
Agnostic Middleware for VANETs: Specification, Implementation and
Testing
F
´
abio Gonc¸alves, Bruno Ribeiro, Oscar Gama, Maria Jo
˜
ao Nicolau, Bruno Dias, Ant
´
onio Costa,
Alexandre Santos and Joaquim Macedo
Centre Algoritmi, Univ. Minho, Portugal
Keywords:
VANETs, Middleware, Agnosticism, Protocol, API.
Abstract:
Vehicular Ad hoc Networks (VANETs) are the basic support for Intelligent Transportation Systems (ITS),
providing a framework for its multiple entities to communicate. The communications and services provided to
the road entities are generally implemented by means of an On-Board Unit (OBU) and Road Side Unit (RSU),
sharing a rather similar hardware and software architectures. These devices need to support multiple com-
munications types and provide access to the needed vehicle data to the applications. Most of the existing
solutions demand that the application developers have development control and knowledge about the OBU
internals. Thus, most applications are developed by OBU makers and implemented directly on it. However,
solutions based on middleware agnosticism separate the OBU internals and software development, facilitating
the application development by software makers or researchers. This paper proposes an Application Program-
ming Interface (API) and protocol that can easily be used to access the vehicle internals and services through
an agnostic architecture without any knowledge on how they are implemented.
1 INTRODUCTION
Intelligent Transportation Systems (ITS) is a set of
applications and services that aim to facilitate trans-
portation and make roads safer. It allows avoiding
road obstacles and traffic redirection.
Vehicular Ad hoc Networks (VANETs) are the un-
derlying communication network that enables the sev-
eral ITS nodes to communicate. The nodes can be di-
vided into infrastructural and road entities. The first
are usually entities with no movement located in the
infrastructure, and the latter the road vehicles. De-
pending on their physical location, the device that
enables vehicular communication to implement the
multiple services has different characteristics and des-
ignations; if it is located in the infrastructure Road
Side Unit (RSU), if on the road vehicles On-Board
Unit (OBU).
In the traditional approach, and following the ex-
isting architectures (ETSI ITS-G5, Communications
Access for Land Mobile (CALM), etc.), each man-
ufacturer develops its own applications and deploys
them directly in the OBU, transforming them into
a black box with a set of services and applications.
Thus, making it impossible for the development of
third-party applications and complicating the interop-
erability with OBUs from other manufacturers.
Authors in Dias et al. and Sousa et al. (Dias
et al., 2018; Sousa et al., 2017) propose a new ap-
proach on communications architectures for ITS by
adapting existing communications models defined, by
the most important standardization institutions, into
a more specific and modular architecture. It models
the OBU like a black box where all the lower-level
services are implemented. These services share the
same interface technologies and implemented func-
tionalities, covering the same functionalities as re-
ferred by European Telecommunications Standards
Institute (ETSI) ITS. Its main goal is to make it easily
adopted by the manufacturers and research develop-
ment and integration of independent application-level
software.
This agnostic architecture provides a separation
between the OBU internals and high-level applica-
tion development through the ITS-Local Communi-
cation Interface (ITS-LCI) (Dias et al., 2018; Sousa
et al., 2017) to interact using standard communica-
tion protocols and access technologies implemented
on the three service modules: Communication Ser-
vices Module, Information Services Module, Func-
tion Services Module.
The ITS-LCI should use a large bandwidth, low-
84
Gonçalves, F., Ribeiro, B., Gama, O., Nicolau, M., Dias, B., Costa, A., Santos, A. and Macedo, J.
Agnostic Middleware for VANETs: Specification, Implementation and Testing.
DOI: 10.5220/0011315100003286
In Proceedings of the 19th International Conference on Wireless Networks and Mobile Systems (WINSYS 2022), pages 84-92
ISBN: 978-989-758-592-0; ISSN: 2184-948X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

cost medium wired technology like Gigabit Ethernet,
support a network stack like User Datagram Proto-
col (UDP) over Internet Protocol (IP), and an applica-
tion management protocol like Simple Network Man-
agement Protocol (SNMP) (Harrington et al., 2002).
This work presents a well-defined protocol and
Application Programming Interface (API) for ac-
cess to the OBU’s lower layer services through the
ITS-LCI. Thus, allowing easy development of third-
party applications without the specialized knowledge
of the OBU’s internals. The proposed protocol uses
UDP and is encoded using the standard widely known
Abstract Syntax Notation One (ASN.1) format, facili-
tating an easy and quick development and deployment
in any system.
The remainder of the paper is organized as fol-
lows. Section 2 discusses the related work, presenting
other middleware architectures in the literature. Then,
in Section 3, the agnostic architecture that serves as
the basis for the development of this work is de-
scribed. Section 4 presents the API designed to access
the OBU internals through the agnostic architecture.
Section 5 evaluates the designed protocol, and, finally,
the conclusions are presented in Section 6.
2 RELATED WORK
VANETs are complex and heterogeneous networks,
and in the future, vehicles may use multiple types of
wireless communications. Thus, the implementation
of applications and technologies should be indepen-
dent of the underlying medium access communication
framework. Additionally, the same concept should be
applied to the transport and network level. This can be
achieved by applying a concept known as an agnostic
middleware communication layer. It can provide in-
dependent information management for multiple data
sources, allowing the communication over heteroge-
neous interfaces to be transparently supported over
different stacks.
