
Conceptual Approach for Optimizing Air-to-Air Missile Guidance to
Enable Valid Decision-making
Philippe Ruther
*
, Michael Strohal
†
and Peter Stütz
‡
Institute of Flight Systems, Universität der Bundeswehr Munich, Werner-Heisenberg-Weg 39, 85577 Neubiberg, Germany
Keywords: Computer Generated Forces, Missile Guidance, Deep Reinforcement Learning, Optimal Control.
Abstract: In this paper, we briefly introduce a concept on how the workflow of a pilot in a beyond visual range mission
can be divided into different tasks in order to mimic the workflow in the behavioural control of adversary
computer generated forces in training simulations. An essential part of fighter pilots’ workflow is the decision-
making process, in which they must weigh opportunities against risks. Particularly in the weapon delivery
task, valid data are a basic prerequisite for making a confident decision when weighing one’s opportunities
against potential risks. Concerning the applicability of artificial intelligence methods, the optimization of a
missile's trajectory is used as an example to examine methods that allow an estimation of one’s chances based
on valid data to enable valid decision-making. For this purpose, we briefly introduce methods of optimal
control and in particular deep reinforcement learning. In the future, we intend to use data generated by optimal
control to validate the data provided by deep reinforcement learning methods as a basis for explainable
decision-making in training simulation and threat analysis.
1 INTRODUCTION
1.1 Overall Concept
Due to evolving technology and enhanced weapon
systems, simulating Computer-Generated Forces
(CGF) – especially the adversary side – in Beyond
Visual Range (BVR) air combat tactical scenarios is
becoming increasingly important.
A major objective in air combat training
simulators is to generate various scenarios in which
fighter pilots can apply and expand their knowledge
through new threat situations or try new tactics. In
order to achieve the main objective of any military
training centre ‘train as you fight, fight as you train’,
the artificially generated enemy forces must also be
represented in a valid manner. Therefore, two design
factors must be considered: On the one hand the
physical presence such as physical limits,
manoeuvrability, sensory systems or weapons must
be valid and on the other hand, the CGF behaviour as
described in doctrines or tactical instructions must be
appropriate and reviewable.
*
https://www.unibw.de/lft/personen/philippe-ruther-m-sc
†
https://www.unibw.de/lft/personen/dr-ing-akdir-michael-strohal
‡
https://www.unibw.de/lft/personen/univ-prof-dr-ing-peter-stuetz
However, generating behaviour requires expert
knowledge that is not always available. Furthermore,
once a behaviour model is implemented, its behaviour
is usually fixed and must be manually altered to
provide variations and different levels of
sophistication or challenges (Toubman et al., 2016).
There must be an ongoing process to develop new
scenarios to adapt to new threat situations using more
agile and verified opponent behaviour.
In order to represent adversary forces with higher
flexible behaviour in fighter pilots’ training
simulations, we aim to research to what extent
Artificial Intelligence (AI) methods are suitable for
this purpose. Various approaches already exist for
generating such CGF behaviour incorporating
methods of AI technology, e.g. (Xiao and Huang,
2011), (Dong et al., 2019), (Wang et al., 2021),
(Wang et al., 2020).
In general, the existing methods can be divided
into rule-based and machine learning AI methods
(Fasser, 2020).
Rule-based methods represent the behaviour of a
CGF using different predefined rules. By initiating a
304
Ruther, P., Strohal, M. and Stütz, P.
Conceptual Approach for Optimizing Air-to-Air Missile Guidance to Enable Valid Decision-making.
DOI: 10.5220/0011302800003274
In Proceedings of the 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2022), pages 304-310
ISBN: 978-989-758-578-4; ISSN: 2184-2841
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
predefined condition, a specific rule triggers a defined
behaviour. An example of such approaches are
behaviour trees or finite state machines (Johansson,
2018).
Machine learning AI methods like reinforcement
learning (Plaat, 2022) define a connection between a
predefined condition and a desired behaviour, thereby
establishing a suitable rule by adjusting internal
weights.
In our study, we want to investigate to what extent
machine learning approaches can be combined with
rule-based concepts to generate improved, verified
and validated behaviour models. Each of these AI
methods requires a clear definition framework. For
this reason, it is first necessary to describe the
behavioural pattern of a pilot in BVR air combat.
Therefore, the OODA loop (Observe, Orient, Decide,
Act) by Boyd (Richards, 2020) is often cited.
