
A Lightweight Machine Learning Pipeline for LiDAR-simulation
Richard Marcus
1 a
, Niklas Knoop
2
, Bernhard Egger
1 b
and Marc Stamminger
1 c
1
Chair of Visual Computing, Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg, Germany
2
Elektronische Fahrwerksysteme GmbH, Germany
Keywords:
Autonomous Driving, LiDAR, General Adversarial Neural Network, Image-to-image Translation.
Abstract:
Virtual testing is a crucial task to ensure safety in autonomous driving, and sensor simulation is an important
task in this domain. Most current LiDAR simulations are very simplistic and are mainly used to perform initial
tests, while the majority of insights are gathered on the road. In this paper, we propose a lightweight approach
for more realistic LiDAR simulation that learns a real sensor’s behavior from test drive data and transforms this
to the virtual domain. The central idea is to cast the simulation into an image-to-image translation problem.
We train our pix2pix based architecture on two real world data sets, namely the popular KITTI data set and
the Audi Autonomous Driving Dataset which provide both, RGB and LiDAR images. We apply this network
on synthetic renderings and show that it generalizes sufficiently from real images to simulated images. This
strategy enables to skip the sensor-specific, expensive and complex LiDAR physics simulation in our synthetic
world and avoids oversimplification and a large domain-gap through the clean synthetic environment.
1 INTRODUCTION
Even though Autonomous Driving (AD) and Ad-
vanced Driver Assistance Systems (ADAS) have been
a major research areas for more than a decade, the
adoption into practical driving systems is dragging on.
With the lacking capabilities of current algorithms to
adapt to unforeseen situations, a big challenge is test-
ing the performance of such systems safely. A key
part to achieve this vision is the realistic simulation of
the car sensors such as cameras, LiDAR or RADAR.
Simulating such sensors in a virtual environment is
costly, in particular if the virtual sensors should suffer
from the same physical limitations and imperfections
as their real counterpart.
A typical approach are physical based simula-
tions, which require extensive data about the sensor
specifics and a careful implementation. A more desir-
able option is to learn the behavior of a particular sen-
sor from recorded real test drive data and to transfer
this to a virtual sensor. The process should be mostly
automatic, in order to easily adapt the simulation to
new models and types of sensors.
The core idea of this paper is to tackle the problem
as an image-to-image translation task. In particular,
a
https://orcid.org/0000-0002-6601-6457
b
https://orcid.org/0000-0002-4736-2397
c
https://orcid.org/0000-0001-8699-3442
we consider the simulation of LiDAR sensors, which
send out light beams in a uniform cylindrical grid and
measure the time of flight and thus the distance of the
scene point visible in this particular direction. If there
is no hit point (sky), the hit point absorbs the light
(dark surfaces), or does not reflect back (mirroring
surface) or multiple reflections interfere, no measure-
ment is returned. Of course, the possibilities to learn
sensor behavior strongly depend on the available test
drive (and thus ground truth data).
Relevant for our purpose are a RGB camera
stream and a synchronized stream of LiDAR points.
Our concept is shown in Fig. 1: from recorded test
drive data, we learn the transfer from RGB camera
images to LiDAR images using the Pix2Pix architec-
ture (Isola et al., 2018). Fig. 1 already shows a po-
tential challenge of the approach: real and simulated
RGB images still have significantly different charac-
teristics. It is unclear, how much this gap between real
and simulated imagery influences the outcome in the
simulation. We thus examine other input image types,
e.g. depth images, or segmentation images, where the
real-2-sim gap might be smaller.
In this study, we explore variants of this idea and
show that it is possible to learn a plausible LiDAR
simulation solely from test drive data, in our case
KITTI and A2D2. Our simulation runs in real-time
and can thus be integrated in a virtual test drive sys-
176
Marcus, R., Knoop, N., Egger, B. and Stamminger, M.
A Lightweight Machine Learning Pipeline for LiDAR-simulation.
DOI: 10.5220/0011309100003277
In Proceedings of the 3rd International Conference on Deep Learning Theory and Applications (DeLTA 2022), pages 176-183
ISBN: 978-989-758-584-5; ISSN: 2184-9277
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

simulation
training
test drive data
rendered data
test drive LiDAR
simulated LiDAR
image-to-image translation
Figure 1: We learn the translation from real world RGB to
LiDAR data from test drives. We use this learned mapping
to derive LiDAR output from rendered RGB images.
tem. We compare the different modalities of input
images and ablate which are most suitable for our
learned LiDAR simulation strategy. We evaluate our
idea by examining how well ground truth LiDAR data
can be reproduced with our approach, and how well
we can predict real LiDAR measurements from syn-
thetic rendered data using the second revision (Cabon
et al., 2020) of the Virtual KITTI data set (VKITTI).