CALM is a communication architecture defined
by the ISO Technical Committee 205 - Working
Group 16 (TC204 WG16). It is designed to allow in-
teroperability between Cooperative Intelligent Trans-
portation Systems (C-ITS) stations, and it abstracts
applications and services from the underlying com-
munication layers (Willke et al., 2009). The CALM
architecture defines a set of standard specifications
(Dias et al., 2018; Sousa et al., 2017), including ITS
Station Management, Communications Security, Fa-
cilities, Station Networking, Transport layer proto-
cols, Communication Interfaces and Services, Inter-
facing Technologies and ITS Station, and Distributed
Implementations ITS Stations, Interfacing ITS Sta-
tion to existing communication networks. . However,
it does not present detailed solutions for simultane-
ous usage of the different Vehicle to Anything (V2X)
communication technologies by multiple applications
in the same ITS station.
ETSI ITS-G5 is defined by the standard ISO
21217:2014 (WG16, 2014), which describes the ITS
station reference architecture. It consists of six parts:
Applications, Management, Facilities, Networking
and Transport, Access and Security. However, the
standard does not specify whether a particular ele-
ment should be implemented. It depends on the spe-
cific communication requirements. The most relevant
middleware support solution for application agnosti-
cism architecture on CALM was introduced by the
facilities layer (Some more recent alternatives were
proposed (Nour et al., 2011) (Costa, 2013) (Silva
et al., 2013) (Jawhar et al., 2013), but they can be
seen as forms of instantiation of the generic ETSI pro-
posal). However, the implementation of such middle-
ware might be very complex, needing knowledge of
many details of the lower layers. Thus, causing soft-
ware makers to lose their ability to choose the devel-
opment paradigm for their applications.
3 AGNOSTIC ARCHITECTURE
The Agnostic and Modular Architecture for the De-
velopment or Cooperative ITS Applications is an ar-
chitecture adapted from the modern ETSI and ISO
to be deployed on ITS and overcome the current ar-
chitecture standards shortcomings. Its goal is to en-
able middleware agnosticism, facilitating the devel-
opment of cooperative ITS applications and services
that use different communication technologies and
network/transport stacks to use the communication
medium transparently. It separates the OBU inter-
nals and the application development, enabling an
easier integration of applications developed by third
parties. Furthermore, the separation between user ap-
plications and OBU internals more easily fulfills the
strict safety and security requirements of the automo-
tive industry’s strongly regulated manufacturing and
deployment processes.
The agnostic ITS architecture supports all types
of vehicular applications using any programming
paradigm and taking full potential of a multi-medium
access capable OBU.
For this approach, the OBU should provide a
group of services, implementing all common fea-
tures needed for access to the vehicle’s internal data
sources, V2X communications, and lower-level auto-
Agnostic Middleware for VANETs: Specification, Implementation and Testing
85

motive functions. The interface to these services is
identified as ITS-LCI. It should be available through
technologies that are widely used and easily sup-
ported by all automotive manufacturers. Software ap-
plications implemented in the ITS station outside the
OBU would use the technologies defined for this in-
terface for access to the OBU internals.
As shown in (Dias et al., 2018; Sousa et al., 2017),
the OBU implements three modules, Communica-
tion Services Module, Information Services Module,
and Function Services Module, that are accessible
through the ITS-LCI.
Communication Services Module - Must permit
sharing of all the available OBU’s medium access
technologies, implement adequate multi-homing al-
gorithms, vertical hand-off, and related functions for
medium-access addressing, monitoring parameteriza-
tion, and security. Also, when available, implement
antenna configuration as no direct access to commu-
nication functions is possible from external services.
This module requires a bidirectional adaptation
to allow forwarding Protocol Data Units (PDUs) ar-
riving in the communication block/channels through
the ITS-LCI to the adequate application stack at the
network level, depending on their type, while imple-
menting efficient scheduling strategies.
Information Services Module - Must permit ac-
cess and manipulation of data generated by all sen-
sors, actuators, and other devices indirectly or di-
rectly connected to the OBU at rates and precision ad-
equate for the proper use of applications, some in al-
most real-time. Additionally, parameters such as sam-
pling rate and security access should be configurable,
preferably through configuration functions, but direct
manipulation, as long as adequate security mecha-
nisms are supported.
Function Services Module - Must permit access
to lower-level functions. These are atomic opera-
tional procedures implemented by the manufacturers
due to security, safety, performance, and liability is-
sues. These procedures can then be used to implement
all types of external applications with a higher-level
functionality.
4 AGNOSTIC MIDDLEWARE API
The ITS-LCI represents a standard bidirectional com-
munication technology that all parties need to imple-
ment to be able to use the functions provided by the
three previously mentioned services.
This section describes the protocol and API de-
veloped to allow any third-party application to easily
access the OBU internals without any knowledge of
how they are implemented.
The architecture (Figure 1) assumes two entities:
the communication server (to be deployed as the OBU
board) and the client application (to be deployed as a
host system on the same local area network).
Each application can implement its own network
protocol, independently of the communication inter-
face. The developed API provides a standard way to
access the services previously described.
Communications between applications and the
OBU are made over the widely known UDP, a very
simple and light internet protocol. It has no hand-
shake or confirmations, but the communications be-
tween all the parties happen inside the vehicle, in
close proximity, and over a high bandwidth physical
technology. Thus, the probability of errors or packet
loss is low. This protocol benefits, however, from its
low overhead.
The OBU can be accessed in two different ports,
depending on the operation type, as shown in Figure
1. In port 9011 is implemented a data exchange ser-
vice to be used by the client application. The sent
or received data is either typed (Context Awareness
Message (CAM), Decentralized Environmental No-
tification Message (DENM), Basic Safety Message
(BSM), Wave Service Advertisement (WSA), etc.) or
opaque.
Configuration of the server is attained by setting
configuration communication parameters through
primitives addressed to the configuration server UDP
port 9012. This port can also be used to check the
server configuration.
