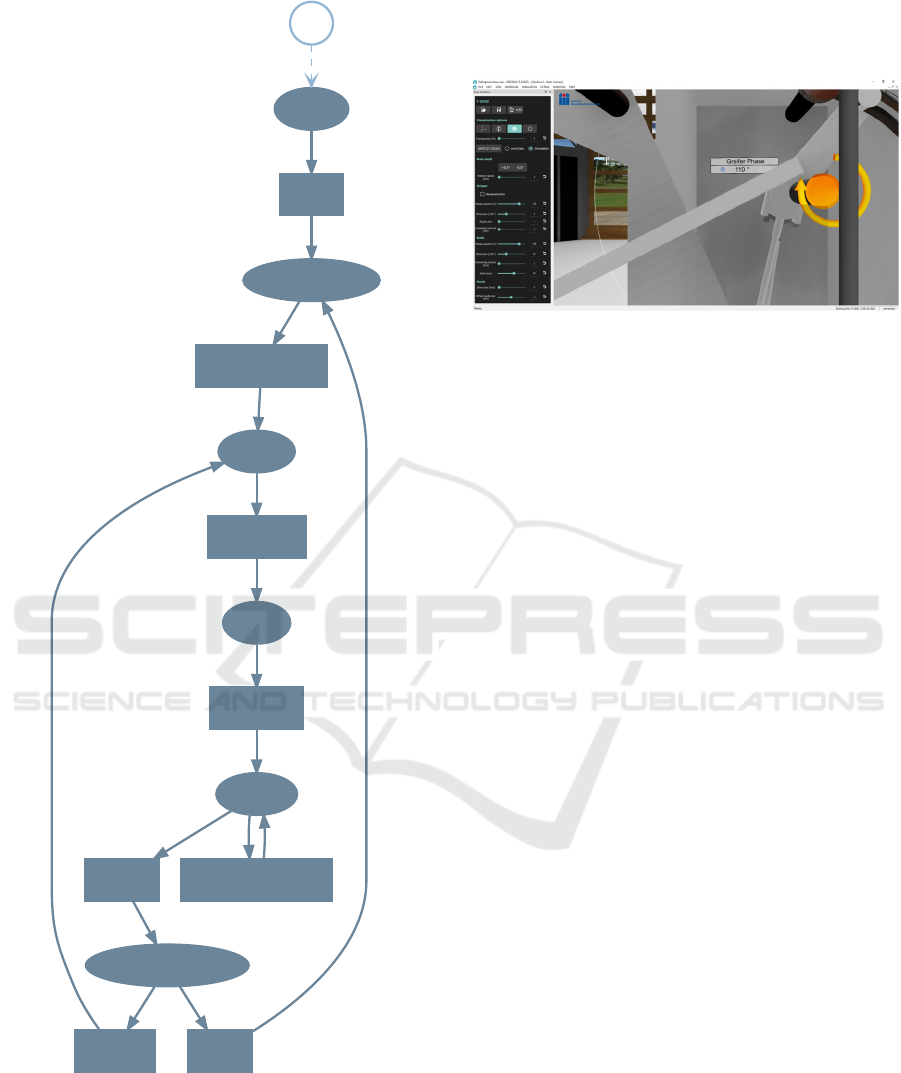
Figure 7: Process for the assistance system.
The process is shown in Figure 7. In the
initialization step a class containing among other
information the desired positions, a link to the
kinematics, and a camera view for each parameter is
created. “hideInstructions” makes sure that all panels
and arrows are hidden, e.g., if the adjustment process
is aborted.
Figure 8: Close-up view inside the machine showing pane
with instructions on how to adjust machine and an arrow
indicating that the operator should turn the excentre
clockwise.
The interactive part is started when the user
presses a predefined button. It then iterates over all
parameters and shows a board with the component to
change, the value the component needs to change and
an indication in which direction a value needs to
change, see Figure 8. It thereby transforms sensor
values and desired values from their mathematical
value to a meaningful representation for that machine,
e.g., move by 10° or move to notch 2/32. The needed
accuracy for continuous values was set to 0.1° or 0,5
mm but can be set according to the operator’s need.