2 RELATED WORK
Simulation Environments. Many modern sim-
ulation environments like LGSVL (LG, 2021),
CARLA (Dosovitskiy et al., 2017) or Intel Air-
sim (Shah et al., 2017) build on game engines to offer
high quality graphics and profit from their develop-
ment and communities. Additionally, there are dif-
ferent ADAS integrations, sensor configurations and
simulation settings, e.g. weather or traffic, to support
many use cases of automotive simulation. Other tools
like VTD (VTD, 2021) or IPG Carmaker (Automo-
tive, 2020) focus on supporting their own software
stack and promise a more complete solution.
These environments also offer sensor simulations.
Yet, existing LiDAR simulations are usually simplis-
tic and not sufficient to test ADAS or autonomous ve-
hicles, so we see potential for our approach here. To
integrate our approach into these systems, we only
need to get access to rendered RGB images, their
depth buffer, or segmentation masks, so the integra-
tion of a new module that transfers these images to
LiDAR sensor output is very simple.
Nvidia DRIVE Sim (NVIDIA, 2021) is different
in this regard, as it builds on the direct cooperation
with LiDAR companies to offer better integrations.
However, while there exist relatively realistic physics
based simulations, these are locked into the Nvidia
ecosystem, so we see them as rather complementary
to our accessible data based approach.
Furthermore, our approach makes it possible to
learn the behavior of new LiDAR sensor boxes only
based on test drive data, without knowing or tuning
the internal physical parameters.
Data Sets. Many high quality data sets from test
drives have emerged in recent years (Sun et al., 2020)
(Uhrig et al., 2017) and the trend continues (Liao
et al., 2021). LiDAR data is very common to be in-
cluded in these data sets, which makes them compat-
ible with our approach. The usual representation for-
mat are LiDAR point clouds. For each such point,
there is a position, an intensity value and a time stamp.
Using the sensor orientation and offset between the
RGB camera, it is possible to compute a 2D LiDAR
projection. Often, this format is already included in
the data sets directly or the necessary projection ma-
trices are given. Notably, (Gaidon et al., 2016; Cabon
et al., 2020) replicates KITTI scenes virtually with a
semi-manual process, thereby providing ground truth
data like depth and semantic segmentation. This al-
lows us to compare how well our trained network is
able to generalize between synthetic and real data on
the same driving data sequences.
Image-to-image Translation. In a way, the 2D Li-
DAR projection can be interpreted as a special seg-
mentation of the RGB image using two classes: vis-
ible by the LiDAR sensor and not visible. Conse-
quently, the popular U-Net architecture (Ronneberger
et al., 2015), using an encoder network, followed by a
decoder network, immediately suggests itself. How-
ever, to simulate the actual LiDAR pattern in the
projection, it is also important that unrealistic out-
puts are penalized. This can be achieved efficiently
with General Adversarial Networks (GANs) (Good-
fellow et al., 2014), where a discriminator is opti-
mized that estimates whether an image is fake or not.
Pix2pix (Isola et al., 2018) combines the strength of
U-Nets and an adversarial loss and demonstrated suc-
cess for very diverse image domains. There are also
approaches that perform this task in an unpaired fash-
ion (Zhu et al., 2020), but for the pipeline proposed in
this paper, we can assume that paired images exist.
Building on pix2pix, pix2pixHD (Wang et al.,
2018a) and SPADE (Park et al., 2019) have improved
the quality of results via adapting the architecture
more towards specific data domains.An alternative
would be the direction of style transfer (Johnson et al.,
2016). Following this approach, one could use an av-
erage LiDAR projection and apply it to different im-
ages. Given the available data, which offers a spe-
cific LiDAR projection for each individual input im-
A Lightweight Machine Learning Pipeline for LiDAR-simulation
177

age, image-to-image translation is a better fit for our
purposes.
Learning based Sensor Simulation. A very in-
teresting approach for LiDAR simulation is pseudo-
LiDAR (Wang et al., 2018b). It is similar in regard
to how point clouds are generated based on RGB im-
ages and depth prediction networks. However, the end
goal of this method is to improve image based ob-
ject detection, while our pipeline is more general and
generates realistic LiDAR data on purpose as an in-
termediate representation to be used to train various
downstream applications.
On a conceptual level, we pursue the same ap-
proach as L2R GAN (Wang et al., 2020), but try to
learn the mapping between camera images and cam-
era LiDAR projections instead of the one between
bird’s eye view LiDAR and radar images.