The port marked as XXXX and YYYY are ran-
domly attributed when opening the socket. The
XXXX port is used by the client application to receive
the response requests. The YYYY port is merely in-
dicative. It is a result of opening a socket for the client
application on the C PORT.
The API’s implementation uses different UDP
ports for the different operations, thus, isolating the
different operations and simplifying the API’s imple-
mentation.
The C PORT is used by the client application. It
is defined by the application at the moment of cre-
ation. It allows a device to have multiple applications
running and using the OBU’s services.
In the proposed protocol, the OBU is a com-
munication server that implements a data exchange
communication service to be used by any client ap-
WINSYS 2022 - 19th International Conference on Wireless Networks and Mobile Systems
86
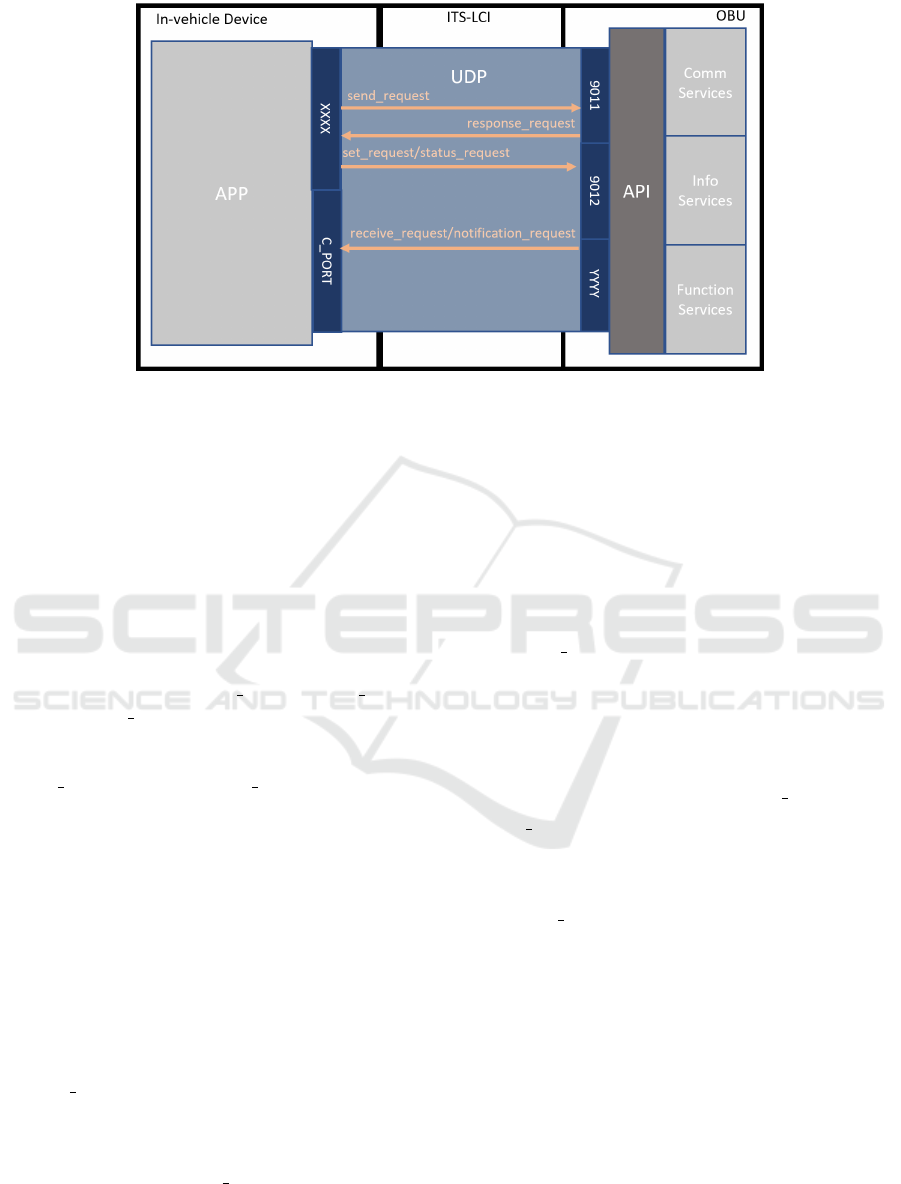
Figure 1: ITS-LCI communication architecture.
plication. The services are asynchronous and non-
confirmed over UDP.
4.1 Message Format
This section presents the different types of messages
supported by the current protocol version, their pay-
loads, and functionalities. Table 1 presents the multi-
ple configuration parameters that can be altered in the
OBU. It shows the identification code to be used, the
value type, and the parameter’s name and description.
These can be used in the set request, status request,
and notification request messages.
Table 2 shows the multiple error codes defined and
their description. These errors are only used by re-
sponse request and notification request messages.
The message format to be used for the communi-
cation between applications and the OBU is as follow:
• [Version] [Message ID] [Payload]
The field Version is an Integer that indicates the
current version of the protocol 0x01 is the first ver-
sion. Message ID represents the message identifier,
which is a 32-bit random value that univocally identi-
fies a particular request primitive through a reasonable
time period. The last field, Payload, is the payload of
the message. One of the 6 different payloads is per-
mitted:
• send request: Used for requesting the server to
send the included data using the IEEE 802.11p
protocol; the request should be sent to the data
communication server UDP port; the server shall
respond with a response request to the origin IPv4
+ UDP port of the client application. This payload
type also has a Data field.
– [Data]: Data can be untyped (Opaque) or one
of the following types: CAM, DENM, BSM,
WSA. When this field includes a typed data, it
does not refer to an exact syntax of the message
PDU of that standard; instead, it only speci-
fies data values that can be obtained from one
or more original standard message PDUs. It
should contain at least one byte of data and not
more than 1024.