The instructions are updated at every simulation step
to recalculate the required change as the operator
changes the value. If the desired and measured value
are within a tolerance the assistance system moves on
to the next unset parameter and repeats the process
until all parameters have their desired value.
6 DISCUSSION
Since many operators of tufting machines have
different backgrounds, it is expected that they can
benefit from an assistance system that gives intuitive
instructions how to adjust the tufting machine for a
given use case.
The experimentable digital twin has several
advantages over the real twin. Changes to machine
parameters are non-destructive, with one click an
adjusted value can be restored. The digital twin allows
simulation to search for optimal parameters, but it also
has access to the current state of the machine. Yet, it
can enhance the real machine by displaying additional
virtual information. Therefore, it combines features of
simulation and the real machine.
SOML Net structure of Instance Object Main
Begin
Init
Init_finished
hideInstructions
ready
keyPressed
Start
nextParam
adjust
finished updateInstructions
paramAdjusted
allSetnotAllSet
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
376

Benefits of using Twin CAT for the
communication between the sensors in the machine
and the digital twin are the frequent use of Twin CAT
in industry as well as the fast communication so that
the user gets feedback when he changes machine
values with little delay.
To ensure that the simulation produces viable
results, validation of the simulation model is necessary.
While some parts of the machine can be simplified it is
important that the tool movement is accurately
modeled so that the results found through simulation
can be transferred back to the machine, and if done so,
yield the expected results. To check visually that the
movement of the tools is similar, a camera was placed
in the machine and simulation, based on sensor data,
and the video can be compared, see Figure 9.
Figure 9: Camera and simulation alongside for validation.
For more accurate results the tool positions of the
simulation can be compared with the real tool
positions calculated from current sensor values. It
was found that at first the position was somewhat off,
but the simulation model was adjusted accordingly.
The real positions can be rendered on top, so at every
point in time it can be seen if the simulated and real
positions are close, see Figure 10. By calculating the
distance between two frames the error can be
quantified. It needs to be considered that the
movements of needle and gripper are idealized as
linear movements and only the linear component is
measured by the sensor.
Figure 10: Simulation of the tools with real tool positions
overlayed.
On the HoloLens the operator has his hands free
to adjust the machine but can see the instructions
simultaneously. Also, the HoloLens can be used to
visualize the tool movement with the current
parameters without turning the machine. In future, a
digital ghost of the target position of all machine parts
could also be shown alongside the instructions that
might even be more intuitively but when small
changes need to be made quantitative instructions
should yield more accurate results.
It is also suggested that the assistance system is
evaluated in practice, therefore it needs to be
extended for other set of tools or machines. Input
from industry experts can provide hints how the
usability of the assistance system might be enhanced.
It is expected that in the long run, an assistance
system can significantly reduce the time needed to
adjust a machine and thus reduce downtime and
ultimately cost. Evaluation could help quantify this
effect.
In further projects the experimentable digital twin
system shall be used for educational purposes to
demonstrate effects of errors in machine usage.
7 CONCLUSIONS
As was shown in this paper, manual tasks can benefit
from an assistance system that gives intuitive
instructions how to adjust machine settings for
different uses. An experimentable digital twin of a
tufting machine was developed that uses simulation
to find optimal adjustment parameters and a
simulation-based assistance system that uses real-
time sensor values to compare desired and actual state
and generate instructions to adjust the machine
accordingly. With time, the assistance system can be
extended with a database containing relevant settings
for different use cases. The benefits are repeatability,
reduced times to setup the machine, and a learning
environment for trainees. While the process was
shown and developed with a particular tufting
machine in mind, the system can be extended to other
tufting or textile machines with similar mechanics.
The main effort is in creating a digital twin – if a CAD
model of the machine already exists the system could
be adapted with minimal effort.