The closest approach to ours is LiDARsim (Mani-
vasagam et al., 2020). It also aims at realistic simu-
lation of LiDAR leveraging real world data but use a
physics based light simulation as foundation. To ob-
tain realistic geometry, a virtual copy is reconstructed
by merging multiple scans from test drives. Instead
of directly predicting the LiDAR point distribution
based on camera images, LiDARsim first uses ray
casting in this virtual scene to create a perfect point
cloud. Based on these and the LiDAR scans from the
test data, the network then learns to drop rays from
the ray casted point clouds for enhanced realism.
With our method, we try to achieve a more
lightweight LiDAR simulation for situations where
such preprocessing is not feasible. For direct integra-
tion into external simulation environments, a solution
is required that does not dependend on high quality
geometry data.
3 TRAINING AND SIMULATION
3.1 LiDAR Images
To learn and simulate the behaviour of LiDAR sen-
sors, we map our problem to an image-to-image trans-
lation task. Therefore, we convert the LiDAR output
to an image which we call LiDAR image. We notice
that the problem of LiDAR simulation in a virtual en-
vironment is not the measured distance of a particular
sample, as this can easily be determined by ray cast-
ing. Instead, we need to decide which LiDAR rays
return an answer and which do not, e.g. due to ab-
sorption, specular reflection, or diffusion. We map
this information to a LiDAR image, that tells us for a
particular view direction, whether a ray in this direc-
tion is likely to return an answer.
To this end, we project the LiDAR point cloud into
the camera view, which requires that we know the rel-
ative pose of LiDAR and camera and that the outputs
of all devices are aligned temporally and have a times-
tamp. An example is shown in Fig. 2(b). The binary
image shows, which regions are visible for the sensor,
but also which problems arise when trying to predict
them: Since camera and LiDAR sensor usually do not
have the same optical center, the position of the pro-
jection varies with depth. A network has to predict
depth implicitly to output dots at the proper position.
We thus blur the binary image with a simple Gaus-
sian filter, as shown in Fig. 2(c), Note that we color
coded the result for better visualization. The result-
ing map is denser, so (i) it better abstracts from the
exact sample positions and (ii) the map is easier to
predict. The size of the Gaussian filter is chosen such
that gaps between neighboring dots are filled, but also
such that invisible regions are not filled up wrongly.
It depends on the scan pattern of the LiDAR and the
image resolution, which we choose in turn depending
on the horizontal and vertical distribution. In our ex-
amples, we use a Gaussian blur with σ = 8 to make
up for the sparsity in the A2D2 data set (image reso-
lution 1920 × 1208) and a rather small intervention
for KITTI (image resolution 1242 × 375), only us-
ing a small 5x5 custom kernel as shown in Fig. 2(c).
There are also more elaborate ways of augmenting the
data (Shorten and Khoshgoftaar, 2019), but the basic
blurring we use is well suited for LiDAR data and re-
sulted in a sufficient improvement of the training re-
sults.
The blurring also helps to hide another, more sub-
tle inconsistency: usually, the camera frame rate is
higher than that of the LiDAR. However, to get a full
LiDAR pattern, we project all points from a single
complete LiDAR scan to each camera frame. Ad-
ditionally, each LiDAR sample comes from another
time interval, resulting in a rolling shutter effect. By
blurring and interpolating all this, we achieve a less
sharp, but more consistent visibility mask. The Li-
DAR image also contains information about the scan
pattern of the LiDAR, and can even be used to repre-
sent the result of multiple LiDAR sensors, as in the
A2D2 dataset shown in Fig. 2(d).
3.2 LiDAR Simulation
Our hypothesis is that an image-to-image translation
of an RGB image to a LiDAR image should be well
possible, since in an RGB image it is possible to
detect LiDAR-critical regions, such as sky, far dis-
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
178

(a) RGB image from the KITTI data set.
(b) LiDAR points projected into same view.
(c) Blurred and color coded LiDAR image.
(d) LiDAR images from two different data sets (left: KITTI,
right: A2D2 with five sensors resulting in a grid pattern)
Figure 2: LiDAR image generation.
tances, or transparent/mirroring surfaces (e.g., win-
dows). However, it is unclear how well the network
trained on real data generalizes to rendered and thus
much cleaner images.
We furthermore hypothesize that a translation to
LiDAR images is also possible from depth images
or from segmentation images. Such images are very
simple to generate in a driving simulation, however
these are not generally available as ground truth data
for training and thus have to be derived (e.g. using
depth estimation networks), or generated manually
(e.g. segmentation masks).
In the following, we explore all these options, see
Fig. 3. In particular, we describe how to generate the
input data, how our image-to-image transformation is
done, and how we integrated all this into a virtual test
environment.