• receive request: This primitive is for requesting
the client application to receive the included data;
the request should be sent to the pre-defined client
application UDP port; the client application shall
not respond to this primitive. This payload type
also has a Data field.
– [Data] Same as the one for send request.
• set request: Primitive for requesting a configura-
tion operation in the communication server; the
request should be sent to the configuration server
UDP port; the server shall respond with a re-
sponse request to the origin IPv4 + UDP port of
the client application. Note: when making a pure
abstract message specification, each tuple can be
replaced by an abstract parameter field combin-
ing identification and value. This payload also in-
cludes a list of parameters to be configured. The
list format is [Parameter ID][Parameter Value].
– [Parameter ID]: please refer to Table 1; please
note that some configuration parameters are de-
pendent on other higher-level parameters; for
example, the values used for 802.11p channel
numbers are dependent on the 802.11p regula-
tion domain; also there would be one 802.11p
channel number to be configured for each avail-
able medium antenna/port.: please refer to Ta-
Agnostic Middleware for VANETs: Specification, Implementation and Testing
87

ble 1; please note that some configuration pa-
rameters are dependent on other higher-level
parameters; for example, the values used for
802.11p channel numbers are dependent on the
802.11p regulation domain; also there would be
one 802.11p channel number to be configured
for each available medium antenna/port.
– [Parameter Value]: the size and meaning of
the parameters depend on their ID; when the
parameter ID refers to a parameter type that
can have a variable size, the value encodings
should include information about the parame-
ter size and, optionally, other relevant encod-
ing/decoding information.
• status request: Primitive for requesting informa-
tion about the communication server’s configura-
tion parameters; the request should be sent to the
configuration server UDP port; the server shall re-
spond with a response request to the origin IPv4
+ UDP port of the client application. This payload
also includes a list with the IDs of the parameters
to be consulted.
– [Parameter ID]: please refer to Table 1; when
there is the possibility of having multiple pa-
rameters with the same ID (like, for exam-
ple, all parameters related to each medium an-
tenna/port), the associated notification request
should only include the values of the param-
eters related to the set value of the respective
higher-level parameter.
• notification request: Primitive for requesting the
client application to receive the included notifica-
tion information; this information is directly re-
lated to previous send, set or status requests issued
by the client application and that can be identified
by the Message ID; when the Message ID refers to
a previous send request, than it permits the com-
munication server to inform the client application
of the success or failure of the data send operation
(is this case, the Error Value indicates the code
of the results of the operation); when the Mes-
sage ID refers to a previous set request, than it
permits the communication server to inform the
client application of the success or failure of the
attempted configuration operation (is this case,
the Error Value indicates the code of the results of
the operation and the included list of parameters
indicate the values after the attempted configura-
tion operation); when the Message ID refers to a
previous status request, than it permits the com-
munication server to inform the client application
of the success or failure of the attempted operation
(is this case, the Error value indicates the code
of the results of the operation and the included
list of parameters values indicate the current sta-
tus of the configuration parameters); the request
should be sent to the pre-defined client applica-
tion UDP port; the client application shall not re-
spond to this primitive. Note: when making a pure
abstract message specification, each parameter tu-
ple can be replaced by an abstract parameter field
combining identification and value. The notifica-
tion request primitive includes also an error value
and a list of parameters.
– [Error Value]: the error code associated with
the request primitive that the notification relates
to; please refer to Table 2.
– [Parameter ID];
– [Parameter Value];
• response request: Primitive for requesting the
client application to receive the included response
information; this information is directly related to
the previous send, set, or status requests issued by
the client application and that can be identified by
the Message ID; the server shall address this prim-
itive to the origin IPv4 + UDP port of the client
application. This payload type also includes an
Error Value.
– [Error Value];
Data to be sent by the communication server
should be addressed to its data server UDP port 9011
using a send request primitive. All information to
be received by the client application should be ad-
dressed to a pre-configured client application UDP
port (except for the response request primitive). The
receive request primitive should be used by the server
to send data to the client application on port C PORT,
while the notification request should be used to send
information about results on client requests to the
server.
The communication server also implements a con-
figuration communication service to be used by the
application client. The service is asynchronous and
non-confirmed. Configuration of the server is attained
by setting configuration communication parameters
through a set
request primitive addressed to the con-
figuration server UDP port 9012. The client applica-
tion can check for the server’s configuration by issu-
ing a status request to the configuration server UDP
port 9012.