However, with this top-level approach, it is difficult
to describe a highly complex scenario like a BVR air
combat – a more specified and detailed concept of the
OODA loop is needed.
To tackle this, we designed a concept which
allows linking the behaviour of an enemy aircraft in
BVR air combat with potential AI methods and split
up the workflow and processes of a BVR engagement
into three main parts: attack, self-defence and decide.
Each of these has defined in- and output parameters.
This approach makes it possible to decompose the
complex application space of the OODA loop in BVR
air combat into many smaller tasks and to investigate
the suitability of various AI methods with respect to
the different tasks. A more in-depth look at the
workflow can be found in (Reinisch et al., 2022).
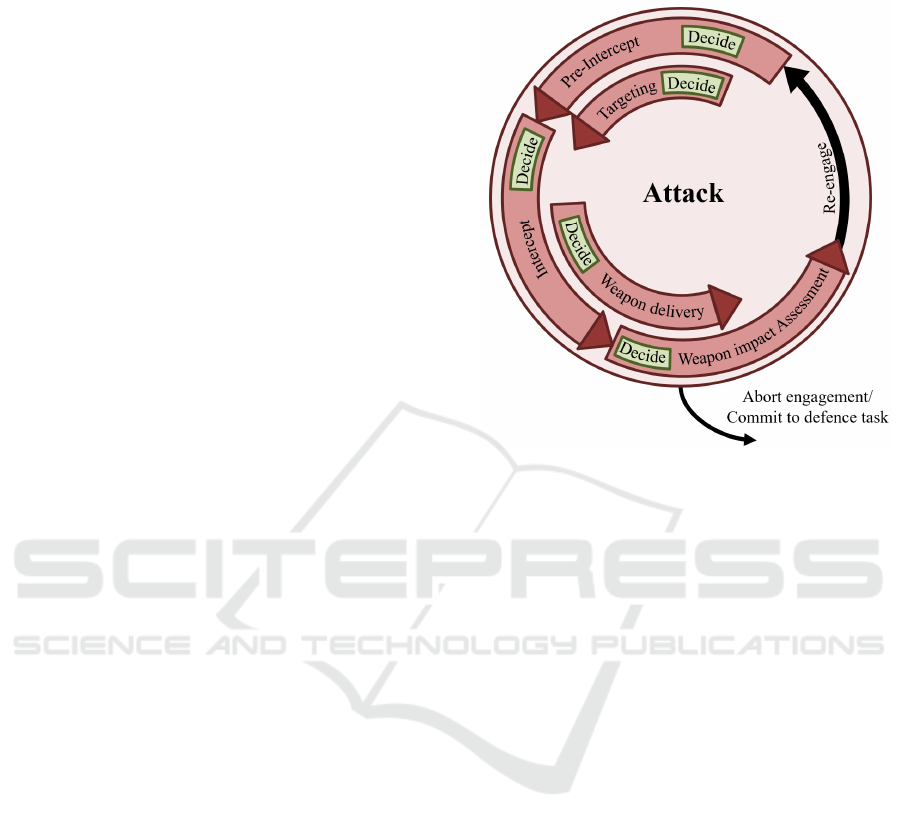
1.1.1 Attack
The main tasks of a CGF in offensive and defensive
air-to-air combat simulation are performed in the
attack loop. The tasks (see Figure 1) here are divided
into the following process tasks which will be briefly
explained here:
Pre-intercept describes the planning and
execution up to the fighting range supported by an
Airborne Warning And Control System (AWACS)
until the enemy targets are identified by the own
radar. While flying toward the enemy in the pre-
intercept phase, targeting is conducted and
coordinated by evaluating the targets. After assigning
a target, each CGF executes an intercept by flying
toward the target with the main goal of optimizing its
own aspect angle. During interception of the assigned
target, the decision whether to fire a missile or not is
made in the weapon delivery phase. The result of this
engagement is evaluated by the weapon impact
assessment.
Figure 1: Attack Loop.
1.1.2 Decide
The decide loop (see Figure 2) is executed
continuously during each task. First, scenario
information is updated. This includes static
information (e.g. predicted enemy weapon range
etc.), as well as dynamic information which, unlike
the static information, changes over the mission (e.g.
weapons status etc.). The dynamic information is
combined with the detection and identification of
enemy aircraft to form a so-called air picture. In each
cycle of the decision loop, information is first updated
to ensure the decision is made using an up-to-date air
picture.