3.3 Training Data
We use two data sets to generate our training data:
• KITTI: We use the training set (Weber et al.,
2021) from the Segmenting and Tracking Every
Pixel Evaluation benchmark, since it also includes
segmentation data. We make a slight variation to
the validation set and only include the sequences
that are present in VKITTI. This results in roughly
6000 training and 2000 validation images
• A2D2: We leave about 20000 images for train-
ing and create a validation set from three different
test drives, one in a urban setting, one on a high-
way and one on a country road making up 6000
images. In contrast to many other data sets, A2D2
uses five low resolution LiDAR sensors in tandem
to achieve sufficient point density.
The KITTI and A2D2 dataset create different Li-
DAR patterns, which allows us to test our approach
on different point layouts (see Fig. 2d). Our learn-
ing based approach overcomes the need to implement
the physics of each sensor for implementation and en-
ables to learn the sensor properties for a simulated en-
vironment.
As input to our image-to-image network we con-
sider RGB camera images, depth images, and/or seg-
mentation masks. Ground truth depth maps are usu-
ally not available, so we derive them using mono
depth estimation (Ranftl et al., 2021). If ground truth
segmentation masks are not available, they can be
estimated using segmentation networks, e.g. (Ranftl
et al., 2021; Kirillov et al., 2019). As forth option,
we combine camera, depth, and segmentation images
by merging a grey scale version of the camera image,
depth, and segmentation label. To avoid the use of the
same value for different semantic objects, the colors
of the class labels are mapped to specific grey values.
Overall, we follow the set of more than 50 different
classes defined by A2D2. The color encoding also in-
cludes instance segmentation of up to four instances
per class so that overlapping objects can be discerned.
3.4 Image-to-image Translation
Many different network architectures for image-to-
image translation have been presented, our exper-
iments have shown that pix2pix and even sim-
pler encoder-decoder architectures like U-Nets (Ron-
neberger et al., 2015) deliver satisfying results as also
shown by LiDARsim (Manivasagam et al., 2020). We
A Lightweight Machine Learning Pipeline for LiDAR-simulation
179
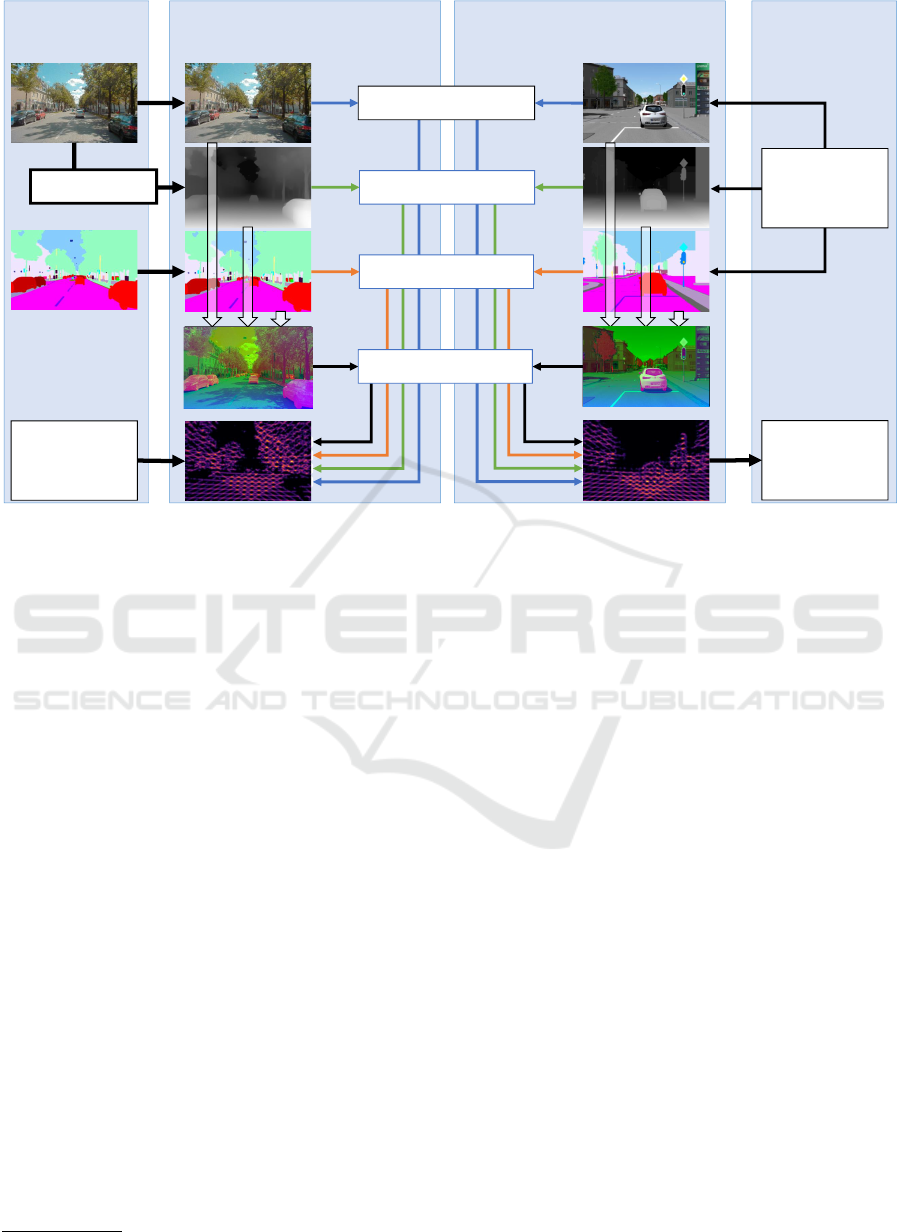
inferencetrainingtest drive data
a2d2 / KITTI
LiDAR
point cloud
training images
combined combined
RGB → depth
RGB → LiDAR