The communication server should always re-
spond with a response request to any send request,
set request, or status request. The communication
server should respond if the request was accepted or
not (it does not imply any confirmation on the success
WINSYS 2022 - 19th International Conference on Wireless Networks and Mobile Systems
88
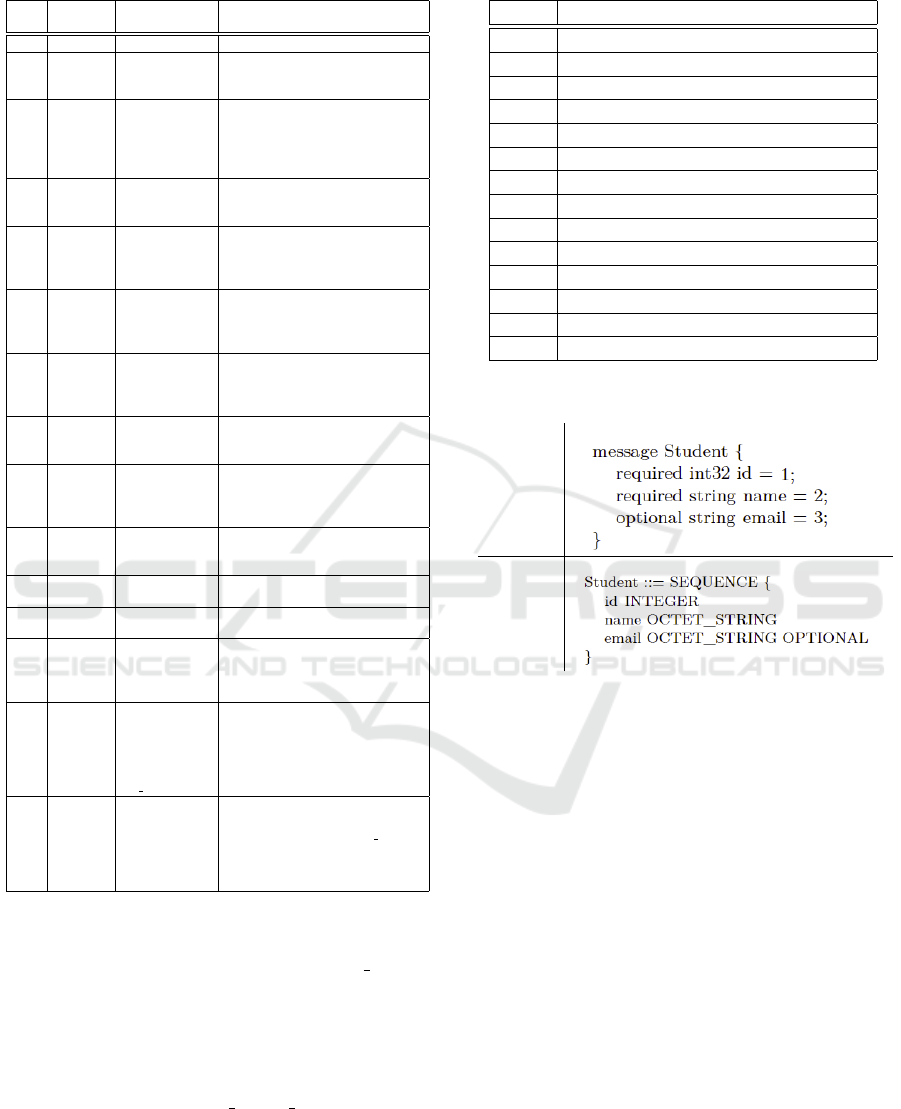
Table 1: Configuration Parameters.
ID Value
Type
Name Obs
0x00 NA All parameters Indicates all parameters available
0x01 Unsigned
Integer
Number
of Anten-
nas/Ports
Number of medium anten-
nas/ports
0x02 Unsigned
Integer
Active An-
tenna/Port
Antennas/Ports, when available
should be numbered sequentially
(0x01, 0x02, etc.); if no antenna is
temporarily available then values
should be 0x00.
0x03 Unsigned
Integer
Active Chan-
nel Number
The active channel number (for
example, 0xAE for channel 174)
on the active antenna/port
0x04 Unsigned
Integer
Active Chan-
nel Bandwith
The active channel band-
with/spacing, in MHz (for
example, 0x0A for 10 MHz) on
the active anetnna/port
0x05 Unsigned
Integer
Active Chan-
nel Center
Frequency
Range
The active channel frequency
range in MHz (for example,
0x16EE for 5870 GHz) on the ac-
tive antenna/port
0x06 Unsigned
Integer
Active Chan-
nel TX power
the active channel TX power, in
10
-3
dBm (for example, 0x59D8
for 23 dBm) on the active an-
tenna/port
0x07 Unsigned
Integer
Active Chan-
nel Data
Rate
The active channel data rate, in
Kbits/s (for exampe, 0x1770 for
7Mbits/s)
0x08 Unsigned
Integer
CAM Genera-
tion Rate
CAM generation rate in Hz (for
example, 0x0A for 10Hz); if gen-
eration is 0x00 the CAM genera-
tion is off
0x09 Unsigned
Integer
CAM Echoing
Mode
If value is 0x00 CAM echoing to
client application is off, otherwise
it is on
0x0A Unsigned
Integer
DENM Gener-
ation Mode
If the value is 0x00 the generation
is off, on otherwise
0x0B Unsigned
Integer
DENM Echo-
ing mode
Same as CAM echoing mode
0x0C String, 4
charac-
ters
Pre-defined
IPv4 Address
of the Client
application
”0.0.0.0” or ”255.255.255.255”
for broadcast on the IPv4 local
network.
0x0D Unsigned
Integer
Pre-defined
UDP ad-
dress port
of the client
application
(C PORT)
If the value equals to 0x00 then
no client application is set (for ex-
ample 0,0x1F90 for port number
8080)
0x0E Unsigned
Integer
Server Re-
quest Time
Out
The amount of milliseconds that
the client should wait for the re-
spective server’s response request
before it considers it was not re-
ceived, ignored or unattended (for
example, 0x64 for 0,1 seconds)
or failure of the sending of the data through the con-
figured communication technology or the success or
failure of the setting request). The response request
should always be sent to the client IPv4 address and
UDP port of the client application’s original request,
and it could be sent from any ephemeral UDP port on
the server (implementing a concurrent UDP server),
or from 9011 or 9012 UDP ports. After a period of
time defined by REQUEST TIME OUT (please re-
fer to 1), the client application can assume the request
was not received by the communication server.
The client application never responds to any prim-
itive received from the communication server, and all
Table 2: Error Codes.