Decisions in BVR workflow are made based on
weighing one’s own opportunity against the risk
(Stillion, 2015). Therefore, the first step is to perform
an assessment of its own situation in order to evaluate
the opportunities. The subsequent enemy assessment
allows conclusions to be made related to the current
risk. Based on this evaluation, all parameters (air
picture) that affect the execution of the specific
current task are taken into consideration.
This makes the following three decisions
possible:
Continue/Commit to attack task
Terminate mission
Continue/Commit to defence task
Conceptual Approach for Optimizing Air-to-Air Missile Guidance to Enable Valid Decision-making
305
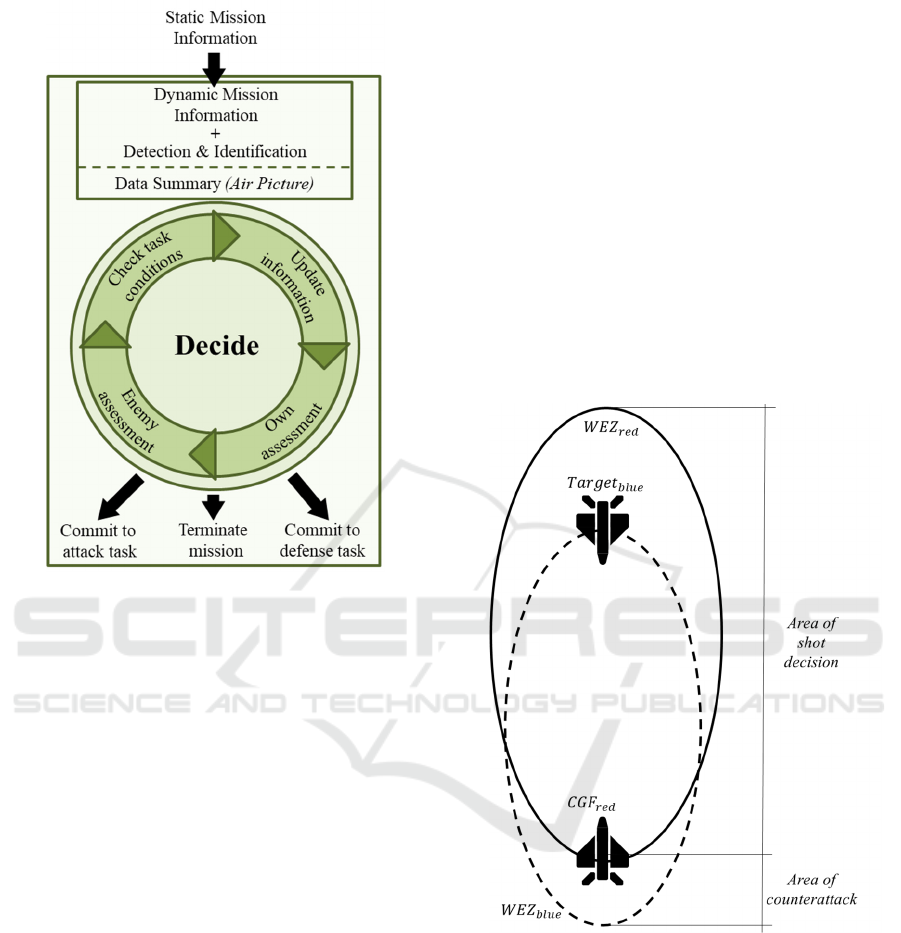
Figure 2: Decide Loop.
This continuous decision process makes it possible to
switch between the main loops attack and self-
defence at any time, as well as to abort the mission
through the self-defence loop as described in
(Reinisch et al., 2022).
1.2 Weapon Delivery Optimization
To test new tactics in a BVR air-to-air combat
simulation or to be able to evaluate a threat analysis,
the weapon range as well as an explainable time of
weapon launch have a decisive influence. Therefore,
the previously outlined weapon delivery phase
possesses a central role in defensive as well as
offensive scenarios. In this phase, after weighing up
own opportunities and risks, the decision to launch a
weapon is made.
An important parameter of this decision is the
maximum achievable range of the own Weapon
Engagement Zone (WEZ) under the condition of a
non-maneuvering target (see Figure 3). The larger the
WEZ, the sooner a potential opponent can be
engaged. Maximizing the WEZ is therefore a top
priority in BVR engagements. A large weapon range
leads to higher own security and lower own risk, as
well as more space and time to execute the own
strategy.