depth → LiDAR
seg → LiDAR
com → LiDAR
simulation
environment
Virtual
Test
Drive
rendered images
LiDAR
point cloud
Figure 3: Overview over training and inference of our LiDAR simulation. We explore prediction of LiDAR point clouds
based on RGB, depth and segmentation images separately and combined. We train on real RGB and LiDAR pairs and apply
the learned mapping on rendered image to synthesize realistic LiDAR images.
apply a widely used implementation
1
which is based
on a U-Net architecture and a convolutional Patch-
GAN classifier as proposed in the original pix2pix
paper (Isola et al., 2018). We leave the network ar-
chitecture unchanged but omit the preprocessing step
that crops and flips the pictures randomly. This step
is problematic for LiDAR projections as they are de-
pendent on the camera perspective and not necessarily
symmetric.
Our experiments have shown that deviations in the
basic parameters of the architecture only show little
effect. For the presented results we used the follow-
ing configuration: Adam optimizer with learning rate
of 2 ∗ 10
−4
and β
1
= 0.5 and λ = 100 for computing
Generator Loss = Adversarial Loss + λ ∗ L1 Loss.
3.5 Integration
Once training is completed, we integrate the learned
LiDAR sensor network into our simulation environ-
ment and our network then predicts a LiDAR image,
as shown in Fig. 3. To convert back to a LiDAR point
cloud, a simple approach is to sample the map di-
rectly: (i) sample the visibility map, e.g. on a uni-
form grid, (ii) discard all points with small visibility,
(iii) determine the remaining samples’ depth from the
1
https://tensorflow.org/tutorials/generative/pix2pix
depth map, (iv) reproject the points into a 3D coordi-
nate space.
The resulting point cloud mimics the behavior of
the real sensor, in particular typically invisible points
are missing, but the original LiDAR pattern is proba-
bly not represented well.
A more expensive, but also more precise solution
is to generate virtual rays for the original LiDAR sam-
ples, compute their hit point by ray casting, and check
the visibility of the hit point in the predicted LiDAR
visibility map. This approach can also consider the
car movement during a LiDAR scan and thus repro-
duce the rolling shutter effect.
4 EXPERIMENTS AND RESULTS
Overall, our implementation achieves a visually rea-
sonable mapping between input image and LiDAR
projection. The training on the data translates well
to the test data sets and also generalizes on synthetic
data to a sufficient degree.