ID Semantics
0x00 No error
0x01 Undefined Error
0x02 Service not available at that port
0x03 Unrecognizable message type
0x04 Maximum Payload Length surpassed
0x05 Unrecognizable message type
0x06 Unrecognizable data type
0x07 Unrecognizable Parameter ID
0x08 Mismatch on Parameter value
0x08 Unacceptable parameter value
0x0A Unsupported parameter value
0x0B Invalid number of parameters
0x0C Unable to send data
0x0D Not enough memory
Table 3: Protobuf and ASN.1 notation comparison.
Protobuf
ASN.1
communications are insecure.
4.2 Data Structure
The goal of this API is to provide a methodology
for easy access to the OBU internals. Thus, the data
should be structured using a widely known format that
simplifies its adoption and interoperability.
Two different methods of describing the structured
data were considered, Google’s protobuf (Google,
2022) and ASN.1 (ITU-T, 2022). In Table 3 is shown
a simple example of both methods.
Protobuf (Google, 2022) is a language-neutral,
platform-neutral mechanism for serializing structured
data. The data structure can be defined and then use a
specially generated code to easily read and write this
data to and from a variety of data streams. It is, com-
paratively, more recent, but it has gained some mo-
mentum in the last years.
ASN.1 (ITU-T, 2022) is a format for describing
data transmitted by telecommunication protocols. It
is independent of the language implementation and
the physical representation of the data.
Agnostic Middleware for VANETs: Specification, Implementation and Testing
89

Ideally, the chosen description language should
have tools that enable its translation directly to code,
thus, simplifying the implementation in any system or
language.
Google’s protobuf is more recent, and there are
far fewer tools, especially aimed at ARM processors.
The one tool found presented some bugs, crashing the
application each time the workload was increased.
ASN.1 has had more time to grow and evolve and
has many more tools available that allow its conver-
sion to multiple programming languages. So, it was
the description format chosen for the development of
the description of the messages. The data definitions
are shown next.
LTS-LCI DEFINITIONS AUTOMATIC TAGS::=
BEGIN
MessageHeader ::= SEQUENCE {
version INTEGER,
messageID INTEGER
}
CAMp2aMessage ::= SEQUENCE {
stationid INTEGER,
timestamp INTEGER,
latitude INTEGER,
longitude INTEGER,
heading INTEGER,
speed INTEGER,
acceleration INTEGER,
yawrate INTEGER
}
Parameter ::= SEQUENCE {
numberofantennas INTEGER OPTIONAL,
activeantennaorport INTEGER OPTIONAL,
activechannelnumber INTEGER OPTIONAL,
activechannelbandwith INTEGER OPTIONAL,
activechannelcenterfrequency INTEGER OPTIONAL,
activechanneltxpower INTEGER OPTIONAL,
activechanneldatarate INTEGER OPTIONAL,
camgenerationrate INTEGER OPTIONAL,
demngenerationmode INTEGER OPTIONAL,
demnechoingmode INTEGER OPTIONAL,
clientappip OCTET STRING OPTIONAL,
clientappcport INTEGER OPTIONAL,
serverrequesttimeout INTEGER OPTIONAL
}
DataType ::= ENUMERATED {
opaque (0)
}
Error ::= ENUMERATED {
noerror (0),
undefinederror (1),
servicenotavailableatthatport (2),
unrecognizableversion (3),
unrecognizablemessagetype (4),
maximumpayloadlengthsurpassed (5),
unrecognizabledatatype (6),
unrecognizableparatervalue (7),
mismatchonparametervalue (8),
unaceptlableparametervalue (9),
unsportedparametervalue (10),
invalidnumberofparameters (11),
unabletosenddata (12),
notenoughmemory (13)
}
ParameterID ::= ENUMERATED {
allparameters (0),
numberofantennas (1),
activechannelnumber (2),
activechannelbandwith (3),
activechannelcenterfrequency (4),
activechanneltxpower (5),
activechanneldatarate (6),
camgenerationrate (7),
camechoingmode (8),
demngenerationmode (9),
demnechoingmode (10),
clientappip (11),
clientappcport (12),
serverrequesttimeout (13)
}
Opaque ::= SEQUENCE {
datatype DataType,
data BIT STRING
}
Data ::= CHOICE {
opaque Opaque,
cam CAMp2aMessage
}
SendRequestMessage ::= SEQUENCE {
data Data
}
SetRequestMessage ::= SEQUENCE {
parameters Parameter
}
StatusRequestMessage ::= SEQUENCE {
parameterid INTEGER
}
ResponseRequestMessage ::= SEQUENCE {
error Error
}
ReceiveRequestMessage ::= SEQUENCE {
data Data
}
NotificationRequestMessage ::= SEQUENCE {
error Error,
parameters Parameter
}
WINSYS 2022 - 19th International Conference on Wireless Networks and Mobile Systems
90
Payload ::= CHOICE {
sendrequest SendRequestMessage,
receiverequest ReceiveRequestMessage,
setrequest SetRequestMessage,
statusrequest StatusRequestMessage,
resposerequest ResponseRequestMessage,
notificationrequest NotificationRequestMessage
}
MessageP2a ::= SEQUENCE {
messageheader MessageHeader,
payload Payload
}
5 PROTOCOL EVALUATION
The introduced overhead and overall message size
were measured through the implementation of a Java
application. One advantage of using ASN.1 is the
multitude of tools available that generate the code au-
tomatically, given the message definitions.