ACKNOWLEDGEMENTS
The writing of this chapter was enabled within the
context of the IGF project ‘Development of an
Assistance System for the Interactive Machine Adjustment (of a Tufting Machine)
377

experimentable digital twin for the analysis and
automated adaptation of textile manufacturing
processes using the example of tufting technology (T-
EXDIZ)’ 21166 N/2 of the Forschungsvereinigung
Forschungskuratorium Textil e.V.. It is funded via the
AiF within the framework of the program for the
promotion of joint industrial research and
development (IGF) by the Federal Ministry of
Economics and Energy based on a resolution of the
German Bundestag.
REFERENCES
Andre Schult, Lukas Oehm, Sebastian Carsch, Markus
Windisch, & Jens-Peter Majschak (2019). Selbst-
lernende Assistenzsysteme für Maschinenbediener.
Entwerfen Entwickeln Erleben EEE2019 Band 1, 159–
172.
Cichon, T. (2019). Der Digitale Zwilling als Mediator
zwischen Mensch und Maschine // The Digital Twin:
Mediator for Man-Machine Interaction [, RWTH
Aachen University]. Mendeley (via BibTeX-Export) //
DataCite.
G. Reinhart. (2015). Digital Twin - Synchronizing Reality
and Virtuality.
Grieves, M. (2014). digital twin: Manufacturing excellence
through virtual factory replication.
Haase, T., Termath, W., & Dick, M. Integration von VR-
und AR-Technologien in betrieblicher Lernphase.
Arbeitsalltag als Bildungsalltag. In Proceedings of
DELFI Workshops 2020. https://doi.org/10.18420/delfi
2020-ws-102
Hüsener, D., Schluse, M., Kaufmann, D., & Roßmann, J.
(2022). The Digital Twin as a Mediator for the
Digitalization and Conservation of Expert Knowledge.
In T. Schüppstuhl, K. Tracht, & A. Raatz (Eds.), Annals
of Scientific Society for Assembly, Handling and
Industrial Robotics 2021 (pp. 241–251). Springer
International Publishing. https://doi.org/10.1007/978-
3-030-74032-0_20
Minoufekr, M., Schug, P., Zenker, P., & Plapper, P. (2019).
Modelling of CNC Machine Tools for Augmented
Reality Assistance Applications using Microsoft
Hololens. In O. Gusikhin, K. Madani, & J. Zaytoon
(Eds.), Proceedings of the 16th International
Conference on Informatics in Control, Automation and
Robotics // ICINCO 2019: Proceedings of the 16th
International Conference on Informatics in Control,
Automation and Robotics: Prag, Czech Republic, July
29-31, 2019 (pp. 627–636). SCITEPRESS - Science
and Technology Publications; SCITEPRESS - Science
and Technology Publications Lda. https://doi.org/10.52
20/0007920806270636
Roßmann, J., & Schluse, M. (2020). Experimentierbare
Digitale Zwillinge im Lebenszyklus technischer
Systeme. In W. Frenz (Ed.), Handbuch Industrie 4.0:
Recht, Technik, Gesellschaft (pp. 837–859). Springer
Berlin Heidelberg. https://doi.org/10.1007/978-3-662-
58474-3_43
Schluse, M., & Rossmann, J. From simulation to
experimentable digital twins: Simulation-based
development and operation of complex technical
systems. In 2016 IEEE International Symposium on
Systems Engineering (ISSE) (pp. 1–6).
https://doi.org/10.1109/SysEng.2016.7753162
(Original work published 2016)
Werner Kritzinger, Matthias Karner, Georg Traar, Jan
Henjes, & Wilfried Sihn. (2018). Digital Twin in
manufacturing: A categorical literature review and
classification. In Elsevier (Ed.), 16th IFAC Symposium
on Information Control Problems in Manufacturing
INCOM 2018 (51st ed., Vol. 51, pp. 1016–1022). IFAC
Secretariat. https://doi.org/10.1016/j.ifacol.2018.08.474
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
378