4.1 Qualitative Evaluation
Both, KITTI and A2D2 work with the same network
configuration and only require different filter kernels
to be applied as described in Section 3.3. Naturally,
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
180
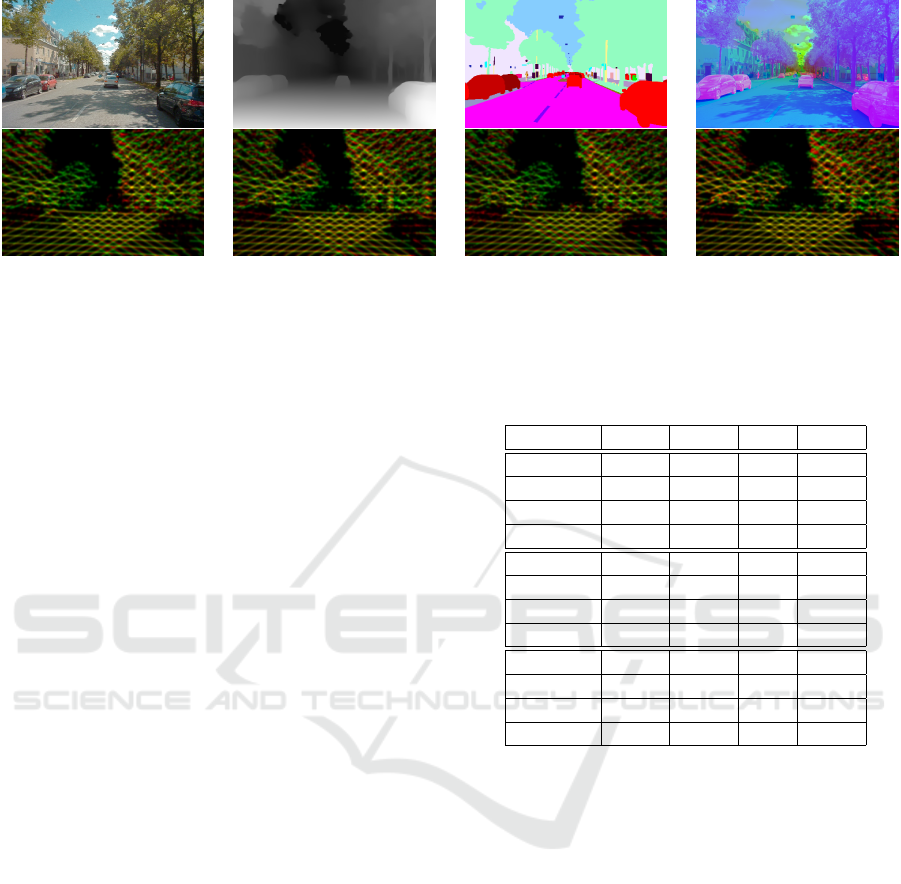
(a) Trained on Camera Im-
ages
(b) Trained on Depth Maps (c) Trained on Segmentation
Maps
(d) Trained on Combined
Images
Figure 4: Results on the A2D2 data set: lower image shows prediction (red) and ground truth (green), correctly predicted
pixels are consequently yellow.
there are significant differences resulting from the dif-
ferent training data sets and sensor configurations;
KITTI has higher LiDAR density, but a smaller up-
wards angle. This means that elevated objects like
traffic lights or trees are often not detected correctly.
Due to the reduced number of training samples
compared to A2D2, the KITTI results lack in visual
quality. Concerning the sensor artifacts, we observe
that the general projection pattern is acquired very
well by the network. The points in the distance are
also cut as limited by the sensor range but especially
the variants without depth are less effective here. In-
dividual objects, however, are harder to distinguish
by eye and reflection effects are inconsistent. With
a learning based approach, there is an upper limit to
what is possible, given the available input. In reality,
there are objects that appear very similar on camera
but have very different reflection attributes.
4.2 Quantitative Evaluation
For training we have used an Nvidia RTX 3080. We
use 32k training steps which can be completed in
less than half an hour, so our pipeline can be trained
quickly for new sensor configurations. Depending on
the data set, the network has not necessarily seen ev-
ery input picture once, but since consecutive frames
are very similar, more training has shown no benefit
in our experiments. Inference on the same GPU takes
17ms without any optimizations, which allows real-
time LiDAR simulation.
To evaluate the quality of our results, we predict
LiDAR images on real-world input from KITTI and
A2D2 and compare these with ground truth LiDAR
data. Depth images are estimated from the RGB im-
ages and as segmentation masks we use ground truth
data from the data sets.
We compute the L1 error (L1 = |A − B|) where A
Table 1: Evaluation on KITTI, A2D2 and VKITTI: Errors
on respective test set in percent.
L1 L1
+
L1
−
L2
KITTI RGB 8.64 6.14 2.50 14.33
KITTI Depth 8.08 4.92 3.16 13.58
KITTI Sem 8.72 5.90 2.82 14.44
KITTI Com 8.63 4.96 3.67 14.36
A2D2 RGB 10.52 5.44 5.08 17.02
A2D2 Depth 10.22 5.36 4.86 16.63
A2D2 Sem 10.55 10.16 0.39 17.02
A2D2 Com 10.38 6.01 4.38 16.90
VKITTI RGB 8.33 4.28 4.05 14.06
VKITTI Depth 8.64 4.88 3.76 14.26
VKITTI Sem 8.26 3.94 4.32 13.89
VKITTI Com 8.39 4.71 3.68 13.98
is the prediction and B is the ground truth). Moreover,
we define a positive error L1
+
= max(A−B, 0), where
the network predicts points that are not present in the
ground truth, and a negative error L1
−
= max(B −
A, 0), where points are missing in the prediction. Ad-
ditionally, we compute the L2 error.