So, the application developed uses the ASN.1 for
the message definitions, which are then encoded us-
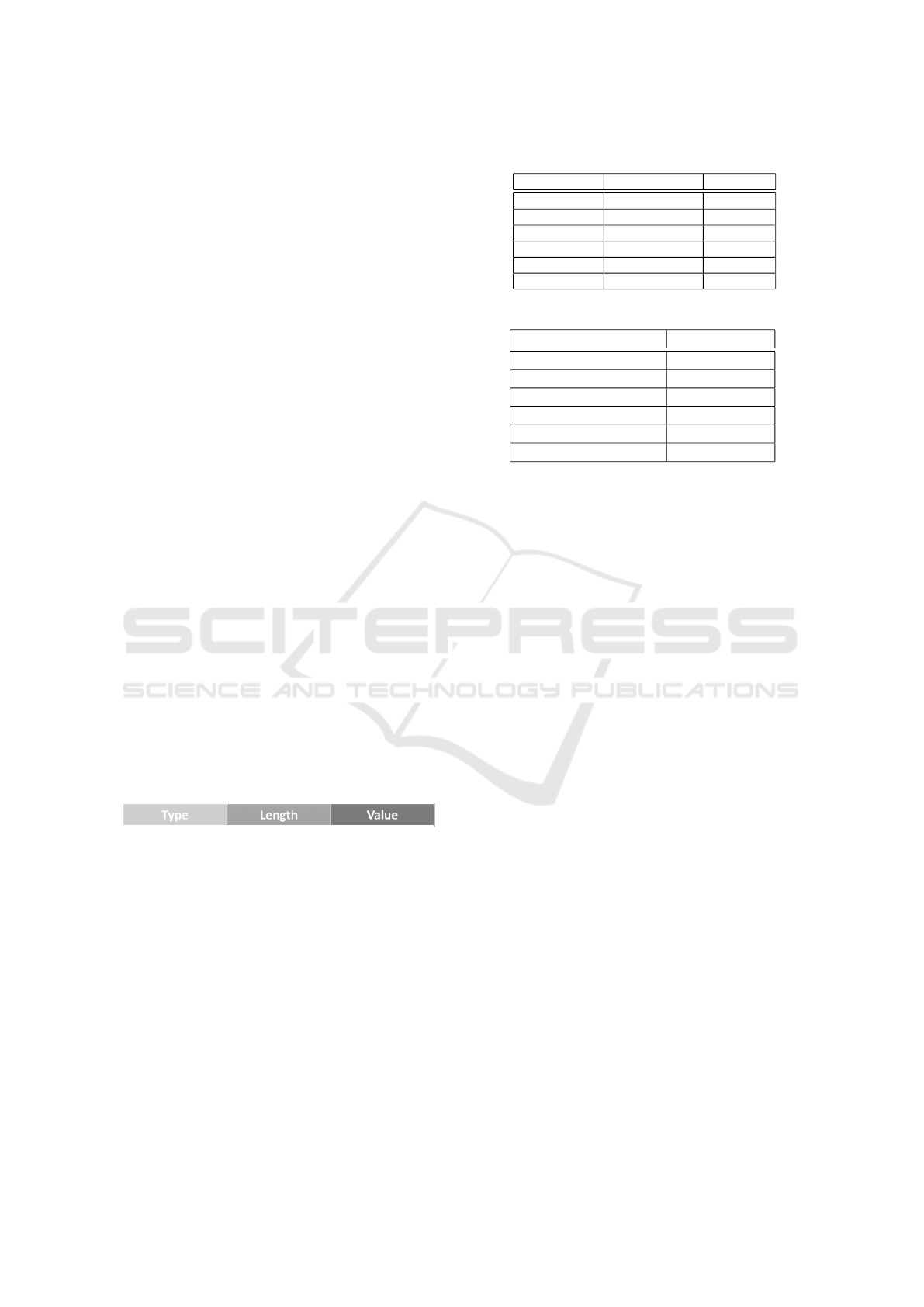
ing the Basic Encoding Rules (BER) (Mitra, 1994).
These define how information can be encoded using
binary. BER uses a Type Length Value (TLV) struc-
ture, as shown in Figure 2. The three components of
the structure can vary in size. The first (type) has, typ-
ically, a fixed size of 1 byte. The number of bytes oc-
cupied by the size information depends on the size of
the next component (value). A single byte is enough
if the information is smaller than 127 bytes. However,
if the value has 128 bytes or more, the length compo-
nent will need more than 1 byte. The last component
is the actual data of the element.
Figure 2: BER TLV structure.
The message types previously defined can be di-
vided into two types, depending on their format.
SendRequest and ReceiveRequest, may have different
payloads with different sizes depending on the data
size or if they are Opaque or CAM. If the data type is
CAM, the data size is also fixed.
The rest of the messages, NotificationRequests,
SetRequest, StatusRequest, NotificationRequest, and
ResponseRequest do not have payloads with different
sizes but fixed parameters and error messages.
In the first group of messages, their message size
and, more specifically, the overhead introduced was
evaluated and is shown in Table 4. In Table 5, the
message size for the other message types is shown. To
Table 4: Message size comparison (Bytes).
Payload Size Encoding Size Overhead
1 25 24
10 34 24
100 124 24
200 230 30
300 336 36
1000 1036 36
Table 5: Message size comparison (Bytes).
Message Type Encoding Size
SendRequest CAM 42
ReceiveRequest CAM 42
ResponseRequest 19
SetRequest 64
StatusRequest 17
NotificationRequest 67
be noticed that all the messages have an ID. So, the
total overhead of the messages can vary depending on
this value. This table also includes SendRequests and
ReceiveRequests when used with CAMs as the pay-
load because, in this case, they also have fixed sizes.
Table 4 presents the overhead introduced in the
messages that may have different size payloads
(SendRequest, ReceiveRequest). As both message
types have the same format, their size and overhead
are equal. The columns indicate the original size of
the data payload, the size after the encoding process,
and the total overhead. All the mentioned message
types introduce the same overhead, so only one table
is presented for all of them. The overhead introduced
depends on the payload size being 24 bytes for pay-
loads smaller than 200 bytes, 30 bytes for messages
smaller than 200 bytes, and 36 bytes for messages
bigger than 300 bytes. Thus, the introduced overhead
is very small, and it is almost negligible for messages
bigger than 100 bytes. The overhead increases with
the size of the message due to the TLV structure of
the BER encoding. As previously stated, the length
component of the TLV is variable and increases with
the size of the data encoded.