Another key parameter is the pilot's situational
risk level at the time of engagement. It changes
according to the air picture given in the decision loop
(Figure 2).
This risk level is especially affected by the current
threat situation (e.g. number of own aircraft, number
of enemy aircraft etc.). A low threat situation
corresponds to a pilot's low risk level. Therefore, the
pilot places a high value on flying only as deep as
necessary into the enemy WEZ, as predicted by the
static information of the decision loop. While
advancing into the enemy's WEZ increases the
probability of hitting the other aircraft, it also
negatively affects the own safety (risk of getting hit
by an incoming missile). Thus, there is a direct
correlation between risk level and the probability of
hitting the opponent as visualized in figure 3.
Figure 3: Weapon Engagement Zone of a CGF fighter
aircraft and a blue target.
In order to be able to decide on a suitable weapon
launch time within the weapon delivery phase, a valid
knowledge of the missile trajectory is an
indispensable prerequisite.
Therefore, the missile trajectory must first be
optimized using suitable methods to obtain an optimal
trajectory of the missile when given a certain risk
level which is directly related to the distance from the
target.
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
306
2 PROBLEM FORMULATION
AND OBJECTIVES
To achieve a valid decision regarding an optimal
weapon launch point, verification of the optimal
missile trajectory is of central importance. Only by
using a verified missile trajectory, it is possible to
estimate the own opportunities, which is a basic
prerequisite for the decision of launching a missile.
The underlying model determines to what extent the
weapon launch point is optimal with respect to the
own actual risk level.
Therefore, in this paper, we research a possible
implementation with respect to the optimization
procedure of the missile trajectory. The problem of
finding an optimal missile trajectory is well suitable
for studying machine learning approaches due to its
limited search space and manageable parameters
compared to learning other behavioural models
within the pre-defined BVR workflow. For this
purpose, we will use optimal control (Section 3) to
provide the verification of a machine learning
approach (Section 4). In the future, we aim to
continue investigating the most promising machine
learning approaches with respect to their applicability
to other tasks within the CGF behaviour workflow.
Because of our objective to represent valid CGFs
for a training mission, this paper employs a blue
enemy pilot and a friendly air-to-air missile, shot
from a red CGF. The blue aircraft’s position is
randomly initialized within a predefined bunch of
distances. Due to the problem formulation, a scenario
of two-dimensional planar engagement X- and Z-axis
will be discussed. The used missile model is a five
degree-of-freedom model with solid propulsion
consisting of boost and sustained thrust described in
(Zipfel and Schiehlen, 2001)
.
Trajectory shaping results in an advantage by
being able to fire earlier while minimizing the own
risk. The range of a missile is directly dependent on
the launch speed, the launch angle and the launch
altitude. The missile is able to achieve a higher range
through a higher climbing angle, since the drag of the
missile decreases
(