The results in Tab. 1 show that the prediction re-
sults for RGB, depth, segmentation, and combined are
relatively close. Prediction on KITTI data works bet-
ter than for A2D2, which partly results from the larger
black space in the LiDAR projections. Depth seems
to work generally well, and since it is generated in
any simulation anyhow, it looks like a good candidate
for integration. However, one would have to examine
closer, whether features important for the following
task are well represented, e.g. car windows. The com-
bined mode showed no advantage, however smarter
ways to combine the three modalities might deliver
better results.
Overall, the quality of images trained in a network
like pix2pix cannot fully be estimated by pixel-wise
A Lightweight Machine Learning Pipeline for LiDAR-simulation
181

errors. Small shifts in the LiDAR pattern, for exam-
ple, result in large errors. Fig. 4 overlays the ground
truth and the prediction, showing deviations between
the different input types, most prominently in the dis-
tant parts, where a correct depth estimation becomes
important.
(a) Ground Truth LiDAR Image
(b) KITTI Prediction from Combined Image
(c) VKITTI Prediction from Combined Image
Figure 5: Comparing Results on VKITTI and KITTI. The
input image on top of (b) and (c) shows the combined image
with RGB (grayscale), depth and segmentation in the color
channels.
For an evaluation of the generalization of our
method to synthetic data, we use paired data from
KITTI and VKITTI. We use networks trained on real-
world data and apply them to synthetic images from
VKITTI. We predict LiDAR images and compare the
results with the ground truth LiDAR data from KITTI
as shown in Fig. 5. Results are shown in Tab. 1. Re-
sults of this comparison strongly depend on the devi-
ation between KITTI and VKITTI data, however, our
results still show good correspondence and a behavior
comparable to real world data.
5 DISCUSSION
With our approach of trying to obtain typical and real-
istic LiDAR data, we accept a higher numerical error.
The problem here is that there is no reference for a
visual or numerical comparison to existing data based
approaches. The quality of physics based simulation
on the other hand depends not only on the implemen-
tation of the sensor system but also on the environ-
ment. Even LiDARsim already operates on the ag-
gregated real world data geometry data, which makes
a direct result based comparison unfeasible.
The consequence would be to use indirect mea-
sures, e.g. follow the sim-to-real approach and se-
lect appropriate machine learning algorithms that take
point clouds as input and are trained on real data.
This allows to compare the performance between us-
ing real and synthetic point cloud sources. A second
option would be to augment training data for such
a network with synthetic point clouds to reduce the
need for real world data collection. But only a high
quality virtual twin of an environment would allow a
direct comparison. Especially the geometry ground
truth data does not align closely enough in VKITTI
(cf. Fig: 5, as the scene is here constructed from a pre-
defined set of objects. We believe that finding ways to
better measure realistic simulation will be an impor-
tant task to achieve virtual testing of ADAS.
Based on the results of LiDAR simulation with
pix2pix, experiments with other architectures become
very interesting. However, these often make specific
assumptions. So there is a need for an architecture
that is also specialized for this task and can make bet-
ter use of combined input data.
On the other hand, the quality of the training data
is arguably even more important. There are develop-
ments that can significantly improve this: Better sen-
sors and thus denser LiDAR scans would reduce the
resolution discrepancy between camera images and
LiDAR scans. Similarly, progress in 3d scene re-
construction can improve the data situation as well,
but the issues with dynamic objects and movement in
general currently can introduce further problems.
Given these possible developments, it is impor-
tant to have a baseline for future performance com-
parisons, which our pipeline provides.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
182

6 CONCLUSION
We have presented a pipeline for data based simu-
lation of LiDAR sensor behaviour, that generalizes
rather well for synthetic data inputs in simulation en-
vironments. While the general quality is not reli-
able enough for prediction of frame-accurate sensor
artefacts, the LiDAR simulation is capable of repro-
ducing them in general. We believe it is sufficient
for many use cases, that analyse the performance of
ADAS functions over many virtual road miles. With
the rapid developments of LiDAR technology, better
data sets will emerge naturally, while existing data
sets can be enhanced with new data fusion techniques
to exploit multiple consecutive frames.
ACKNOWLEDGEMENTS
Richard Marcus was supported by the Bayerische
Forschungsstiftung (Bavarian Research Foundation)
AZ-1423-20.
REFERENCES
Automotive, I. (2020). CarMaker. Publisher: IPG Automo-
tive GmbH.