The size of the other messages can be seen in Ta-
ble 5. This table shows the message size after encod-
ing for each message type that does not have a vari-
able payload size.
Any of the defined messages with a fixed size is
smaller than 70 bytes. The biggest one is the Notifi-
cationRequest and the smallest StatusRequest. So, it
seems to have small enough sizes for in-vehicle com-
munications, either over wireless or wired mediums.
The evaluation of the protocol only considered the
overhead introduced by the multiple message types.
Encoding speed or delay introduced are metrics that
Agnostic Middleware for VANETs: Specification, Implementation and Testing
91

heavily rely on external factors. The encoding speed
depends on the supporting device characteristics or
the coding of the application. The delay introduced
can be measured in two different places. The first is
during the message encoding. This metric suffers the
same problem of the encoding speed. The other is
the delay introduced in the message exchange. As the
overhead introduced is very small and ideally trans-
mitted over high bandwidth mediums, the delay in-
troduced in the connection is negligible.
6 CONCLUSIONS
This paper presents an architecture for an agnostic
middleware and its corresponding API, as well as a
protocol specification and implementation. The pre-
sented protocol allows third-party applications to eas-
ily take advantage of an agnostic architecture. It al-
lows applications to easily access the vehicle’s data
sources without any knowledge of the OBU internals.
The API’s messages are defined using the ASN.1
notation over the UDP protocol. ASN.1 is a widely
used and accepted format for describing data trans-
mitted over communication protocols and is indepen-
dent of the data’s implementation language and phys-
ical representation, permitting its easy adoption.
The protocol was evaluated in terms of overhead
introduced. Evaluating the encoding speed and com-
munication time was not performed because it de-
pends on external factors. The overhead introduced
is minimal, with only 24 bytes in messages of 100
bytes and 36 for messages of more than 300 bytes.
The current implementation does not have any
security considerations. It is an in-vehicle proto-
col communication deployed in the same local area
network, which is considered a secure environment.
Nonetheless, it is to be investigated the impact and
need for security mechanisms.
The API and protocol are functional and allow ac-
cess to the configuration parameters and services. It
was the basis for the implementation of a platoon-
ing application tested with success in the real world.
Currently, the OPENC2X (Laux et al., 2016; Klingler
et al., 2017) platform is being extended to support the
developed API. Nonetheless, it is still evolving, with
new functionalities being implemented.
ACKNOWLEDGEMENTS
This work has been supported by FCT – Fundac¸
˜
ao
para a Ci
ˆ
encia e Tecnologia within the R&D Units
Project Scope: UIDB/00319/2020.
REFERENCES
Costa, R. (2013). VADM - A common API for agnostic ap-
plication development within VANETs. In Proceed-
ings Elmar - International Symposium Electronics in
Marine, pages 365–368.
Dias, B. et al. (2018). Agnostic and Modular Architec-
ture for the Development of Cooperative ITS Applica-
tions. Journal of Communications Software and Sys-
tems, 14(3):218–227.
Google (2022). Protocol Buffers. Online,
https://developers.google.com/protocol-buffers
(accessed on 2022-04-20).
Harrington, D. et al. (2002). An architecture for describing
simple network management protocol (snmp) man-
agement frameworks.
ITU-T (2022). ASN.1. Online, https://www.itu.int/en/ITU-
T/asn1/Pages/asn1 project.aspx (accessed on 2022-
04-20).
Jawhar, I. et al. (2013). An overview of inter-vehicular com-
munication systems, protocols and middleware. Jour-
nal of Networks, 8(12):2749–2761.
Klingler, F. et al. (2017). Poster: Field Testing Vehicu-
lar Networks Using OpenC2X. In Proceedings of the
15th Annual International Conference on Mobile Sys-
tems, Applications, and Services, MobiSys ’17, page
178, New York, NY, USA. Association for Computing
Machinery.
Laux, S. et al. (2016). Demo: OpenC2X — An open
source experimental and prototyping platform sup-
porting ETSI ITS-G5. In 2016 IEEE Vehicular Net-
working Conference (VNC), pages 1–2.
Mitra, N. (1994). Efficient Encoding Rules for ASN.1-
Based Protocols. AT&T Technical Journal, 73(3):80–
93.
Nour, S. et al. (2011). Middleware for Data Sensing and
Processing in VANETs. In 2011 International Con-
ference on Emerging Intelligent Data and Web Tech-
nologies, pages 42–48. IEEE.
Silva, F. A. et al. (2013). ConProVA: A smart context provi-
sioning middleware for VANET applications. In IEEE
Vehicular Technology Conference.
Sousa, S., Santos, A., Costa, A., Dias, B., Ribeiro, B.,
Gonc¸alves, F., Macedo, J., Nicolau, M. J., and Gama,
´
O. (2017). A New Approach on Communications
Architectures for Intelligent Transportation Systems.
Procedia Computer Science, 110:320–327.
WG16, I. T. C. . (2014). ISO 21217: 2014: Intelligent trans-
port systems-Communications access for land mo-
biles (CALM)-Architecture.
Willke, T. et al. (2009). A survey of inter-vehicle commu-
nication protocols and their applications. IEEE Com-
munications Surveys and Tutorials, 11(2):3–20.
WINSYS 2022 - 19th International Conference on Wireless Networks and Mobile Systems
92