decreasing air density) with
increasing altitude (Fleeman, 2009).
To maximize the range, it’s beneficial to climb up
to an altitude with lower air density, taking advantage
of acceleration in the boost and sustain thrust phase.
Therefore, a trajectory with the maximum achievable
range R
max1
(beginning of WEZ) must first be defined.
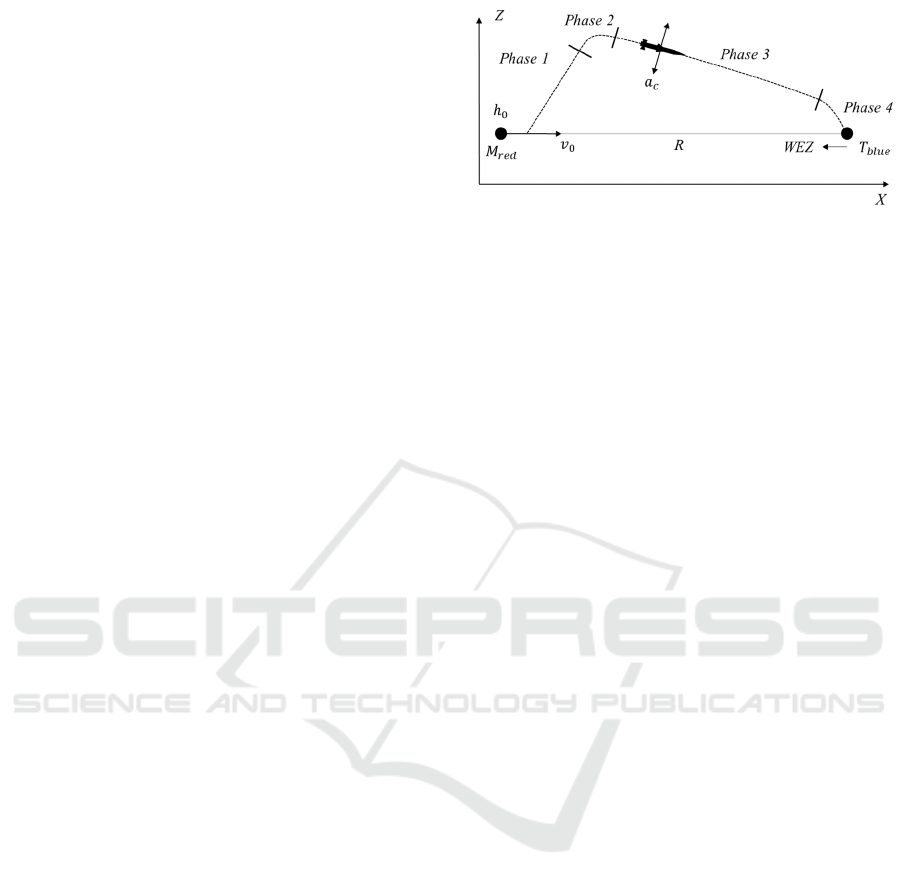
Figure 4: Planar engagement scenario.
This trajectory can be divided into four phases
(Figure 4):
• Phase 1: In the first phase, the missile is
launched at the start of the simulation. At
initialization, the pitch angle is set to 0° in a
specified height h
0
and an initial speed vector
v
0
parallel to the heading of the missile. The
pitch angle is kept constant for one second to
allow a safe missile separation from the host
aircraft. Following this, an angle change is
induced by varying the acceleration a
c
attached perpendicular to the missile’s
velocity vector while considering the
maximum possible physical forces. The
missile propulsion system is designed to
provide a short boost phase with a subsequent
sustain phase.
• Phase 2: After the missile is burned out, a
negative acceleration is commanded
perpendicular to the speed vector in order to
control its speed despite the lack of
propulsion.
• Phase 3: The missile is in a stationary decent
within the point of containing the best lift-to-
drag ratio (L/D)
max
to reach the maximum
power-off glide range.
• Phase 4: To follow a manoeuvring target, the
missile needs excess energy. The flight path
changes to a steeper descent to speed up.
We aim to design a pitch acceleration controller,
which creates the best trajectory concerning the
current distance from the target. The climb is a
premise, to generate maximum distance. If the target
is close to the launch point, lofting may not be
necessary.
To generate an optimal trajectory with respect to
the target distance, metrics must be created that can
be used to evaluate the missile trajectory:
Conceptual Approach for Optimizing Air-to-Air Missile Guidance to Enable Valid Decision-making
307
• The time t
end
[s] between missile launch and
target contact should be minimal. A long
missile flight time reduces the distance
between the own aircraft and the target,
therefore increasing the risk of a
counterattack.
• To be able to react to a manoeuvring target, the
missile should be able to fly at least one turn
having a bigger or equal maximum turn rate
ω
turn
[°/s] as its target. This requires a specific
range of Mach number at the target contact
point ma
end
[-]. The upper Mach limit
corresponds to the point at which the missile
can still follow the target with the same turn
rate while staying within its structural limits.
In this context, we describe a maximum speed
while considering the maximum turn rate close to the
target, a minimum flight time, as well as maximizing
the range of the missile as optimal.
3 OPTIMAL CONTROL
One approach to solving our defined problem is the
so-called optimal control theory. The objective of
optimal control is to find a control function which
transforms a system from an initial state to a final
state by optimizing pre-defined parameters,
considering the system dynamics and an arbitrary
number of specified path constraints. The time-
conditional state progression is the optimal trajectory
for the specified initial- and final state (Bryson,
Arthur E., Jr and Ho, 1975).