Cabon, Y., Murray, N., and Humenberger, M. (2020). Vir-
tual kitti 2.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An Open Urban Driv-
ing Simulator. arXiv:1711.03938 [cs]. arXiv:
1711.03938.
Gaidon, A., Wang, Q., Cabon, Y., and Vig, E. (2016). Vir-
tual worlds as proxy for multi-object tracking analy-
sis.
Goodfellow, I. J., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial networks.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2018).
Image-to-Image Translation with Conditional Adver-
sarial Networks. arXiv:1611.07004 [cs]. arXiv:
1611.07004.
Johnson, J., Alahi, A., and Fei-Fei, L. (2016). Per-
ceptual Losses for Real-Time Style Transfer and
Super-Resolution. arXiv:1603.08155 [cs]. arXiv:
1603.08155.
Kirillov, A., Wu, Y., He, K., and Girshick, R. B. (2019).
Pointrend: Image segmentation as rendering. CoRR,
abs/1912.08193.
LG (2021). LGSVL Simulator,
https://www.lgsvlsimulator.com/.
Liao, Y., Xie, J., and Geiger, A. (2021). KITTI-360: A
novel dataset and benchmarks for urban scene under-
standing in 2d and 3d. arXiv.org, 2109.13410.
Manivasagam, S., Wang, S., Wong, K., Zeng, W.,
Sazanovich, M., Tan, S., Yang, B., Ma, W.-C.,
and Urtasun, R. (2020). LiDARsim: Realistic Li-
DAR Simulation by Leveraging the Real World.
arXiv:2006.09348 [cs]. arXiv: 2006.09348.
NVIDIA (2021). Nvidia drive sim,
https://developer.nvidia.com/drive/drive-sim.
Park, T., Liu, M.-Y., Wang, T.-C., and Zhu, J.-Y. (2019).
Semantic image synthesis with spatially-adaptive nor-
malization. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition.
Ranftl, R., Bochkovskiy, A., and Koltun, V. (2021). Vision
transformers for dense prediction. ArXiv preprint.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation.
Shah, S., Dey, D., Lovett, C., and Kapoor, A. (2017). Air-
Sim: High-Fidelity Visual and Physical Simulation
for Autonomous Vehicles. arXiv:1705.05065 [cs].
arXiv: 1705.05065.
Shorten, C. and Khoshgoftaar, T. M. (2019). A survey on
Image Data Augmentation for Deep Learning. Jour-
nal of Big Data, 6(1):60.
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Pat-
naik, V., Tsui, P., Guo, J., Zhou, Y., Chai, Y., Caine,
B., Vasudevan, V., Han, W., Ngiam, J., Zhao, H., Tim-
ofeev, A., Ettinger, S., Krivokon, M., Gao, A., Joshi,
A., Zhao, S., Cheng, S., Zhang, Y., Shlens, J., Chen,
Z., and Anguelov, D. (2020). Scalability in Percep-
tion for Autonomous Driving: Waymo Open Dataset.
arXiv:1912.04838 [cs, stat]. arXiv: 1912.04838.
Uhrig, J., Schneider, N., Schneider, L., Franke, U., Brox,
T., and Geiger, A. (2017). Sparsity invariant cnns. In
International Conference on 3D Vision (3DV).
VTD (2021). Virtual Test Drive.
Wang, L., Goldluecke, B., and Anklam, C. (2020). L2r gan:
Lidar-to-radar translation. In Proceedings of the Asian
Conference on Computer Vision (ACCV).
Wang, T.-C., Liu, M.-Y., Zhu, J.-Y., Tao, A., Kautz, J., and
Catanzaro, B. (2018a). High-resolution image synthe-
sis and semantic manipulation with conditional gans.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition.
Wang, Y., Chao, W.-L., Garg, D., Hariharan, B., Camp-
bell, M., and Weinberger, K. Q. (2018b). Pseudo-
LiDAR from Visual Depth Estimation: Bridging the
Gap in 3D Object Detection for Autonomous Driving.
arXiv:1812.07179 [cs]. arXiv: 1812.07179.
Weber, M., Xie, J., Collins, M., Zhu, Y., Voigtlaender, P.,
Adam, H., Green, B., Geiger, A., Leibe, B., Cremers,
D., Osep, A., Leal-Taixe, L., and Chen, L.-C. (2021).
Step: Segmenting and tracking every pixel. In Neural
Information Processing Systems (NeurIPS) Track on
Datasets and Benchmarks.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2020).
Unpaired Image-to-Image Translation using Cycle-
Consistent Adversarial Networks. arXiv:1703.10593
[cs]. arXiv: 1703.10593.
A Lightweight Machine Learning Pipeline for LiDAR-simulation
183