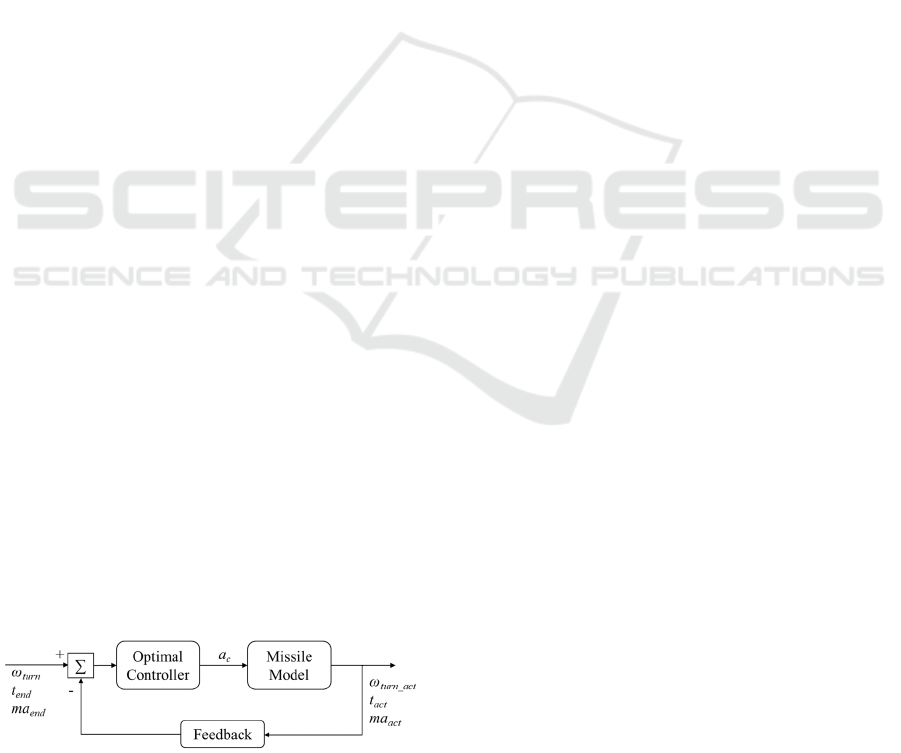
To describe the optimal missile trajectory and its
strong dependencies on its initial- and final state,
solutions for all states at each time step are required.
The closed-loop form of optimal control is
particularly suitable for this purpose, using a
feedback function (Figure 5), which can be used to
calculate the error in relation to the desired
parameters (which we want to be optimal). This
allows the optimization of the pitch acceleration
controller to find an optimal trajectory for any
distance to the target.
Figure 5: Feedback control loop.
The four missile trajectory phases (see section 2)
imply special constraints for the use of optimal
control theory:
• During the first phase, the system dynamics
can only be described in a nonlinear manner
since the mass of the system does change in a
non-linear way due to fuel consumption.
• The second phase represents the transition
section in which the system characteristics can
be linearized.
• At the point of best lift-to-drag ratio the
missile can be described using a linear system.
• To optimize the excess energy and turn rate
close to the target as well as taking into
account the possibility of a manoeuvring
target, the last phase can be described as
nonlinear.
Due to the described different system states,
several types of optimal control can be implemented.
Gain-scheduled model predictive control (GSMPC)
switches between a predefined set of controllers, to
control a nonlinear plant over a wide range of
operating conditions. (Wu et al., 2002) implements
the GSMPC in a missile autopilot and describes the
transformation of nonlinear missile dynamics into a
quasi-linear-parameter-varying (LPV) system and
demonstrates large performance improvements of the
controlled system.
In (Bachtiar et al., 2017) the method of nonlinear
model predictive control (MPC) is investigated. MPC
is known for its ability to handle nonlinearities and
constraints, making it suitable for high-performance
agile missiles operating near constraints for example
structural limits. However, MPC is a computationally
demanding method, therefore Bachtiar et al. present a
method to minimize the required computational
capacity.
(Sun et al., 2018) introduces the so-called
adaptive dynamic programming (ADP) method for
missile guidance. The aim here is to consider the
nonlinear behaviour of the target and therefore take
account of uncertainties.
If there are many parameter changes in initial- and
final states (e.g., varying initial altitude), optimal
control methods are very computationally intensive.
Nevertheless, in the context of verified CGF models, it
requires the possibility to test the results. (Chan and
Mitra, 2018) therefore present a Matlab tool, in which
a formal verification of an MPC could be accom-
plished. This tool provides an automated approach to
analysing MPC systems for their correctness.
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
308
4 DEEP REINFORCEMENT
LEARNING
Another method for solving the problem defined in
section 2 is deep reinforcement learning (DRL),
which is a subset of machine learning. In this method,
a computer agent based on a neural network is trained
to perform an optimal sequence of actions through
repeated trial-and-error interactions within a dynamic
environment (see Figure 6). The agent uses
observations from the environment to come up with a
series of actions to maximize the agent's cumulative
reward metric for the task. This learning takes place
without human intervention or explicit ruleset
programming. It can be used for decision problems
and as a nonlinear control application (François-
Lavet et al., 2018).
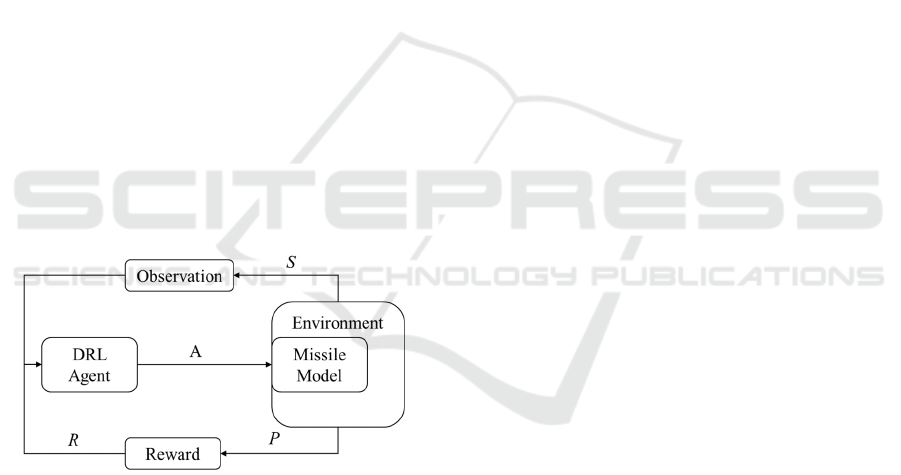
To optimize a missile trajectory, the DRL process
can be expressed using four tuples: (S, A, P, R). S
represents the state space of the air combat scenario
(e.g. position or velocity of missile and target, etc.),
A are the possible actions the agent is able to do like
in this example the commanded pitch acceleration a
C
described in section 2. P is representing the learned
transition probability from one state to another when
using the chosen action A, and R the reward the agent
obtains due to the status change (wrt. P) in the
environment by the selected action A.
Figure 6: DRL Concept.
The reward functions are used to teach the agent
to what extent it needs to adjust the control functions
to optimize to a maximum reward. Due to the simple
desirability of reward functions, there exist various
methods for missile guidance optimization. (Hong et
al., 2020) aims to find effective missile training
methods through reinforcement learning and
introduces its method with conditional reward
functions which are compared with the deep-
deterministic-policy-gradient (DDPG) method.
(Li et al., 2021) uses assisted deep reinforcement
learning (ARL), which predicts the acceleration of a
manoeuvring target to reduce the influence of
environmental uncertainty.
5 VERIFICATION AND
VA L I D AT I O N
Regarding the verification and validation, the
described methods need to be investigated in more
detail, since weighting in neural network layers does
not allow any conclusions to be tested. It has to be
examined to what extent the results of the DRL can
be verified and validated with the comparative
methods of optimal control.
Once the data generated by a DRL approach has
been verified and validated by optimal control, this
allows the methods to be used on additional tasks
from the attack loop described in section 1.
6 CONCLUSIONS AND
FORECAST
In this paper, we presented a concept on how to
decompose a pilots’ BVR air combat workflow to
generate the behaviour of adversary CGFs in training
simulations. Our primary goal is to investigate to
what extent machine learning approaches can be
combined with rule-based concepts to generate
verified and validated CGF behaviour models. A
major component of fighter pilots’ workflow is their
decision process, in which they have to weigh
opportunities and risks against each other. Especially
during weapon delivery, validated decisions are a
needed prerequisite to ensure success. Using the
example of missile trajectory optimization, we are
investigating methods to estimate own opportunities
based on validated data. In addition, the methods of
optimal control and in particular deep reinforcement
learning were briefly introduced.
Within the current work, we intend to use the
trajectory generated by optimal control to verify and
validate the trajectory generated by DRL methods.
The next steps of this research will focus on the
final implementation of a DRL as well as an optimal
control approach. To prove the feasibility of DRL in
our BVR air combat context, we have already set up
a sample scenario described in section 2 employing a
Deep-Q-Network (DQN). In the future, we intend to
use the trajectory generated by optimal control to
validate the trajectory generated by DRL methods to
enable valid, explainable decision-making.
Conceptual Approach for Optimizing Air-to-Air Missile Guidance to Enable Valid Decision-making
309

REFERENCES
Bachtiar, V., Manzie, C. and Kerrigan, E.C. (2017),
“Nonlinear Model-Predictive Integrated Missile
Control and Its Multiobjective Tuning”, Journal of
Guidance, Control, and Dynamics, Vol. 40 No. 11, pp.
2961–2970.
Bryson, Arthur E., Jr and Ho, Y.-C. (1975), Applied
Optimal Control, Taylor & Francis Group, New York.
Chan, N. and Mitra, S. (2018), CODEV: Automated Model
Predictive Control Design and Formal Verification
(Tool Paper).
Dong, Y., Ai, J. and Liu, J. (2019), “Guidance and control
for own aircraft in the autonomous air combat: A
historical review and future prospects”, Proceedings of
the Institution of Mechanical Engineers, Part G:
Journal of Aerospace Engineering, Vol. 233 No. 16, pp.
5943–5991.
Fasser, S. (2020), “Machine Learning vs Rules Based
Approach to Building Decisioning Software”.
Fleeman, E.L. (2009), Maximizing Missile Flight
Performance, Georgia Institute of Technology.
François-Lavet, V., Henderson, P., Islam, R., Bellemare,
M.G. and Pineau, J. (2018), “An Introduction to Deep
Reinforcement Learning”, Foundations and Trends®
in Machine Learning, Vol. 11 3-4, pp. 219–354.
Hong, D., Kim, M. and Park, S. (2020), “Study on
Reinforcement Learning-Based Missile Guidance
Law”, Applied Sciences, Vol. 10 No. 18, p. 6567.
Johansson, T. (2018), “Tactical Simulation in Air-To-Air
Combat. Evolutionary Algorithms and Behavior Tree
Framework”, Department of Computer Science,
Electrical and Space Engineering, University of
Technology, Luleå, 2018.
Li, W., Zhu, Y. and Zhao, D. (2021), “Missile guidance
with assisted deep reinforcement learning for head-on
interception of maneuvering target”, Complex &
Intelligent Systems.
Plaat, A. (2022), Deep Reinforcement Learning, a textbook.
Reinisch, F., Strohal, M. and Stütz, P. (2022), “Behaviour
Modelling of Computer-Generated-Forces in Beyond-
Visual-Range Air Combat”, Simultech2022.
Richards, C. (2020), “Boyds OODA Loop”, Necesse Vol 5,
Issue 1, pp. 142–165.
Stillion, J. (2015), Trends in Air-to-Air Combat:
Implications for Future Air Superiority, CSBA,
Washington, DC.
Sun, J., Liu, C. and Dai, J. (2018), “Robust optimal control
for missile-target guidance systems via adaptive
dynamic programming”, in 2018 Chinese Automation
Congress (CAC), Xi'an, China, 11/30/2018 - 12/2/2018,
IEEE, pp. 836–841.
Toubman, A., Roessingh, J.J., van Oijen, J., Lovlid, R.A.,
Hou, M., Meyer, C., Luotsinen, L., Rijken, R., Harris,
J. and Turcanik, M. (2016), “Modeling behavior of
Computer Generated Forces with Machine Learning
Techniques, the NATO Task Group approach”, in 2016
IEEE International Conference on Systems, Man, and
Cybernetics (SMC), Budapest, Hungary, 10/9/2016 -
10/12/2016, IEEE, pp. 1906–1911.
Wang, Z., Li, H., Wu, H. and Wu, Z. (2020), “Improving
Maneuver Strategy in Air Combat by Alternate Freeze
Games with a Deep Reinforcement Learning
Algorithm”, Hindawi.
Wang, Z., Li, H., Wu, Z. and Wu, H. (2021), “A pretrained
proximal policy optimization algorithm with reward
shaping for aircraft guidance to a moving destination in
three-dimensional continuous space”, International
Journal of Advanced Robotic Systems, Vol. 18 No. 1,
172988142198954.
Wu, F., Packard, A. and Balas, G. (2002), “Systematic
Gain-Scheduling Control Design: A Missile Autopilot
Example”, Asian Journal of Control, Vol. 4 No. 3, pp.
341–347.
Xiao, L. and Huang, J. (2011), “Maneuver Strategy in
Beyond-Visual-Range Air Combat”, IACSIT Press,
Singapore.
Zipfel, P.H. and Schiehlen, W. (2001), Modeling and
Simulation of Aerospace Vehicle Dynamics.
SIMULTECH 2022 - 12th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
310
